1. Introduction
Doubly-diffusive systems in which two components with different diffusivities contribute to buoyancy in opposite ways arise frequently in geophysics and astrophysics [
1,
2,
3]: for example, heat and salt contribute to the stratification in the oceanic setting, while heat and chemical composition contribute in stellar astrophysics and sugar and salt in laboratory experiments. In the following, motivated by oceanic dynamics, we refer to the slowly-diffusing component as salinity and to the rapidly-diffusing component as temperature. Under appropriate conditions, the different diffusivities of these two components may destabilize an otherwise stably-stratified configuration and, hence, lead to mixing. Two scenarios are possible. In the first, temperature stratification is stabilizing, but the salinity stratification is destabilizing, a configuration that leads to a fingering instability. In the second scenario, where the salinity stratification is stabilizing while the temperature is destabilizing, a diffusive oscillatory instability called overstability may take place. In both of these cases, instability is present because heat diffuses more rapidly than a typical solute, i.e., the ratio
τ of the solute diffusivity to thermal diffusivity (or inverse Lewis number) satisfies
. In this paper, we concentrate on the nonlinear properties of the turbulent state arising in the former case and suppose that the destabilizing effect is provided by an unstable salt stratification as frequently occurs in the oceans, focusing on the case
.
Linear stability properties of the salt-finger regime were first determined by Stern [
4]. As the magnitude of the unstable mode grows, secondary instabilities are triggered [
5] and, finally, lead to a statistically steady state [
6,
7,
8]. However, the physical processes behind the presence of such an equilibrium state are still incompletely understood. Stern [
9] has suggested that a collective instability can lead to the disruption of the salt-finger field and lead to saturation and identified a dimensionless quantity, now called the Stern number, that can be used as a criterion for saturation. Others have supposed that saturation will arise once the growth rate of a secondary instability, such as that identified in [
5], becomes comparable to that of the salt-finger instability itself [
8,
10]. More recently Shen [
6] has suggested that finger collision plays an essential role because of the generation of large vertical gradients and, hence, strong dissipation. In an interesting paper, Paparella and von Hardenberg [
11] proposed a saturation mechanism based on finger clustering that leads to the generation of large-scale structures and, hence, to saturation at the large scale.
Except for weakly nonlinear approaches, e.g., [
7,
12], most researchers employ numerical studies of the primitive equations consisting of the Navier–Stokes equation coupled to scalar equations for heat and salinity transport. Such studies, particularly in three dimensions, have proven invaluable and identified a number of novel processes, e.g., [
13]. To shed light on some of these, we propose here a systematic procedure that leads to a simplified set of equations that is easier to study, both theoretically and numerically. In the following, we refer to these, following [
14], as reduced equations. The procedure described below has been used before [
15,
16,
17] and focuses on the double limit of a large density ratio, where the stratification is dominated by thermal contributions, and an asymptotically small diffusivity ratio, where salinity diffuses much more slowly than heat. The latter is motivated by the small value of the diffusivity ratio in the ocean while large density ratios are observed in fingering layers in experiments [
18] and in some oceanic measurements [
19], and is a limit beyond the current capability of direct numerical simulations. Two reduced models are derived depending on the order of the Schmidt number
, which captures the relative importance of momentum and salinity diffusion. When these two effects are comparable,
, a reduced model that bears similarity to the Rayleigh–Bénard configuration is derived. This model is applicable to astrophysical objects, e.g., [
10,
17,
20]. In the oceanic parameter regime with fast momentum diffusion,
, we derive a reduced model with a prognostic-diagnostic form, which we refer to as the inertia-free salt convection model. This model is the main topic of this paper.
It turns out that this model already appears in the work of Radko and Stern [
16]. However, beyond one three-dimensional simulation in a very small aspect ratio domain, these authors did not investigate the properties of this model. We believe in fact that the model merits far greater attention and that it correctly captures the saturation of the salt-finger instability and the resulting transport properties in a physically-relevant regime. In this paper, we therefore study the properties of this model at some length, albeit in two dimensions. To do so, we employ a doubly-periodic setting as appropriate for oceanic and astrophysical applications with distant boundaries, in contrast to earlier studies of salt-finger convection in vertically-bounded domains, e.g., [
21,
22,
23,
24,
25]. In this formulation, elevator modes consisting of vertically-invariant upward and downward moving fingers are exact nonlinear solutions, and we believe that analogous modes are crucial even in vertically-bounded domains because of their efficiency in extracting energy from the salinity field. We mention that the two-dimensional model we study is expected to capture the dynamics of the three-dimensional system for
Prandtl numbers and sufficiently large density ratios [
26], but not for low Prandtl numbers for which simulations of the two-dimensional and three-dimensional primitive equations lead to qualitatively different predictions [
27].
The structure of this paper is as follows. In
Section 2, we formulate the salt-finger convection problem, followed in
Section 3 by a derivation of two distinct reduced models valid for finite and infinite Schmidt numbers, respectively. The time evolution and the properties of the saturated state of the latter are studied in
Section 4 and
Section 5 through a combination of numerical simulation and scaling analysis. Our results are summarized in
Section 6. Two appendices, one summarizing the dependence of the results on the domain size and the other an analytical approximation to one of the saturation regimes, complete the paper.
5. Saturated States in the Inertia-Free Salt Convection Model
In large domains (i.e., for large thermal Rayleigh numbers
, cf. Equation (
10)), the IFSC model (20) reaches domain size-independent statistically steady states, whose statistical properties depend on the Rayleigh ratio
. In this section, we study this
dependence, since this is crucial for a sound parameterization of small-scale salt-fingering convection and its effect on large-scale fields. Global quantities—available potential energy and flux—are studied in
Section 5.1, where we identify two distinct regimes according to their dependence on
. The corresponding probability density functions are shown in
Section 5.2.
