



WiFi-Based Detection of Human Subtle Motion for Health Applications


Abstract
:
1. Introduction
2. Related Works
2.1. Wearable and Smart Devices
2.2. Computer-Vision-Based Methods
2.3. Wireless-Signal-Based Methods
3. Materials and Methods
3.1. Overview
3.2. Data Processing
3.3. Motion Quantification
3.4. Experiments and Evaluation
3.4.1. Experimental Setup
3.4.2. Evaluation and Verification
- a.
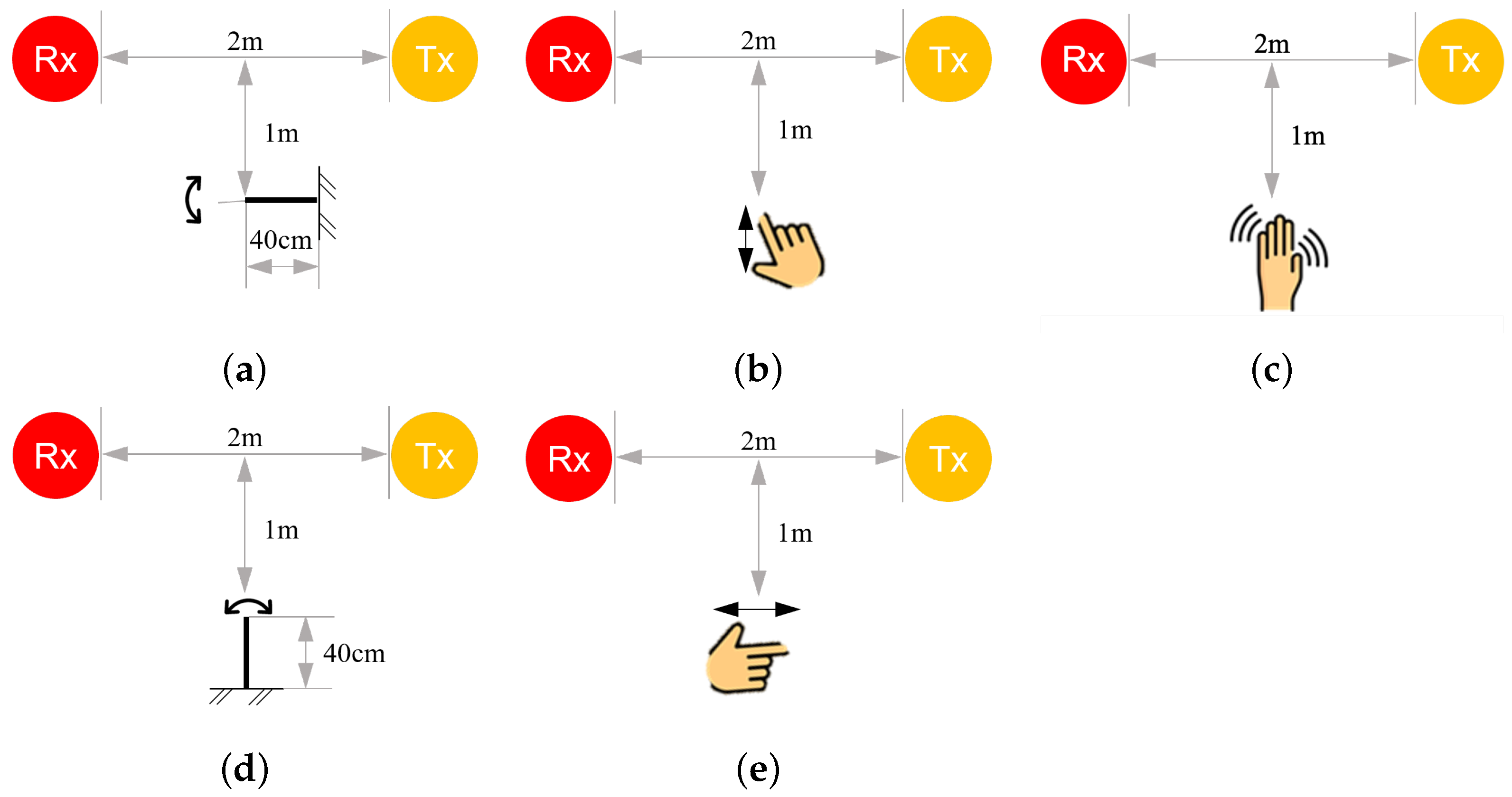
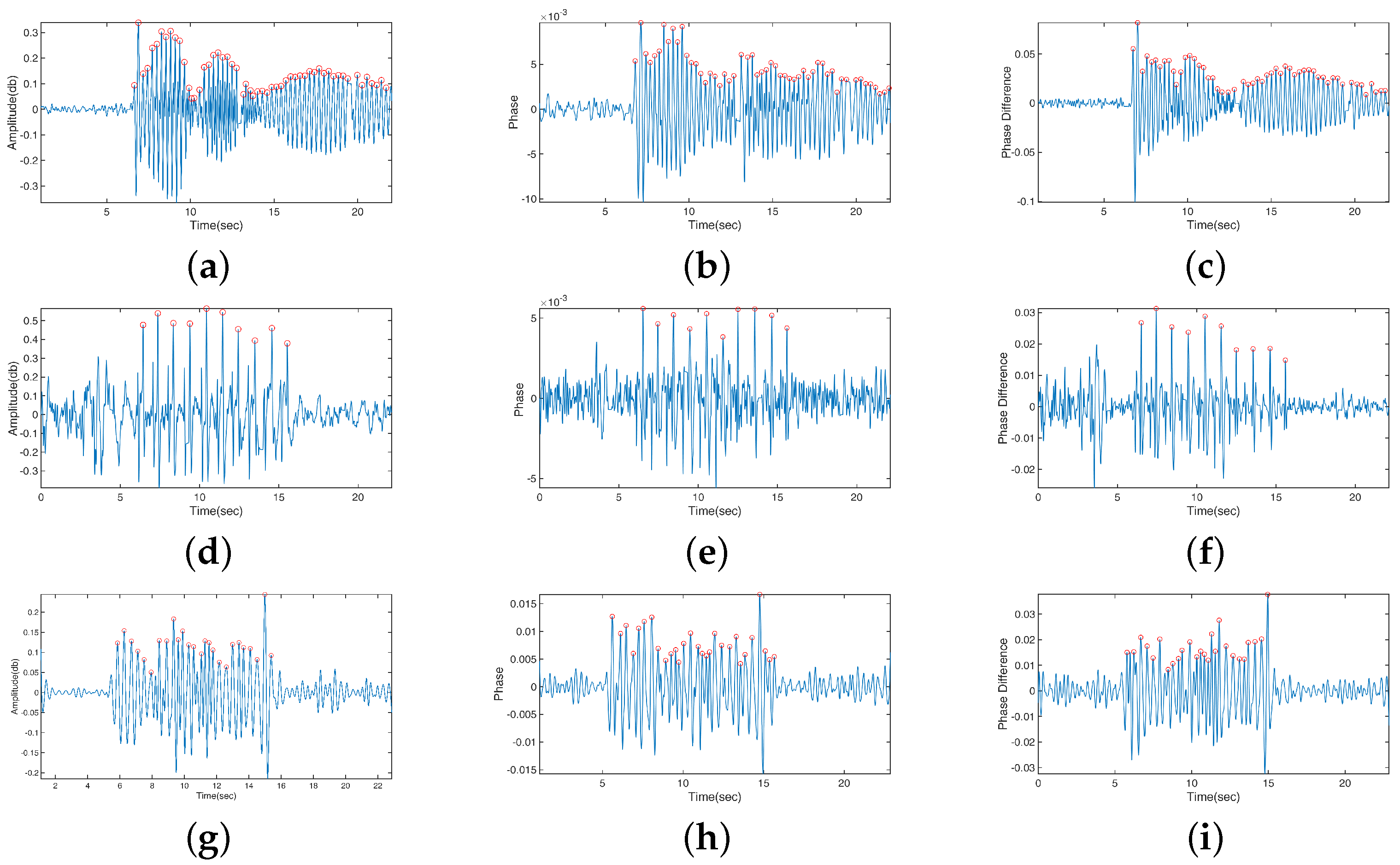
- Determine the basic signal for motion analysis: For the experimental deployment shown in Figure 4a–c, we examined the responses of basic signals, such as amplitude, phase, and phase difference, to determine which best captured the target motion. This scenario used the default settings, i.e., the target motion took place 1 m away from the midpoint of the LoS and was detected by a single WiFi link.
