A Comprehensive Review of UAV-Assisted FSO Relay Systems

 , , ,
, , ,  and
and
Abstract
:1. Introduction
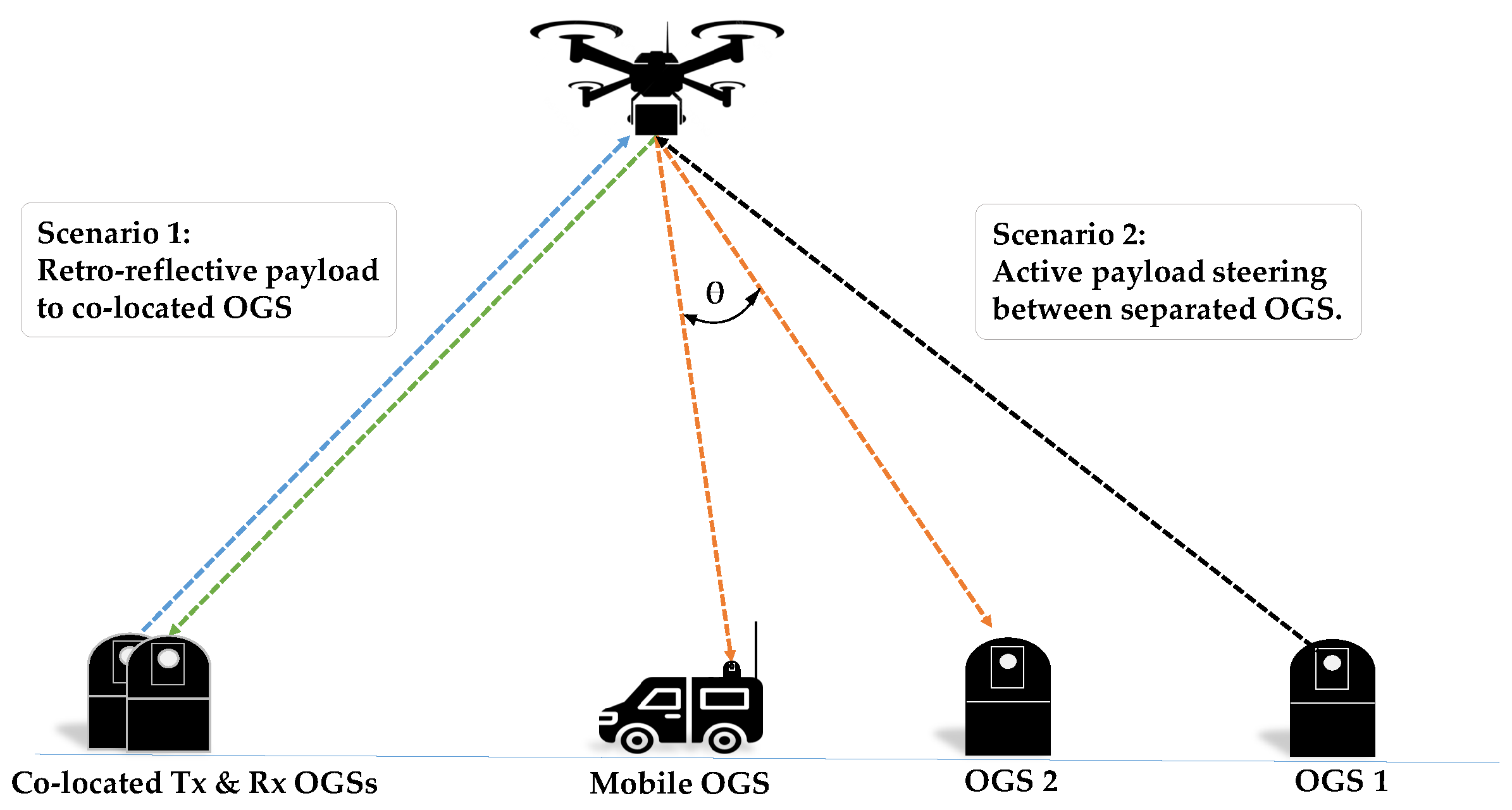
- Non-LOS FSO Communications:The absence of a direct Line of Sight between the transmitting and receiving terminals is the key challenge of FSO communication, which relay systems primarily aim to solve. As a solution, UAV platforms relay the transmission from high altitudes and enable communication between terrestrial Optical Ground Stations (OGSs) that have obstacles between. In a UAV-enabled FSO relay system, the Transmitter (Tx) and Receiver (Rx) OGS establish and maintain a stable link by utilizing transmission equipment such as laser sources, amplifiers, modulators, lenses, steering mirrors, collimators, and adaptive optics for encoding and transmitting optical signals. The Rx equipment at the OGS includes telescopes, collimators, photodetectors, amplifiers, filters, demodulators, and communication interfaces. To track and align with the UAV, the OGS employs a Pointing, Acquisition, and Tracking (PAT) system that includes actuated gimbal mechanisms, steering mirrors, controllers, and beam or visual tracking apparatus like position-sensing detectors or cameras. A feedback system, potentially using a Radio Frequency (RF) wireless system, facilitates data exchange between the ground and aerial nodes. Comparatively, the UAV platform consists primarily of a payload module housing a reflective module and, optionally, a stabilization module. UAVs typically incorporate an Inertial Measurement Unit (IMU) suite for sensing orientation and motion, as well as an RF module for PAT feedback communication with the OGS. Overall, in a UAV-assisted FSO relay system, the OGS involves a wide range of equipment, giving researchers flexibility in selecting and configuring components to meet performance requirements, customization needs, and design constraints. Meanwhile, UAVs should only include the strictly necessary components for operation, with payload selection or customization dependent on the research objectives.Furthermore, by using UAV functionalities like collision avoidance and obstacle detection, the system can evade mobile obstacles and even be adaptive to maintain the relay transmission with mobile OGS. Moreover, different aerial platform form factors ranging from buoyant to tethered forms can be exploited for specific performance capabilities, primarily operating at various altitudes to achieve wider coverage and longer endurance operations, respectively.
- Wireless Connectivity to Remote Areas:UAV platforms present a cost-effective vertical FSO communication infrastructure, and their deployment has minimal time and complexity implications. This implies that FSO communication can be promptly deployed to deliver 5G/6G connectivity to remote locations such as mountains, deserts, and oceans that are deprived of readily available communication infrastructure, and even rural and low-population locations, where terrestrial infrastructure is not economically viable for modern cellular or internet connectivity.