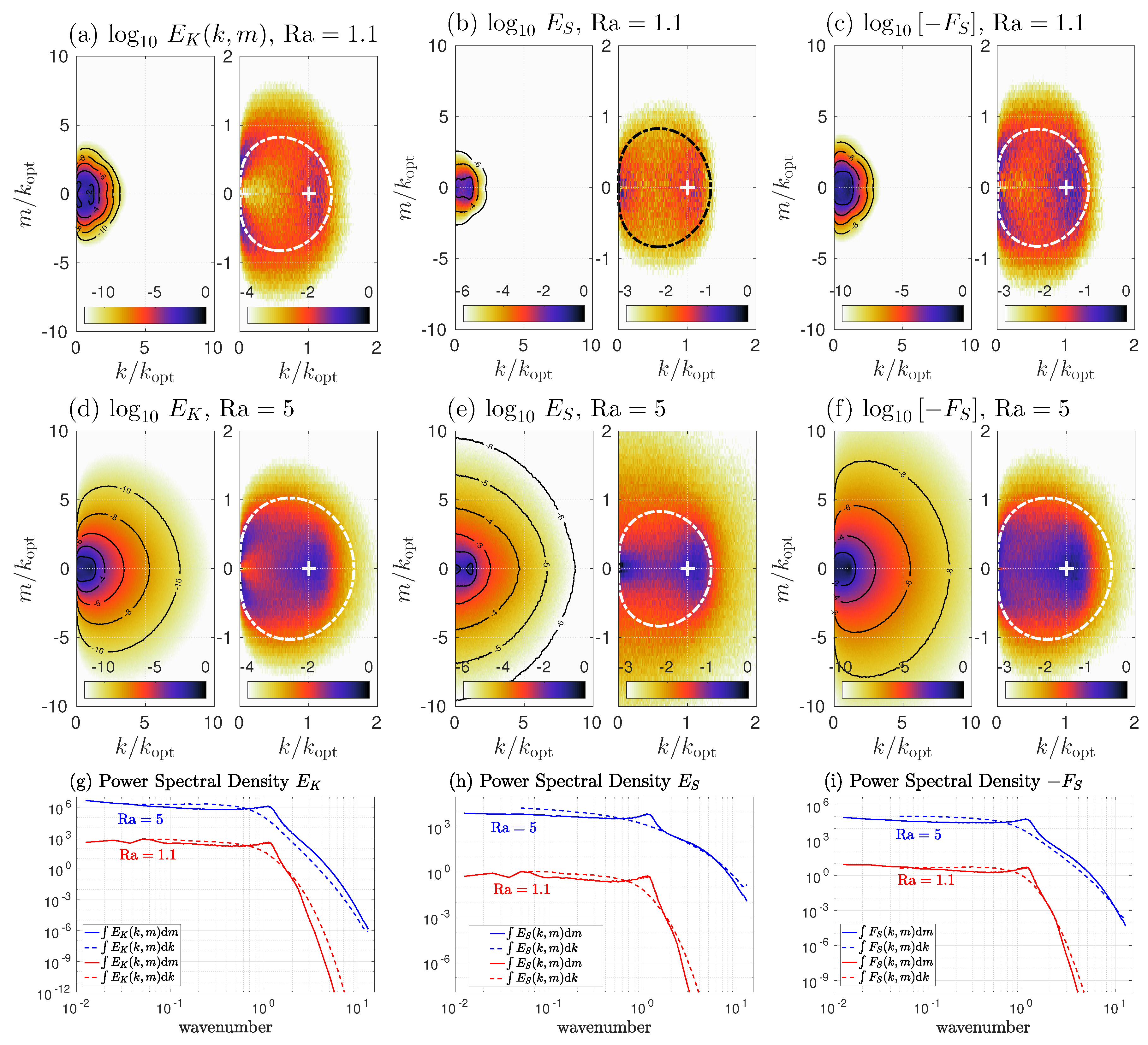
Figure 6 shows the spectral density of kinetic energy (first column), salinity potential energy (second column) and salinity flux (third column) in the statistically stationary state as a function of the horizontal wavenumber
k and the vertical wavenumber
m (top two rows). The third row shows the corresponding integrated spectra along the vertical (plain lines) and horizontal (dashed lines) directions, plotted as a function of the horizontal and vertical wavenumber, respectively. One distinguishing feature of the vertically-integrated spectra is that they peak around the optimal wavenumber
. Away from the peak, the vertically-integrated spectra increase weakly for wavenumbers below
, but fall off rapidly for wavenumbers larger than this energy injection wavenumber. Similar tendencies are also observed in the horizontally-integrated spectra. In both cases this fall-off is more rapid for smaller
(
) than for larger
(
). Of particular interest is the fact that energy is transferred to ever larger scales and in fact appears to peak at these scales. We surmise that this is a consequence of the patchiness of the saturated state (
Figure 5c), a property that is also observed in three-dimensional simulations of the primitive equations [
