Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks



Abstract
:1. Introduction
1.1. Space-Borne Nodes
1.2. Airborne Nodes
1.3. Connectivity Technologies
2. Fundamentals of FSO Signal Transmission
2.1. Geometrical Loss
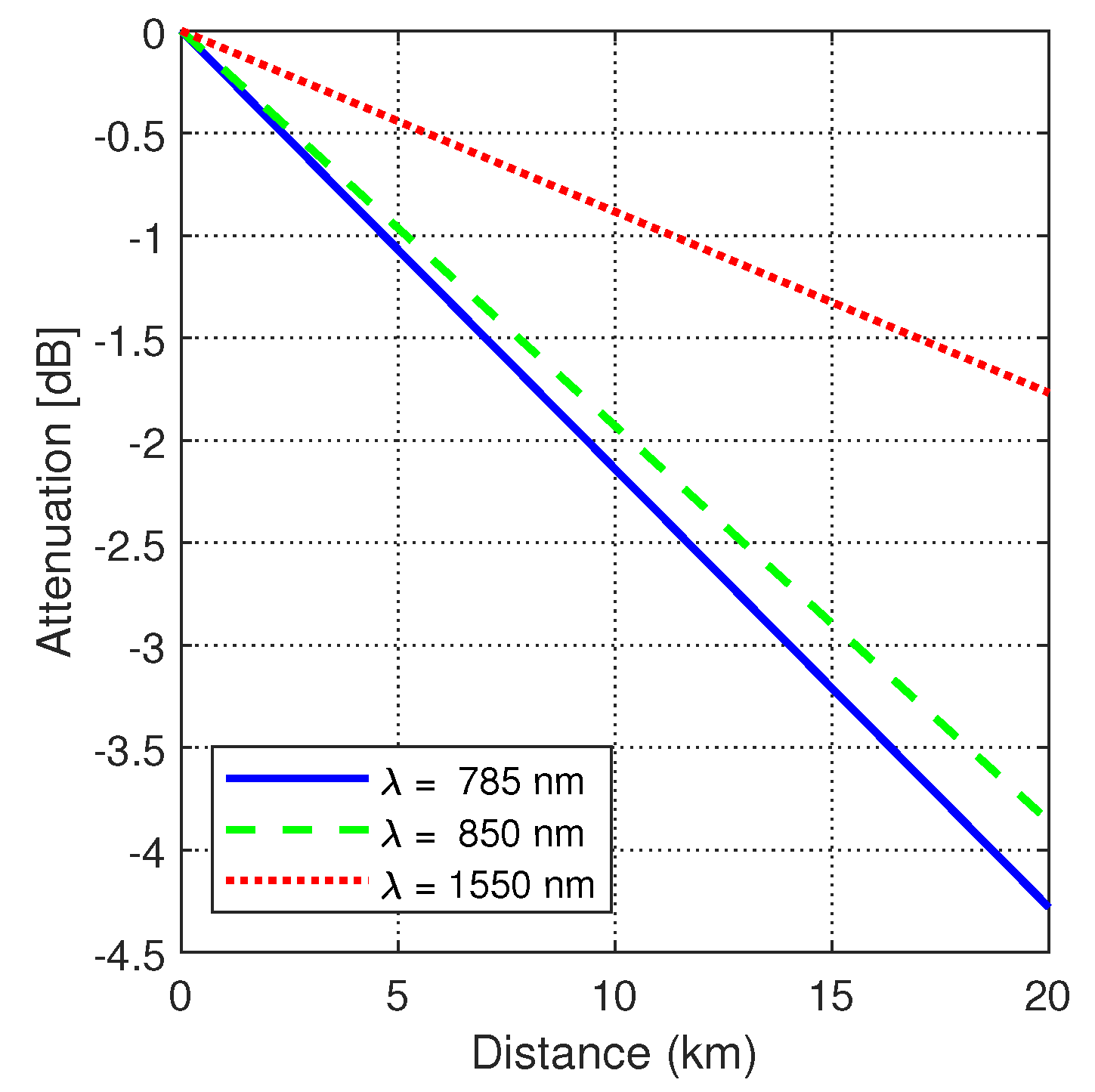
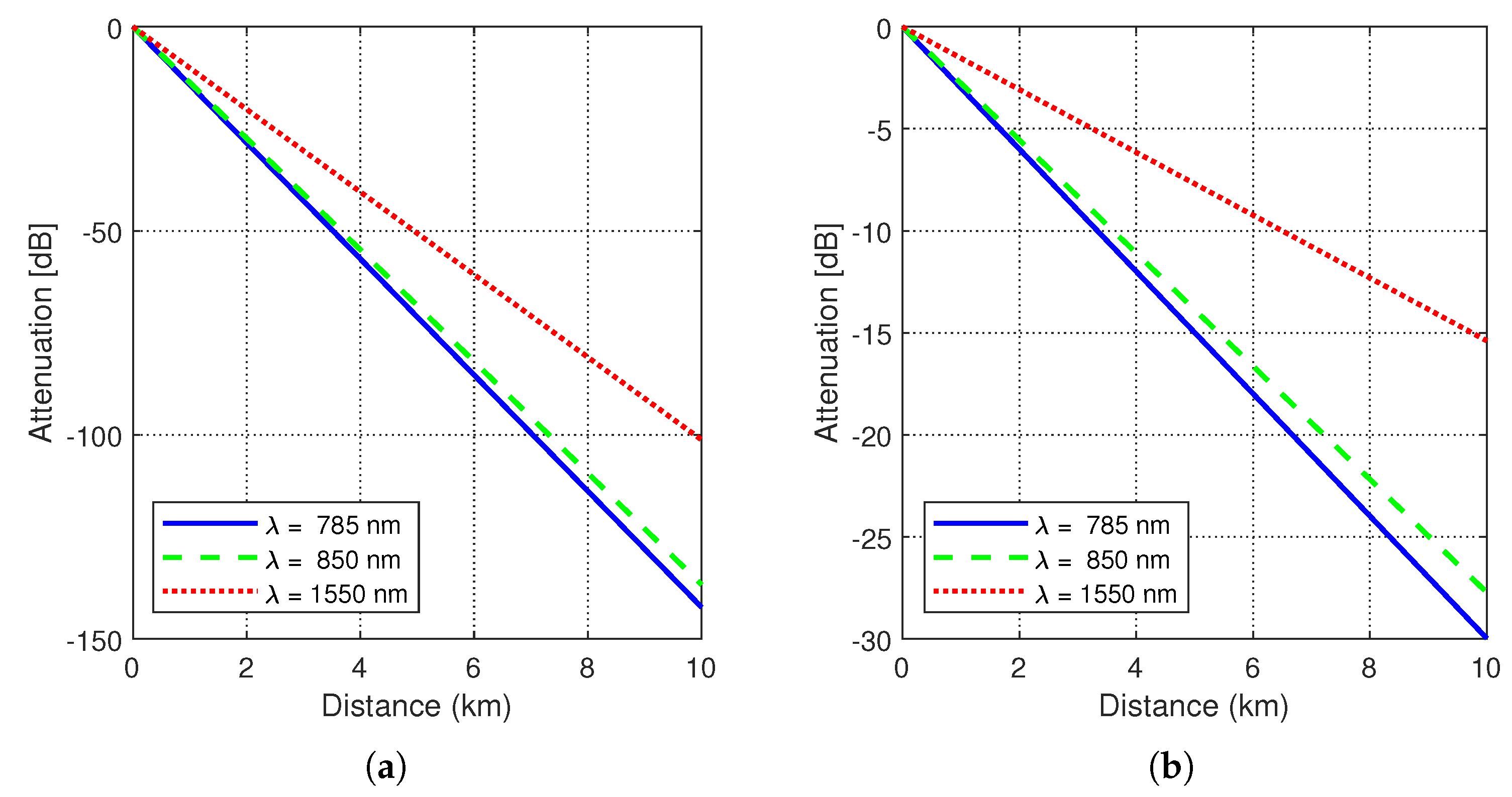
2.2. Atmospheric Attenuation
2.3. Turbulence-Induced Fading for Airborne Nodes
2.4. Pointing Error
2.5. Comparison of Power Loss Factors
- For very low visibility (e.g., 1 km), the attenuation losses caused by fog exceed 100 dBs and will dominate all other losses. (See Figure 6a).
- In clear weather conditions, the losses are typically a few dBs, which are comparable to the losses caused by rain, weak pointing error, and atmospheric turbulence;
- In moderate visibility, the losses are typically several dBs. These are comparable to the power losses caused by strong pointing errors;
- The geometrical loss for distances of tens of kilometers falls within the range of losses caused by clear weather’s atmospheric attenuation and rain. However, for satellite links, geometrical losses can reach tens of decibels, which is significantly greater than the rain loss (i.e., several decibels). For such long distances, it is important to consider the combined impact of geometrical loss and strong pointing errors;
- Rain-induced losses are independent of the wavelength, whereas both fog-induced losses and turbulence losses vary with the wavelength;
- Longer wavelengths tend to experience lower turbulence-induced losses compared to shorter wavelengths. For all cases, the turbulence loss is a few dBs on average.