- Disaster Events Relief Efforts:UAV-assisted FSO relay systems can be deployed to provide prompt and temporary infrastructure enabling reliable communication, even where massive, low-latency connections to devices are required to aid relief services, and where the communication infrastructure needs mobility to adapt to an active/ongoing disaster/hazard. Such events could lead to the failure of terrestrial infrastructure, and aerial platform deployment can complement the cellular network [12], ensuring continuous connectivity. The authors of [13] support the utility of aerial platforms for such scenarios, where timely and economical terrestrial infrastructure deployment is infeasible.
- Interfacing between Terrestrial and Satellite Communications:Space-air-ground integrated network (SAGIN) is an architecture considered to overcome geographical boundaries and support global high data rate connectivity. The mobility and heterogeneity of UAV-enabled FSO relay systems/networks can be exploited to adapt to high satellite rates and provide an intermediate communication relay node between the satellite platform and OGS [14], thereby significantly extending satellite visibility [15].
- High Altitude Networks/Swarms:By deploying multiple aerial platforms, UAV-enabled FSO systems are projected to achieve UAV-to-UAV topology that can offer a scalable aerial network capable of backhaul/fronthaul connectivity [16]. Furthermore, such implementation can achieve a cooperative swarm formation adaptable to further extend the transmission range [17].
2. UAV Platforms and Architectures
2.1. High Altitude Platforms (HAPs)
2.2. Low Altitude Platforms (LAPs)
2.2.1. Tethered Platforms
2.2.2. Free-Flying Platforms
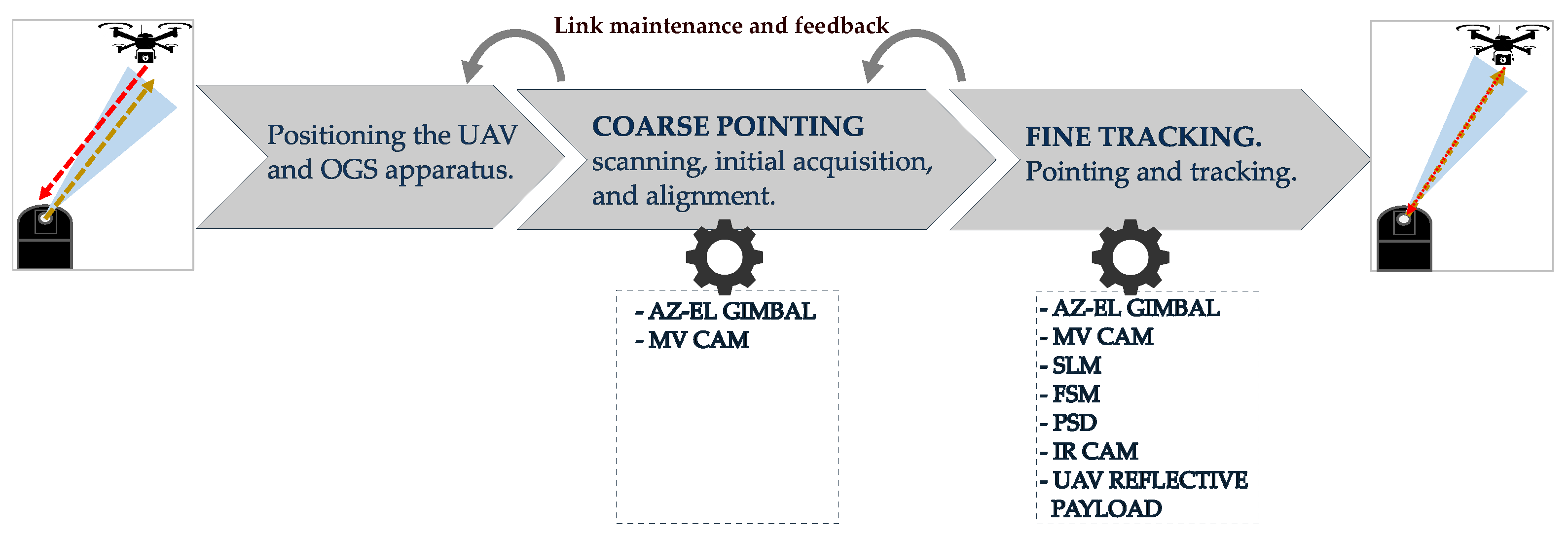
3. Pointing Acquisition and Tracking
4. Payloads for UAV FSO Relay
4.1. Passive Reflective
4.2. Active Reflective
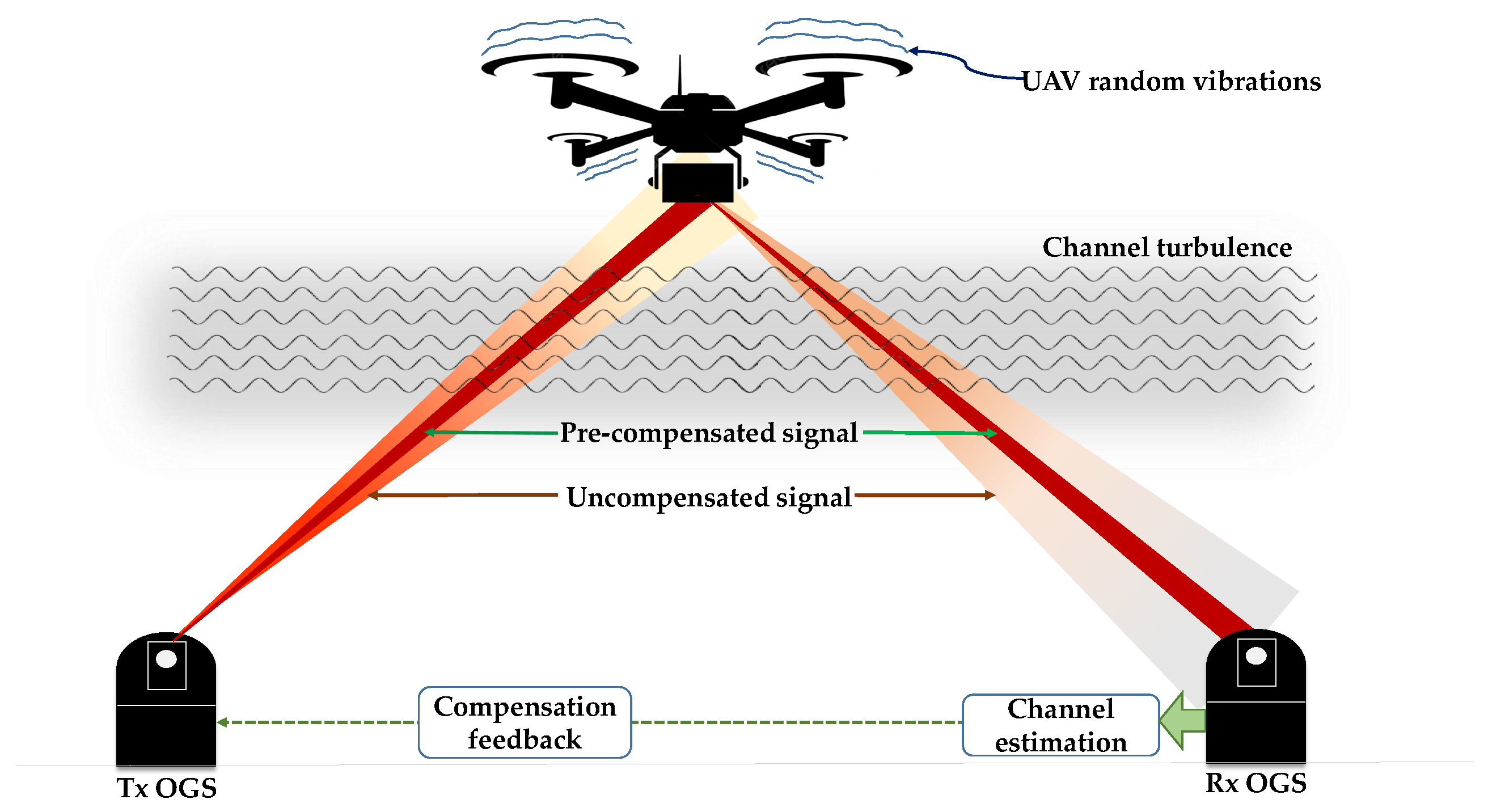
5. Impact of Atmospheric Turbulence, UAV Vibration, and the Role of Channel Estimation
6. Design Requirements and Considerations
7. Challenges and Research Gaps
7.1. SWaP Constraints
7.2. Passive vs. Active Payloads
7.3. Atmospheric Turbulence
- (i)
- Experimental active payloads: Resorting to a combination of FSMs with adaptive optics algorithms might be effective in counterbalancing the degrading effects of receiving the optical wave off-axis [75]. Although this is a solution to terrestrial point-to-point turbulence effects, integrating FSMs as an active UAV payload opens the possibility for the UAV platform to compensate for offsets introduced by atmospheric effects. However, this solution still requires experimental validation.
- (ii)
- Optical power control: Another potential solution is to employ optical power control to provide power level compensation at the transmitter or the receiver terminals. Implementing this solution at the receiver terminal implies boosting the power levels using optical amplifiers such as an Erbium-Doped Fiber Amplifier (EDFA) to compensate for power losses from the atmosphere, while implementing power control at the transmitter side is based on pre-compensation of predicted signal attenuation from the channel. Both architectures aim to ensure that the power levels do not fall below acceptable threshold values.
- (iii)
- Adaptive optics: Another solution that has been frequently exploited for point-to-point FSO links is to employ adaptive optics techniques that utilize real-time feedback to dynamically correct distortions to the beam. This includes using wavefront sensors and deformable mirror modules like SLM to compensate for aberrations to the wavefront.