11].
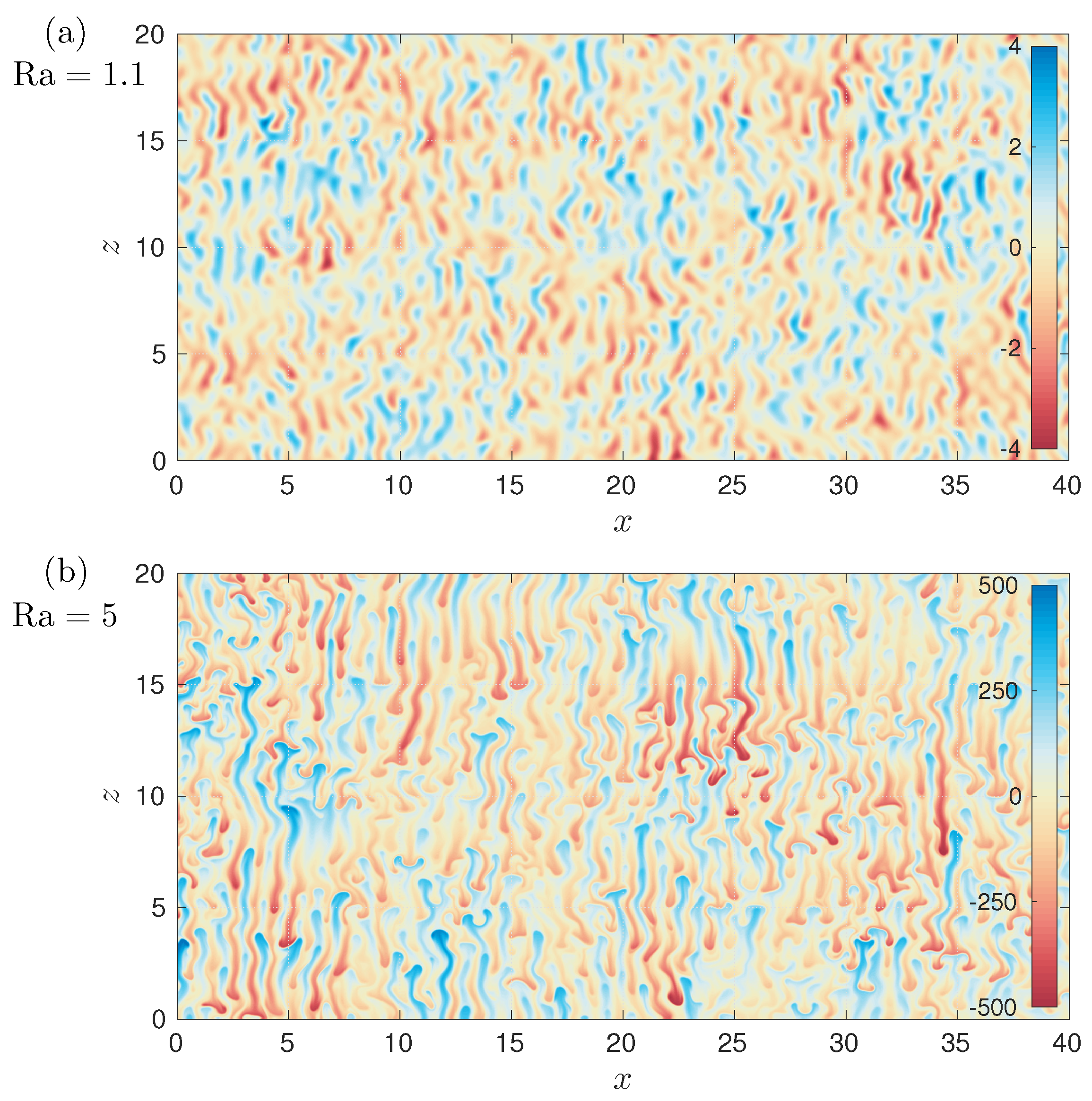
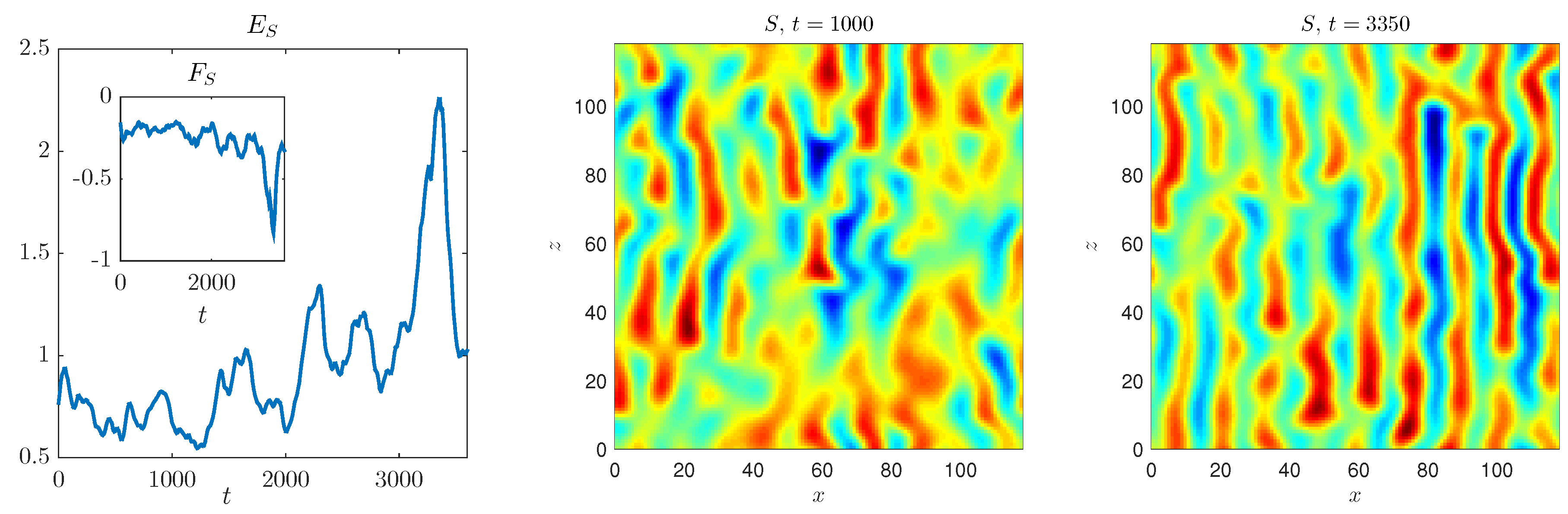
Figure 7 compares the salinity fields in the stationary state for
(
Figure 7a) and
(
Figure 7b). The fingers are clearly visible, as are collisions between descending salt fingers and rising fresh-water fingers. Large-scale patchy structures with fingers of finite length are also observed, indicating the presence of multiscale dynamics that is characteristic of Regime II; cf.
Section 5.1.2.
5.1. Regimes
We consider domains of size where is the optimal wavelength and depends on the value used. In all of the simulations, the initial conditions are taken to be a small amplitude random field, and the model equations are integrated for a sufficiently long time that a statistically stationary state is reached. All averages are calculated after discarding an initial transient.
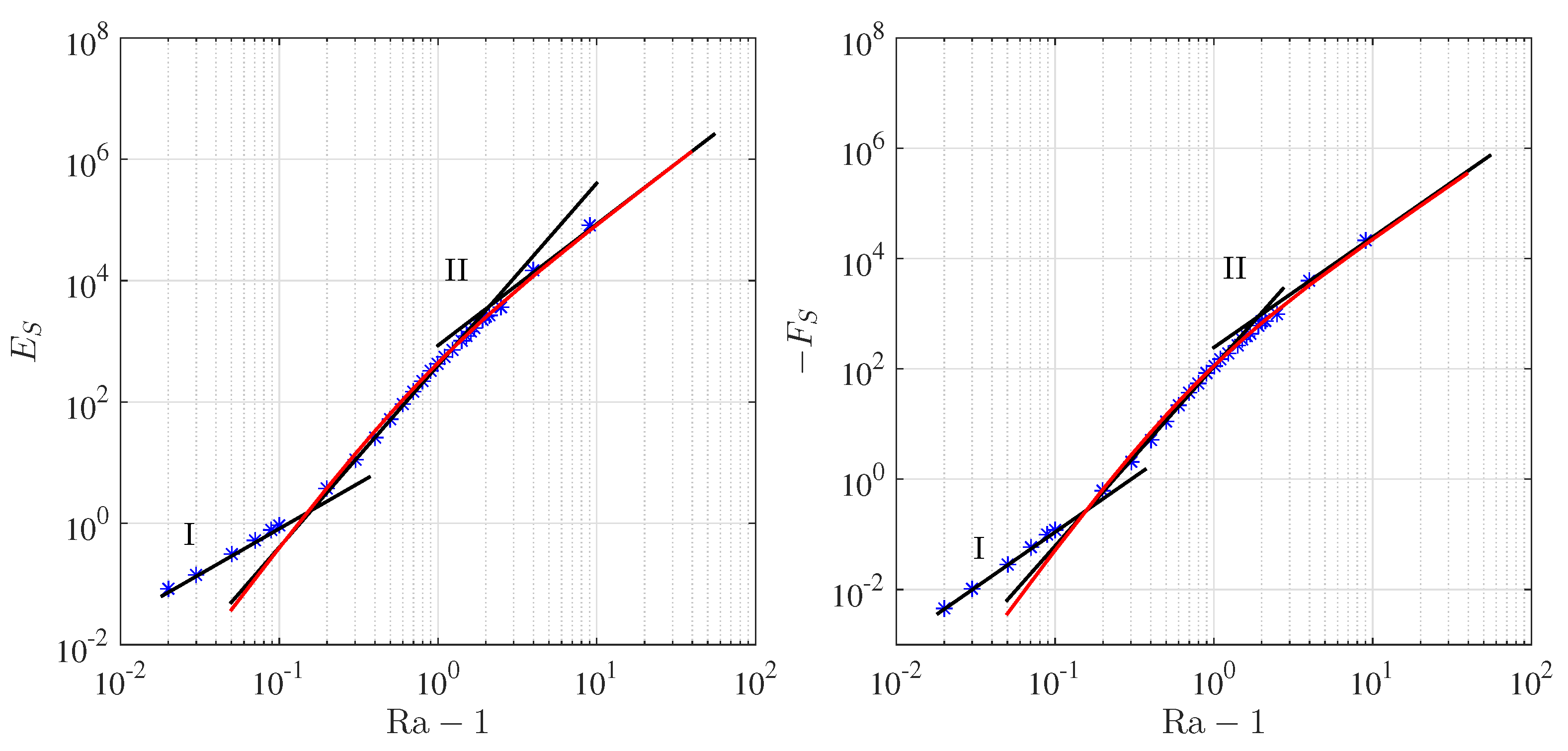
In
Figure 8, we show the dependence of the energy
and the salinity flux
on the parameter
, ranging from
–10. In this figure, three intervals of power-law dependence on the supercriticality
are seen. The first of these corresponds to Regime I, while the latter two correspond to different sub-limits of Regime II.