- b.
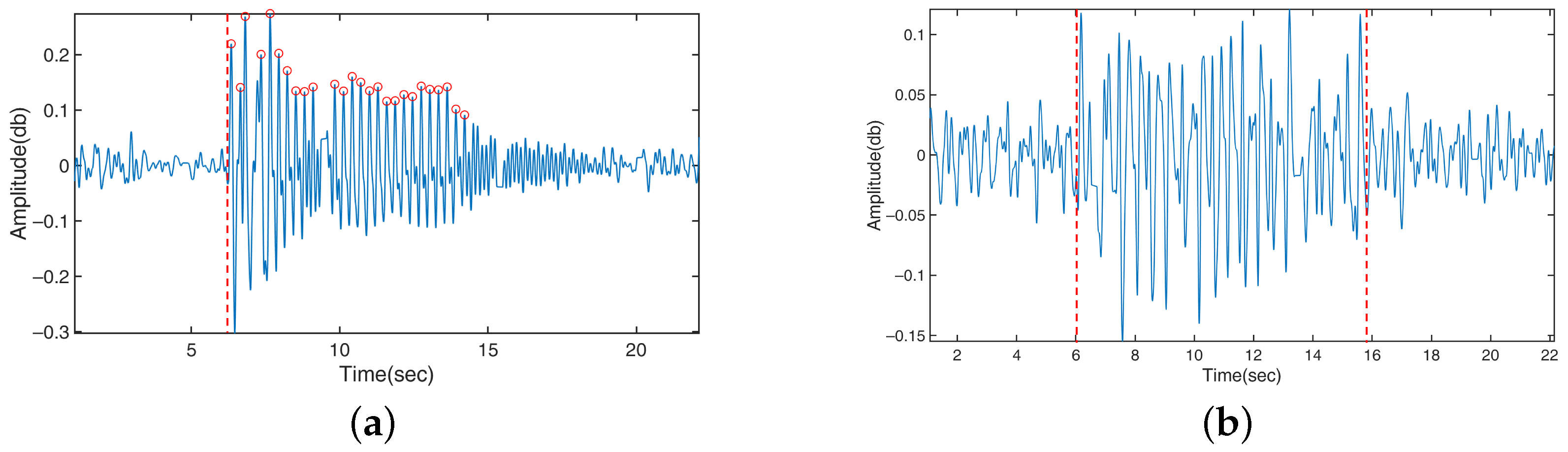
- Understand the directional effect of motion: We changed the direction of motion to be parallel to the LoS of the WiFi link (in such a case, the CSI variation would be minimal according to the Fresnel zone theory) and evaluated the sensing performance (Figure 4d,e). No change in the direction of motion was necessary for the resting tremor test as it involved motion in all directions. This scenario also used the default settings.
- c.
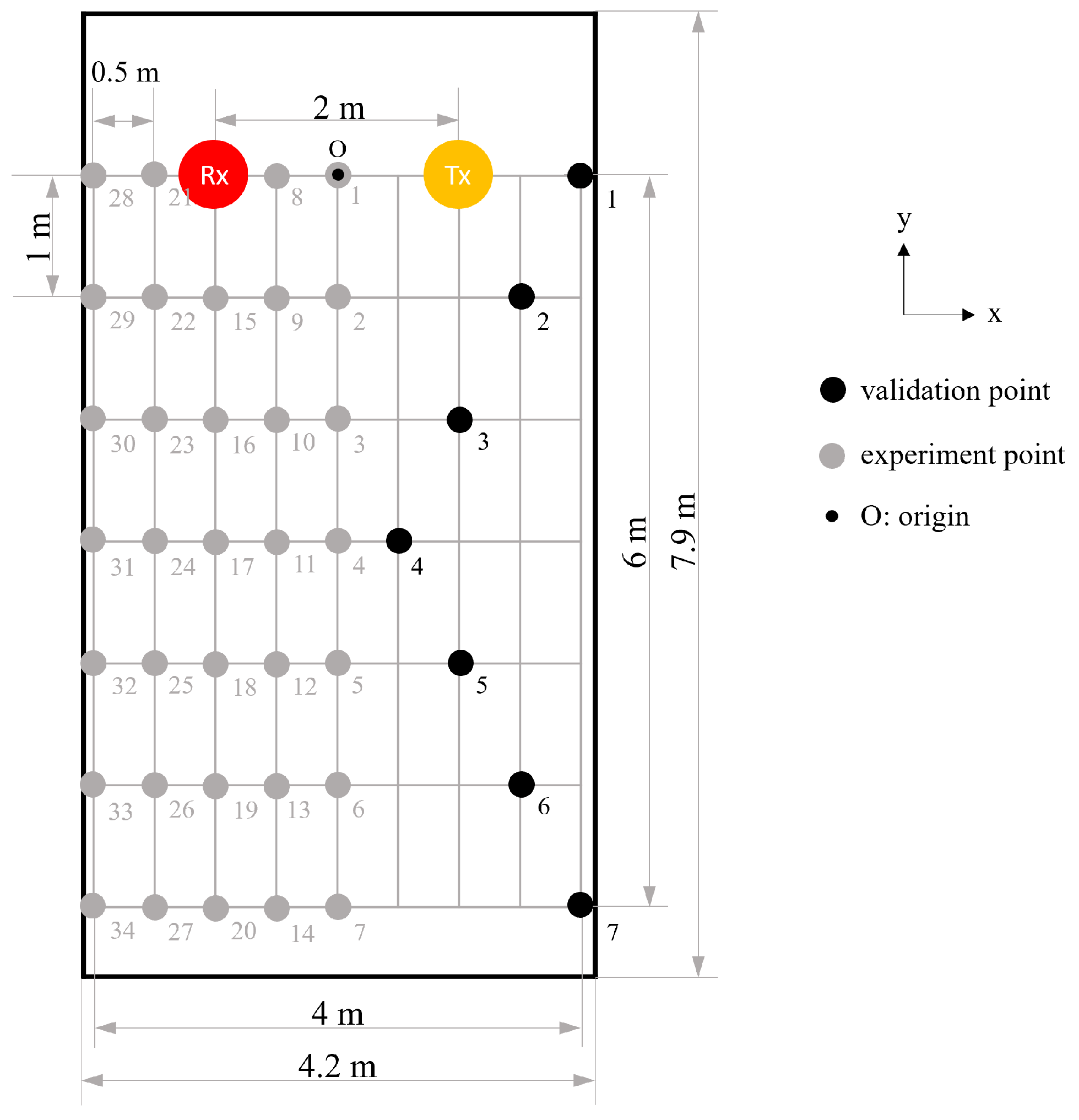
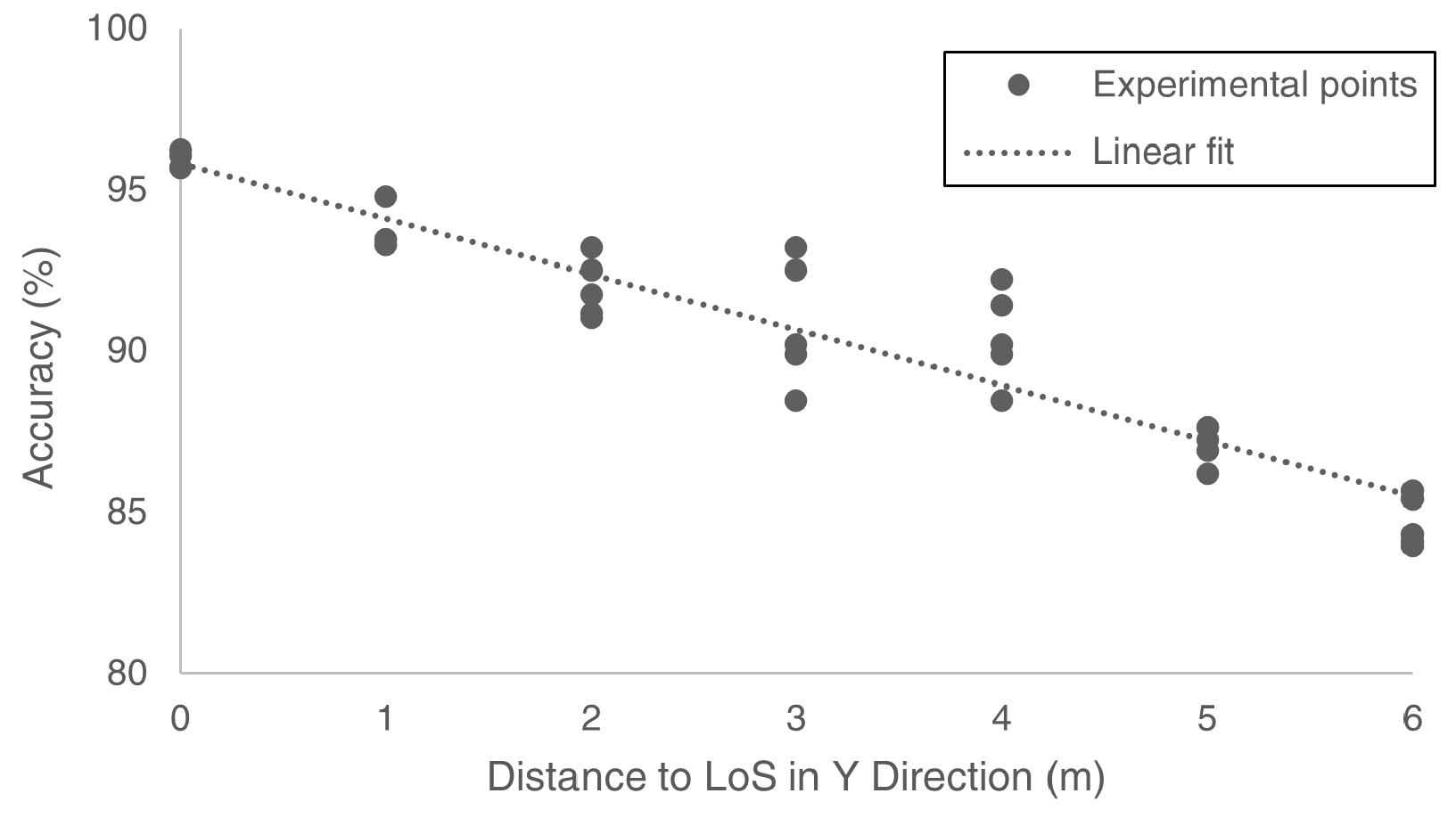
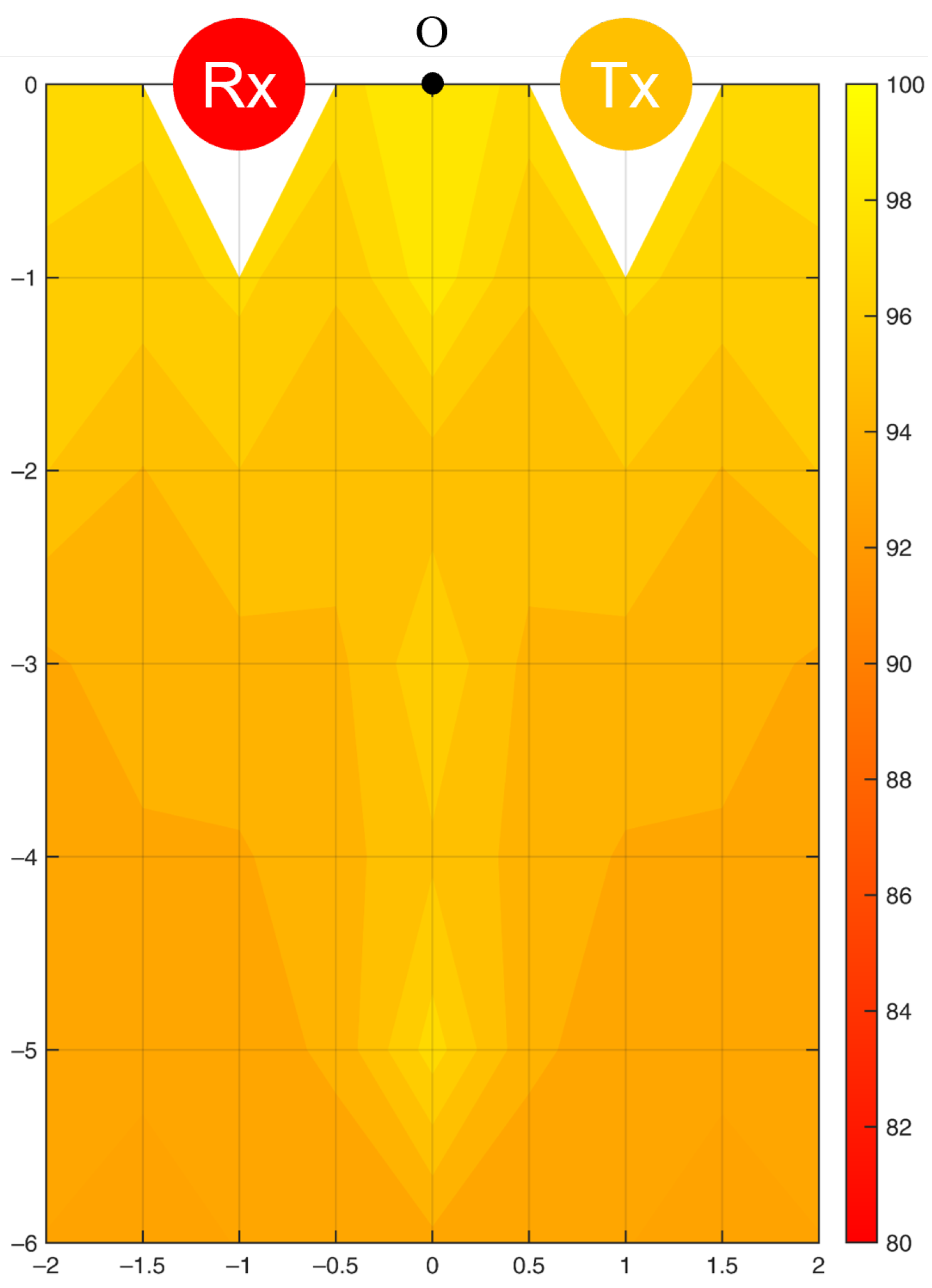
- Evaluate the sensing accuracy of a single WiFi link: With a single WiFi link arranged as in Figure 5, a healthy person, the only one in the room, imitated the hand resting tremor. By defining the midpoint of the LoS as the origin, the target motion was performed at 34 experimental points (gray dots) spread over the left-hand side of the room. These points were arranged on a square grid with a 1 m interval. The impact of X and Y distances between the location of motion and the origin on the sensing accuracy was studied. The results were used to establish a sensing accuracy model on the left-hand side of the room, which could be mapped to the other side of the room based on the symmetric property of the Fresnel zone (about the centerline of the LoS). To verify that, additional tests were performed at seven validation points (black dots) on the right-hand side of the room, and the results were compared with those obtained by the symmetric mapping. The test was repeated eight times at each experimental/validation point.
- d.