- (iv)
- Adaptive signal modulation: A promising solution is found in advanced methods such as adaptive modulation schemes, which have been shown to improve transmission capacity by adapting the modulation scheme based on the channel’s conditions. Although adaptive modulation has been explored for terrestrial experiments, implementing it in a UAV-relay scenario to compensate for atmospheric losses is a solution to be explored. Also, robust modulation schemes like Trellis-Coded Modulation (TCM) and Orthogonal Frequency-Division Multiplexing (OFDM) help combat fading and errors caused by turbulence.
- (v)
- Hybrid RF-FSO: Furthermore, a solution can be found in adopting a hybrid RF-FSO communication method that allows switching between optical and RF links or simultaneous operation. This provides communication redundancy and flexibility to accommodate impairments from unfavorable atmospheric conditions and ensure link reliability. However, challenges such as data rate mismatch and optimal signaling and routing need to be addressed [76].
- (vi)
- Spatial diversity: Diversity techniques at the transmitter and receiver terminals involve utilizing multiple parallel optical paths or multiple receiver apertures to mitigate the impact of a turbulent channel. By combining the signals received from different paths or apertures, the effects of turbulence can be mitigated. Implementing such techniques in a UAV-enabled relay scenario, possibly with a UAV swarm of multiple relays, could be worth exploring as a possible solution.
- (vii)
- Improved fiber coupling: Several UAV relay scenarios adopt photodetector-based receivers. However, high-rate communication methods, such as coherent communications capable of hundreds of Gbps up to multi-Tbps, utilize optical collimator heads that focus the beam into a coupled fiber and thus are sensitive to geometric alignment between the beam wavefront and the fiber interface. Hence, a tight fiber coupling is required to eliminate losses from distorted beam angles. Also, special fibers with larger core diameters might be utilized to accommodate the received beam even at its distorted angle.
7.4. Pointing and Tracking
- (i)
- Vibration-aware PAT: The unique vibrations experienced by UAVs require solutions that accommodate high-frequency motion to cancel them out effectively. One solution to mitigate beam misalignment by platform vibrations is the use of active UAV payloads such as FSMs, coupled with stabilization mechanisms. These payloads provide UAV beam steering and vibration compensation to minimize misalignments and assist in PAT operations while offering higher control freedom and increased FOV. However, to address SWaP constraints, compact modules such as MEMS FSMs can be utilized.
- (ii)
- Hybrid RF-FSO: Another solution is the implementation of a hybrid RF-FSO system that can switch between FSO and RF methods if the optical signal is lost due to misalignment, allowing for signal re-acquisition. The constant RF feedback ensures quick reacquisition of the UAV terminal, especially during large-scale motion. Additionally, the RF component serves as a backup link during communication disruptions.
- (iii)
- Receiver aperture: Increasing the number of receiver apertures on the ground can help reduce PAT requirements. Photodiode receivers are more resilient to pointing errors or offsets, and they offer potentially larger aperture sizes as well as the option of an array of multiple receivers that can capture the FSO beam. However, a wider aperture implies that there may be a trade-off between aperture size and achievable data rate.