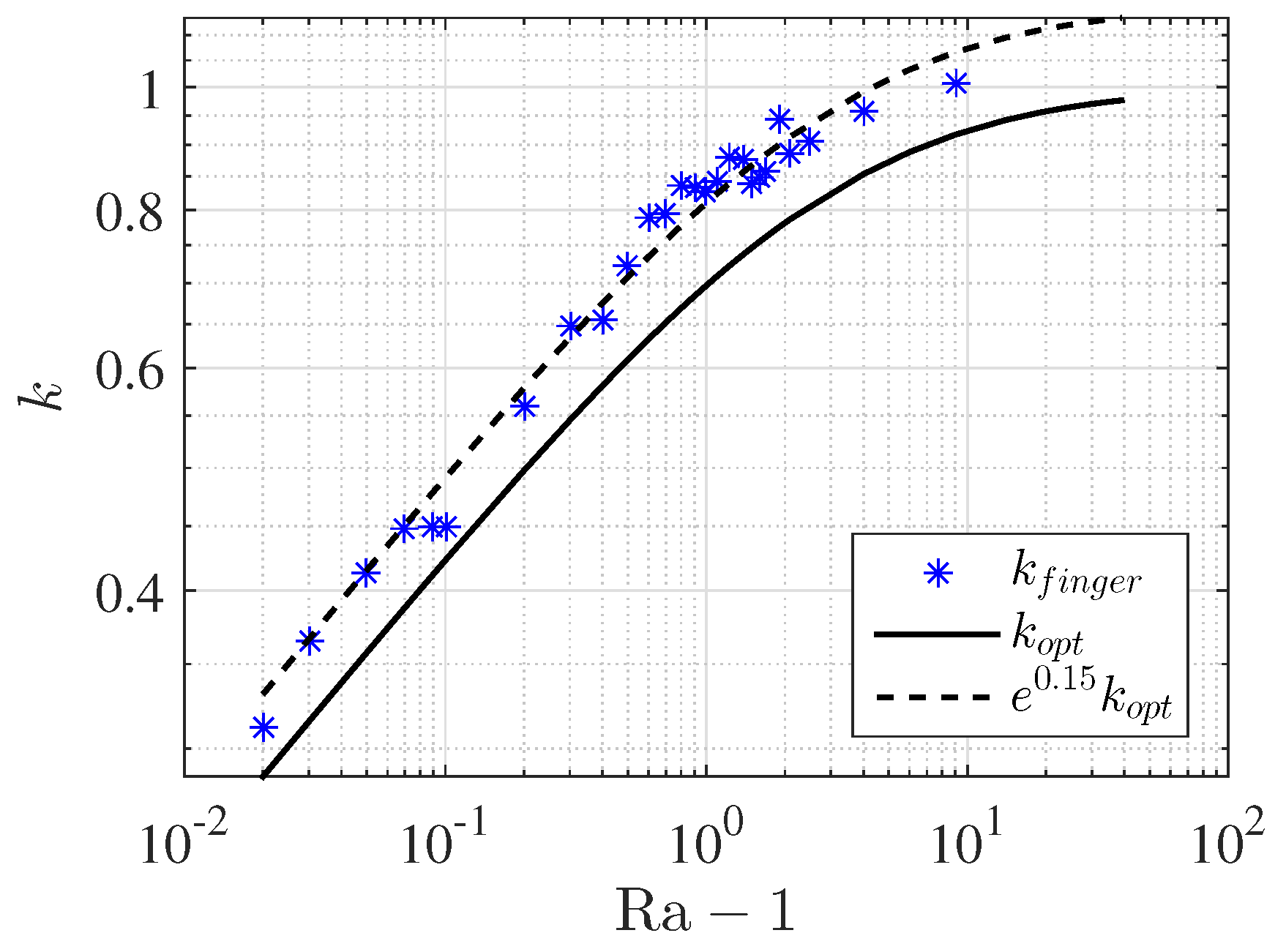
The dynamics of the IFSC model (20) are driven by the linear salt-finger instability, which has the distinctive feature that the optimal (horizontal) wavenumber is finite because of the coexistence of large- and small-scale damping stemming from the stabilizing temperature and viscosity, respectively. In the following, we therefore assume that the characteristic horizontal scale of the system is determined by the optimal wavenumber
and confirm this assumption in
Figure 9, which shows the correspondence between the peak in the energy spectrum obtained from numerical simulations (
Figure 6) and expression (24) for the optimal wavenumber. Here, the constant ratio
between
and
confirms the validity of our assumption.
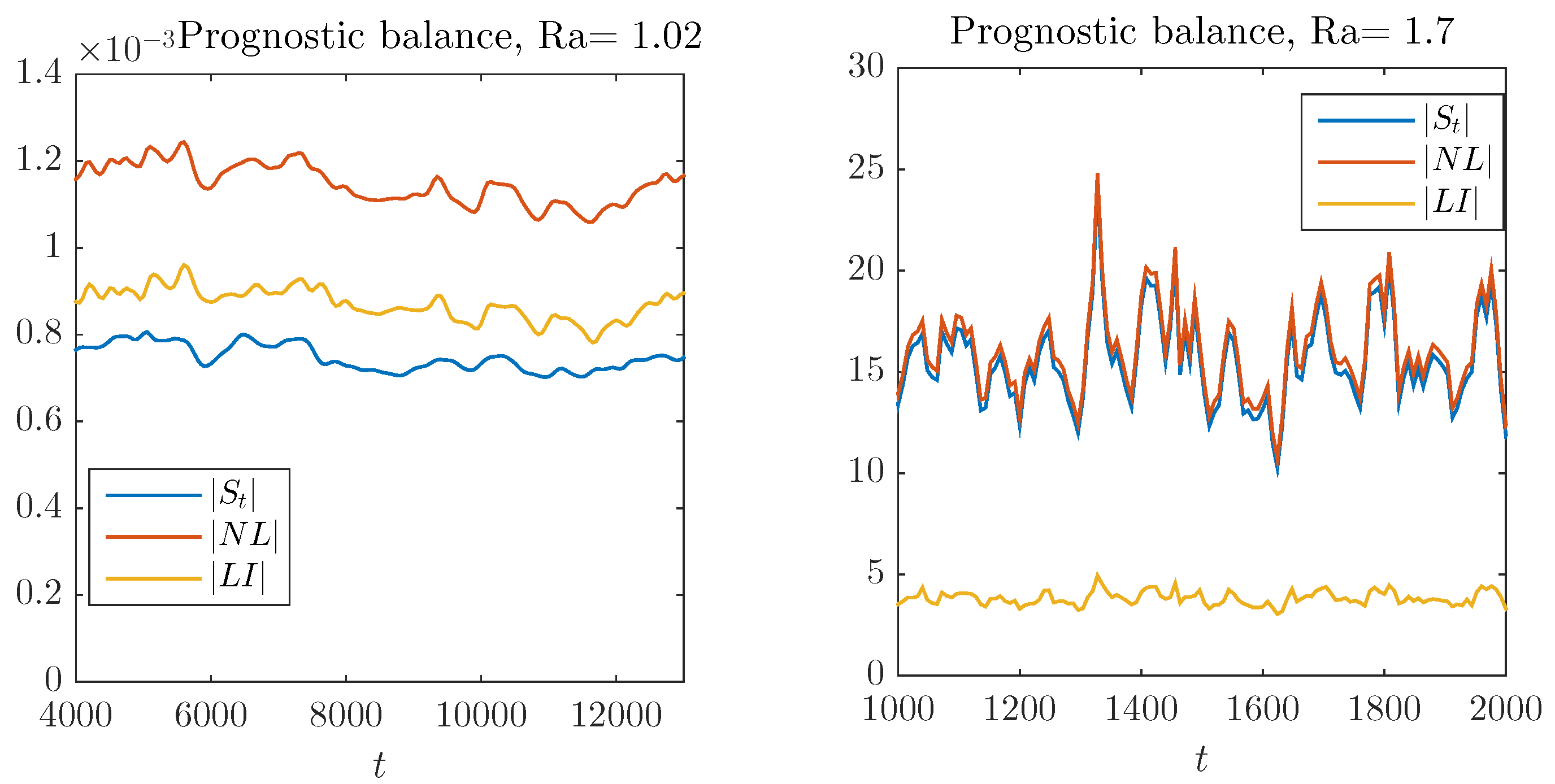
In
Figure 10, we compare the dominant balances in the prognostic equation with
and
. Here,
and
denote nonlinear advection and the linear part of the prognostic equation. In the left panel (Regime I), we find a balance between the time derivative, nonlinear advection and linear instability, while the right panel shows that Regime II is characterized by a balance between the time derivative and nonlinear advection only, with the small difference between these two terms balancing the remaining linear term
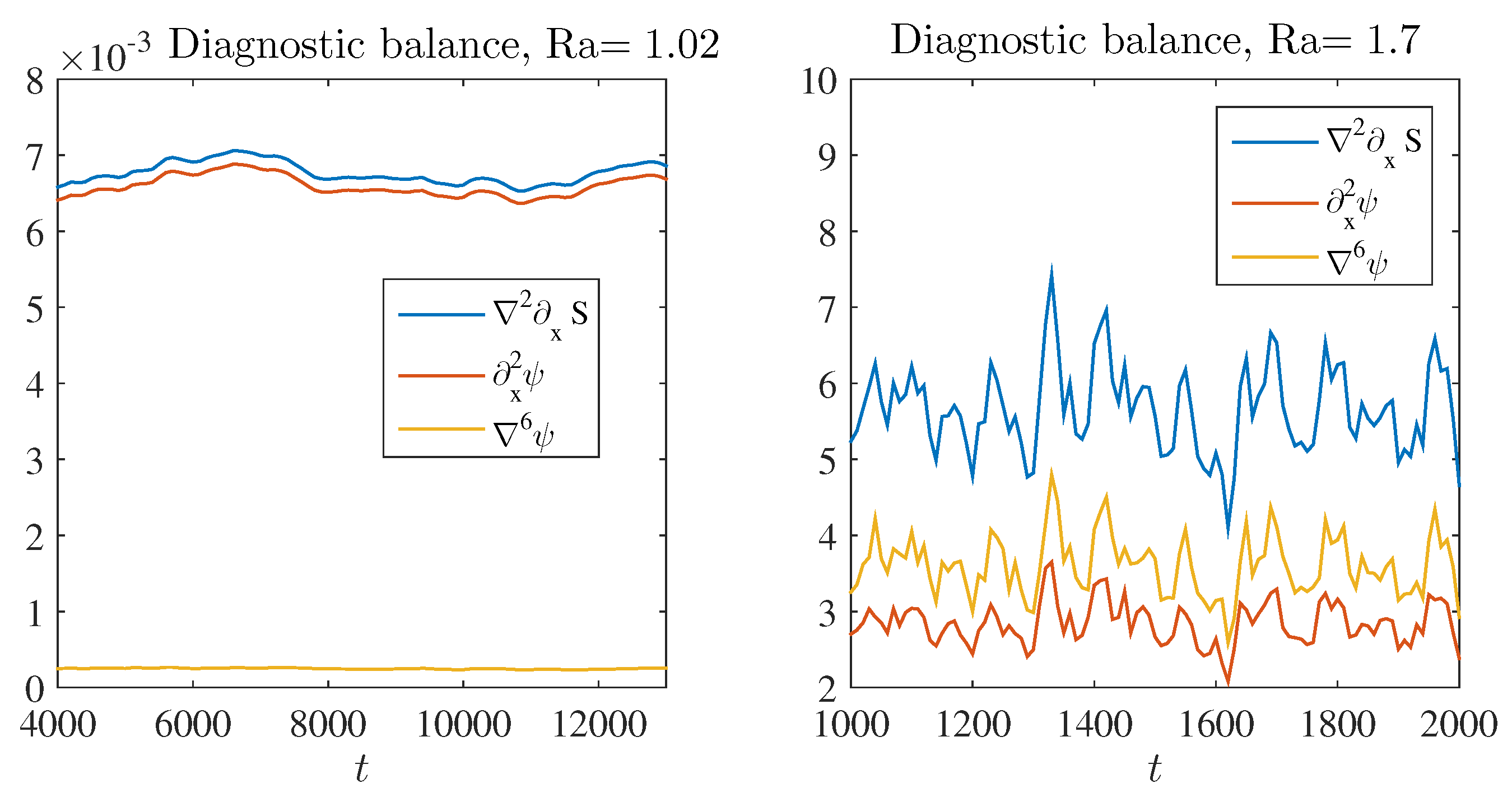
. In
Figure 11, we compare the corresponding dominant balances in the diagnostic relation at the same parameter values,
and
. In the left panel (Regime I), we find a dominant balance between
and
, while in the right panel,
becomes comparable to or larger than
and so participates fully in the dominant balance.
The different dominant balances in the prognostic and diagnostic equations characterizing Regimes I and II indicate that these regimes are fundamentally different. Specifically, consideration of the regime implications on the inertial-free diagnostic balance indicates that Regime I is dominated by a balance between the thermals and salinity buoyancy forces on the characteristic spatial scale of the fingers; recall that in Regime I,
(