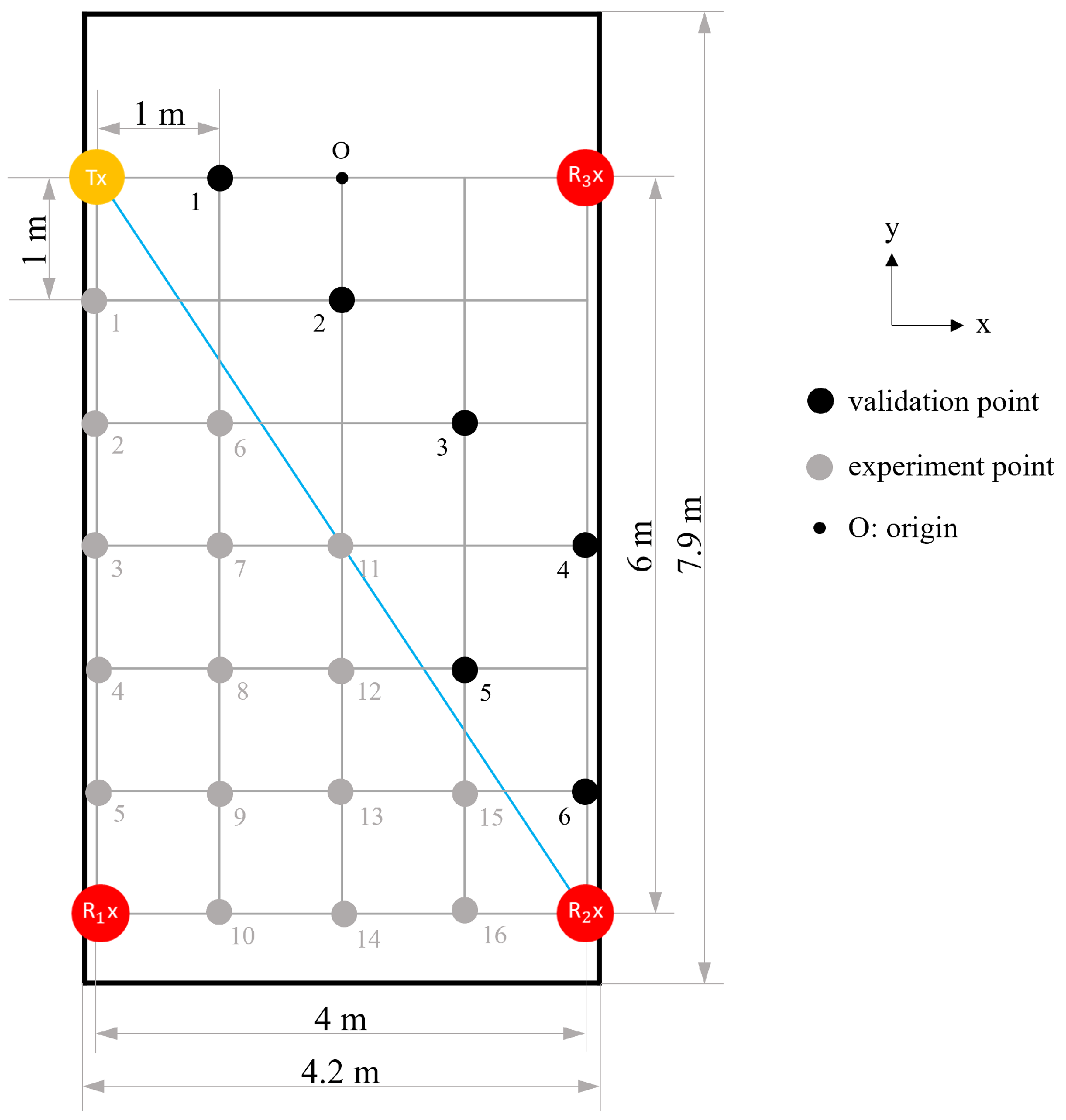
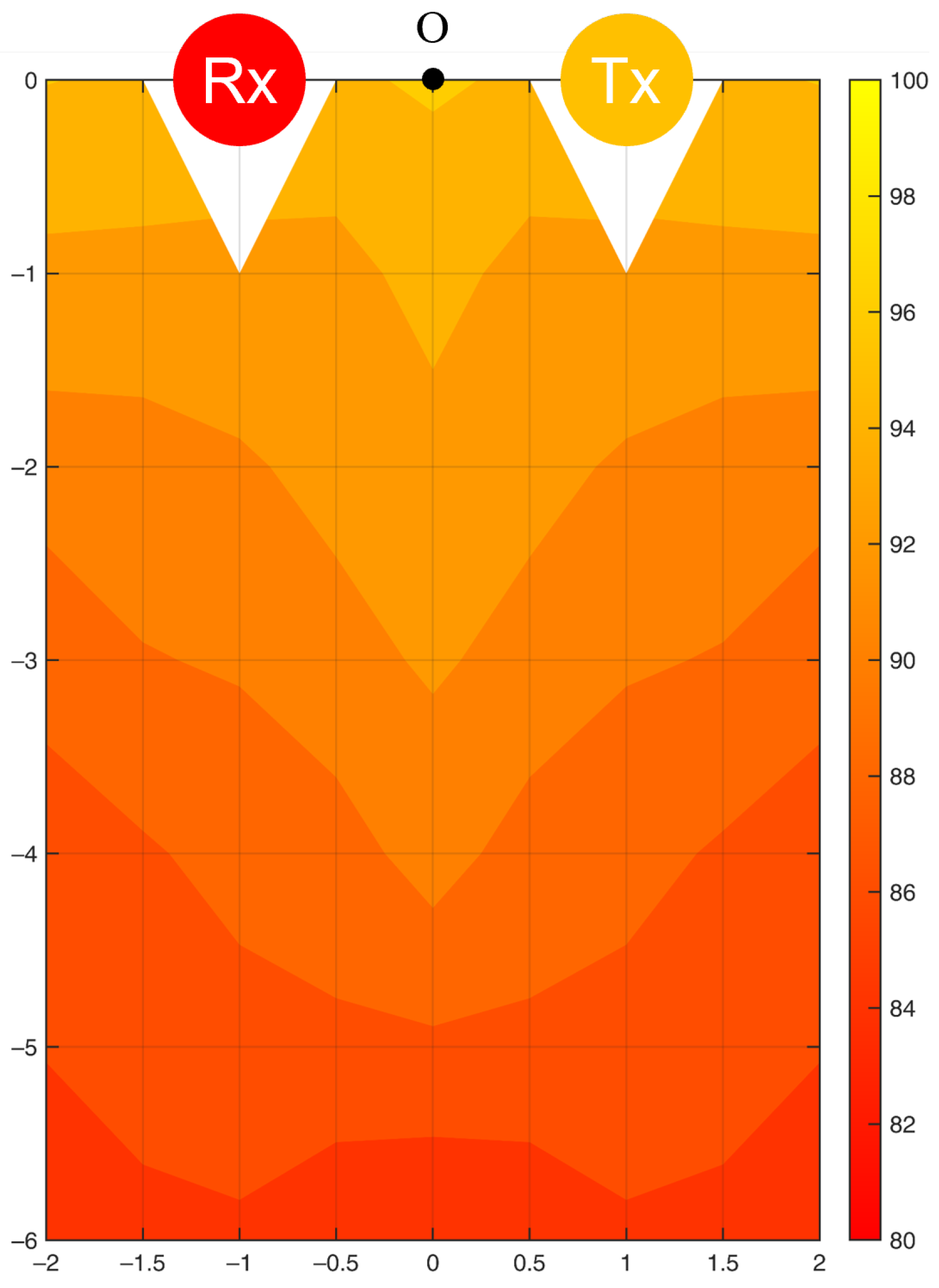
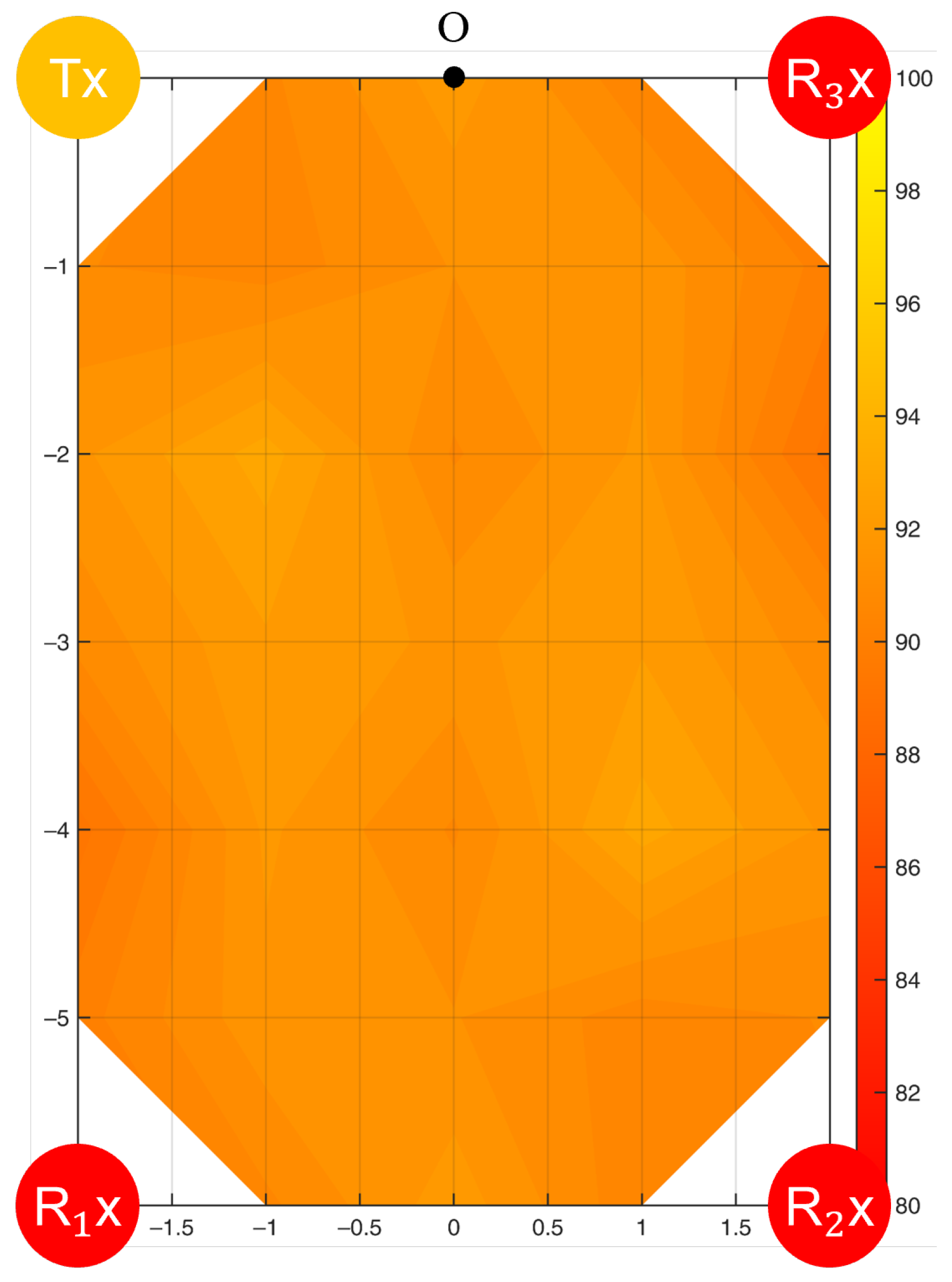
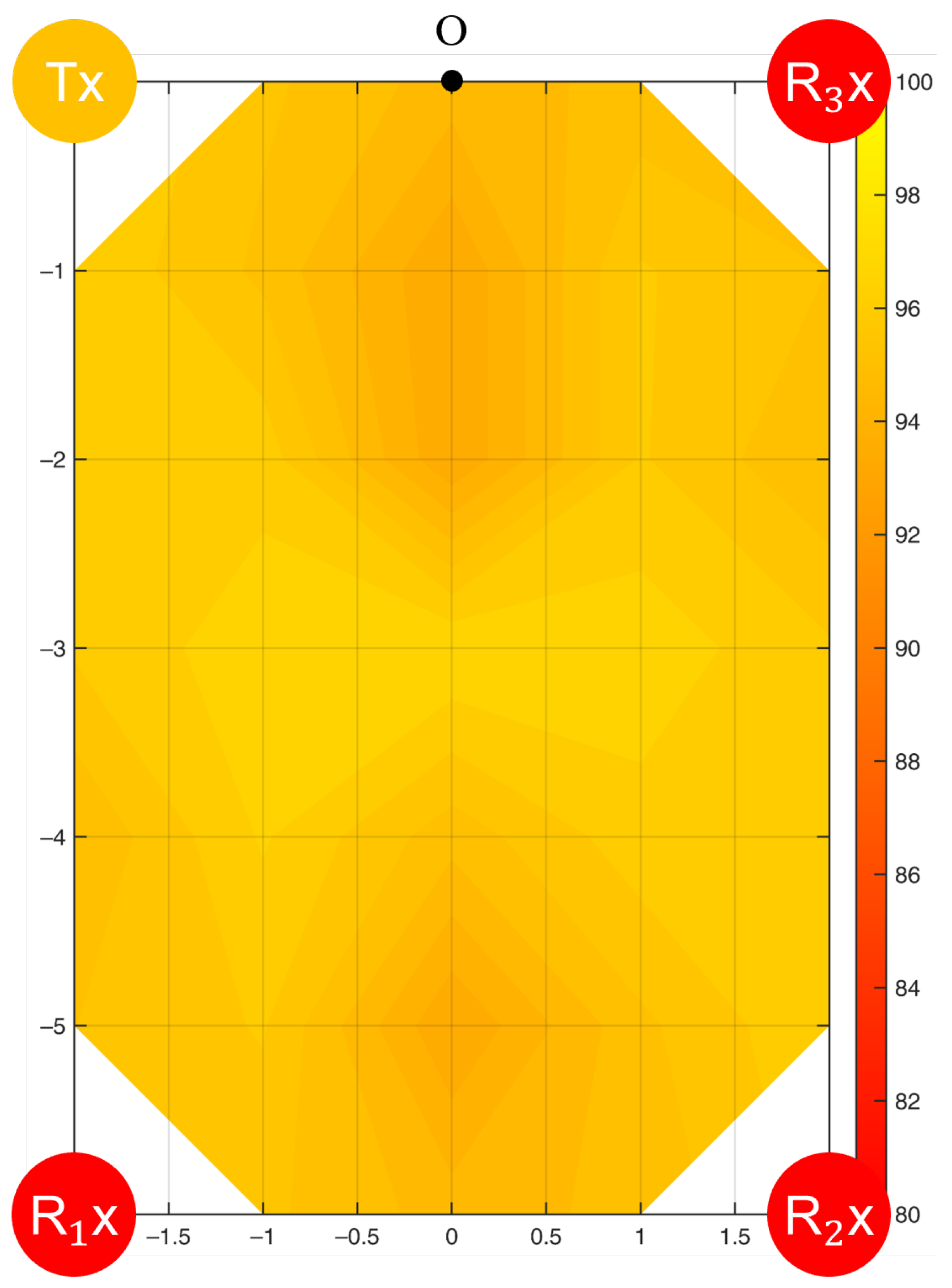
- Evaluate the sensing accuracy of multiple WiFi links: Similar to the scenario that evaluated a single WiFi link, the arrangement of WiFi devices changed to one Rx and three Txs at the four corners of the room (Figure 6). With the origin defined at the same position in the room, the target motion was performed at 16 experimental points (gray dots) spread over the lower-left triangle area of the room. Again, based on the symmetric property of the Fresnel zone, we created a sensing accuracy contour over the entire room by mapping the accuracy model of the lower-left triangle area to the upper-right triangle area. For verification purposes, additional tests were performed at six validation points (black dots) in the upper-right triangle area, and the results were compared with those obtained by the symmetric mapping. The test was performed eight times at each experimental/validation point.