- (iv)
- Adaptive optics methods: Coherent communication paradigms that employ optical-to-fiber collimators require strict placement of the beam into the fiber core. In such setups, adaptive methods, such as using SLMs, can be employed to fine-tune the received beam’s position.
7.5. Intelligent Methodologies
7.6. Security and Safety
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Raghavan, V.; Li, J. Evolution of Physical-Layer Communications Research in the Post-5G Era. IEEE Access 2019, 7, 10392–10401. [Google Scholar] [CrossRef]
- Hamza, A.S.; Deogun, J.S.; Alexander, D.R. Classification Framework for Free Space Optical Communication Links and Systems. IEEE Commun. Surv. Tutor. 2019, 21, 1346–1382. [Google Scholar] [CrossRef]
- Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter Wave Cellular Wireless Networks: Potentials and Challenges. Proc. IEEE 2014, 102, 366–385. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Jornet, J.M.; Han, C. TeraNets: Ultra-Broadband Communication Networks in the Terahertz Band. IEEE Wirel. Commun. 2014, 21, 130–135. [Google Scholar] [CrossRef]
- Fernandes, M.A.; Monteiro, P.P.; Guiomar, F.P. Single-Wavelength Terabit FSO Channel for Datacenter Interconnects Enabled by Adaptive PCS. In Proceedings of the 2021 Optical Fiber Communications Conference and Exhibition (OFC), San Francisco, CA, USA, 6–10 June 2021; pp. 1–3. [Google Scholar]
- Sabri, A.A.; Hameed, S.M.; Hadi, W.A.H. Last Mile Access-Based FSO and VLC Systems. Appl. Opt. 2023, 62, 8402–8410. [Google Scholar] [CrossRef] [PubMed]
- An, N.; Yang, F.; Cheng, L.; Song, J.; Han, Z. Free Space Optical Communications for Intelligent Transportation Systems: Potentials and Challenges. IEEE Veh. Technol. Mag. 2023, 18, 80–90. [Google Scholar] [CrossRef]
- Chaudhry, A.U.; Yanikomeroglu, H. Free Space Optics for Next-Generation Satellite Networks. IEEE Consum. Electron. Mag. 2021, 10, 21–31. [Google Scholar] [CrossRef]
- Schieler, C.M.; Riesing, K.M.; Bilyeu, B.C.; Chang, J.S.; Garg, A.S.; Gilbert, N.C.; Horvath, A.J.; Reeve, R.S.; Robinson, B.S.; Wang, J.P.; et al. On-Orbit Demonstration of 200-Gbps Laser Communication Downlink from the TBIRD CubeSat. In Proceedings of the Free-Space Laser Communications XXXV, San Francisco, CA, USA, 28 January–3 February 2023; Hemmati, H., Robinson, B.S., Eds.; SPIE: Bellingham, WA, USA, 2023; p. 1. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless Communications with Unmanned Aerial Vehicles: Opportunities and Challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and Multilayer UAV Networks for Next-Generation Wireless Communication and Power Transfer: A Feasibility Study. IEEE Internet Things J. 2019, 6, 7103–7115. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, H.; Xie, Z. Space-Air-Ground Integrated Network (SAGIN): A Survey. IEEE Commun. Surv.Tutor. 2023, 20, 2714–2741. [Google Scholar] [CrossRef]
- Alimi, I.A.; Mufutau, A.O.; Teixeira, A.L.; Monteiro, P.P. Performance Analysis of Space-Air-Ground Integrated Network (SAGIN) Over an Arbitrarily Correlated Multivariate FSO Channel. Wirel. Pers. Commun. 2018, 100, 47–66. [Google Scholar] [CrossRef]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M.S. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef]
- Majumdar, A.K. Free-Space Optical (FSO) Platforms: Unmanned Aerial Vehicle (UAV) and Mobile. In Advanced Free Space Optics (FSO): A Systems Approach; Majumdar, A.K., Ed.; Springer Series in Optical Sciences; Springer: New York, NY, USA, 2015; pp. 203–225. [Google Scholar] [CrossRef]
- Han, B.; Jiang, W.; Habibi, M.A.; Schotten, H.D. An Abstracted Survey on 6G: Drivers, Requirements, Efforts, and Enablers. arXiv 2021, arXiv:2101.01062. [Google Scholar]
- Akhtar, M.W.; Hassan, S.A.; Ghaffar, R.; Jung, H.; Garg, S.; Hossain, M.S. The Shift to 6G Communications: Vision and Requirements. Hum.-Centric Comput. Inf. Sci. 2020, 10, 53. [Google Scholar] [CrossRef]
- Belmekki, B.E.Y.; Alouini, M.S. Unleashing the Potential of Networked Tethered Flying Platforms: Prospects, Challenges, and Applications. IEEE Open J. Veh. Technol. 2022, 3, 278–320. [Google Scholar] [CrossRef]
- Ghamari, M.; Rangel, P.; Mehrubeoglu, M.; Tewolde, G.S.; Sherratt, R.S. Unmanned Aerial Vehicle Communications for Civil Applications: A Review. IEEE Access 2022, 10, 102492–102531. [Google Scholar] [CrossRef]
- Levitate Capital. The Future of the Drone Economy. Levitate Capital Technical Report. 2020. Available online: https://levitatecap.com/levitate/wp-content/uploads/2020/12/Levitate-Capital-White-Paper.pdf (accessed on 6 December 2023).