Figure 3). In this regime viscous dissipation is only important at scales smaller than the finger scale and takes place primarily at the interface between fingers. Viscous dissipation gains importance in the inertia-free balance in Regime II. This occurs as a direct consequence of: (i) the reduced separation between the fingering scale
∼1 and the viscous dissipation scale; and (ii) the increased collisions between rising and descending fingers. In the following, we include in the term collision any process that leads to a local inversion of the salinity gradient, such as might occur when a descending finger develops an overdense bulbous head.
Based on the expression (
24) for the optimal wavenumber and the dominant balances identified above, we can calculate the parameter dependences in both regimes.
5.1.1. Regime I
Regime I is a small supercriticality regime with
, where the optimal scale is of
(cf. Equation (
26a)) and, hence, large. Here, by large scale we mean that the dominant balance in the diagnostic equation, Equation (
20a), is:
a conclusion confirmed in the left panel of
Figure 11. This statement implies an inviscid inertia-free balance between the thermal and salinity buoyancy forces. In this regime, the appropriate balance in the prognostic equation, Equation (
20b), is between the nonlinear and linear terms (
Figure 10):
where the last relation comes from the linear stability problem. Here,
λ ∼
as obtained from Equation (
26b) and confirmed in
Figure 3a.
We assume power-law dependence on
of the field magnitudes:
With the assumption that the order of magnitude of both the horizontal and vertical derivatives is determined by the optimal wavenumber, i.e.,
(Equation (
26a)) we substitute (
38) into (
36) and (
37) to obtain:
implying that
These exponents are used to generate the Regime I black line in both panels of
Figure 8. We observe a good match between the theoretical and numerical results.
5.1.2. Regime II
In Regime II, the supercriticality
becomes larger than that in Regime I, and therefore, in the diagnostic equation, Equation (
20a), a full balance obtains (cf.