4. Results
4.1. Scenario a: Best Basic Signal for Motion Analysis
4.2. Scenario b: Directional Effect of Motion
4.3. Scenario c: Sensing Accuracy of a Single WiFi Link
4.4. Scenario d: Sensing Accuracy of Multiple WiFi Links
5. Discussion
5.1. Limitations of Sensing
5.2. Performance of Sensing and Applicability
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qian, K.; Wu, C.; Zhang, Y.; Zhang, G.; Yang, Z.; Liu, Y. Widar2.0: Passive Human Tracking with a Single Wi-Fi Link. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services (MobiSys ’18), Munich, Germany, 10–15 June 2018; pp. 350–361. [Google Scholar]
- Wu, D.; Zhang, D.; Xu, C.; Wang, H.; Li, X. Device-free WiFi human sensing: From pattern-based to model-based approaches. IEEE Commun. Mag. 2017, 55, 91–97. [Google Scholar] [CrossRef]
- Zeng, Y.; Pathak, P.H.; Mohapatra, P. WiWho: WiFi-Based Person Identification in Smart Spaces. In Proceedings of the 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, 11–14 April 2016; pp. 1–12. [Google Scholar]
- Al-qaness, M.A.A.; Li, F.; Ma, X.; Zhang, Y.; Liu, G. Device-Free Indoor Activity Recognition System. Appl. Sci. 2016, 6, 329. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. WiFall: Device-Free Fall Detection by Wireless Networks. IEEE Trans. Mob. Comput. 2017, 16, 581–594. [Google Scholar] [CrossRef]
- Grandez, K.; Bustamante, P.; Solas, G.; Gurutzeaga, I.; García-Alonso, A. Wearable wireless sensor for the gait monitorization of Parkinsonian patients. In Proceedings of the 16th IEEE International Conference on Electronics, Circuits and Systems, Yasmine Hammamet, Tunisia, 13–16 December 2009; pp. 215–218. [Google Scholar]
- Niazmand, K.; Tonn, K.; Kalaras, A.; Kammermeier, S.; Boetzel, K.; Mehrkens, J.H.; Lueth, T.C. A measurement device for motion analysis of patients with Parkinson’s disease using sensor based smart clothes. In Proceedings of the 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, Dublin, Ireland, 23–26 May 2011; pp. 9–16. [Google Scholar]
- Holmes, J.; Jenkins, M.; Johnson, A.; Hunt, M.; Clark, R. Validity of the Nintendo Wii® balance board for the assessment of standing balance in Parkinson’s disease. Clin. Rehabil. 2013, 27, 361–366. [Google Scholar] [CrossRef]
- Bhat, G.; Deb, R.; Ogras, U.Y. OpenHealth: Open-Source Platform for Wearable Health Monitoring. IEEE Des. Test 2019, 36, 27–34. [Google Scholar] [CrossRef]
- Dranca, L.; Mendarozketa, L.; Goñi, A.; Illarramendi, A.; Gomez, I.; Alvarado, M.; Rodríguez-Oroz, M. Using Kinect to classify Parkinson’s disease stages related to severity of gait impairment. BMC Bioinform. 2018, 19, 471. [Google Scholar] [CrossRef]
- Zhu, W.; Anderson, B.; Zhu, S.; Wang, Y. A Computer Vision-Based System for Stride Length Estimation using a Mobile Phone Camera. In Proceedings of the 18th International ACM SIGACCESS Conference on Computers and Accessibility, Reno, NV, USA, 23–26 October 2016; pp. 121–130. [Google Scholar]
- Zhang, Z.; Ishida, S.; Tagashira, S.; Fukuda, A. Danger-Pose Detection System Using Commodity WiFi for Bathroom Monitoring. Sensors 2019, 19, 884. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi sensing with channel state information: A survey. ACM Comput. Surv. 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Yousefi, S.; Narui, H.; Dayal, S.; Ermon, S.; Valaee, S. A Survey on Behavior Recognition Using WiFi Channel State Information. IEEE Commun. Mag. 2017, 55, 98–104. [Google Scholar] [CrossRef]
- Wang, Z.; Hou, Y.; Dou, W.; Zhang, C.; Huang, Z.; Guo, Y. A Survey on Human Behavior Recognition Using Channel State Information. IEEE Access 2019, 7, 155986–156024. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Z.; Zhang, C.; Dou, W.; Guo, Y.; Chen, D. CSI-based human sensing using model-based approaches: A survey. J. Comput. Des. Eng. 2021, 8, 510–523. [Google Scholar] [CrossRef]
- Moustafa, A.A.; Chakravarthy, S.; Phillips, J.R.; Gupta, A.; Keri, S.; Polner, B.; Frank, M.J.; Jahanshahi, M. Motor symptoms in Parkinson’s disease: A unified framework. Neurosci. Biobehav. Rev. 2016, 68, 727–740. [Google Scholar] [CrossRef]
- Wu, D.; Zhang, D.; Xu, C.; Wang, Y.; Wang, H. WiDir: Walking direction estimation using wireless signals. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ’16), Heidelberg, Germany, 12–16 September 2016; pp. 351–362. [Google Scholar]
- Bächlin, M.; Plotnik, M.; Roggen, D.; Maidan, I.; Hausdorff, J.M.; Giladi, N.; Tröster, G. Wearable Assistant for Parkinson’s Disease Patients With the Freezing of Gait Symptom. IEEE Trans. Inf. Technol. Biomed. 2009, 14, 436–446. [Google Scholar] [CrossRef]
- Salarian, A.; Russmann, H.; Wider, C.; Burkhard, P.R.; Vingerhoets, F.J.; Aminian, K. Quantification of tremor and bradykinesia in Parkinson’s disease using a novel ambulatory monitoring system. IEEE Trans. Biomed. Eng. 2007, 54, 313–322. [Google Scholar] [CrossRef]
- LeMoyne, R.; Mastroianni, T.; Cozza, M.; Coroian, C.; Grundfest, W. Implementation of an iPhone for characterizing Parkinson’s disease tremor through a wireless accelerometer application. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 4954–4958. [Google Scholar]
- López-Blanco, R.; Velasco, M.A.; Méndez-Guerrero, A.; Romero, J.P.; Castillo, M.D.D.; Serrano, J.I.; Rocon, E.; Benito-León, J. Smartwatch for the analysis of rest tremor in patients with Parkinson’s disease. J. Neurol. Sci. 2019, 401, 37–42. [Google Scholar] [CrossRef]
- Khatsenko, K.; Khin, Y.; Maibach, H. Allergic Contact Dermatitis to Components of Wearable Adhesive Health Devices. Dermatitis 2020, 31, 283–286. [Google Scholar] [CrossRef]
- Kour, N.; Sunanda; Arora, S. Computer-Vision Based Diagnosis of Parkinson’s Disease via Gait: A Survey. IEEE Access 2019, 7, 156620–156645. [Google Scholar] [CrossRef]
