Hybrid Positioning Algorithm for Tilted Receiver Using RSS and TDOA with Gaussian Process



Abstract
:1. Introduction
- We propose a hybrid RSS–TDOA positioning algorithm for the tilted receiver. The scheme uses RSS and TDOA, respectively, in the GP model to estimate the position of the receiver. Then, according to the proposed positioning selection strategy, the more credible estimated position in the two algorithms is selected as the final estimated position of the receiver. In addition, RSS information in the hybrid algorithm is extracted from TDOA signals, which prevents the hybrid algorithm from increasing the complexity of the system compared with using two data acquisition modules to obtain different information.
- We introduce the GP algorithm to reduce the amount of samples in the training set for the ML model. Compared with other ML algorithms, the GP algorithm has better performance with a small training set. The GP model can provide us with the distribution information of the estimated target which is used in the positioning selection strategy. In addition, we derive the modified channel gain formula when the receiver is tilted. For the case in which the tilted angle is known, the received signal strength at a certain point in space can be calculated by the modified formula, which helps us to construct the test set to evaluate the hybrid algorithm. Finally, a normalization method of GP is used to prevent accuracy degradation caused by the data imbalance.
2. Principle
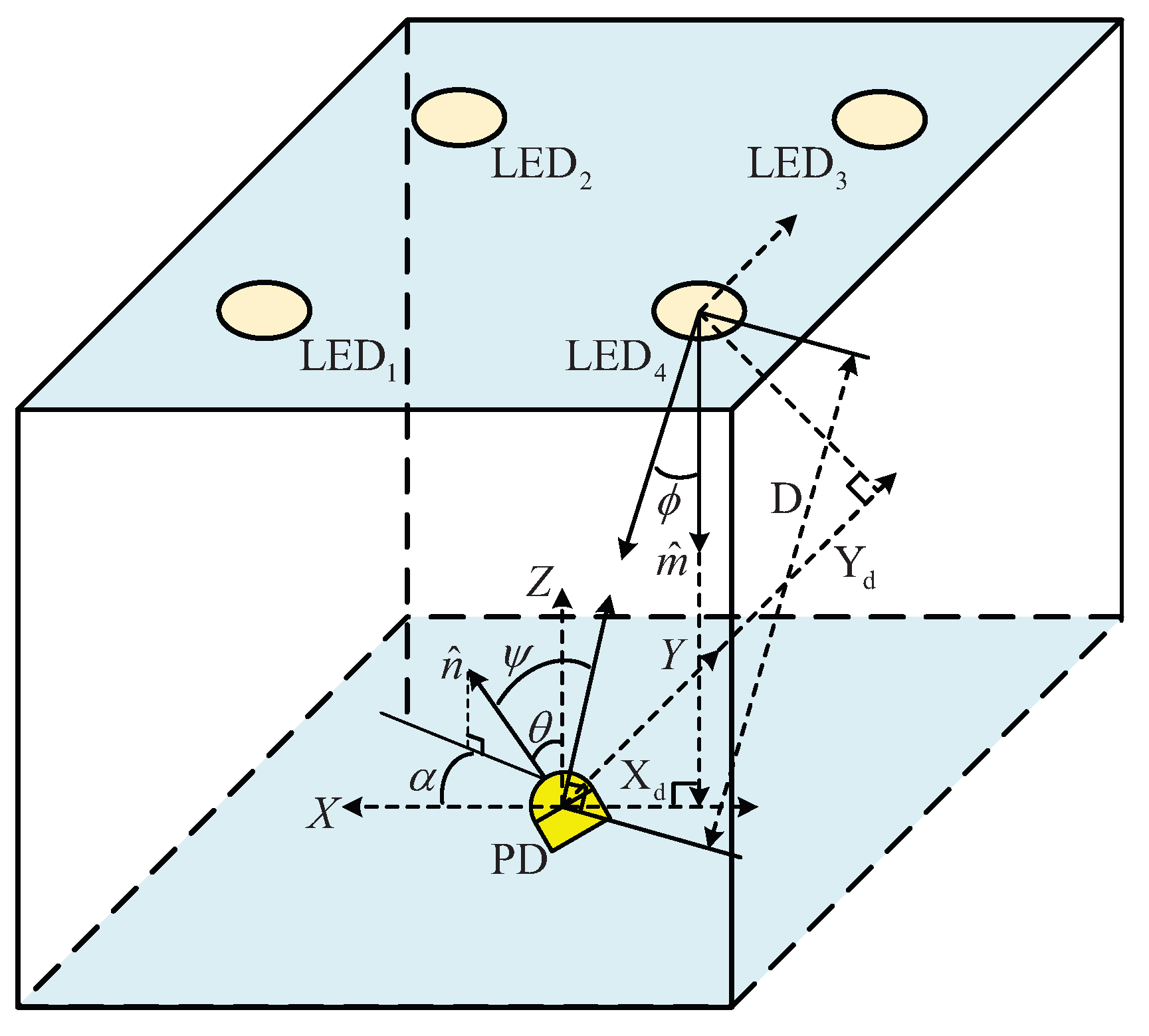
2.1. System Model
2.2. Gaussian Process
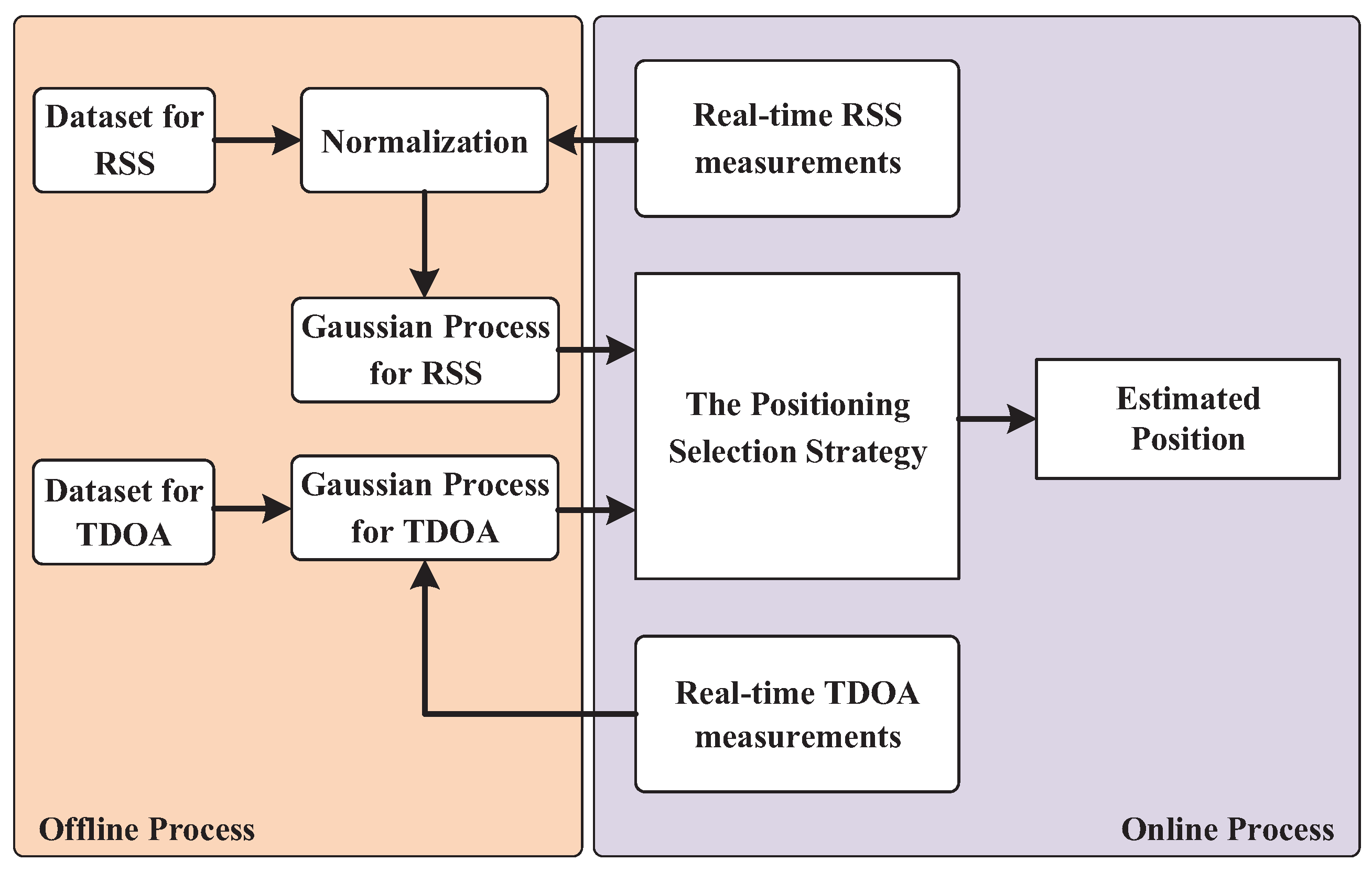
2.3. The Positioning Selection Strategy
2.4. Normalization of Gaussian Process
3. Hybrid RSS–TDOA Positioning Algorithm
4. Simulation
4.1. Simulation Setup
4.2. Simulation Results and Discussions
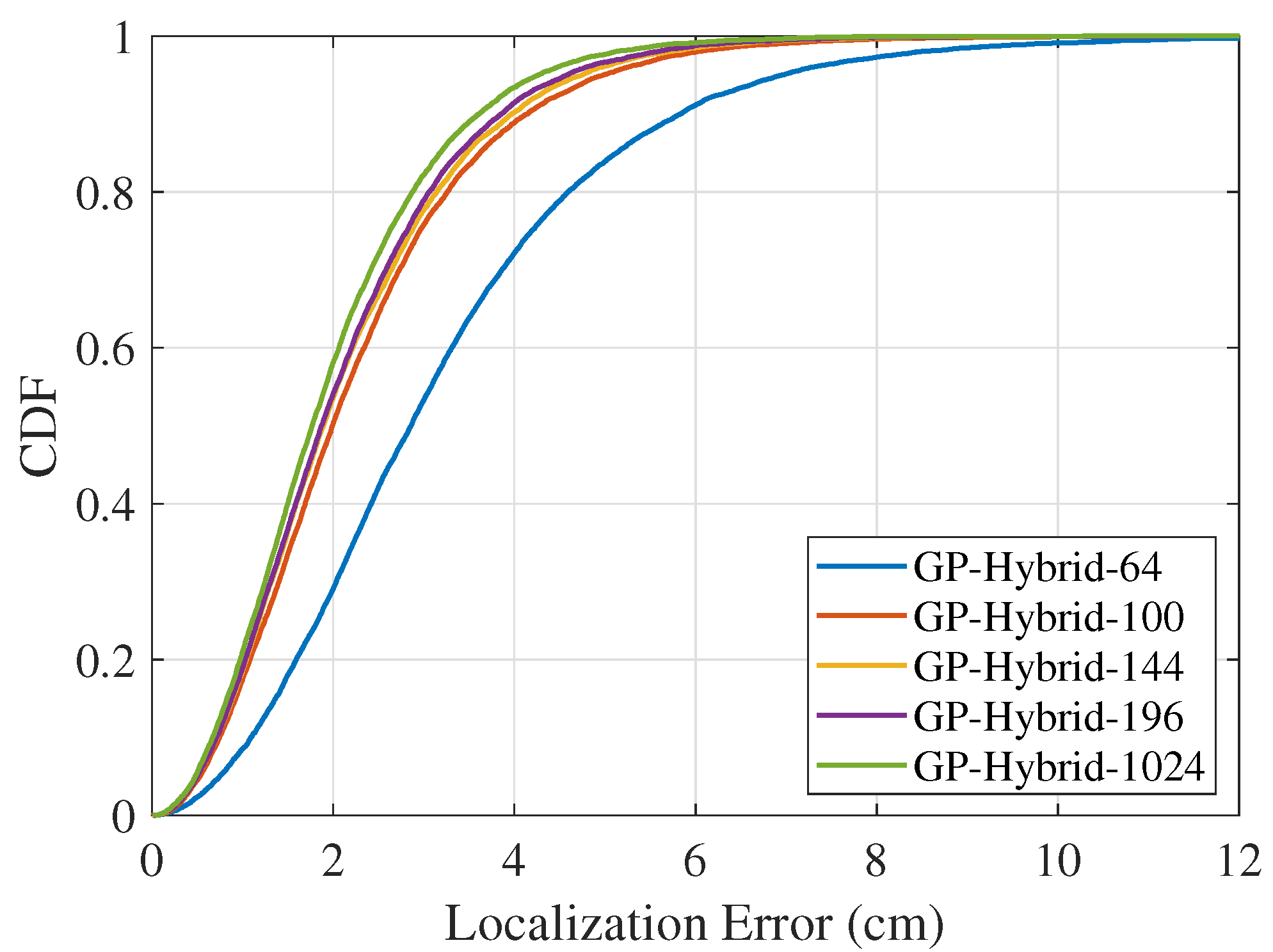
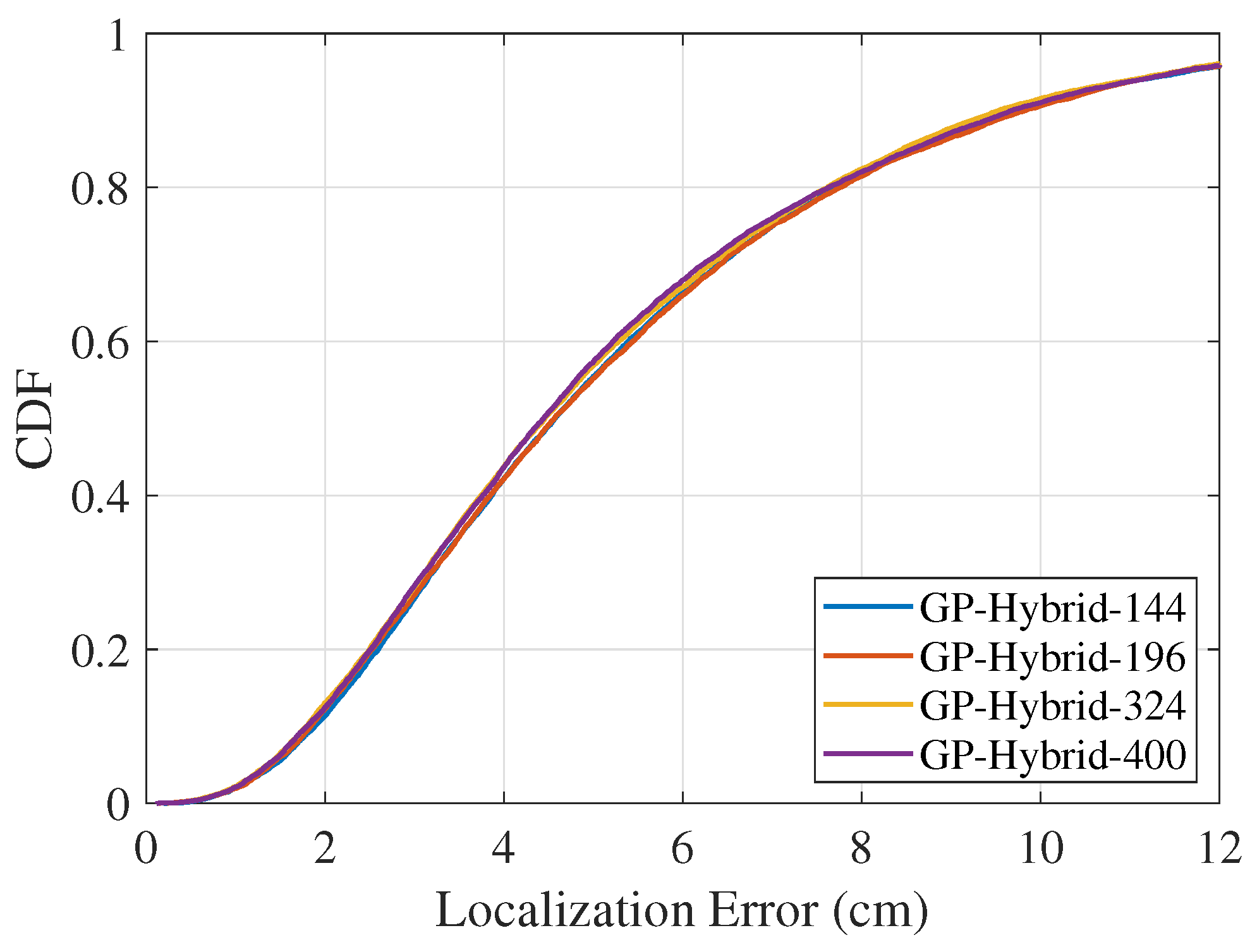
4.2.1. Effect of Training Set Size on Positioning Performance
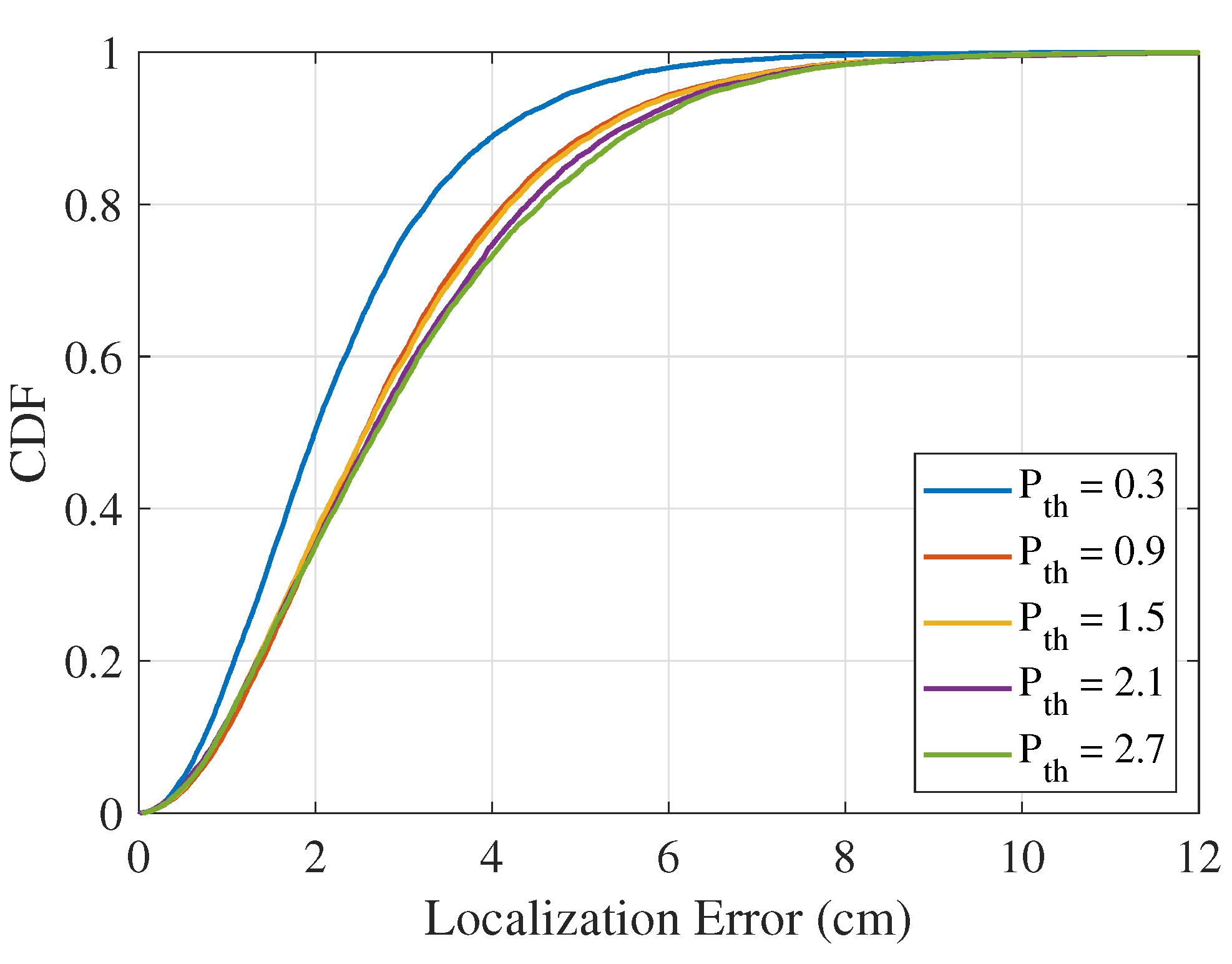
4.2.2. Effect of Decision Threshold on Positioning Performance
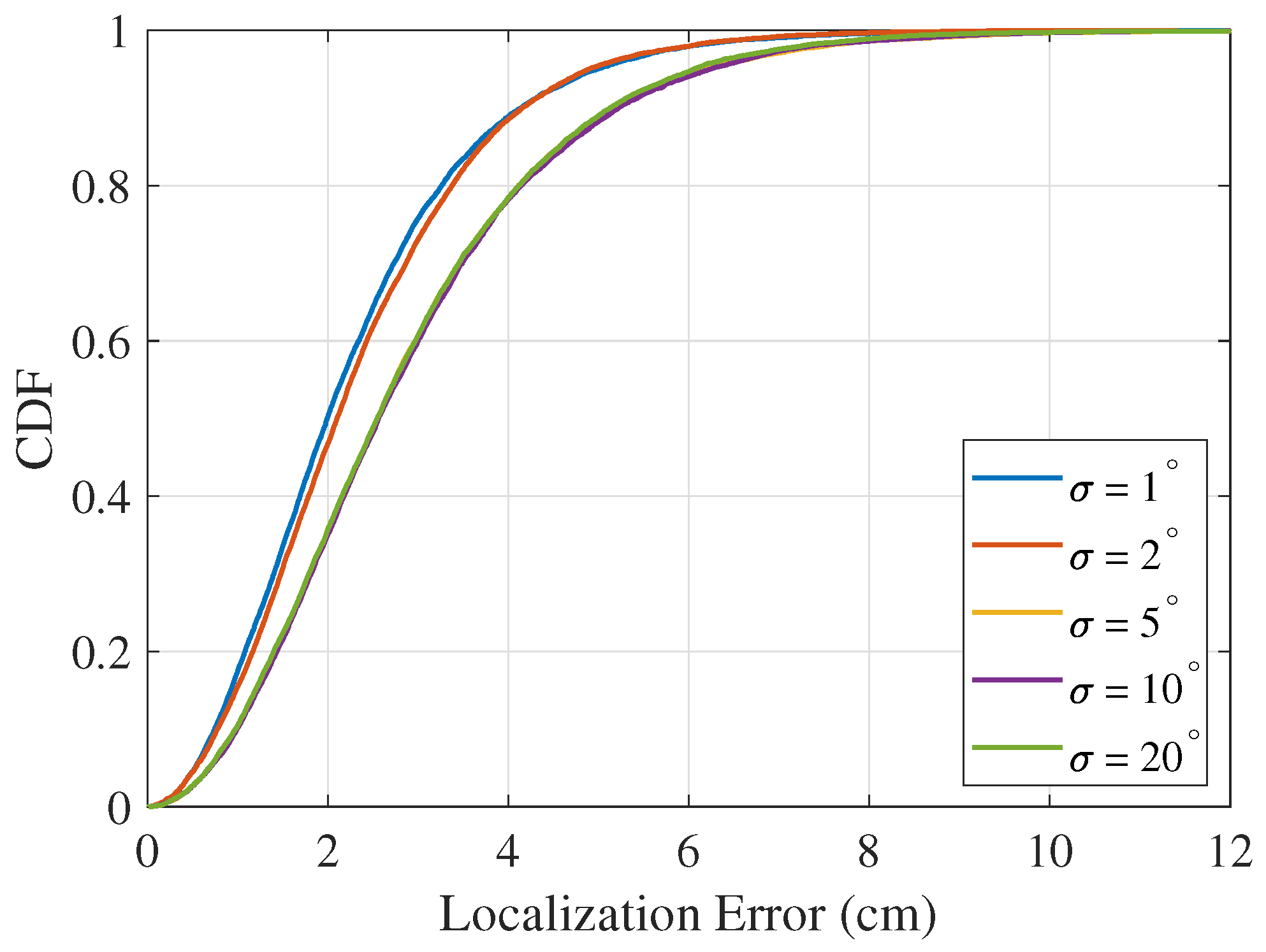
4.2.3. Effect of Standard Variance of Receiver’s Tilted Angle on Positioning Performance
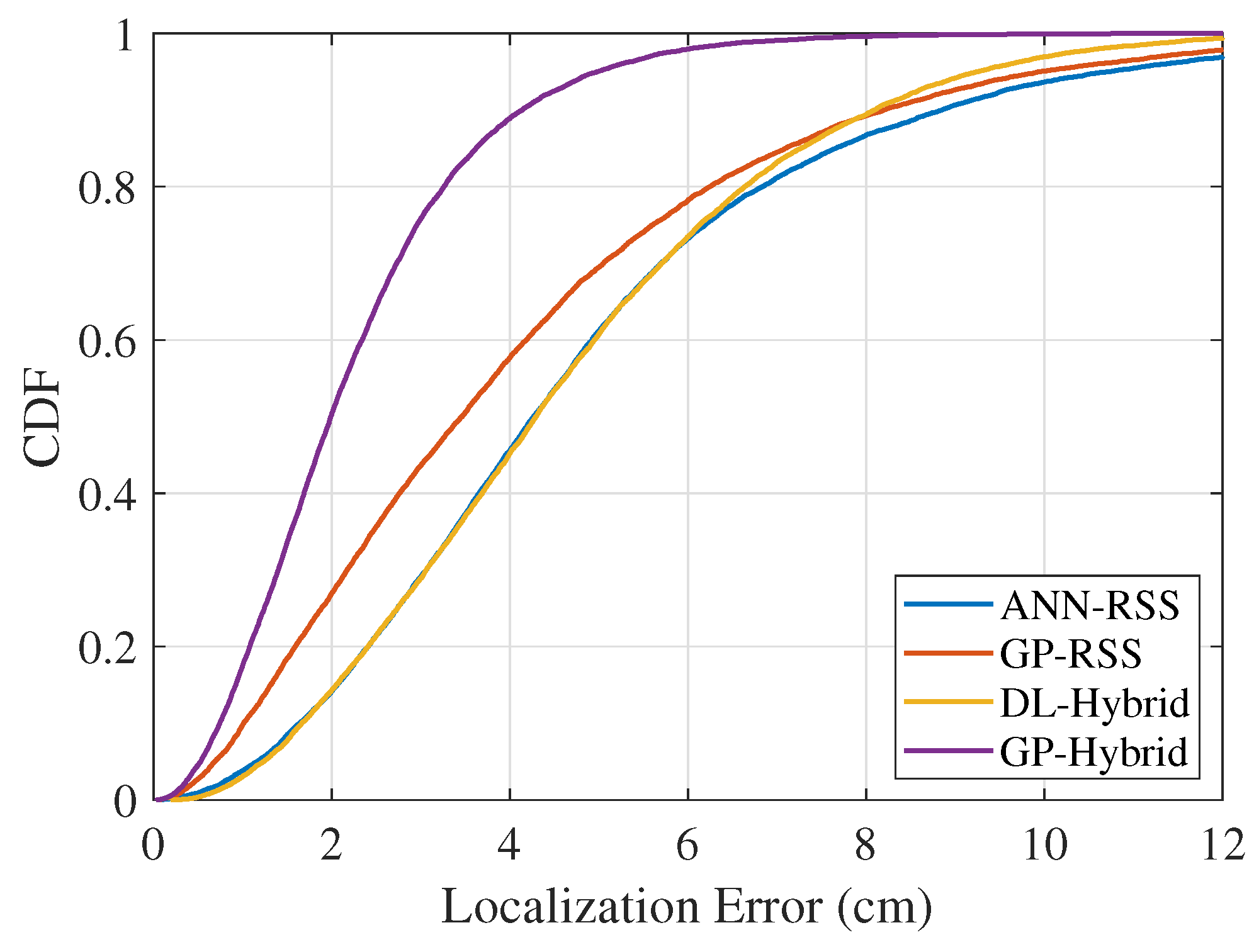
4.2.4. Positioning Performance Comparison of Different ML Algorithms and Hybrid Algorithm