3. FSO-Based Backhauling for NTNs
3.1. Backhaul System Architectures
3.2. Physical Layer Design
3.3. Self-Sustainability
4. Challenges and the Road Ahead
4.1. RIS for FSO-Based NTN
4.2. SDM/OAM for FSO-Based NTN
4.3. Handover Techniques in FSO-Based NTN
4.4. Scalability
4.5. Positioning and Localization
4.6. AI/ML Techniques for FSO-Based NTNs
- Real-time Adaptive Transmission: One notable application of AI/ML in this domain is the real-time optimization of airborne FSO link parameters. By continuously monitoring atmospheric conditions and system performance, AI/ML models could dynamically adjust key parameters like transmit power, modulation schemes, and beam steering angles, to maximize link quality. This adaptive optimization ensures efficient data transmission, even in challenging environments, such as those characterized by strong turbulence or fluctuating weather conditions. Furthermore, AI/ML algorithms could play an important role in optimizing path and trajectory planning within FSO-based NTNs. These optimization tasks must consider real-time factors such as link quality, terrain characteristics, weather conditions, and energy harvesting and consumption considerations. In fact, the application of AI/ML in FSO communication systems holds significant promise for improving various aspects of performance;
- Pointing Errors: Pointing errors in NTN communication systems can result from the dynamic movement of UAVs and HAPSs, leading to misalignment of communication beams. These errors can significantly degrade link performance, causing signal loss and interference. To address this challenge, adaptive tracking mechanisms, combined with AI/ML algorithms, can be employed. AI/ML can continuously analyze sensor data, predict movement patterns, and make real-time adjustments to the beam direction. Advanced sensors, such as Global Positioning System (GPS)-/GNSS-based tracking and inertial navigation systems, enhance the accuracy of AI-driven pointing error mitigation strategies;
- Atmospheric Turbulence and Other Disturbances: Atmospheric turbulence leads to fluctuations in the refractive index of the atmosphere, resulting in beam wander and beam broadening effects. To mitigate the impact of atmospheric turbulence, AI/ML-powered AOs techniques can be potentially used. These techniques involve the use of deformable mirrors and wavefront sensors, guided by AI/ML algorithms, to dynamically correct phase distortions introduced by atmospheric turbulence. AI/ML can analyze turbulence patterns, adjust optical elements, and optimize beam quality in real time, ensuring a stable communication link, even under turbulent conditions. To combat scintillation index effects, AI/ML can be applied to analyze historical data on scintillation index patterns, allowing for predictive scintillation index mitigation strategies. Apart from turbulence, atmospheric disturbances like cloud, rain, and snow can challenge NTN communication. AI/ML can assist in managing these disturbances, by analyzing weather data and predicting atmospheric conditions. AI/ML models can provide advanced weather forecasting, enabling dynamic routing algorithms to make proactive decisions about traffic rerouting during adverse weather conditions. In vertical/slant FSO links between HAPSs and lower-altitude UAVs or ground base stations, cloud effects can disrupt communication. AI/ML algorithms can incorporate real-time data on cloud distribution and wind direction to predict when clouds might obstruct these vertical/slant FSO links. Additionally, in horizontal FSO links where communication between low-altitude UAVs is susceptible to blockages by high buildings, advanced routing algorithms, and obstacle-aware protocols could be employed to optimize data transmission paths and mitigate potential disruptions caused by urban environments;
- Trajectory Planning: AI/ML algorithms can be used for trajectory planning within FSO-based NTNs. When determining the optimal path/trajectory, these models prioritize key factors such as real-time link quality, terrain characteristics, weather conditions, energy considerations, scalability, energy efficiency, and positioning/localization issues. By integrating sensor data and historical information, these models make intelligent decisions based on these factors, ensuring efficient and reliable data transmission. For instance, they can monitor signal quality at different locations within the network and use historical data to predict future link quality. Additionally, they can analyze topographical and geographical data to identify potential obstructions or reflective surfaces affecting the FSO link;
- Energy Efficiency: AI/ML models can factor in real-time data on energy generation, such as from solar panels on UAVs, and monitor energy consumption patterns based on network load. By considering these factors, AI/ML models can dynamically adjust the path and trajectory of UAVs to optimize energy harvesting and minimize energy expenditure. Additionally, energy harvesting can, not only be derived from the sun, but also from dedicated laser sources on the ground that can power low-altitude UAVs. For instance, balloons in the stratospheric layer can harvest solar power and then utilize dedicated laser sources to power fixed-wing HAPS. AI/ML technologies may facilitate the seamless integration of these energy sources into the network;
- RIS for FSO-based NTN: RIS can significantly enhance the performance of FSO-based NTN networks. AI/ML techniques can be employed to optimize the deployment and configuration of RIS elements within a network. These models can analyze real-time FSO link conditions, including signal quality and interference, and dynamically adjust the RIS elements’ phase shifts and placements, to improve link reliability and throughput. They could also help in adjusting the beam directions based on the new locations of airborne nodes;
- SDM/OAM for FSO-based NTN: AI/ML models could play a crucial role in optimizing the use of SDM and OAM by dynamically selecting appropriate spatial modes and OAM states based on real-time channel conditions and traffic demands. These techniques can adapt to changing link quality and interference scenarios, ensuring efficient and reliable data transmission in FSO-based NTN networks;
- Handover: AI/ML algorithms can facilitate seamless handover by continuously monitoring the position and movement of nodes, predicting the optimal time for handover, and selecting the best available FSO link or network segment, for uninterrupted communication. These techniques could enhance a network’s ability to maintain connectivity, ensuring a seamless user experience in dynamic NTN environments.
- Scalability: AI/ML techniques can leverage real-time data analysis to dynamically adjust network size and configuration based on evolving demands and changing environmental conditions. By continuously monitoring and predicting network traffic patterns, AI/ML could ensure the efficient allocation of resources and enhance a network’s ability to accommodate varying levels of traffic. This adaptability and resource efficiency are critical for ensuring the scalability and long-term sustainability of FSO-based NTNs in the face of dynamic operational requirements and growth;
- Positioning and Localization Issues: AI/ML could assist in addressing these challenges by utilizing advanced positioning technologies like GNSS and combining them with AI-driven optimal placement of nodes. Through the integration of AI/ML, the system could continuously learn from real-time data, leading to enhanced accuracy and robustness in tracking and pinpointing the exact location of objects in various challenging environments, such as urban canyons or indoor settings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| AI | Artificial Intelligence |
| AI/ML | Artificial Intelligence/Machine Learning |
| AO | Adaptive Optics |
| APD | Avalanche Photodiode |
| AWGN | Additive White Gaussian Noise |
| BER | Bit Error Rate |
| CM/CD | Coherent Modulation/Coherent Demodulation |
| CNN | Convolutional Neural Network |
| Comsat | Communications Satellite Corporation |
| COW | Cell on Wings |
| DGG | Double Generalized Gamma |
| DQL | Deep Q-Learning |
| DSP | Digital Signal Processor |
| EDFA | Erbium-Doped Fiber Amplifier |
| Eutelsat | European Telecommunications Satellite Organization |
| FOLODE | First-Order Linear Ordinary Differential Equation |
| FoV | Field-of-View |
| FSO | Free-Space Optical |
| GEO | Geostationary Orbit |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| HALE | High Altitude Long Endurance |
| HALE-UAS | High Altitude Long Endurance Unmanned Aerial System |
| HAPS | High-Altitude Platform Station |
| i.i.d | Independent and Identical Distributed |
| IM/DD | Intensity Modulation/Direct Detection |
| INMARSAT | International Maritime Satellite Organization |
| INS | Inertial Navigation System |
| Intelsat | International Telecommunications Satellite Organization |
| IoT | Internet of Things |
| IRS | Intelligent Reflecting Surface |
| KARI | Korea Aerospace Research Institute |
| LD | Laser Diode |
| LDPC | Low-Density Parity Check |
| LED | Light Emitting Diode |
| LEO | Low Earth Orbit |
| LO | Local Oscillator |
| LoS | Line of Sight |
| LTE | Long-Term Evolution |
| MDM | Mode-Division Multiplexing |
| MEO | Medium Earth Orbit |
| MIMO | Multiple-Input Multiple-Output |
| MMW | Millimeter Wave |
| MPPT | Maximum Power Point Tracking |
| MTD | Machine-Type Device |
| NFP | Networked Flying Platform |
| NTN | Non-Terrestrial Network |
| OAM | Orbital Angular Momentum |
| OOK | On-Off Keying |
| PAT | Pointing Acquisition-Tracking |
| PCS | Probabilistic Constellation Shaping |
| Probability Density Function | |
| PHASA | Persistent High Altitude Solar Aircraft |
| PIN | Positive-Intrinsic-Negative |
| PLL | Phase-Locked Loop |
| PPM | Pulse Position Modulation |
| PSK | Phase Shift Keying |
| PV | Photovoltaic |
| QAM | Quadrature Amplitude Modulation |
| QoS | Quality of Service |
| QPSK | Quadrature-Phase-Shift-Keying |
| RF | Radio Frequency |
| RIS | Reconfigurable Intelligent Surface |
| RLN | Rician–Lognormal |
| SDM | Spatial Division Multiplexing |
| SES | Société Européenne des Satellites |
| SNR | Signal-to-Noise Ratio |
| SWIPT | Simultaneous Wireless Information and Power Transfer |
| Telesat | Canadian Telecommunications Satellite |
| THz | Terahertz |
| TIA | Transimpedance Amplifier |
| UAV | Unmanned Aerial Vehicle |
| U-PAM | Unipolar Pulse Amplitude Modulation |
| WRC | World Radiocommunication Conference |
References
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Huq, K.M.S.; Rodriguez, J. Backhauling/Fronthauling for Future Wireless Systems; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Trestian, R.; Muntean, G.M. Paving the Way for 5G through the Convergence of Wireless Systems; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Kretschmer, M.; Jensen, M.; Radmacher, M.; Rey-Moreno, C.; Schutz, E. Connecting the Unconnected–Tackling the Challenge of Cost-Effective Broadband Internet in Rural Areas. Tech. Rep., Fraunhofer Institute for Applied Information Technology. 2019. Available online: https://www.wiback.org/content/dam/wiback/en/documents/Study_Connect%20the%20Unconnected_2019.pdf (accessed on 5 September 2023).