- Quintana, C.; Wang, Q.; Jakonis, D.; Oberg, O.; Erry, G.; Platt, D.; Thueux, Y.; Faulkner, G.; Chun, H.; Gomez, A.; et al. A High Speed Retro-Reflective Free Space Optics Links with UAV. J. Light. Technol. 2021, 39, 5699–5705. [Google Scholar] [CrossRef]
- Li, L.; Zhang, R.; Zhao, Z.; Xie, G.; Liao, P.; Pang, K.; Song, H.; Liu, C.; Ren, Y.; Labroille, G.; et al. High-Capacity Free-Space Optical Communications between a Ground Transmitter and a Ground Receiver via a UAV Using Multiplexing of Multiple Orbital-Angular-Momentum Beams. Sci. Rep. 2017, 7, 17427. [Google Scholar] [CrossRef]
- Moision, B.; Erkmen, B.; Keyes, E.; Belt, T.; Bowen, O.; Brinkley, D.; Csonka, P.; Eglington, M.; Kazmierski, A.; Kim, N.h.; et al. Demonstration of Free-Space Optical Communication for Long-Range Data Links between Balloons on Project Loon. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXIX, San Francisco, CA, USA, 28 January–2 February 2017; SPIE: Bellingham, WA, USA, 2017; Volume 10096, pp. 259–272. [Google Scholar] [CrossRef]
- Horwath, J.; Perlot, N.; Knapek, M.; Moll, F. Experimental Verification of Optical Backhaul Links for High-Altitude Platform Networks: Atmospheric Turbulence and Downlink Availability. Int. J. Satell. Commun. Netw. 2007, 25, 501–528. [Google Scholar] [CrossRef]
- Cunningham, J.; Foulke, D.; Goode, T.; Baber, D.; Gaughan, B.; Fletcher, M.; Young, D.W.; Juarez, J.C.; Sluz, J.E.; Riggins, J.L. Long Range Field Testing of Free Space Optical Communications Terminals on Mobile Platforms. In Proceedings of the MILCOM 2009—2009 IEEE Military Communications Conference, Boston, MA, USA, 18–21 October 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Sova, R.M.; Sluz, J.E.; Young, D.W.; Juarez, J.C.; Dwivedi, A.; Iii, N.M.D.; Graves, J.E.; Northcott, M.; Douglass, J.; Phillips, J.; et al. 80 Gb/s Free-Space Optical Communication Demonstration between an Aerostat and a Ground Terminal. In Proceedings of the Free-Space Laser Communications VI, San Diego, CA, USA, 13–17 August 2006; SPIE: Bellingham, WA, USA, 2006; Volume 6304, pp. 267–276. [Google Scholar] [CrossRef]
- Yu, S.; Li, B.; Cao, K.; Hao, G.; Du, H. Design and Verification of Free Space Optical Communication Relay between Ground and Tethered Ball. Trans. Nanjing Univ. Aeronaut. Astronaut. 2023, 60–70. [Google Scholar] [CrossRef]
- Ishola, F.; Carrasco-Casado, A.; Dimitar, K.; Trinh, P.; Shiratama, K.; Fuse, T.; Tsuji, H.; Toyoshima, M. Development of Tethered Unmanned Aerial Vehicle Laser Communication Station for Beyond-5G Applications; International Astronautical Federation: Paris, France, 2022. [Google Scholar]
- Goetz, P.G.; Rabinovich, W.S.; Mahon, R.; Murphy, J.L.; Ferraro, M.S.; Suite, M.R.; Smith, W.R.; Burris, H.R.; Moore, C.I.; Schultz, W.W.; et al. Modulating Retro-Reflector Lasercom Systems for Small Unmanned Vehicles. IEEE J. Sel. Areas Commun. 2012, 30, 986–992. [Google Scholar] [CrossRef]
- Shortt, K.; Giggenbach, D.; Mata-Calvo, R.; Moll, F.; Fuchs, C.; Schmidt, C.; Horwath, J.; Yeh, J.; Selvaraj, V.; Banerjee, R. Channel Characterization for Air-to-Ground Free-Space Optical Communication Links. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXVI, San Francisco, CA, USA, 1–6 February 2014; SPIE: Bellingham, WA, USA, 2014; Volume 8971, pp. 68–80. [Google Scholar] [CrossRef]
- Chen, C.; Grier, A.; Malfa, M.; Booen, E.; Harding, H.; Xia, C.; Hunwardsen, M.; Demers, J.; Kudinov, K.; Mak, G.; et al. Demonstration of a Bidirectional Coherent Air-to-Ground Optical Link. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXX, San Francisco, CA, USA, 27 January–1 February 2018; SPIE: Bellingham, WA, USA, 2018; Volume 10524, pp. 120–134. [Google Scholar] [CrossRef]
- Quintana, C.; Erry, G.; Gomez, A.; Thueux, Y.; Faulkner, G.E.; O’Brien, D.C. Design of a Holographic Tracking Module for Long-Range Retroreflector Free-Space Systems. Appl. Opt. 2016, 55, 7173–7178. [Google Scholar] [CrossRef] [PubMed]
- Trinh, P.V.; Carrasco-Casado, A.; Okura, T.; Tsuji, H.; Kolev, D.R.; Shiratama, K.; Munemasa, Y.; Toyoshima, M. Experimental Channel Statistics of Drone-to-Ground Retro-Reflected FSO Links with Fine-Tracking Systems. IEEE Access 2021, 9, 137148–137164. [Google Scholar] [CrossRef]
- Liu, H.Y.; Tian, X.H.; Gu, C.; Fan, P.; Ni, X.; Yang, R.; Zhang, J.N.; Hu, M.; Guo, J.; Cao, X.; et al. Drone-Based Entanglement Distribution towards Mobile Quantum Networks. Natl. Sci. Rev. 2020, 7, 921–928. [Google Scholar] [CrossRef]
- Walsh, S.M.; Karpathakis, S.F.E.; McCann, A.S.; Dix-Matthews, B.P.; Frost, A.M.; Gozzard, D.R.; Gravestock, C.T.; Schediwy, S.W. Demonstration of 100 Gbps Coherent Free-Space Optical Communications at LEO Tracking Rates. Sci. Rep. 2022, 12, 18345. [Google Scholar] [CrossRef] [PubMed]
- Thueux, Y.; Avlonitis, N.; Erry, G. DAZZLE Project: UAV to Ground Communication System Using a Laser and a Modulated Retro-Reflector. In Proceedings of the SPIE SECURITY + DEFENCE, Amsterdam, The Netherlands, 22–25 September 2014; Volume 9248. [Google Scholar] [CrossRef]
- Tu, C.; Shen, J.; Dai, J.; Zhang, L.; Wang, J. A Lower Size, Weight Acquisition and Tracking System for Airborne Quantum Communication. IEEE Photonics J. 2022, 14, 7356908. [Google Scholar] [CrossRef]
- Qi, W.; Hou, W.; Song, Q.; Guo, L.; Jamalipour, A. Topology Control and Routing Based on Adaptive RF/FSO Switching in Space-Air Integrated Networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, S.; Yang, P.; Alhussein, O.; Zhuang, W.; Shen, X.S. Software Defined Space-Air-Ground Integrated Vehicular Networks: Challenges and Solutions. IEEE Commun. Mag. 2017, 55, 101–109. [Google Scholar] [CrossRef]
- Horwath, J.; Gonzalez, D.D.; Navajas, L.M.; Souto, A.L.; Semerjyan, V.; Raju, G.; Grabowsky, J.; Garcia, C.; Lai, Y.; Bähr, T.; et al. Test Results of Error-Free Bidirectional 10 Gbps Link for Air-to-Ground Optical Communications. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXX, San Francisco, CA, USA, 27 January–1 February 2018; SPIE: Bellingham, WA, USA, 2018; Volume 10524, pp. 417–430. [Google Scholar] [CrossRef]
- Cui, J.; Ng, S.X.; Liu, D.; Zhang, J.; Nallanathan, A.; Hanzo, L. Multiobjective Optimization for Integrated Ground-Air-Space Networks: Current Research and Future Challenges. IEEE Veh. Technol. Mag. 2021, 16, 88–98. [Google Scholar] [CrossRef]
- Han, S.I. Survey on UAV Deployment and Trajectory in Wireless Communication Networks: Applications and Challenges. Information 2022, 13, 389. [Google Scholar] [CrossRef]
- Tethered Aerostats—TCOM. Available online: https://tcomlp.com/aerospace-platforms/tethered-aerostats/ (accessed on 4 January 2024).