4.2.5. Positioning Performance and Prospect of Hybrid Algorithm in Three-Dimensional (3D) Positioning System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Hua, L.; Zhuang, Y.; Li, Y.; Wang, Q.; Zhou, B.; Qi, L.; Yang, J.; Cao, Y.; Haas, H. FusionVLP: The Fusion of Photodiode and Camera for Visible Light Positioning. IEEE Trans. Veh. Technol. 2021, 70, 11796–11811. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Valberg, P.A.; Van Deventer, T.E.; Repacholi, M.H. Workgroup Report: Base Stations and Wireless Networks—Radiofrequency (RF) Exposures and Health Consequences. Environ. Health Perspect. 2007, 115, 416–424. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Wang, H.; Youn, C.H. Visible Light Communications for 5G Wireless Networking Systems: From Fixed to Mobile Communications. IEEE Netw. 2014, 28, 41–45. [Google Scholar] [CrossRef]
- Cheema, A.; Alsmadi, M.; Ikki, S. Distance Estimation in Visible Light Communications: The Case of Imperfect Synchronization and Signal-Dependent Noise. IEEE Trans. Veh. Technol. 2021, 70, 11044–11049. [Google Scholar] [CrossRef]
- Zhou, B.; Lau, V.; Chen, Q.; Cao, Y. Simultaneous Positioning and Orientating for Visible Light Communications: Algorithm Design and Performance Analysis. IEEE Trans. Veh. Technol. 2018, 67, 11790–11804. [Google Scholar] [CrossRef]
- Xu, H.; An, F.; Wen, S.; Yan, Z.; Guan, W. Three-Dimensional Indoor Visible Light Positioning with a Tilt Receiver and a High Efficient LED-ID. Electronics 2021, 10, 1265. [Google Scholar] [CrossRef]
- Jeong, E.M.; Yang, S.H.; Kim, H.S.; Han, S.K. Tilted receiver angle error compensated indoor positioning system based on visible light communication. Electron. Lett. 2013, 49, 890–892. [Google Scholar] [CrossRef]
- Li, Q.; Wang, J.; Huang, T.; Wang, Y. Three-dimensional indoor visible light positioning system with a single transmitter and a single tilted receiver. Opt. Eng. 2016, 55, 103–106. [Google Scholar] [CrossRef]
- Huy Q, T.; Cheolkeun, H. Machine learning in indoor visible light positioning systems: A review. Neurocomputing 2022, 491, 117–131. [Google Scholar]
- Chaudhary, N.; Alves, L.N.; Ghassemblooy, Z. Current Trends on Visible Light Positioning Techniques. In Proceedings of the 2019 2nd West Asian Colloquium on Optical Wireless Communications (WACOWC), Tehran, Iran, 27–28 April 2019; pp. 100–105. [Google Scholar]