- Rinaldi, F.; Maattanen, H.L.; Torsner, J.; Pizzi, S.; Andreev, S.; Iera, A.; Koucheryavy, Y.; Araniti, G. Non-terrestrial networks in 5G & beyond: A survey. IEEE Access 2020, 8, 165178–165200. [Google Scholar]
- Dahlman, E.; Parkvall, S.; Skold, J. 5G NR: The Next Generation Wireless Access Technology, 2nd ed.; Academic Press: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Sattarzadeh, A.; Liu, Y.; Mohamed, A.; Song, R.; Xiao, P.; Song, Z.; Zhang, H.; Tafazolli, R.; Niu, C. Satellite-Based Non-Terrestrial Networks in 5G: Insights and Challenges. IEEE Access 2022, 10, 11274–11283. [Google Scholar] [CrossRef]
- Azari, M.M.; Solanki, S.; Chatzinotas, S.; Kodheli, O.; Sallouha, H.; Colpaert, A.; Montoya, J.F.M.; Pollin, S.; Haqiqatnejad, A.; Mostaani, A.; et al. Evolution of non-terrestrial networks from 5G to 6G: A survey. IEEE Commun. Surv. Tutor. 2022, 24, 2633–2672. [Google Scholar] [CrossRef]
- Geraci, G.; Garcia-Rodriguez, A.; Azari, M.M.; Lozano, A.; Mezzavilla, M.; Chatzinotas, S.; Chen, Y.; Rangan, S.; Di Renzo, M. What will the future of UAV cellular communications be? A Flight from 5G to 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1304–1335. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, J.; Bennis, M.; Ko, Y.C. Integrating LEO satellites and multi-UAV reinforcement learning for hybrid FSO/RF non-terrestrial networks. IEEE Trans. Veh. Technol. 2023, 72, 3647–3662. [Google Scholar] [CrossRef]
- Al-Hraishawi, H.; Chougrani, H.; Kisseleff, S.; Lagunas, E.; Chatzinotas, S. A survey on nongeostationary satellite systems: The communication perspective. IEEE Commun. Surv. Tutor. 2023, 25, 101–132. [Google Scholar] [CrossRef]
- Abdelsadek, M.Y.; Chaudhry, A.U.; Darwish, T.; Erdogan, E.; Karabulut-Kurt, G.; Madoery, P.G.; Yahia, O.B.; Yanikomeroglu, H. Future space networks: Toward the next giant leap for humankind. IEEE Trans. Commun. 2023, 71, 949–1007. [Google Scholar] [CrossRef]
- GSMA. Wireless Backhaul Evolution: Delivering Next-Generation Connectivity. GSMA Report. 2021. Available online: https://www.gsma.com/spectrum/wp-content/uploads/2022/04/wireless-backhaul-spectrum.pdf (accessed on 5 September 2023).
- GSMA. 5G Spectrum GSMA Public Policy Position. GSMA Report. 2022. Available online: https://www.gsma.com/spectrum/wp-content/uploads/2022/06/5G-Spectrum-Positions.pdf (accessed on 5 September 2023).
- Borralho, R.; Mohamed, A.; Quddus, A.U.; Vieira, P.; Tafazolli, R. A Survey on coverage enhancement in cellular networks: Challenges and solutions for future deployments. IEEE Commun. Surv. Tutor. 2021, 23, 1302–1341. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J. Cognitive Satellite System; World Scientific: Singapore, 2020. [Google Scholar]
- GSMA. High Altitude Platform Systems: Towers in the Skies. GSMA Report. 2021. Available online: https://www.gsma.com/futurenetworks/wp-content/uploads/2021/06/GSMA-HAPS-Towers-in-the-skies-Whitepaper-2021-1.pdf (accessed on 5 September 2023).
- Sonkar, S.; Kumar, P.; Puli, Y.T.; George, R.C.; Philip, D.; Ghosh, A.K. Design & Implementation of an Electric Fixed-wing Hybrid VTOL UAV for Asset Monitoring. J. Aerosp. Technol. Manag. 2023, 15, e0823. [Google Scholar]
- Ismaiel, A.M.; Elsaidy, E.; Albagory, Y.; Atallah, H.A.; Abdel-Rahman, A.B.; Sallam, T. Performance improvement of high altitude platform using concentric circular antenna array based on particle swarm optimization. AEU-Int. J. Electron. Commun. 2018, 91, 85–90. [Google Scholar] [CrossRef]
- Cui, J.; Ng, S.X.; Liu, D.; Zhang, J.; Nallanathan, A.; Hanzo, L. Multiobjective optimization for integrated ground-air-space networks: Current research and future challenges. IEEE Veh. Technol. Mag. 2021, 16, 88–98. [Google Scholar] [CrossRef]
- Zountouridou, E. A guide to unmanned aerial vehicles performance analysis—The MQ-9 unmanned air vehicle case study. J. Eng. 2023, 2023, e12270. [Google Scholar] [CrossRef]
- Aerospace Technology. Available online: https://www.aerospace-technology.com/projects/scaneagle-3-unmanned-aircraft-system/ (accessed on 5 September 2023).
- Clarke, A.C. Extra-Terrestrial Relays; Wireless World: Hastings, UK, 1945; pp. 305–308. [Google Scholar]
- Sourbès-Verger, I.; Jung, Y. Space Policy and Space Technology. Available online: https://hal.science/hal-03098724/document (accessed on 5 September 2023).
- Kamalipour, Y.R. Global Communication: A Multicultural Perspective; Rowman & Littlefield: London, UK, 2020. [Google Scholar]
- Cochetti, R. Mobile Satellite Communications Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Mahmoud, M.S.B.; Guerber, C.; Larrieu, N.; Pirovano, A.; Radzik, J. Aeronautical Air-Ground Data Link Communications; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Iridium Communications. Available online: https://www.iridium.com/network/ (accessed on 5 September 2023).
- Christensen, C.; Beard, S. Iridium: Failures & Successes. Acta Astronaut. 2001, 48, 817–825. [Google Scholar]
- Golovanevsky, L.; Pattabiraman, G.; Thakar, K.; Yallapragada, R. Globalstar Link Verification. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 21–24 September 1999; pp. 1182–1187. [Google Scholar]
- Varrall, G. 5G and Satellite Spectrum, Standards, and Scale; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Starlink Technology. Available online: https://www.starlink.com/technology (accessed on 5 September 2023).
- Starlink Legal Documents. Available online: https://www.starlink.com/legal/documents/DOC-1400-28829-70 (accessed on 5 September 2023).
- Low Earth Orbit Megaconstellations Reach Record Capacity. Available online: https://aerospaceamerica.aiaa.org/year-in-review/low-earth-orbit-megaconstellations-reach-record-capacity/ (accessed on 5 September 2023).
- Cakaj, S. The Parameters Comparison of the “Starlink” LEO Satellites Constellation for Different Orbital Shells. Front. Commun. Networks 2021, 2, 643095. [Google Scholar] [CrossRef]
- Amazon’s Project Kuiper Satellite Internet Antennas. Available online: https://www.cnbc.com/2023/03/14/amazon-first-look-project-kuiper-satellite-internet-antennas.html (accessed on 5 September 2023).
- OneWeb Satellite Missions. Available online: https://www.eoportal.org/satellite-missions/oneweb (accessed on 5 September 2023).
- Han, J. Recent Progress and Future Development in Satellite Communication. Highlights Sci. Eng. Technol. 2022, 27, 38–45. [Google Scholar] [CrossRef]
- Ren, Z.; Li, W.; Jin, J.; Zhan, Y. Radio Resource Allocation for Multi-Antenna Gateway Stations of Diverse NGSO Constellation Networks. IET Commun. 2022, 16, 734–744. [Google Scholar] [CrossRef]
- F-Cell Technology from Nokia Bell Labs Revolutionizes Small Cell Deployment. Available online: http://finance.yahoo.com/news/f-cell-technology-nokia-bell-112005468.html (accessed on 5 September 2023).
- AT&T Introduces 5G Flying COWs (Cell on Wings) Drones. Available online: https://techblog.comsoc.org/2022/06/22/att-introduces-5g-flying-cows-cell-on-wings-drones/ (accessed on 5 September 2023).
- Flying Cows Bring Cell Service to Areas Impacted by Natural Disasters. Available online: https://www.businessinsider.com/flying-cows-bring-cell-service-to-areas-impacted-natural-disasters-2021-8 (accessed on 5 September 2023).
- Flying COWs? Available online: https://svarc.us/atts-firstnet-drones-take-flight-during-hurricane-ida/ (accessed on 5 September 2023).