Figure 11):
However, in contrast to Regime I, the leading order prognostic balance now involves the time derivative and the nonlinear terms only, leaving the linear term subdominant. In this regime, we suppose that energy is transferred from the small energy injection scale, which peaks at the optimal wavelength of the fingers, to large scales, a scenario inspired by the observed increase in energy with increasing scale (
Figure 6) and the multiscale operator present in the diagnostic equation. This balance in energy transfer follows the same phenomenology as the energy cascade in isotropic turbulence, where the dissipative effect is also subdominant in the prognostic momentum equation, but determines the energy flux. However, our system differs from isotropic turbulence by the presence of two distinct dominant scales in the energy transfer that participate in the nonlocal interactions in spectral space.
The large-scale field must satisfy the diagnostic relation with negligible small-scale damping:
where the superscript
indicates the large-scale field. As to the prognostic balance, we assume that the large-scale field reaches a distinguished regime, such that the nonlinear and linear terms balance:
Here, the last relation takes advantage of the large scale of the fields and the definition of the supercriticality
.
As in Regime I, we continue to assume that the scales of the fields are controlled by the linear theory optimal mode. However, since
is no longer small, we need to keep the full expression for the optimal wavenumber in Regime II:
Using (
45), we can now calculate the
dependence of the large-scale stream function and salinity from (
43) and (
44):
We express the above-mentioned energy transfer picture in terms of a balance between the advection of potential energy (
) through small- to large-scale interaction and small-scale energy pumping:
where
is the larger of
,
,
and
, and the quantities without the superscript
denote small-scale fields. We need to calculate the four possibilities and check that the computed exponentials ensure the correct small- to large-scale interaction, i.e., that the chosen small- to large-scale advection term used to balance the energy input is the largest of the four. After going through these four cases, we conclude that the right term is
. This choice of interaction term is confirmed in
Figure 6: the salinity spectrum peaks at both large and small scales, while the flux spectrum only peaks at the small scale, implying that advection is dominated by the small-scale velocity.
The resulting balance:
gives us the
dependence of
S:
Substituting (
49) into (
42) now yields:
where the quantity
C measures the degree of isotropy. Empirically, we find that
is a good match, for reasons that remain to be explored. Expressions (
49) and (
50) are used in
Figure 8 to generate the red curves.
Finally, making use of (
49) and (
50), we can obtain the scaling in the two subcases of Regime II: when
is comparable to unity,
and
(cf.
Appendix B), and expressions (
49) and (
50) can be approximated by a power-law dependence on
:
When
is large, Equations (
49) and (
50) become:
We refer to these two regimes as II
and II
, respectively. Expressions (
51) and (
52) are used to generate the four black lines in
Figure 8 when
is not small.
We summarize the scaling results for Regimes I and II in
Table 1.
5.2. Probability Density Functions
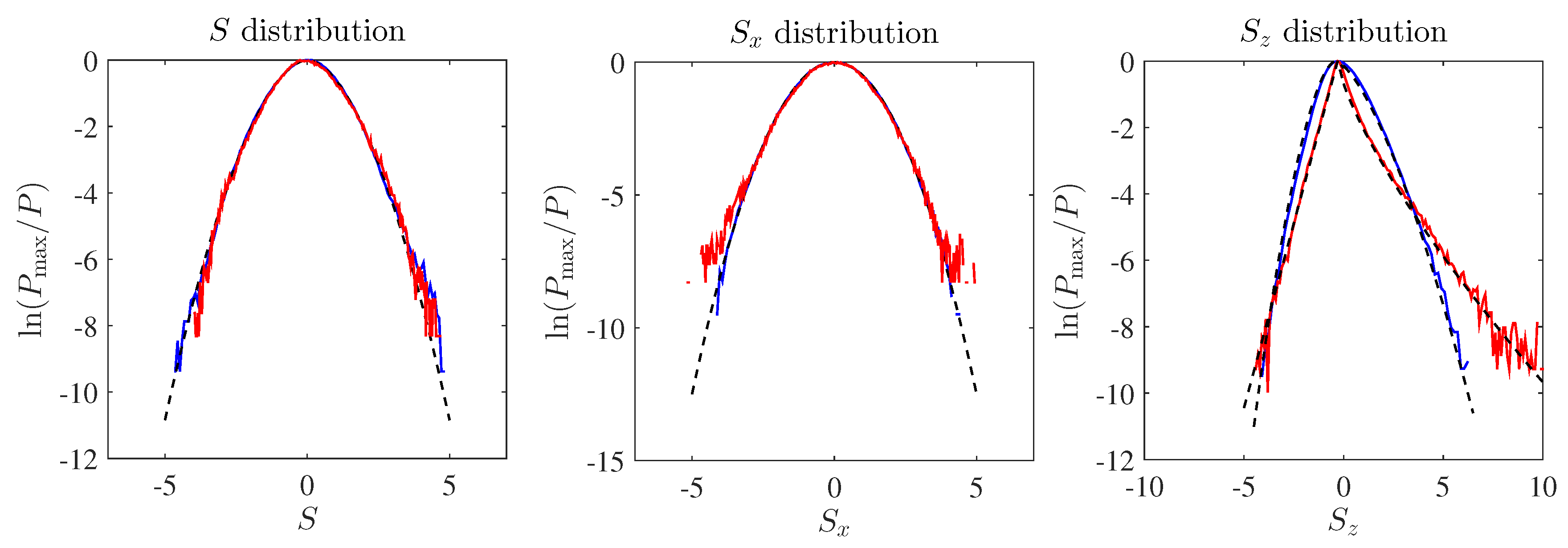
To obtain a detailed understanding of the statistics of the saturated fields, we now turn to the study of the probability density functions (pdfs) of the different fields. In
Figure 12 and
Figure 13, we show the pdfs of the salinity and its derivatives and the pdfs of the stream function and its derivatives in both Regime I (
) and Regime II (
). For
, the pdfs are obtained from data over
(12,000, 13,000) with a step size
, while for
, we show one snapshot at
. All pdfs presented are normalized by their variance.
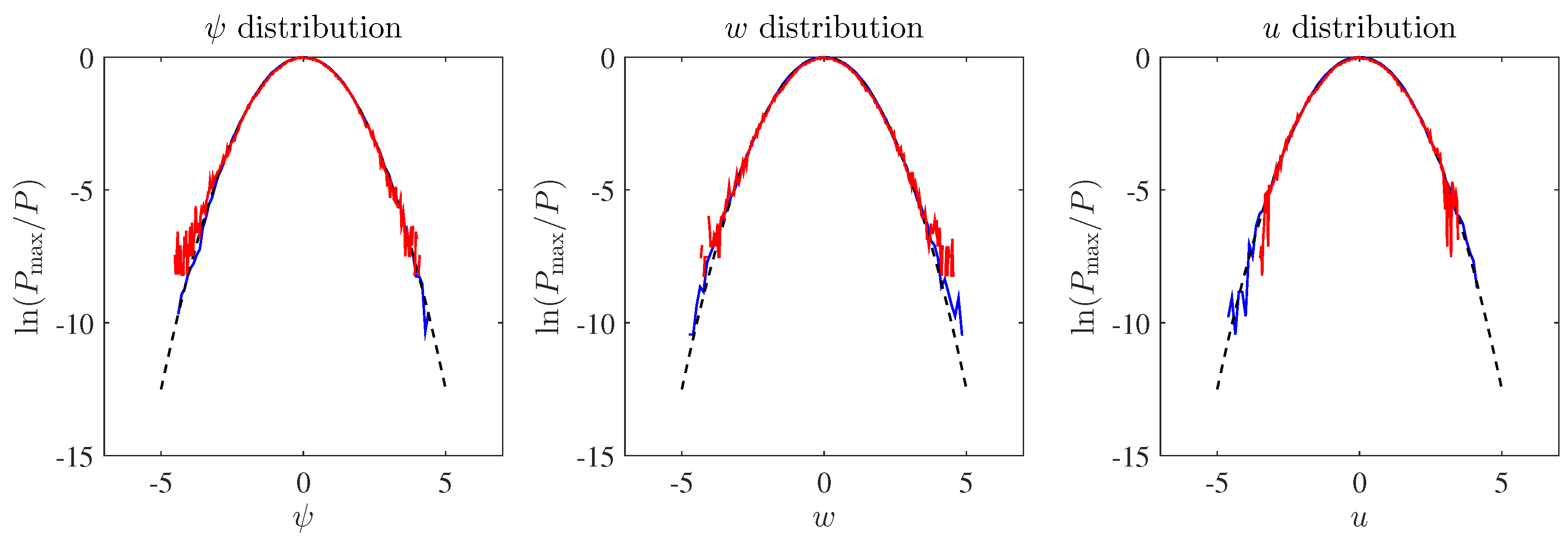
We observe that most fields obey Gaussian or quasi-Gaussian statistics. For more detailed assessment, we fit the pdfs to a general stretched-Gaussian form:
where
α,
β and
are constants and
corresponds to the Gaussian distribution. The parameter
β is adjusted to obtain a probability density function with variance of one, and
normalizes the distribution:
where Γ is the gamma function. From the second relation above, we calculate
β in
Table 2 for the pdfs of
S,
,
ψ,
w and
u. This form has been utilized in the context of Rayleigh–Bénard convection in [
39].