- Yuan, T.; Xu, Y.; Wang, Y.; Han, P.; Chen, J. A Tilt Receiver Correction Method for Visible Light Positioning Using Machine Learning Method. IEEE Photonics J. 2018, 10, 7909312. [Google Scholar] [CrossRef]
- Alonso-González, I.; Sánchez-Rodríguez, D.; Ley-Bosch, C.; Quintana-Suárez, M.A. Discrete Indoor Three-Dimensional Localization System Based on Neural Networks Using Visible Light Communication. Sensors 2018, 18, 1040. [Google Scholar] [CrossRef] [PubMed]
- Knudde, N.; Raes, W.; De Bruycker, J.; Dhaene, T.; Stevens, N. Data-Efficient Gaussian Process Regression for Accurate Visible Light Positioning. IEEE Commun. Lett. 2020, 24, 1705–1709. [Google Scholar] [CrossRef]
- Zhang, S.; Du, P.; Chen, C.; Zhong, W.D.; Alphones, A. Robust 3D Indoor VLP System Based on ANN Using Hybrid RSS/PDOA. IEEE Access 2019, 7, 47769–47780. [Google Scholar] [CrossRef]
- Du, P.; Zhang, S.; Chen, C.; Alphones, A.; Zhong, W.D. Demonstration of a Low-Complexity Indoor Visible Light Positioning System Using an Enhanced TDOA Scheme. IEEE Photonics J. 2018, 10, 1–10. [Google Scholar] [CrossRef]