- Boley, A.C.; Byers, M. Satellite Mega-Constellations Create Risks in Low Earth Orbit, the Atmosphere and on Earth. Sci. Rep. 2021, 11, 10642. [Google Scholar] [CrossRef]
- Thunderhead Balloon Systems. Available online: https://aerostar.com/products/balloons-airships/thunderhead-balloons (accessed on 5 September 2023).
- Loon: Expanding Internet Connectivity with Stratospheric Balloons. Available online: http://www.google.com/loon/ (accessed on 5 September 2023).
- Stratospheric Platforms to Improve Life on Our Planet. Available online: https://www.sceye.com/ (accessed on 5 September 2023).
- Thunderhead Flight 593. Available online: https://stratocat.com.ar/fichas-e/2022/RVN-20220503.htm (accessed on 5 September 2023).
- Google’s Balloons versus Facebook’s Drones: The Dogfight to Send Internet from the Sky. Available online: https://www.theverge.com/2014/3/7/5473692/facebook-drone-titan-aerospace-project-loon (accessed on 5 September 2023).
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and Multilayer UAV Networks for Next-Generation Wireless Communication and Power Transfer: A Feasibility Study. IEEE Internet Things J. 2019, 6, 7103–7115. [Google Scholar] [CrossRef]
- Google Balloons, “Cell Towers in the Sky”, Can Serve 4G to a Whole State. Available online: https://arstechnica.com/information-technology/2015/03/google-balloons-cell-towers-in-the-sky-can-serve-4g-to-a-whole-state/ (accessed on 5 September 2023).
- Li, P.; Xu, J. Fundamental Rate Limits of UAV-Enabled Multiple Access Channel with Trajectory Optimization. IEEE Trans. Wirel. Commun. 2020, 19, 458–474. [Google Scholar] [CrossRef]
- Zephyr: The First Stratospheric UAS of Its Kind. Available online: https://www.airbus.com/en/products-services/defence/uas/uas-solutions/zephyr (accessed on 5 September 2023).
- HAPSMobile’s Stratospheric Test Flight Opens A New Chapter for the Internet. Available online: https://www.softbank.jp/en/sbnews/entry/20201013_01 (accessed on 5 September 2023).
- Solar-Powered Unmanned Aerial Vehicle Flies for 53 Straight Hours. Available online: https://www.korea.net/NewsFocus/Sci-Tech/view?articleId=189247 (accessed on 5 September 2023).
- HALE UAS: High Altitude Long Endurance (HALE) Unmanned Aerial System (UAS). Available online: https://www.swiftengineering.com/r-and-d/hale-haps-uas/ (accessed on 5 September 2023).
- Ground-Breaking Solar Powered Unmanned Aircraft Makes First Flight. Available online: https://www.baesystems.com/en/article/ground-breaking-solar-powered-unmanned-aircraft-makes-first-flight (accessed on 5 September 2023).
- Skydweller Solar-Powered Aircraft Achieves First Autonomous Flight. Available online: https://www.shephardmedia.com/news/air-warfare/skydweller-aeros-solar-powered-aircraft-achieves-first-fully-autonomous-flight/ (accessed on 5 September 2023).
- After 64 Days, the Army’s Drone That Wouldn’t Die Has Died. Available online: https://taskandpurpose.com/news/after-64-days-the-armys-drone-that-wouldnt-die-has-died/#:~:text=After%2064%20days%20in%20the,on%20the%20ground%20in%20Arizona (accessed on 5 September 2023).
- Symmetry Electronics. Leo vs. Meo vs. Geo Satellites: What’s the Difference? Available online: https://www.symmetryelectronics.com/blog/leo-vs-meo-vs-geo-satellites-what-s-the-difference-symmetry-blog/ (accessed on 5 September 2023).
- Telesat. IFC Buyers Guide: Key Questions You Should Ask When Evaluating Connectivity Networks to Ensure a Superior Passenger Experience. Available online: https://www.telesat.com/resources/ifc-buyers-guide/ (accessed on 5 September 2023).
- Bailey, J. LEO, GEO, MEO Satellites—What’s the Difference? 2020. Available online: https://simpleflying.com/leo-geo-meo-satellites-whats-the-difference/ (accessed on 5 September 2023).
- Marsic, V.; Faramehr, S.; Fleming, J.; Ball, P.; Ou, S.; Igic, P. Buried RF Sensors for Smart Road Infrastructure: Empirical Communication Range Testing, Propagation by Line of Sight, Diffraction and Reflection Model and Technology Comparison for 868 MHz–2.4 GHz. Sensors 2023, 23, 1669. [Google Scholar] [CrossRef]
- School of Physics. Speed of Radio Waves. Available online: https://www.animations.physics.unsw.edu.au/jw/light/speed-of-radio-waves.htm (accessed on 5 September 2023).
- Khalighi, M.A.; Uysal, M. Survey on Free Space Optical Communication: A Communication Theory Perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Optical Communication in Space: Challenges and Mitigation Techniques. IEEE Commun. Surv. Tutor. 2017, 19, 57–96. [Google Scholar] [CrossRef]
- Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M.; Zhang, T. A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications. IEEE Commun. Surv. Tutor. 2018, 20, 1104–1123. [Google Scholar] [CrossRef]
- Alimi, I.A.; Teixeira, A.L.; Monteiro, P.P. Toward an Efficient C-RAN Optical Fronthaul for the Future Networks: A Tutorial on Technologies, Requirements, Challenges, and Solutions. IEEE Commun. Surv. Tutor. 2018, 20, 708–769. [Google Scholar] [CrossRef]
- Hamza, A.S.; Deogun, J.S.; Alexander, D.R. Classification Framework for Free Space Optical Communication Links and Systems. IEEE Commun. Surv. Tutor. 2019, 21, 1346–1382. [Google Scholar] [CrossRef]
- Le, H.D.; Pham, A.T. Link-Layer Retransmission-Based Error-Control Protocols in FSO Communications: A Survey. IEEE Commun. Surv. Tutor. 2022, 24, 1602–1633. [Google Scholar] [CrossRef]
- Aboelala, O.; Lee, I.E.; Chung, G.C. A survey of hybrid free space optics (FSO) communication networks to achieve 5G connectivity for backhauling. Entropy 2022, 24, 1573. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Deng, Y.; Du, A.; Liu, J. Design of a free space optical communication system for an unmanned aerial vehicle command and control link. Photonics 2021, 8, 163. [Google Scholar] [CrossRef]
- Fayad, A.; Cinkler, T.; Rak, J.; Jha, M. Design of cost-efficient optical fronthaul for 5G/6G networks: An optimization perspective. Sensors 2022, 22, 9394. [Google Scholar] [CrossRef]
- Raj, A.A.B.; Krishnan, P.; Darusalam, U.; Kaddoum, G.; Ghassemlooy, Z.; Abadi, M.M.; Majumdar, A.K.; Ijaz, M. A review–unguided optical communications: Developments, technology evolution, and challenges. Electronics 2023, 12, 1922. [Google Scholar] [CrossRef]
- Poliak, J.; Pezzei, P.; Leitgeb, E.; Wilfert, O. Link Budget for High-Speed Short-Distance Wireless Optical Link. In Proceedings of the 8th IEEE International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP), Poznan, Poland, 18–20 July 2012; pp. 1–6. [Google Scholar]
- Ghassemlooy, Z.; Popoola, W.; Rajbhandari, S. Optical Wireless Communications: System and Channel Modelling with Matlab®; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Mishchenko, M.I.; Travis, L.D.; Lacis, A.A. Scattering, Absorption, and Emission of Light by Small Particles; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Chance, K.; Martin, R.V. Spectroscopy and Radiative Transfer of Planetary Atmospheres; Oxford University Press: Oxford, UK, 2017. [Google Scholar]
- Kruse, P.W.; McGlauchlin, L.D.; McQuistan, R.B. Elements of Infrared Technology: Generation, Transmission and Detection; John Wiley and Sons: Hoboken, NJ, USA, 1962. [Google Scholar]
- Kim, I.I.; McArthur, B.; Korevaar, E.J. Comparison of Laser Beam Propagation at 785 nm and 1550 nm in Fog and Haze for Optical Wireless Communications. In Proceedings of the SPIE 4214, Optical Wireless Communications III, Boston, MA, USA, 6 February 2001. [Google Scholar]
- Naboulsi, M.C.A.; Sizun, H.; d. Fornel, F. Fog Attenuation Prediction for Optical and Infrared Waves. Opt. Eng. 2004, 43, 319–329. [Google Scholar] [CrossRef]
- Majumdar, A. Advanced Free Space Optics: A Systems Approach; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef]
- Awan, M.S.; Marzuki; Leitgeb, E.; Hillbrand, B.; Nadeem, F.; Khan, M.S. Cloud Attenuations for Free-Space Optical Links. In Proceedings of the International Workshop on Satellite and Space Communications, Siena, Italy, 9–11 September 2009. [Google Scholar]
- Miers, B.T. Review of Calculations of Extinction for Visible and InfraredWavelengths in Rain. Technical Report, Army Electronics Research and Development Command WSMR NM Atmospheric Science Lab. 1983. Available online: https://apps.dtic.mil/sti/pdfs/ADA132659.pdf (accessed on 5 September 2023).
- Atlas, D. Optical Extinction by Rainfall. Technical report, Air Force Cambridge Research Center. Metrology 1953, 10, 486–488. [Google Scholar]
- ITU-R Recommendations. Prediction Methods Required for the Design of Terrestrial Free-Space Optical Links. Technical Report, ITU 2007, Geneva. 2007. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.1814-0-200708-I!!PDF-E.pdf (accessed on 5 September 2023).