- Kishk, M.; Bader, A.; Alouini, M.S. Aerial Base Station Deployment in 6G Cellular Networks Using Tethered Drones: The Mobility and Endurance Tradeoff. IEEE Veh. Technol. Mag. 2020, 15, 103–111. [Google Scholar] [CrossRef]
- European Union Law. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft (Text with EEA Relevance). Available online: https://eur-lex.europa.eu/eli/reg_impl/2019/947/oj/eng (accessed on 12 December 2023).
- Spreading Wings S900—DJI. Available online: https://www.dji.com/pt/spreading-wings-s900 (accessed on 4 January 2024).
- Abdelfatah, R.; Alshaer, N.; Ismail, T. A Review on Pointing, Acquisition, and Tracking Approaches in UAV-based Fso Communication Systems. Opt. Quantum Electron. 2022, 54, 571. [Google Scholar] [CrossRef]
- Isaac-Medina, B.K.S.; Poyser, M.; Organisciak, D.; Willcocks, C.G.; Breckon, T.P.; Shum, H.P.H. Unmanned Aerial Vehicle Visual Detection and Tracking Using Deep Neural Networks: A Performance Benchmark. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, QC, Canada, 11–17 October 2021. [Google Scholar] [CrossRef]
- Kasturi, A.; Milanovic, V.; Atwood, B.H.; Yang, J. UAV-borne Lidar with MEMS Mirror-Based Scanning Capability. In Proceedings of the SPIE Defense + Security, Baltimore, MD, USA, 17–21 April 2016; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2016; p. 98320M. [Google Scholar] [CrossRef]
- Abadi, M.M.; Cox, M.A.; Alsaigh, R.E.; Viola, S.; Forbes, A.; Lavery, M.P.J. A Space Division Multiplexed Free-Space-Optical Communication System That Can Auto-Locate and Fully Self Align with a Remote Transceiver. Sci. Rep. 2019, 9, 19687. [Google Scholar] [CrossRef]
- Safi, H.; Dargahi, A.; Cheng, J. Beam Tracking for UAV-Assisted FSO Links with a Four-Quadrant Detector. IEEE Commun. Lett. 2021, 25, 3908–3912. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Rezaee, M.; Mohammadi, L.; Javaherian, F.; Yazdanian, V.; Hasna, M.O.; Uysal, M. Modulating Retroreflector Based Free Space Optical Link for UAV-to-Ground Communications. IEEE Trans. Wirel. Commun. 2022, 21, 8631–8645. [Google Scholar] [CrossRef]
- MEETOPTICS. Retroreflectors, Corner Cube Reflectors. Available online: https://bitly.ws/3fndd (accessed on 5 March 2024).
- Ishola, F.; Cho, M. Experimental Study on Photodiode Array Sensor Aided MEMS Fine Steering Mirror Control for Laser Communication Platforms. IEEE Access 2021, 9, 100197–100207. [Google Scholar] [CrossRef]
- Fast Steering Mirrors. Available online: https://www.optotune.com/fast-steering-mirrors (accessed on 5 March 2024).
- S-340 Piezo Tip/Tilt Platform. Available online: https://bitly.ws/3fnhL (accessed on 4 March 2024).
- Mirrorcle MEMS Mirrors—Technical Overview. 2021. Available online: https://bitly.ws/3fnbt (accessed on 5 March 2024).
- Integrated Mirrors. 2024. Available online: https://www.mirrorcletech.com/wp/products/mems-mirrors/dual/integrated/ (accessed on 5 March 2024).
- Electromagentically Driven MEMS Mirrors. 2021. Available online: https://www.hamamatsu.com/eu/en/product/optical-components/mems-mirror.html (accessed on 5 March 2023).