- Feng, L.; Yang, H.; Hu, R.Q.; Wang, J. MmWave and VLC-Based Indoor Channel Models in 5G Wireless Networks. IEEE Wirel. Commun. 2018, 25, 70–77. [Google Scholar] [CrossRef]
- Wu, S.; Bar-Ness, Y. OFDM Systems in the Presence of Phase Noise: Consequences and Solutions. IEEE Trans. Commun. 2004, 52, 1988–1996. [Google Scholar] [CrossRef]
- Zeng, L.; O’Brien, D.C.; Minh, H.L.; Faulkner, G.E.; Lee, K.; Jung, D.; Oh, Y.; Won, E.T. High Data Rate Multiple Input Multiple Output (MIMO) Optical Wireless Communications Using White LED Lighting. IEEE J. Sel. Areas Commun. 2009, 27, 1654–1662. [Google Scholar] [CrossRef]
- Liu, H.; Ong, Y.S.; Shen, X.; Cai, J. When Gaussian Process Meets Big Data: A Review of Scalable GPs. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4405–4423. [Google Scholar] [CrossRef]
- Williams, C.K.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2. [Google Scholar]
- Liu, K.; Hu, X.; Wei, Z.; Li, Y.; Jiang, Y. Modified Gaussian Process Regression Models for Cyclic Capacity Prediction of Lithium-Ion Batteries. IEEE Trans. Transp. Electrif. 2019, 5, 1225–1236. [Google Scholar] [CrossRef]