- Near Real-Time Global Precipitation from the Global Precipitation Measurement Constellation. Available online: https://svs.gsfc.nasa.gov/4285 (accessed on 5 September 2023).
- Esposito, S.; Riccardi, A.; Ragazzoni, R. Focus Anisoplanatism Effects on Tip–Tilt Compensation for Adaptive Optics with Use of a Sodium Laser Beacon as a Tracking Reference. J. Opt. Soc. Am. A 1996, 13, 1916–1923. [Google Scholar] [CrossRef]
- Ben-Yosef, N.; Tirosh, E.; Weitz, A.; Pinsky, E. Refractive-Index Structure Constant Dependence on Height. J. Opt. Soc. Am. 1979, 69, 1616–1618. [Google Scholar] [CrossRef]
- Hanada, T.; Fujisaki, K.; Tateiba, M. Bit Error Rate for Satellite Communications in Ka-Band under Atmospheric Turbulence Predicted from Radiosonde Data in Japan. In Proceedings of the International Symposium on Antennas and Propagation (ISAP), Nagoya, Japan, 29 October–2 November 2012; pp. 1445–1448. [Google Scholar]
- Lawrence, J.S.; Ashley, M.C.; Burton, M.G.; Lloyd, J.P.; Storey, J.W. The Unique Antarctic Atmosphere: Implications for Adaptive Optics. In Science with Adaptive Optics; Springer: Berlin/Heidelberg, Germany, 2005; pp. 111–117. [Google Scholar]
- Parikh, J.; Jain, V.K. Study on Statistical Models of Atmospheric Channel for FSO Communication Link. In Proceedings of the Nirma University International Conference on Engineering, Ahmedabad, India, 8–10 December 2011; pp. 1–7. [Google Scholar]
- Karp, S.; Gagliardi, R.M.; Moran, S.E.; Stotts, L.B. Optical Channels: Fibers, Clouds, Water, and the Atmosphere; Springer Science & Business Media, LLC: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Andrews, L.C. Field Guide to Atmospheric Optics; SPIE Field Guides; SPIE Press: Bellingham, WA, USA, 2004. [Google Scholar]
- Andrews, L.C.; Phillips, R.L. Laser Beam Propagation through Random Media, 2nd ed.; SPIE: Bellingham, WA, USA, 2005. [Google Scholar]
- Uysal, M.; Capsoni, C.; Ghassemlooy, Z.; Boucouvalas, A.; Udvary, E. Optical Wireless Communications: An Emerging Technology; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Vetelino, F.; Young, C.; Andrews, L.; Recolons, J. Aperture Averaging Effects on the Probability Density of Irradiance Fluctuations in Moderate-to-Strong Turbulence. Appl. Opt. 2007, 46, 2099–2108. [Google Scholar] [CrossRef]
- Khalighi, M.A.; Aitamer, N.; Schwartz, N.; Bourennane, S. Turbulence Mitigation by Aperture Averaging in Wireless Optical Systems. In Proceedings of the 10th International Conference on Telecommunications, Zagreb, Croatia, 8–10 June 2009; pp. 59–66. [Google Scholar]
- Chahine, Y.K.; Tedder, S.A.; Vyhnalek, B.E.; Wroblewski, A.C. Beam propagation through atmospheric turbulence using an altitude-dependent structure profile with non-uniformly distributed phase screens. In Proceedings of the Free-Space Laser Communications XXXII, San Francisco, CA, USA, 3–4 February 2020; Volume 11272, pp. 263–277. [Google Scholar]
- Jung, K.J.; Nam, S.S.; Alouini, M.S.; Ko, Y.C. Unified Statistical Channel Model of Ship (or Shore)-to-Ship FSO Communications with Pointing Errors. In Proceedings of the IEEE Conference on Standards for Communications and Networking (CSCN), Granada, Spain, 28–30 October 2019; pp. 1–4. [Google Scholar]
- Farid, A.A.; Hranilovic, S. Outage Capacity Optimization for Free-Space Optical Links with Pointing Errors. J. Lightw. Technol. 2007, 25, 1702–1710. [Google Scholar] [CrossRef]
- Elamassie, M.; Uysal, M. FSO-Based Multi-Layer Airborne Backhaul Networks. 2023; Submitted Journal Paper. [Google Scholar]
- Good Aviation Practice (GAP). Available online: https://www.aviation.govt.nz/assets/publications/gaps/helicopter-performance.pdft (accessed on 5 September 2023).
- Lee, J.; Park, K.; Alouini, M.; Ko, Y. Free Space Optical Communication on UAV-Assisted Backhaul Networks: Optimization for Service Time. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Big Island, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Jung, K.J.; Nam, S.S.; Alouini, M.S.; Ko, Y.C. Ergodic Capacity Analysis of UAV-Based FSO Links over Foggy Channels. IEEE Wirel. Commun. Lett. 2022, 11, 1483–1487. [Google Scholar] [CrossRef]
- Ansari, N.; Wu, D.; Sun, X. FSO as Backhaul and Energizer for Drone-Assisted Mobile Access Networks. ICT Express 2020, 6, 139–144. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, K.H.; Ko, Y.C.; Alouini, M.S. A UAV-Mounted Free Space Optical Communication: Trajectory Optimization for Flight Time. IEEE Trans. Wirel. Commun. 2020, 19, 1610–1621. [Google Scholar] [CrossRef]
- Vieira, I.P.; Pita, T.C.; Mello, D.A.A. Modulation and Signal Processing for LEO-LEO Optical Inter-Satellite Links. IEEE Access 2023, 11, 63598–63611. [Google Scholar] [CrossRef]
- Fernandes, M.A.; Loureiro, P.A.; Fernandes, G.M.; Monteiro, P.P.; Guiomar, F.P. Digitally Mitigating Doppler Shift in High-Capacity Coherent FSO LEO-to-Earth Links. J. Light. Technol. 2023, 41, 3993–4001. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable Optical Channel Modeling Between UAVs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Safi, H.; Dargahi, A.; Cheng, J.; Safari, M. Analytical Channel Model and Link Design Optimization for Ground-to-HAP Free-Space Optical Communications. J. Light. Technol. 2020, 38, 5036–5047. [Google Scholar] [CrossRef]
- Zhang, S.; Ansari, N. 3D Drone Base Station Placement and Resource Allocation with FSO-Based Backhaul in Hotspots. IEEE Trans. Veh. Technol. 2020, 69, 3322–3329. [Google Scholar] [CrossRef]
- Gu, Z.; Zhang, J.; Sun, X.; Ji, Y. Optimizing Networked Flying Platform Deployment and Access Point Association in FSO-Based Fronthaul Networks. IEEE Wirel. Commun. Lett. 2020, 9, 1221–1225. [Google Scholar] [CrossRef]
- Najafi, M.; Ajam, H.; Jamali, V.; Diamantoulakis, P.D.; Karagiannidis, G.K.; Schober, R. Statistical Modeling of the FSO Fronthaul Channel for UAV-Based Communications. IEEE Trans. Commun. 2020, 68, 3720–3736. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Rezaee, M.; Ansari, I.S.; Yazdanian, V. Channel Modeling for UAV-Based Optical Wireless Links with Nonzero Boresight Pointing Errors. IEEE Trans. Veh. Technol. 2020, 69, 14238–14246. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Rezaee, M.; Mohammadi, L.; Javaherian, F.; Yazdanian, V.; Hasna, M.O.; Uysal, M. Modulating Retroreflector Based Free Space Optical Link for UAV-to-Ground Communications. IEEE Trans. Wireless Commun. 2022, 21, 8631–8645. [Google Scholar] [CrossRef]
- Fawaz, W.; Abou-Rjeily, C.; Assi, C. UAV-Aided Cooperation for FSO Communication Systems. IEEE Commun. Mag. 2018, 56, 70–75. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. Channel Modeling and Parameter Optimization for Hovering UAV-Based Free-Space Optical Links. IEEE J. Sel. Areas Commun. 2018, 36, 2104–2113. [Google Scholar] [CrossRef]
- Ajam, H.; Najafi, M.; Jamali, V.; Schober, R. Ergodic Sum Rate Analysis of UAV-Based Relay Networks with Mixed RF-FSO Channels. IEEE Open J. Commun. Soc. 2020, 1, 164–178. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Khankalantary, S.; Piran, M.J.; Ansari, I.S.; Uysal, M.; Saad, W.; Hong, C.S. UAV-Assisted Free Space Optical Communication System with Amplify-and-Forward Relaying. IEEE Trans. Veh. Technol. 2021, 70, 8926–8936. [Google Scholar] [CrossRef]
- Elamassie, M.; Uysal, M. Multi-Hop Airborne FSO Systems with Relay Selection Over Outdated Log-Normal Turbulence Channels. 2023; Accepted Journal. [Google Scholar]
- R, S.; Sharma, S.; Vishwakarma, N.; Madhukumar, A.S. HAPS-Based Relaying for Integrated Space–Air–Ground Networks With Hybrid FSO/RF Communication: A Performance Analysis. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1581–1599. [Google Scholar] [CrossRef]
- Li, X.; Li, Y.; Zhao, S.; Tang, H.; Shao, L. Performance analysis of weather-dependent satellite–terrestrial network with rate adaptation hybrid free-space optical and radio frequency link. Int. J. Satell. Commun. Netw. 2023, 41, 357–373. [Google Scholar] [CrossRef]