- Pang, Y.; Christenson, J.; Jiang, F.; Lei, T.; Rhoades, R.; Kern, D.; Thompson, J.A.; Liu, C. Automatic detection and quantification of hand movements toward development of an objective assessment of tremor and bradykinesia in Parkinson’s disease. J. Neurosci. Methods 2020, 333, 108576. [Google Scholar] [CrossRef]
- Cho, C.W.; Chao, W.H.; Lin, S.H.; Chen, Y.Y. A vision-based analysis system for gait recognition in patients with Parkinson’s disease. Expert Syst. Appl. 2009, 36, 7033–7039. [Google Scholar] [CrossRef]
- Krupicka, R.; Szabo, Z.; Viteckova, S.; Ruzicka, E. Motion capture system for finger movement measurement in Parkinson disease. Radioengineering 2014, 23, 659–664. [Google Scholar]
- Agostino, R.; Currà, A.; Giovannelli, M.; Modugno, N.; Manfredi, M.; Berardelli, A. Impairment of individual finger movements in Parkinson’s disease. Mov. Disord. 2003, 18, 560–565. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.; Huang, Y.; Chen, J.; Lee, C. Improving Automatic Tremor and Movement Motor Disorder Severity Assessment for Parkinson’s Disease with Deep Joint Training. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Berlin, Germany, 23–27 July 2019; pp. 3408–3411. [Google Scholar]
- Ghosh, A.; Sanyal, A.; Chakraborty, A.; Sharma, P.K.; Saha, M.; Nandi, S.; Saha, S. On automatizing recognition of multiple human activities using ultrasonic sensor grid. In Proceedings of the 9th International Conference on Communication Systems and Networks, Bengaluru, India, 4–8 January 2017; pp. 488–491. [Google Scholar]
- Liakat, S.; Bors, K.; Xu, L.; Woods, C.; Doyle, J.; Gmachl, C. Noninvasive in vivo glucose sensing on human subjects using mid-infrared light. Biomed. Opt. Express 2014, 5, 2397–2404. [Google Scholar] [CrossRef] [PubMed]
- Fan, L.; Li, T.; Yuan, Y.; Katabi, D. In-Home Daily-Life Captioning Using Radio Signals. arXiv 2020, arXiv:2008.10966. [Google Scholar]
- Shi, S.; Sigg, S.; Ji, Y. Joint localization and activity recognition from ambient FM broadcast signals. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 521–530. [Google Scholar]
- Zhong, Y.; Zhou, Z.; Jiang, T. The Recognition of Human Activities Under UWB Communication. In Proceedings of the Third International Conference on Communications, Signal Processing, and Systems, Hohhot, China, 14–15 July 2014; p. 471. [Google Scholar]
- Depatla, S.; Mostofi, Y. Crowd Counting through Walls Using WiFi. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications, Athens, Greece, 19–23 March 2018; pp. 1–10. [Google Scholar]
- Wang, Z.; Guo, B.; Yu, Z.; Zhou, X. Wi-Fi CSI-Based Behavior Recognition: From Signals and Actions to Activities. IEEE Commun. Mag. 2018, 56, 109–115. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: Device-free location-oriented activity identification using fine-grained WiFi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking (MobiCom’14), Maui, HI, USA, 7–11 September 2014; pp. 617–628. [Google Scholar]
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking (MobiCom ’07), Montréal, QC, Canada, 9–14 September 2007; pp. 222–229. [Google Scholar]
- Zhang, J.; Wei, B.; Hu, W.; Kanhere, S.S. WiFi-ID: Human Identification Using WiFi Signal. In Proceedings of the 2016 International Conference on Distributed Computing in Sensor Systems (DCOSS), Washington, DC, USA, 26–28 May 2016; pp. 75–82. [Google Scholar]
- Li, H.; Yang, W.; Wang, J.; Xu, Y.; Huang, L. WiFinger: Talk to your smart devices with finger-grained gesture. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp ’16), Heidelberg, Germany, 12–16 September 2016; pp. 250–261. [Google Scholar]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L.M. We Can Hear You with Wi-Fi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Lin, Z.; Xie, Y.; Guo, X.; Ren, Y.; Chen, Y.; Wang, C. WiEat: Fine-grained Device-free Eating Monitoring Leveraging Wi-Fi Signals. In Proceedings of the 29th International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 3–6 August 2020; pp. 1–9. [Google Scholar]
- Zeng, Y.; Wu, D.; Xiong, J.; Yi, E.; Gao, R.; Zhang, D. FarSense: Pushing the Range Limit of WiFi-based Respiration Sensing with CSI Ratio of Two Antennas. In Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, London, UK, 11–13 September 2019; Volume 3, pp. 1–26. [Google Scholar]
- Mo, H.; Kim, S. A Deep Learning-Based Human Identification System with Wi-Fi CSI Data Augmentation. IEEE Access 2021, 9, 91913–91920. [Google Scholar] [CrossRef]
- Zhang, F.; Niu, K.; Xiong, J.; Jin, B.; Gu, T.; Jiang, Y.; Zhang, D. Towards a diffraction-based sensing approach on human activity recognition. ACM Interact. Mob. Wearable Ubiquitous Technol. 2019, 3, 1–25. [Google Scholar] [CrossRef]
- Soltanaghaei, E.; Kalyanaraman, A.; Whitehouse, K. Peripheral WiFi vision: Exploiting multipath reflections for more sensitive human sensing. In Proceedings of the 4th International on Workshop on Physical Analytics, Niagara Falls, NY, USA, 23 June 2017; pp. 13–18. [Google Scholar]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and Modeling of WiFi Signal Based Human Activity Recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking (MobiCom ’15), Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Yang, X.; Shah, S.A.; Ren, A.; Zhao, N.; Zhang, Z.; Fan, D.; Zhao, J.; Wang, W.; Ur-Rehman, M. Freezing of gait detection considering leaky wave cable. IEEE Trans. Antennas Propag. 2018, 67, 554–561. [Google Scholar] [CrossRef]
- Shah, S.A.; Yang, X.; Abbasi, Q.H. Cognitive health care system and its application in pill-rolling assessment. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2632. [Google Scholar] [CrossRef]