- Williams, C.; Barber, D. Bayesian Classification With Gaussian Processes. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1342–1351. [Google Scholar] [CrossRef]
- Duvenaud, D.K.; Nickisch, H.; Rasmussen, C. Additive Gaussian Processes. In NIPS’15: Proceedings of the 28th International Conference on Neural Information Processing Systems; Shawe-Taylor, J., Zemel, R., Bartlett, P., Pereira, F., Weinberger, K., Eds.; MIT Press: Cambridge, MA, USA, 2011; Volume 24. [Google Scholar]
- Singh, J.; Raza, U. Passive Visible Light Positioning Systems: An Overview. In Proceedings of the Workshop on Light Up the IoT; ACM: New York, NY, USA, 2020; pp. 48–53. [Google Scholar]
- Carreño, C.; Krommenacker, N.; Charpentier, P. Resilience and Robustness in Visible Light Positioning Systems: An introductory Approach. IFAC-PapersOnLine 2022, 55, 95–100. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of LEDs | 4 |
| Height of receiver | 0.8 m |
| Power of OFDM signal for each LED | 3.75 W |
| Size of training set for GP model | 100 |
| Size of test set for GP model | |
| Standard deviation of the tilted receiver | |
| Standard deviation of | |
| the distance difference error in TDOA algorithm | 1 cm |
| The semiangle at half power | |
| The Lambertian radiation pattern | 1 |
| The responsivity of PD | 0.6 A/W |
| Bandwidth | 100 MHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, X.; Wang, Z.; Yu, J.; Jiang, Y. Hybrid Positioning Algorithm for Tilted Receiver Using RSS and TDOA with Gaussian Process. Photonics 2023, 10, 538. https://doi.org/10.3390/photonics10050538
Zuo X, Wang Z, Yu J, Jiang Y. Hybrid Positioning Algorithm for Tilted Receiver Using RSS and TDOA with Gaussian Process. Photonics. 2023; 10(5):538. https://doi.org/10.3390/photonics10050538
Chicago/Turabian StyleZuo, Xunhe, Zixiong Wang, Jinlong Yu, and Yang Jiang. 2023. "Hybrid Positioning Algorithm for Tilted Receiver Using RSS and TDOA with Gaussian Process" Photonics 10, no. 5: 538. https://doi.org/10.3390/photonics10050538
APA StyleZuo, X., Wang, Z., Yu, J., & Jiang, Y. (2023). Hybrid Positioning Algorithm for Tilted Receiver Using RSS and TDOA with Gaussian Process. Photonics, 10(5), 538. https://doi.org/10.3390/photonics10050538