- Gueye, I.; Dioum, I.; Diop, I.; Keita, K.W.; Ndiaye, P.; Diallo, M.; Farssi, S.M. Performance of hybrid RF/FSO cooperative systems based on quasicyclic LDPC codes and space-coupled LDPC codes. Wirel. Commun. Mob. Comput. 2020, 2020, 8814588. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Le, H.D.; Dang, N.T.; Pham, A.T. On the Design of Rate Adaptation for Relay-Assisted Satellite Hybrid FSO/RF Systems. IEEE Photonics J. 2022, 14, 7304211. [Google Scholar] [CrossRef]
- Khallaf, H.S.; Kato, K.; Mohamed, E.M.; Sait, S.M.; Yanikomeroglu, H.; Uysal, M. Composite Fading Model for Aerial MIMO FSO Links in the Presence of Atmospheric Turbulence and Pointing Errors. IEEE Wireless Commun. Lett. 2021, 10, 1295–1299. [Google Scholar] [CrossRef]
- Kim, S.J.; Han, S.K. Efficient MIMO Configuration for Bi-Directional Vertical FSO Link with Multiple Beam Induced Pointing Error. Sensors 2022, 22, 9147. [Google Scholar] [CrossRef]
- Kapsis, T.T.; Panagopoulos, A.D. Optimum power allocation based on channel conditions in optical satellite downlinks. Wirel. Pers. Commun. 2021, 116, 2997–3013. [Google Scholar] [CrossRef]
- Arum, S.C.; Grace, D.; Mitchell, P.D.; Zakaria, M.D.; Morozs, N. Energy Management of Solar-Powered Aircraft-Based High-Altitude Platform for Wireless Communications. Electronics 2020, 9, 179. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Alshanbari, R.; Hussain, M.M. Solar Powered Small Unmanned Aerial Vehicles: A Review. Energy Technol. 2021, 9, 2100587. [Google Scholar] [CrossRef]
- Wei, X.; Yi, Z.; Li, W.; Zhao, L.; Zhang, W. Energy Harvesting Fueling the Revival of Self-Powered Unmanned Aerial Vehicles. Energy Convers. Manag. 2023, 283, 116863. [Google Scholar] [CrossRef]
- Shibata, Y.; Kanazawa, N.; Konishi, M.; Hoshino, K.; Ohta, Y.; Nagate, A. System Design of Gigabit HAPS Mobile Communications. IEEE Access 2020, 8, 157995–158007. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, Applications, and Design Challenges of Drones: A Review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Mason, R. Feasibility of Laser Power Transmission to a High-Altitude Unmanned Aerial Vehicle; RAND: Santa Monica, CA, USA, 2011. [Google Scholar]
- TP, P.A.; Pandiarajan, R.; Raju, P. Wireless Power Transmission to UAV Using Laser Beaming. Int. J. Mech. Eng. Res. 2015, 5, 137–142. [Google Scholar]
- Javed, S.; Alouini, M.S.; Ding, Z. An Interdisciplinary Approach to Optimal Communication and Flight Operation of High-Altitude Long-Endurance Platforms. IEEE Trans. Aerosp. Electron. Syst. 2023, 2023, 1–14. [Google Scholar] [CrossRef]
- Gong, Y.; Yao, H.; Xiong, Z.; Guo, S.; Yu, F.R.; Niyato, D. Computation Offloading and Energy Harvesting Schemes for Sum Rate Maximization in Space-Air-Ground Networks. In Proceedings of the IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 3941–3946. [Google Scholar]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Region Characterization. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy Efficient UAV Communication with Energy Harvesting. IEEE Trans. Veh. Technol. 2020, 69, 1913–1927. [Google Scholar] [CrossRef]
- Xie, L.; Xu, J.; Zhang, R. Throughput Maximization for UAV Enabled Wireless Powered Communication Networks. IEEE Internet Things J. 2019, 6, 1690–1703. [Google Scholar] [CrossRef]
- Xie, L.; Xu, J.; Zeng, Y. Common Throughput Maximization for UAV-Enabled Interference Channel with Wireless Powered Communications. IEEE Trans. Commun. 2020, 68, 3197–3212. [Google Scholar] [CrossRef]
- Tang, J.; Song, J.; Ou, J.; Luo, J.; Zhang, X.; Wong, K.K. Minimum Throughput Maximization for Multi-UAV Enabled WPCN: A Deep Reinforcement Learning Method. IEEE Access 2020, 8, 9124–9132. [Google Scholar] [CrossRef]
- Huang, F.; Chen, J.; Wang, H.; Ding, G.; Xue, Z.; Yang, Y.; Song, F. UAV-Assisted SWIPT in Internet of Things with Power Splitting: Trajectory Design and Power Allocation. IEEE Access 2019, 7, 68260–68270. [Google Scholar] [CrossRef]
- Kang, J.M.; Chun, C.J. Joint Trajectory Design, Tx Power Allocation, and Rx Power Splitting for UAV-Enabled Multicasting SWIPT Systems. IEEE Syst. J. 2020, 14, 3740–3743. [Google Scholar] [CrossRef]
- Feng, W.; Tang, J.; Yu, Y.; Song, J.; Zhao, N.; Chen, G.; Wong, K.K.; Chambers, J. UAV-Enabled SWIPT in IoT Networks for Emergency Communications. IEEE Wirel. Commun. 2020, 27, 140–147. [Google Scholar] [CrossRef]
- Renzo, M.D.; Debbah, M.; Phan-Huy, D.T.; Zappone, A.; Alouini, M.S.; Yuen, C.; Sciancalepore, V.; Alexandropoulos, G.C.; Hoydis, J.; Gacanin, H.; et al. Smart Radio Environments Empowered by Reconfigurable AI Metasurfaces: An Idea Whose Time Has Come. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 129. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.C. Toward Smart Wireless Communications via Intelligent Reflecting Surfaces: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Zheng, B.; You, C.; Mei, W.; Zhang, R. A Survey on Channel Estimation and Practical Passive Beamforming Design for Intelligent Reflecting Surface Aided Wireless Communications. IEEE Commun. Surv. Tutor. 2022, 24, 1035–1071. [Google Scholar] [CrossRef]
- Ndjiongue, A.R.; Ngatched, T.M.N.; Dobre, O.A.; Armada, A.G.; Haas, H. Analysis of RIS-Based Terrestrial-FSO Link Over G-G Turbulence with Distance and Jitter Ratios. J. Light. Technol. 2021, 39, 6746–6758. [Google Scholar] [CrossRef]
- Agheli, P.; Beyranvand, H.; Emadi, M.J. High-Speed Trains Access Connectivity Through RIS-Assisted FSO Communications. J. Light. Technol. 2022, 40, 7084–7094. [Google Scholar] [CrossRef]
- Han, L.; Liu, X.; Wang, Y.; Hao, X. Analysis of RIS-Assisted FSO Systems Over F Turbulence Channel With Pointing Errors and Imperfect CSI. IEEE Wirel. Commun. Lett. 2022, 11, 1940–1944. [Google Scholar] [CrossRef]
- Chapala, V.K.; Zafaruddin, S.M. Unified Performance Analysis of Reconfigurable Intelligent Surface Empowered Free-Space Optical Communications. IEEE Trans. Commun. 2022, 70, 2575–2592. [Google Scholar] [CrossRef]
- Aboagye, S.; Ndjiongue, A.R.; Ngatched, T.M.N.; Dobre, O.A.; Poor, H.V. RIS-Assisted Visible Light Communication Systems: A Tutorial. IEEE Commun. Surv. Tutor. 2023, 25, 251–288. [Google Scholar] [CrossRef]
- Vishwakarma, N.; Swaminathan, R.; Diamantoulakis, P.D.; Karagiannidis, G.K. Performance Analysis of Optical Reflecting Surface-Assisted Optical Space Shift Keying-Based MIMO-FSO System. IEEE Trans. Commun. 2023, 71, 4751–4763. [Google Scholar] [CrossRef]
- Jian, Y.H.; Wang, C.C.; Chow, C.W.; Gunawan, W.H.; Wei, T.C.; Liu, Y.; Yeh, C.H. Optical Beam Steerable Orthogonal Frequency Division Multiplexing (OFDM) Non-Orthogonal Multiple Access (NOMA) Visible Light Communication Using Spatial-Light Modulator Based Reconfigurable Intelligent Surface. IEEE Photonics J. 2023, 15, 1–8. [Google Scholar] [CrossRef]
- Igboamalu, F.N.; Ndjiongue, A.R.; Ouahada, K. Capacity Analysis of an MISO Free-Space Optical Communications Assisted by Concave ORIS. J. Commun. Inf. Netw. 2023, 8, 295–302. [Google Scholar] [CrossRef]
- Souto, V.D.P.; Souza, R.D.; Uchôa-Filho, B.F.; Li, A.; Li, Y. Beamforming Optimization for Intelligent Reflecting Surfaces without CSI. IEEE Wirel. Commun. Lett. 2020, 9, 1476–1480. [Google Scholar] [CrossRef]
- Qiao, J.; Alouini, M.S. Secure Transmission for Intelligent Reflecting Surface-Assisted mmWave and Terahertz Systems. IEEE Wirel. Commun. Lett. 2020, 9, 1743–1747. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.C.; Xiao, S. Intelligent Reflecting Surface Configuration with Historical Channel Observations. IEEE Wirel. Commun. Lett. 2020, 9, 1821–1824. [Google Scholar] [CrossRef]
- Dong, L.; Wang, H.M.; Bai, J.; Xiao, H. Double Intelligent Reflecting Surface for Secure Transmission with Inter-Surface Signal Reflection. IEEE Trans. Veh. Technol. 2021, 70, 2912–2916. [Google Scholar] [CrossRef]