In addition to the above general form, there are several other interesting features that can be learned from these figures. In the right panel of
Figure 12, the pdfs of
are not symmetric with respect to their peaks, indicating obvious skewness. This asymmetry originates from the collisions between positive (rising) and negative (descending) fingers: collisions occur where
is positive and tend to increase the salinity gradient. Nontrivial skewness is a common feature of convection where coherent structures, such as fingers or plumes, exist and has been studied in Rayleigh–Bénard convection to identify plume generation [
40]. In the same way, enhanced positive tails in the pdfs of
for larger
indicate the increasing importance of finger collision.
However, there is no such asymmetry in
ψ because
is the horizontal velocity, which preserves on average the reflection symmetry
of the system. The pdfs of
,
ψ,
w and
u are all Gaussian (cf.
Figure 12 and
Figure 13), which is very useful for parameterization. Since
Section 5.1 develops a theory for the dependence of the variance of the different fields on the parameter
(equivalently
), the statistics of the quantities with Gaussian distribution are fully understood, and these can be used to parameterize the diffusivity induced by salt-fingering convection as
varies.
6. Discussion and Conclusions
In this paper, we systematically derived two reduced models for salt-fingering convection in the limit of small diffusivity and large density ratios,
and
. In the modified RBC model (18), the stabilizing temperature plays the role of large-scale damping, which when combined with the small-scale viscosity leads to a finite optimal wavenumber corresponding to the fastest linear growth rate. This model may find application in the astrophysical context where
. In the parameter regime corresponding to the oceans where
is large, we obtained a simpler model, the inertia-free salt convection model (20), which has a prognostic-diagnostic form, and we studied this model in detail. In large domains, corresponding to large thermal and solutal Rayleigh numbers, we checked that this model preserves the linear and secondary instabilities present in the primitive equations and that it captures the three stages—finger dominance, finger disruption and saturation—that have been observed to lead to a statistically steady saturated state. Both secondary instability and finger collision were found to be responsible for the presence of this state, thereby extending the conclusion reached by Shen [
6] that finger collisions are important at
density ratios to the limit of large density ratios.
The properties of the saturated state depend on the Rayleigh ratio
. We identified two parameter regimes characterized by different balances in both the diagnostic and prognostic equations, corresponding to weak and strong supercriticalities, leading to distinct saturated states. In Regime I, where the width of the salt fingers scales as
∼
, the temperature and salinity buoyancy effects dominate the diagnostic equation, and viscous dissipation is negligible. In the prognostic equation, a balance between linear instability and nonlinear advection indicates that the growth rates of primary and secondary instabilities are of the same order (cf. [
10,
38]). In this regime, we find power-law dependences on the supercriticality of the saturated state. Regime II occurs at larger supercriticality. Even though this indicates stronger driving forces, viscous dissipation enters the diagnostic balance. This counterintuitive fact results from the smaller salt-finger scale at larger supercriticalities. In addition to the small salt-finger scale, a large scale is also present. This scale is fed by an energy transfer from the small finger scale at which energy is injected into the system, and it is this energy transfer that characterizes Regime II. The result relies on the dependence of the energy injection scale on the Rayleigh ratio, leading to two sub-limits with distinct power-law dependence.
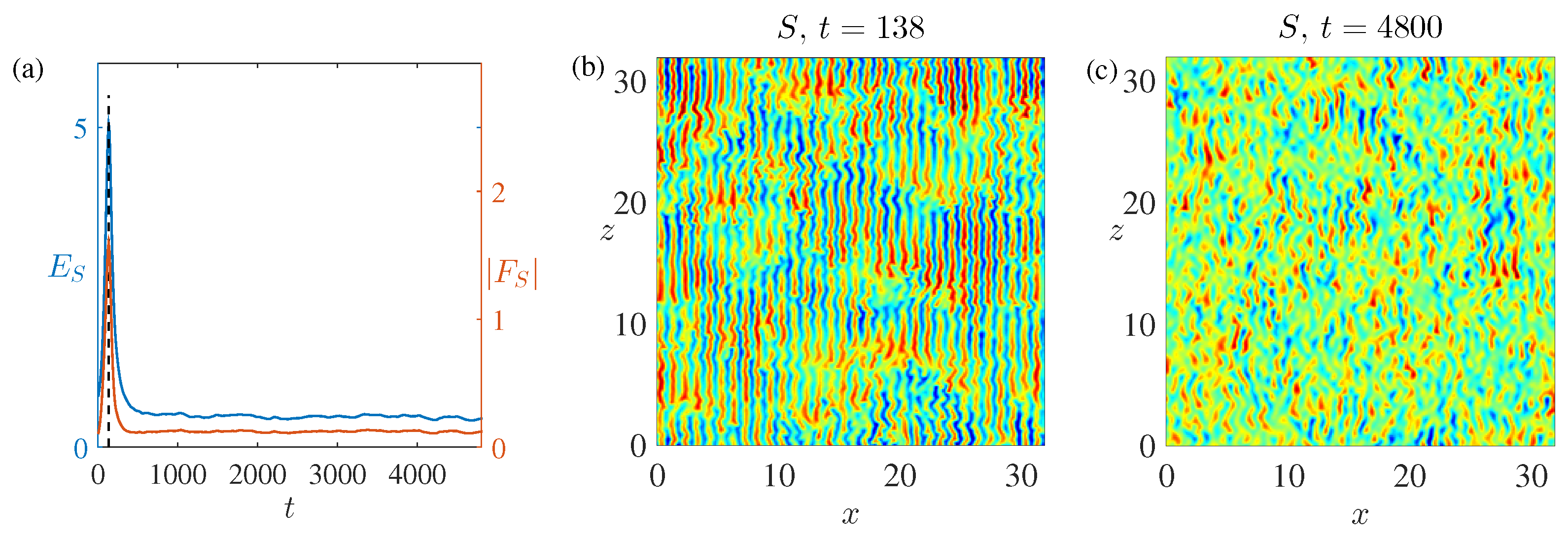
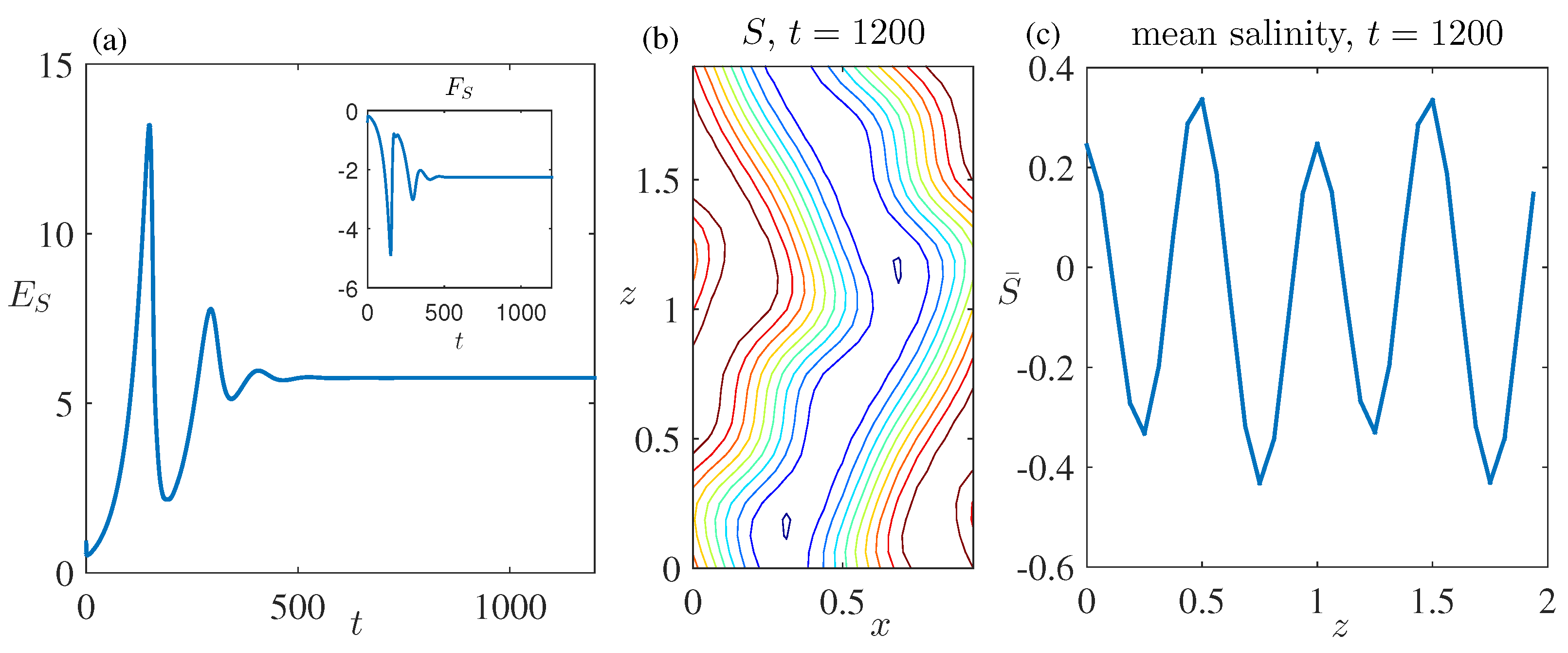
The presence of a saturated state even in the presence of exact elevator mode solutions that grow exponentially forever requires that our simulations are initialized with broad-band initial conditions, cf. [
41,
42]. In this case, the system is unable to ‘find’ the growing elevator mode state, resulting in a saturated state exhibiting a broad range of spatial scales.