- Cui, M.; Zhang, G.; Zhang, R. Secure Wireless Communication via Intelligent Reflecting Surface. IEEE Wirel. Commun. Lett. 2019, 8, 1410–1414. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Alsharif, M.H.; Uthansakul, P.; Solyman, A.A.A. Intelligent Reflecting Surfaces Assisted UAV Communications for Massive Networks: Current Trends, Challenges, and Research Directions. Sensors 2022, 22, 5278. [Google Scholar] [CrossRef]
- Malik, S.; Saxena, P.; Chung, Y.H. Performance Analysis of a UAV-based IRS-assisted Hybrid RF/FSO Link with Pointing and Phase Shift Errors. J. Opt. Commun. Netw. 2022, 14, 303–315. [Google Scholar] [CrossRef]
- Safi, H.; Dargahi, A.; Cheng, J. Spatial Beam Tracking and Data Detection for an FSO Link to a UAV in the Presence of Hovering Fluctuations. arXiv 2019, arXiv:1904.03774. [Google Scholar] [CrossRef]
- Jebur, B.A.; Alkassar, S.H.; Abdullah, M.A.M.; Tsimenidis, C.C. Efficient Machine Learning-Enhanced Channel Estimation for OFDM Systems. IEEE Access 2021, 9, 100839–100850. [Google Scholar] [CrossRef]
- Mishra, P.; Sonali; Dixit, A.; Jain, V.K. Machine Learning Techniques for Channel Estimation in Free Space Optical Communication Systems. In Proceedings of the 2019 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Goa, India, 16–19 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Esmail, M.A.; Saif, W.S.; Ragheb, A.M.; Alshebeili, S.A. Free Space Optic Channel Monitoring Using Machine Learning. Opt. Express 2021, 29, 10967–10981. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhang, M.; Wang, D.; Wu, S.; Zhan, Y. Joint Atmospheric Turbulence Detection and Adaptive Demodulation Technique Using the CNN for the OAM-FSO Communication. Opt. Express 2018, 26, 10494–10508. [Google Scholar] [CrossRef] [PubMed]
- Lionis, A.; Peppas, K.; Nistazakis, H.E.; Tsigopoulos, A.; Cohn, K.; Zagouras, A. Using Machine Learning Algorithms for Accurate Received Optical Power Prediction of an FSO Link over a Maritime Environment. Photonics 2021, 8, 212. [Google Scholar] [CrossRef]
- Fernandes, M.A.; Nascimento, J.L.; Monteiro, P.P.; Guiomar, F.P. Highly Reliable Outdoor 400G FSO Transmission Enabled by ANN Channel Estimation. In Proceedings of the 2022 Optical Fiber Communications Conference and Exhibition (OFC), San Diego, CA, USA, 6–10 March 2022; pp. 1–3. [Google Scholar]
- Cai, C.; Wu, S.; Jiang, L.; Zhang, Z.; Yang, S. A 500-W Wireless Charging System with Lightweight Pick-Up for Unmanned Aerial Vehicles. IEEE Trans. Power Electron. 2020, 35, 7721–7724. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling with Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef]
- Carrasco-Casado, A.; Shiratama, K.; Trinh, P.V.; Kolev, D.; Ishola, F.; Fuse, T.; Tsuji, H.; Toyoshima, M. NICT’s Versatile Miniaturized Lasercom Terminals for Moving Platforms. In Proceedings of the 2022 IEEE International Conference on Space Optical Systems and Applications (ICSOS), Kyoto City, Japan, 28–31 March 2022; pp. 213–217. [Google Scholar] [CrossRef]
- Barrios, R.; Dios, F. Wireless Optical Communications Through the Turbulent Atmosphere: A Review. In Optical Communications Systems; Das, N., Ed.; IntechOpen: Rijeka, Croatia, 2012. [Google Scholar] [CrossRef]
- Khalighi, M.A.; Uysal, M. Survey on Free Space Optical Communication: A Communication Theory Perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Khalid, H.; Hashim, S.J.; Hashim, F.; Ahamed, S.M.S.; Chaudhary, M.A.; Altarturi, H.H.M.; Saadoon, M. HOOPOE: High Performance and Efficient Anonymous Handover Authentication Protocol for Flying Out of Zone UAVs. IEEE Trans. Veh. Technol. 2023, 72, 10906–10920. [Google Scholar] [CrossRef]
- Elamassie, M.; Uysal, M. Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks. Photonics 2023, 10, 1210. [Google Scholar] [CrossRef]
- Seo, J.; Kim, Y.; Kim, S.; Tsourdos, A. Collision Avoidance Strategies for Unmanned Aerial Vehicles in Formation Flight. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2718–2734. [Google Scholar] [CrossRef]
- Zhu, X.; Liang, Y.; Yan, M. A Flexible Collision Avoidance Strategy for the Formation of Multiple Unmanned Aerial Vehicles. IEEE Access 2019, 7, 140743–140754. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Platform Type | Altitude | Description | |
|---|---|---|---|---|
| HAP | Aerostat |  | 17 km–22 km | Longer endurance vehicles, typically buoyant aerostats, operating in the stratosphere, thereby having a wide field of view, and with a large lift capacity to accommodate a range of communication apparatus. |
| LAP | Tethered Aerostat |  | 300 m–10 km | More compact and streamlined form, capable of operating within the troposphere. It is usually tethered to the ground, allowing long-duration operations but a with limited range of motion. |
| Fixed-wing free-flying |  | 30 m–10 km | Fixed-wing platforms are characterized by propellers and wings that provide horizontal take-off. They are capable of tropospheric flight, and the hybrid variants with multiple rotors and wings are capable of minimal hovering in operation. | |
| Multi-rotor free-flying |  | 30 m–120 m | Multi-rotor platforms are cost-effective platforms operating within regulated altitudes, capable of vertical take-off, with hover capabilities and agile flight over every degree of freedom. | |
| Classification | Source | Demonstration | Altitude | |
|---|---|---|---|---|
| HAPs | ||||
| Aerostat | [25] | Launched a pair of balloons that utilize long-range FSO links to augment terrestrial cellular networks with LTE wireless internet connectivity. | 20 km | |
| [26] | Deployed a stratospheric balloon to study the turbulence effect of FSO communications at higher altitudes. | 22 km | ||
| Winged/Free-flying | [27] | Verified the FSO terminal’s PAT operations using a 2.5 Gbps bidirectional link. | – | |
| LAPs | ||||
| Tethered | Aerostat | [28] | Demonstrated a high-bandwidth UAV-ground FSO link that used a WDM communications technique. | 1 km |
| [29] | Validated a scanning acquisition scheme that compensates for the platform’s rapid altitude oscillations. | 1 km | ||
| Multi-rotor | [30] | Demonstrated the viability of a tethered multi-rotor to relay 10 Gbps full-duplex Ethernet connectivity over a 30 km range for an extended duration due to the tether power supply. | 100 m | |
| Free-flying | Winged | [31] | Interrogated an array of corner-cube MRR pods installed on the wings of a fixed-wing platform using ground-based transmitter and receiver FSO terminal. | – |
| [32] | Characterized air-to-ground FSO channels and compared results with theoretical models to identify requirements for future adaptive optics. | 2 km | ||
| [33] | Demonstrated a bidirectional optical link transmitting 100 Gbps signals. | 5.3 km | ||
| Multi-rotor | [34] | Demonstrated visual-based PAT for a multiple quantum well MRR-mounted UAV relaying a 2 Mbps optical link to ground from 300 m. | <120 m | |
| [23] | Demonstrated a novel EAM-based MRR mounted on a UAV to relay 500 Mbps FSO signals to OGS at 560 m range. | <120 m | ||
| [35] | Investigated the physical channel characteristics of a retro-reflected signal from a commercial multi-rotor UAV that combines channel impairments with random trajectories from the drone’s hovering. | 15–20 m | ||