- Hu, X.; Jin, L.; Huang, K.; Sun, X.; Zhou, Y.; Qu, J. Intelligent Reflecting Surface-Assisted Secret Key Generation with Discrete Phase Shifts in Static Environment. IEEE Wirel. Commun. Lett. 2021, 10, 1867–1870. [Google Scholar] [CrossRef]
- Woo, J.; Song, C.; Lee, I. Sum Rate and Fairness Optimization for Intelligent Reflecting Surface Aided Multiuser Systems. IEEE Trans. Veh. Technol. 2021, 70, 13436–13440. [Google Scholar] [CrossRef]
- Sirojuddin, A.; Putra, D.D.; Huang, W.J. Low-Complexity Sum-Capacity Maximization for Intelligent Reflecting Surface-Aided MIMO Systems. IEEE Wirel. Commun. Lett. 2022, 11, 1354–1358. [Google Scholar] [CrossRef]
- Hashida, H.; Kawamoto, Y.; Kato, N. Intelligent Reflecting Surface Placement Optimization in Air-Ground Communication Networks Toward 6G. IEEE Wirel. Commun. 2020, 27, 146–151. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Q.; Yang, K. Energy Self-Sustainability in Full-Spectrum 6G. IEEE Wirel. Commun. 2021, 28, 104–111. [Google Scholar] [CrossRef]
- Deng, R.; Di, B.; Zhang, H.; Poor, H.V.; Song, L. Holographic MIMO for LEO Satellite Communications Aided by Reconfigurable Holographic Surfaces. IEEE J. Sel. Areas Commun. 2022, 40, 3071–3085. [Google Scholar] [CrossRef]
- Badarneh, O.S.; Awad, M.K.; Muhaidat, S.; Almehmadi, F.S. Performance Analysis of Intelligent Reflecting Surface-Aided Decode-and-Forward UAV Communication Systems. IEEE Syst. J. 2023, 17, 246–257. [Google Scholar] [CrossRef]
- Shnaiwer, Y.N.; Kaneko, M. Minimizing IoT Energy Consumption by IRS-Aided UAV Mobile Edge Computing. IEEE Netw. Lett. 2023, 5, 16–20. [Google Scholar] [CrossRef]
- Zhao, B.; Lin, M.; Cheng, M.; Wang, J.B.; Cheng, J.; Alouini, M.S. Robust Downlink Transmission Design in IRS-Assisted Cognitive Satellite and Terrestrial Networks. IEEE J. Sel. Areas Commun. 2023, 41, 2514–2529. [Google Scholar] [CrossRef]
- Malik, S.; Saxena, P.; Chung, Y.H. Performance Analysis of a UAV-Based IRS-Assisted Hybrid RF/FSO Link with Pointing and Phase Shift Errors. J. Opt. Commun. Netw. 2022, 14, 303–315. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Le, H.D.; Pham, A.T. On the Design of RIS–UAV Relay-Assisted Hybrid FSO/RF Satellite–Aerial–Ground Integrated Network. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 757–771. [Google Scholar] [CrossRef]
- Saxena, P.; Chung, Y.H. Analysis of Jamming Effects in IRS Assisted UAV Dual-Hop FSO Communication Systems. IEEE Trans. Veh. Technol. 2023, 72, 8956–8971. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; Wei, Z.; Yu, K.; Min, L.; Mumtaz, S. Uplink Secrecy Performance of RIS-Based RF/FSO Three-Dimension Heterogeneous Networks. IEEE Trans. Wirel. Commun. 2023, 2023, 1. [Google Scholar] [CrossRef]
- Wang, S.; Yang, L.; Li, X.; Quo, K.; Liu, H.; Song, H.; Jhaveri, R.H. Performance Analysis of Satellite-Vehicle Networks with a Non-Terrestrial Vehicle. IEEE Trans. Intell. Veh. 2023, 2023, 1–10. [Google Scholar] [CrossRef]
- Allen, L.; Beijersbergen, M.W.; Spreeuw, R.J.C.; Woerdman, J.P. Orbital Angular Momentum of Light and the Transformation of Laguerre–Gaussian Laser Modes. Phys. Rev. A 1992, 45, 8185. [Google Scholar] [CrossRef]
- Li, S.; Wang, J. Multi-Orbital-Angular-Momentum Multi-Ring Fiber for High-Density Space-Division Multiplexing. IEEE Photonics J. 2013, 5, 7101007. [Google Scholar] [CrossRef]
- Willner, A.E.; Huang, H.; Yan, Y.; Ren, Y.; Ahmed, N.; Xie, G.; Bao, C.; Li, L.; Cao, Y.; Zhao, Z.; et al. Optical Communications Using Orbital Angular Momentum Beams. Adv. Opt. Photon. 2015, 7, 66–106. [Google Scholar] [CrossRef]
- Deng, D.; Li, Y.; Zhao, H.; Han, Y.; Ye, J.; Qu, S. High-Capacity Spatial-Division Multiplexing with Orbital Angular Momentum Based on Multi-Ring Fiber. J. Opt. 2019, 21, 055601. [Google Scholar] [CrossRef]
- Trichili, A.; Park, K.H.; Zghal, M.; Ooi, B.S.; Alouini, M.S. Communicating Using Spatial Mode Multiplexing: Potentials, Challenges, and Perspectives. IEEE Commun. Surv. Tutor. 2019, 21, 3175–3203. [Google Scholar] [CrossRef]
- Amhoud, E.M.; Trichili, A.; Ooi, B.S.; Alouini, M.S. OAM Mode Selection and Space–Time Coding for Atmospheric Turbulence Mitigation in FSO Communication. IEEE Access 2019, 7, 88049–88057. [Google Scholar] [CrossRef]
- Li, S.; Li, X.; Zhang, L.; Wang, G.; Zhang, L.; Liu, M.; Zeng, C.; Wang, L.; Sun, Q.; Zhao, W.; et al. Efficient Optical Angular Momentum Manipulation for Compact Multiplexing and Demultiplexing Using a Dielectric Metasurface. Adv. Opt. Mater. 2020, 8, 1901666. [Google Scholar] [CrossRef]
- Olaleye, T.M.; Ribeiro, P.A.; Raposo, M. Generation of Photon Orbital Angular Momentum and Its Application in Space Division Multiplexing. Photonics 2023, 10, 664. [Google Scholar] [CrossRef]
- Wei, S.; Wang, D.; Lin, J.; Yuan, X. Demonstration of Orbital Angular Momentum Channel Healing Using a Fabry-Pérot Cavity. Opto-Electron. Adv. 2018, 1, 180006. [Google Scholar] [CrossRef]
- Yin, X.; Chen, X.; Chang, H.; Cui, X.; Su, Y.; Guo, Y.; Wang, Y.; Xin, X. Experimental Study of Atmospheric Turbulence Detection Using an Orbital Angular Momentum Beam via a Convolutional Neural Network. IEEE Access 2019, 7, 184235–184241. [Google Scholar] [CrossRef]
- Amhoud, E.M.; Ooi, B.S.; Alouini, M.S. A Unified Statistical Model for Atmospheric Turbulence-Induced Fading in Orbital Angular Momentum Multiplexed FSO Systems. IEEE Trans. Wirel. Commun. 2020, 19, 888–900. [Google Scholar] [CrossRef]
- Cui, B.; Cai, S.; Zhang, Z. Relaying System Based on Few-Mode EDFA for Space Division Multiplexing Wireless Optical Communication. IEEE Photonics J. 2022, 14, 7343207. [Google Scholar] [CrossRef]
- Anguita, J.A.; Neifeld, M.A.; Vasic, B.V. Turbulence-Induced Channel Crosstalk in an Orbital Angular Momentum-Multiplexed Free-Space Optical Link. Appl. Opt. 2008, 47, 2414–2429. [Google Scholar] [CrossRef]
- Ren, Y.; Xie, G.; Huang, H.; Ahmed, N.; Yan, Y.; Li, L.; Bao, C.; Lavery, M.P.; Tur, M.; Neifeld, M.A.; et al. Adaptive-Optics-Based Simultaneous Pre- and Post-Turbulence Compensation of Multiple Orbital-Angular-Momentum Beams in a Bidirectional Free-Space Optical Link. Optica 2014, 1, 376–382. [Google Scholar] [CrossRef]
- Li, M.; Cvijetic, M.; Takashima, Y.; Yu, Z. Evaluation of Channel Capacities of OAM-Based FSO Link with Real-Time Wavefront Correction by Adaptive Optics. Opt. Express 2014, 22, 31337–31346. [Google Scholar] [CrossRef]
- Xie, G.; Li, L.; Ren, Y.; Huang, H.; Yan, Y.; Ahmed, N.; Zhao, Z.; Lavery, M.P.; Ashrafi, N.; Ashrafi, S.; et al. Performance Metrics and Design Considerations for a Free Space Optical Orbital-Angular-Momentum Multiplexed Communication Link. Optica 2015, 2, 357–365. [Google Scholar] [CrossRef]
- Li, L.; Zhang, R.; Zhao, Z.; Xie, G.; Liao, P.; Pang, K.; Song, H.; Liu, C.; Ren, Y.; Labroille, G.; et al. High-Capacity Free-Space Optical Communications Between a Ground Transmitter and a Ground Receiver via a UAV Using Multiplexing of Multiple Orbital-Angular-Momentum Beams. Sci. Rep. 2017, 7, 17427. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wan, C.; Zhan, Q. Engineering photonic angular momentum with structured light: A review. Adv. Photonics 2021, 3, 064001. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Li, S.; Zhao, Y.; Du, J.; Zhu, L. Orbital angular momentum and beyond in free-space optical communications. Nanophotonics 2021, 11, 645–680. [Google Scholar] [CrossRef]
- Khalid, H.; Hashim, S.J.; Hashim, F.; Ahamed, S.M.S.; Chaudhary, M.A.; Altarturi, H.H.M.; Saadoon, M. HOOPOE: High Performance and Efficient Anonymous Handover Authentication Protocol for Flying Out of Zone UAVs. IEEE Trans. Veh. Technol. 2023, 72, 10906–10920. [Google Scholar] [CrossRef]
- Liu, Y.; Yuan, X.; Xiong, Z.; Kang, J.; Wang, X.; Niyato, D. Federated Learning for 6G Communications: Challenges, Methods, and Future Directions. China Commun. 2020, 17, 105–118. [Google Scholar] [CrossRef]