- Butterworth, S. On the Theory of Filter Amplifiers. Exp. Wirel. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- BMJ Evaluation of Tremor. Available online: https://bestpractice.bmj.com/topics/en-us/974 (accessed on 7 December 2022).
- Bachu, R.G.; Kopparthi, S.; Adapa, B.; Barkana, B.D. Voiced/Unvoiced Decision for Speech Signals Based on Zero-Crossing Rate and Energy. Adv. Tech. Comput. Sci. Softw. Eng. 2010, 2, 279–282. [Google Scholar]
- Savitzky, A.; Golay, M.J. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Sen, S.; Radunović, B.; Choudhury, R.R.; Minka, T. You are facing the Mona Lisa:spot localization using PHY layer information. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay Lake District, UK, 25–29 June 2012; pp. 183–196. [Google Scholar]
- Neter, J.; Kutner, M.H.; Nachtsheim, C.J.; Wasserman, W. Applied Linear Statistical Models; The McGraw-Hill Companies, Inc.: New York, NY, USA, 1996. [Google Scholar]
- Wang, H.; Zhang, D.; Ma, J.; Wang, Y.; Wang, Y.; Wu, D.; Gu, T.; Xie, B. Human respiration detection with commodity wifi devices: Do user location and body orientation matter? In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 25–36. [Google Scholar]
- Surangsrirat, D.; Sri-iesaranusorn, P.; Chaiyaroj, A.; Vateekul, P.; Bhidayasiri, R. Parkinson’s disease severity clustering based on tapping activity on mobile device. Sci. Rep. 2022, 12, 3142. [Google Scholar] [CrossRef]
- Goetz, C.; Tilley, B.; Shaftman, S.; Stebbins, G.; Fahn, S.; Martinez-Martin, P.; Poewe, W.; Sampaio, C.; Stern, M.; Dodel, R.; et al. MDS-Unified Parkinson’s Disease Rating Scale (MDS-UPDRS); International Parkinson and Movement Disorder Society: Milwaukee, WI, USA, 2019; Available online: https://www.movementdisorders.org/MDS/MDS-Rating-Scales/MDS-Unified-Parkinsons-Disease-Rating-Scale-MDS-UPDRS.htm (accessed on 24 October 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Processing Procedure | Parameter |
|---|---|
| Butterworth filter | Finger tapping: n = 3 = 1 Hz, = 10 Hz = [2.1378, 0, −6.4133, 0, 6.4133, 0, −2.1378] = [1, −5.8858, 14.4363, −18.8875, 13.9021, −5.4582, 0.8931] Rest tremor: n = 3 = 3 Hz, = 6 Hz = [0.8216, 0, −2.4648, 0, 2.4659, 0, −0.8216] = [1, −5.9602, 14.8038, −19.6133, 14.6189, −5.8123, 0.9630] |
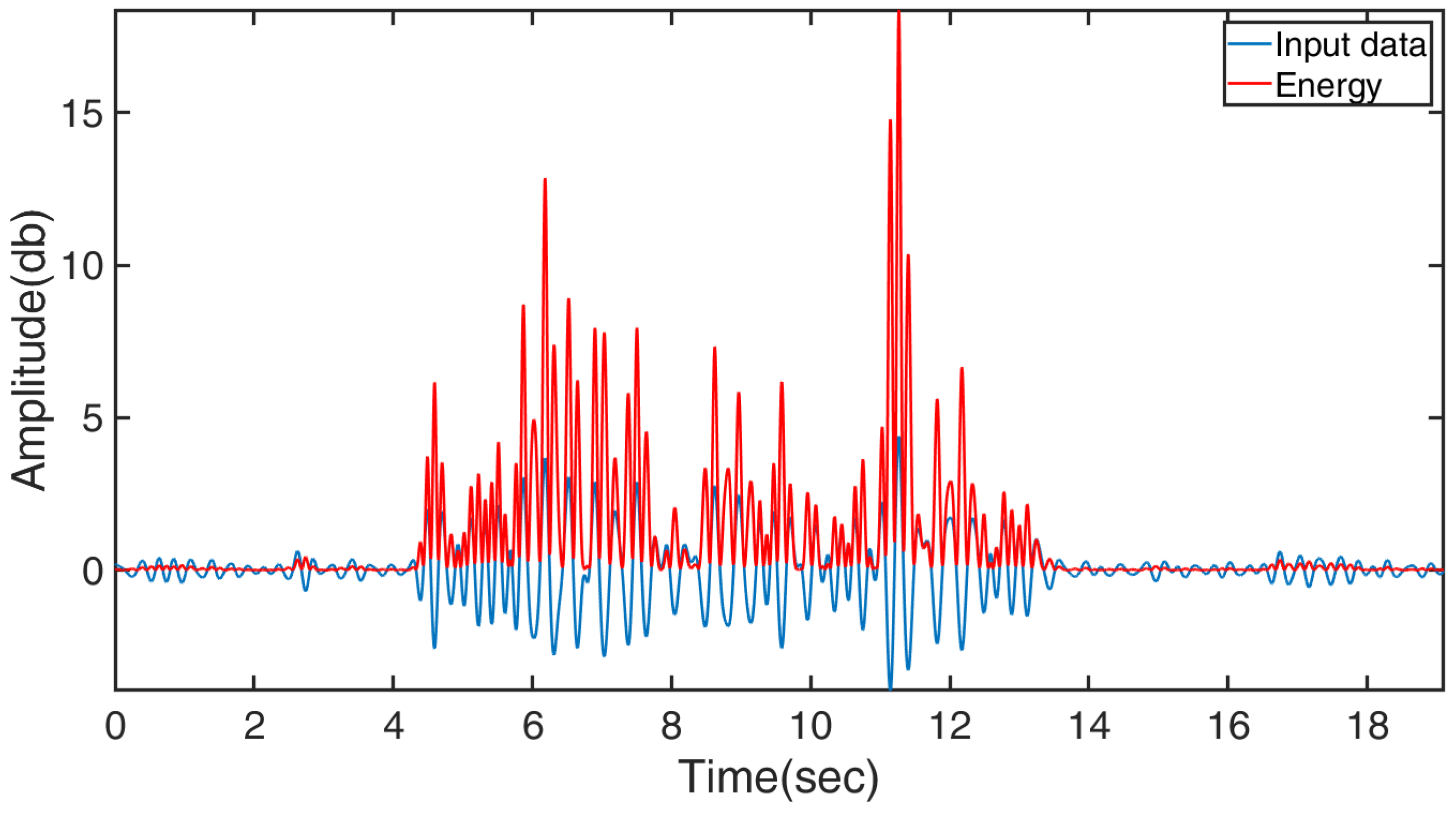
| Short-time energy threshold segmentation | N = 51 |
| Savitzky–Golay smoothing filter | n = 3 m = 101 |
| Target Motion | Characteristics of Motion |
|---|---|
| Steel Ruler Vibration | The ruler with a sensor (MetaMotionC, MBIENTLAB Inc., San Francisco, CA, USA) attached to one end oscillates with a 10 cm initial displacement and decreases its amplitude over time until it returns to the static condition. The signal of motion is a sine wave that gradually decays until the motion becomes too small to be detectable. The frequency of oscillation measured by the sensor was 3.46 Hz. |
| Finger Tapping | A person repeatedly taps the tip of the index finger against the tip of the thumb at approximately 1 Hz. The signal of motion shows a strong impulse at each tap, but lower responses during the movements of fingers. |
| Hand Resting Tremor | A person moves the palm back and forth about the axis of the arm by rotating the wrist with random frequencies in the range of 3–6 Hz. The signal of motion is similar to oscillations with irregular intervals. The signal strength should be higher than finger tapping as the motion is larger. |
| a | b | c | d | |
|---|---|---|---|---|
| Tx-Rx arrangement | Single link | Single link | Single link | Multiple links |
| Tx/Rx (no. of devices, no. of antennas for each device) | (1,2)/(1,3) | (1,2)/(1,3) | (1,2)/(1,3) | (1,2)/(3,1) |
| Carrier frequency | 5 GHz | 5 GHz | 5 GHz | 5 GHz |
| Bandwidth | 20 MHz | 20 MHz | 20 MHz | 20 MHz |
| Sampling rate | 1000 Hz | 1000 Hz | 1000 Hz | 1000 Hz |
| Number of CSI streams | 6 | 6 | 6 | 6 |
| Number of CSI subcarrier per stream | 30 | 30 | 30 | 30 |
| Transmit/Receive mode | Receive mode | Receive mode | Receive mode | Receive mode |
| Target motion | RV, FT, RT Figure 4a–c | RV, FT Figure 4a,b,d,e | RT Figure 4c | RT Figure 4c |
| Distance between target motion and LoS | 1 m | 1 m | X: 0–4 m, Y: 0–6 m | X: 0–4 m, Y: 0–6 m |
| Length for each data sequence of motion | 20 s | 20 s | 20 s | 20 s |
| Number of data samples in each sequence of motion | 1000 × 20 | 1000 × 20 | 1000 × 20 | 1000 × 20 |
| Number of data sequences collected for each type of target motion | 8 | 8 | 8 | 8 |
| Motion Type | Steel Ruler Vibration | Finger Tapping | Resting Tremor | |||
|---|---|---|---|---|---|---|
| Direction to LoS | Perp. | Hori. | Perp. | Hori. | ||
| Duration | - | - | 98.7% | 97.6% | 97.3% | |
| Frequency | 96.2% | 86.4% | 98.7% | - | 91.7% | |
| CSI Amplitude | CSI Ratio | |
|---|---|---|
| Duration | 98.7 ± 1.3% | 96.5 ± 0.8% |
| Frequency | 94.2 ± 3.3% | 97.6 ± 2.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.-H.; Lin, C.-L.; Chang, C.-H. WiFi-Based Detection of Human Subtle Motion for Health Applications. Bioengineering 2023, 10, 228. https://doi.org/10.3390/bioengineering10020228
Chen H-H, Lin C-L, Chang C-H. WiFi-Based Detection of Human Subtle Motion for Health Applications. Bioengineering. 2023; 10(2):228. https://doi.org/10.3390/bioengineering10020228
Chicago/Turabian StyleChen, Hui-Hsin, Chi-Lun Lin, and Chun-Hsiang Chang. 2023. "WiFi-Based Detection of Human Subtle Motion for Health Applications" Bioengineering 10, no. 2: 228. https://doi.org/10.3390/bioengineering10020228
APA StyleChen, H. -H., Lin, C. -L., & Chang, C. -H. (2023). WiFi-Based Detection of Human Subtle Motion for Health Applications. Bioengineering, 10(2), 228. https://doi.org/10.3390/bioengineering10020228