| [24] | Demonstrated the relay of an 80 Gbps FSO signal with two multiplexed OAM modes between Tx and Rx OGS via a UAV-mounted retro-reflector. | 20 m | ||
| [36] | Demonstrated a mobile entanglement distribution between two ground stations at a 200 m separation using a UAV-mounted entangle-photon source. | – | ||
| [37] | Demonstrated the ability to sustain a relay link between an OGS and a UAV at a horizontal flight speed of 60 km/h. | 120 m | ||
| [35] | Investigated the underlying physical channel effects of aerial retro-reflected FSO signals due to the combination of channel effects and the UAV’s hovering random trajectories that result in AoA fluctuations. | 20 m | ||
| [38] | Tested of a UAV-mounted MRR module capable of 20 Mbps relay over ranges of 75 m, 500 m, and 1200 m separation to determine its performance by measuring the BER. | 25 m | ||
| [39] | Tested a quantum key distribution link between UAV and OGS at 7 km separation, thereby validating a customized low-SWaP payload prototype that integrates a steerable mirror & quantum key distribution hardware. | <120 m | ||
| Payload Type | Source | Altitude | Payload Operation | Payload Weight |
|---|---|---|---|---|
| Active | [25] | 20 km | Loon FSO communication terminal | <50 kg |
| [26] | 22 km | Laser + beacon terminal | 17.54 kg | |
| [33] | 5.3 km | Coherent transceiver (Telescope + PAT gimbal) | ≈10 kg | |
| [27] | – | Gimbal + FSO Tx/Rx optics + beacon laser modules | – | |
| [28] | 1 km | WDM optical transmitter terminal with PAT + tip/tilt mirror | 20.5 kg | |
| [29] | 1 km | Laser-generating terminal + IR camera + PAT | <15 kg | |
| [32] | 2 km | 1 Gps transmitter, telescope, PAT terminal | – | |
| [36] | – | A pair of Airborne Entangle Photon Sources (AEPSs) + PAT | 486 g (×2) | |
| [39] | <120 m | Steering mirror, camera, quantum source | 8 kg | |
| [30] | 100 m | 10 Gb Ethernet lasercom terminal + optical segment + MEMS FSM | <4.5 kg | |
| Passive | [31] | <120 m | Corner-cube MRR array pods | 3.6 kg |
| [34] | <120 m | MQW-based MRR | 200 g | |
| [23] | <120 m | EAM-based MRR | – | |
| [24] | 20 m | Retro-reflector module | – | |
| [37] | 120 m | Gimbal-mounted CCR + beacon LEDs + camera | – | |
| [35] | 20 m | CCR module + alignment camera | – | |
| [38] | 25 m | MRR module | 200 g | |
| [35] | 15–20 m | Corner-cube reflector + camera | <4.5 kg |
| Design Requirements | Considerations |
|---|---|
| Stability & control | The UAV should adopt a stabilization module that can counteract the vibrations inherent to propulsion components. |
| The module should have a wide angular range and accurate pointing resolution to complement OGS PAT during hover, vertical, and horizontal flight, and also compensate for UAV heading deviations from wind buffeting or random flight variables. | |
| The module should cater to the specific payload’s mass, dimension, power, and extension port implications and must protect the payload against impact. | |
| Payload | Owing to a tight SWaP constraint, the need for a passive or active payload module should be clearly determined. |
| The symmetry of the payload’s reflective surfaces must be flawless in order not to contribute to angular offsets on the relayed signal. | |
| The UAV’s allowable payload capacity must be sufficient to accommodate equipment and modules required for the communication system’s operation while maintaining stable and controllable flight. | |
| Modularity & scalability | The system should be designed in a modular fashion that allows easy replacement or addition of payload, equipment, or sensors, to adapt to changing mission needs. |
| Consider the addition of redundant modules to increase reliability during flight/communications relay operations. | |
| The platform should be compatible with customization and open-source modules that can extend the platform’s performance range, allowing longer duration communication demonstrations and a wider range of experiments. | |
| Safety and reliability | Conduct a risk analysis to determine potential risk factors and consider collision detection and avoidance units to limit possible accidents with property or even humans. |
| Conduct extensive tests and verification of customized or experimental modules on the ground before conducting flight operations. | |
| Consider fault tolerance to prevent single-point failures by incorporating redundant power and navigation modules and implement failure recovery protocols such as emergency landing modes. | |
| Implement adaptive and recovery techniques to prevent or recover from disruption to the FSO link, respectively. | |
| Communication range & bandwidth | The UAV must have a constant and reliable RF communication link within the specified operational range to transmit flight control and commands, as well as feedback information, including GPS location/orientation, telemetry, and health status, all without interference from ambient signals. |
| The communication range must remain within regulated separation distance and operational altitudes at the chosen (non-segregated) flight location. | |
| Ease of use & maintenance | The UAV system must strive for a low-complexity design, with an intuitive, user-friendly interface that does not require an expert skill set, thus ensuring that the focus remains on the FSO communication relay mission. |
| Consider adopting an open-source approach that caters to vast commercial modules that can be integrated to ensure easy system modification and maintenance. | |
| Cost | Consider cost-effective commercial multi-rotor platforms that allow for upgrades and customization. Moreover, if the UAV is damaged beyond recovery, commercial platforms can be replaced to ensure the continuity of the relay project. |
| The cost-effectiveness of commercial platforms encourages the inclusion of extra platform nodes, allowing the system to be scaled up to an FSO relay network or swarm. | |
| SWaP | Conduct power/mass budget analysis to cater to the payload’s requirements and optimize the allocation to fit within the platform’s constraints. |
| Utilize miniaturized and lightweight components such as MEMS to maximize payload capacity and overall platform performance. | |
| Implement power management techniques to optimize power distribution and conservation. Consider alternatives like a power tether to increase operational time. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nzekwu, N.J.; Fernandes, M.A.; Fernandes, G.M.; Monteiro, P.P.; Guiomar, F.P. A Comprehensive Review of UAV-Assisted FSO Relay Systems. Photonics 2024, 11, 274. https://doi.org/10.3390/photonics11030274
Nzekwu NJ, Fernandes MA, Fernandes GM, Monteiro PP, Guiomar FP. A Comprehensive Review of UAV-Assisted FSO Relay Systems. Photonics. 2024; 11(3):274. https://doi.org/10.3390/photonics11030274
Chicago/Turabian StyleNzekwu, Nwanze J., Marco A. Fernandes, Gil M. Fernandes, Paulo P. Monteiro, and Fernando P. Guiomar. 2024. "A Comprehensive Review of UAV-Assisted FSO Relay Systems" Photonics 11, no. 3: 274. https://doi.org/10.3390/photonics11030274
APA StyleNzekwu, N. J., Fernandes, M. A., Fernandes, G. M., Monteiro, P. P., & Guiomar, F. P. (2024). A Comprehensive Review of UAV-Assisted FSO Relay Systems. Photonics, 11(3), 274. https://doi.org/10.3390/photonics11030274