- Huang, C.; He, R.; Ai, B.; Molisch, A.F.; Lau, B.K.; Haneda, K.; Liu, B.; Wang, C.X.; Yang, M.; Oestges, C.; et al. Artificial Intelligence Enabled Radio Propagation for Communications—Part II: Scenario Identification and Channel Modeling. IEEE Trans. Antennas Propag. 2022, 70, 3955–3969. [Google Scholar] [CrossRef]
- Koudouridis, G.P.; He, Q.; Dán, G. An Architecture and Performance Evaluation Framework for Artificial Intelligence Solutions in Beyond 5G Radio Access Networks. EURASIP J. Wirel. Commun. Netw. 2022, 2022, 1–32. [Google Scholar] [CrossRef]
- Zia, K.; Chiumento, A.; Havinga, P.J.M. AI-Enabled Reliable QoS in Multi-RAT Wireless IoT Networks: Prospects, Challenges, and Future Directions. IEEE Open J. Commun. Soc. 2022, 3, 1906–1929. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node Type | Altitude Range | Description | |
|---|---|---|---|
| GEO |  | Outer Space (36,000 km) | GEO satellites orbit the Earth at an altitude of 35,786 km above the equator [16]. Their orbit matches the Earth’s rotation, resulting in a synchronized orbit. Therefore, they remain fixed relative to a specific location on the Earth’s surface, appearing stationary in the sky. |
| MEO | Outer Space (2000 km to GEO altitude) | While a GEO has a fixed altitude of 35,786 km, MEO satellites can be found at various altitudes within the range from 2000 km to the altitude of a GEO, based on their specific mission and requirements [16]. Most MEO satellites are found at altitudes between 8000 and 20,000 km. The key advantage of placing satellites in MEO is balancing the coverage area and signal delay. | |
| LEO | Outer Space (up to 2000 km) | The altitude of LEO satellites is up to 2000 km above the Earth’s surface [16]. Due to their operational altitude being closer to the Earth, LEO satellites circle the Earth more frequently than satellites in higher orbits. LEO satellites have the advantage of proximity to Earth, enabling rapid data transmission. However, this proximity also means they offer more limited coverage of a specific area compared to satellites in other orbits. | |
| Aerostatic HAPS (balloons, airship) |  | Stratosphere (17–22 km) | Aerostatic HAPSs are lighter-than-air vehicles and take the form of balloons and airships [17]. These make use of a lifting gas (e.g., helium, hydrogen) less dense than the surrounding air to remain airborne. Balloons are characterized by their compact size, lightweight construction, and affordability. Functioning as wind-powered platforms, they utilize wind patterns to determine their path and altitude. Unlike balloons, airships are equipped with a propulsion system for more precise navigation and positioning. Their payload capacity is also much higher. Airships were most commonly used before the 1940s. New generations of solar-powered high-altitude airships have recently been developed. |
| Aerodynamic HAPS |  | Stratosphere (17–22 km) | Aerodynamic HAPSs are heavier than air [17] and rely on the principles of aerodynamics to generate the lift forces necessary for sustained flight. The most common form of aerodynamic HAPS is a fixed-wing aircraft, typically powered by solar panels attached to its wings. |
| Rotary-wing UAV |  | Troposphere (from a few hundred meters up to few kms above the ground) | Rotary-wing UAVs have the capability for hovering and maintaining a semi-steady fixed position. These UAVs have the advantages of vertical takeoff, hovering, and maneuverability. |
| Fixed-wing UAV |  | Troposphere (<17 km) | Fixed-wing UAVs have longer endurance and greater range than rotary-wing UAVs, making them ideal for applications requiring extended flight times and a larger area coverage [18]. They offer stability during level flight and the ability to carry significant payloads compared to rotary-wing UAV’s, such as high-resolution cameras, scientific instruments, and sensors. |
| Technology | GEO | MEO | LEO | HAPS | UAVs |
|---|---|---|---|---|---|
| Altitude | ≈ 35,786 km [60] | ≥2000 km [60] | ≈160–2000 km [60] | ≈17–22 km | ≤17 km |
| Latency | 600–800 ms [61] | 125–250 ms [61] | 30–50 ms [61] | ≤30 ms | ≤30 ms |
| Coverage | Global/Very Large | Global/Very Large | Global/Very Large | Regional/Large | Local |
| Number of Required Nodes |
|
|
|
|
|
| Applications | Broadcasting, Weather monitoring, Communication, GPS | Navigation, Weather forecasting, GPS, and Communication | Earth observation, Remote sensing, GPS, Communication, and Astronomy | Communication, Surveillance, and Monitoring | Surveillance, Monitoring, and wireless access. |
| Advantages |
|
|
|
|
|
| Disadvantages |
|
|
|
|
|
| Flexibility | None | Limited | Limited | High | High |
| General Payload Capacity | High | Moderate | Limited | Limited | Limited |
| Endurance | Years | Years | Years | Several weeks/months | Several hours to Days |
| Comparison Factors | RF | Optical |
|---|---|---|
| Bandwidth | Hundreds of MHz to several GHz [63]. | Tens of GHz per wavelength. |
| Interference | Prone to interference from electromagnetic waves. | Immune to RF interference. |
| Regulatory Requirements | Requires licenses and compliance with regulatory guidelines. | Operates in the unregulated optical spectrum, eliminating the need for spectrum licenses and reducing regulatory constraints. |
| Multipath Interference | Subject to multipath interference due to reflections, diffractions, and scattering. | Highly directional laser beam, resulting in better signal integrity and reliability. |
| Movement-Induced Issues | Less susceptible to pointing errors and movement-induced issues. | Highly susceptible to pointing errors, which can impact signal stability, especially in adverse weather conditions or moving platforms. |
| Security | Vulnerable to eavesdropping and interception. | It offers higher security with narrower beams that are difficult to intercept. |
| Latency | Both RF and optical signals propagate through the Earth’s atmosphere at nearly the same speed, close to the speed of light in a vacuum [64]. | |
| Installation Complexity | Relatively simpler installation. | Installation may be complex, requiring precise alignment and considerations for weather conditions. |
| Cost | Often lower initial setup costs. | May have higher initial setup costs due to specialized equipment, alignment requirements, and tracking systems. |
| Scalability | Easily scalable with additional equipment. | Scalability may be limited by atmospheric conditions and LoS requirements. |
| Data Rate | Typically, lower data rates compared to optical. | Offers higher data rates, especially for point-to-point communication. |
| Reliability | RF technology can be reliable in various environmental conditions. | Weather conditions, such as fog or rain, can affect reliability, leading to signal degradation. |
| Models | Wavelength | Visibility |
|---|---|---|
| Kruse Model | 785 and 1550 | 0 m to more than 50 km |
| Kim Model | 785 and 1550 | 0 m to more than 50 km |
| Al-Naboulsi | 400- to 1500 | 50 m to 1000 m |
| Model Name | k | |
|---|---|---|
| Japan | 1.58 | 0.63 |
| France | 1.076 | 0.67 |
| Widespread rain | 0.25 | 0.63 |
| Orographic rain/drizzle | 1.20 | 0.33 |
| HAPS-Ground Links | UAV-Ground Links | |
|---|---|---|
| Factors/Reasons |
|
|
| Mitigation techniques |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elamassie, M.; Uysal, M. Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks. Photonics 2023, 10, 1210. https://doi.org/10.3390/photonics10111210
Elamassie M, Uysal M. Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks. Photonics. 2023; 10(11):1210. https://doi.org/10.3390/photonics10111210
Chicago/Turabian StyleElamassie, Mohammed, and Murat Uysal. 2023. "Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks" Photonics 10, no. 11: 1210. https://doi.org/10.3390/photonics10111210
APA StyleElamassie, M., & Uysal, M. (2023). Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks. Photonics, 10(11), 1210. https://doi.org/10.3390/photonics10111210