Figure 5a shows an example of the transient generation of elevator modes followed by their disruption via secondary instability. The resulting statistically steady state is characterized by pdfs that have in general a stretched Gaussian form. In particular, the horizontal and vertical velocities have Gaussian distributions and can therefore be used to calculate the diffusivity of turbulent salt-finger convection, which can be further developed into a parameterization of transport processes. In this connection, we mention that in two-dimensional Rayleigh–Bénard convection, such Gaussian pdfs are universal [
43]. Moreover, passive tracers in such a system have identical statistics [
43]. In salt-finger convection, it is the salinity field that drives convection, but a tracer like the temperature is not passive since it contributes to buoyancy. As a result, one might expect departures from Gaussian pdfs, and indeed, such departures have been detected [
44]. However, in both of our reduced models, the temperature field is slaved to the stream function, and the resulting models resemble the equations governing two-dimensional Rayleigh–Bénard convection. We conjecture that this is the reason why we find Gaussian velocity pdfs in our computations.
Our IFSC model (20) is linked to the weakly nonlinear model derived by Radko [
7] (see Equations (
8) and (
11) of [
7]). Even though different parameter regimes are considered in the two models—our reduced model for
captures a fully-nonlinear regime where dynamics are not confined to the onset of instability (
ranges from 1–
∞), while Radko’s [
7] model relaxes the small
τ assumption, but is restricted to dynamics near the onset: the two models match in the overlapping regime
and
with
and
. In this regime, the optimal scale from Equation (
24) is of
, suggesting the rescaling:
With this rescaling, the leading order contribution to (20) reads:
which is identical to the model derived by Radko [
7] in the limit of small
τ.
In our simulations, we found that the characteristic length of the fingers increases as
increases (cf.
Figure 5 and
Figure 7), in contrast to a result of Merryfield and Grinder (cf. Figure 8 in [
45]). Evidently, salt-finger convection exhibits different limiting parameter regimes: in our model,
τ and
are constrained to be of the same order and to be small, while in the simulations of Merryfield and Grinder, the value of
τ is fixed.
We may define a salinity Nusselt number by:
and use the Regime II scalings to obtain
in the limit of large
. This result is to be compared with the asymptotic result
obtained by Yang et al. [
23] for a vertically-bounded domain. Evidently, the presence of elevator modes permitted in the doubly-periodic domain leads to a very substantial enhancement of the salinity flux. In view of (
10), our thermal Rayleigh number
is of order
, while the salinity Rayleigh number
is of order
(see Equation (
15)). These values are comparable to those used in [
23], although our density ratio is much larger than that in [
23].
Salt-finger convection often results in the formation of salinity staircases [
11,
38,
46,
47], and these have been extensively studied in oceanographic measurements, numerical simulations and theories. In our IFSC model, we have not observed the formation of staircases. This may be because our model filters out gravity waves, which are believed to be important for staircase formation through collective instability [
5,
9]. The
γ-instability mechanism proposed by Radko [
38] provides an alternative explanation, but requires a nonmonotonic dependence of the flux ratio on the mean density gradient. In our reduced model, the background temperature gradient remains at leading order constant. Consequently, within the model, this condition can be interpreted as requiring a nonmonotonic dependence of the salt flux on the mean salinity gradient, a situation that never arises. Thus, neither mechanism for staircase formation is present. Having said this, Brown et al. [
10] and Garaud et al. [
48] recently discovered that staircases can form in three dimensions even when the flux increases monotonically with the density gradient, although their mechanism also relies on gravity wave generation. In summary, the possibility that the model (in two or three dimensions) captures staircase formation must be kept open, particularly at large
, since oceanic staircases are observed in regions with density ratios that are in fact quite small.
In a future publication, we plan to study the large regime of the model and to discuss the extent to which the conclusions of this paper carry over to three dimensions.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}