Closure Learning for Nonlinear Model Reduction Using Deep Residual Neural Network


Abstract
:1. Introduction
- A novel ROM closure learning framework centered around deep neural networks.
- A hybrid framework that synthesizes the strengths of physical modeling and data-driven modeling.
- Very good performance in numerical tests, in both the reconstructive and the predictive regime.
- Significant improvement in numerical accuracy compared with state of the art ROM closure models.
2. Reduced Order Model
3. Closure Learning
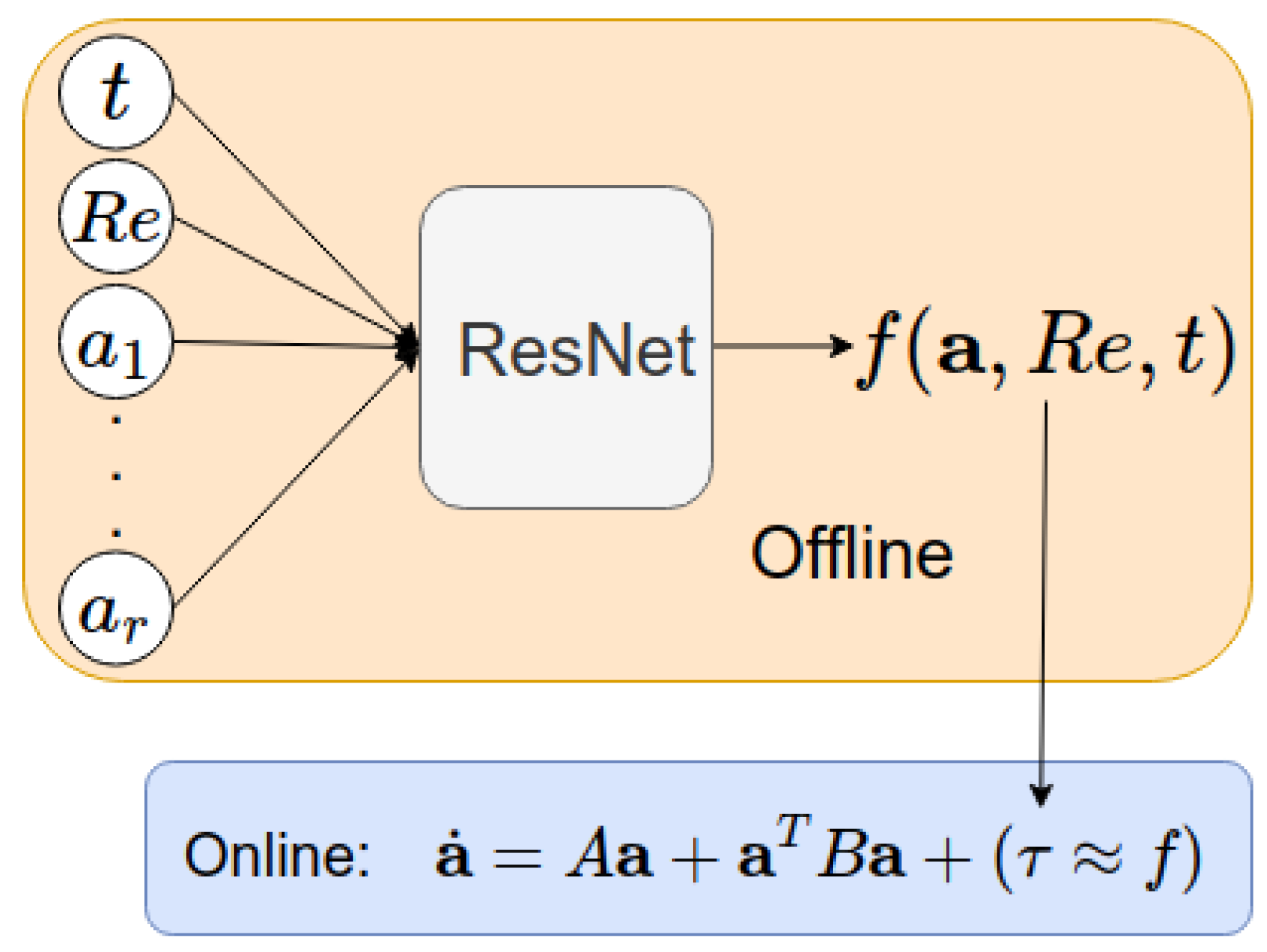
3.1. Residual Neural Network (ResNet)
3.2. ROM Closure Modeling
3.3. ROM Closure Learning
| Algorithm 1 ResNet-ROM |
|
4. Numerical Experiments
4.1. Implementation
4.2. Reconstruction
4.3. Prediction
4.4. Comparison
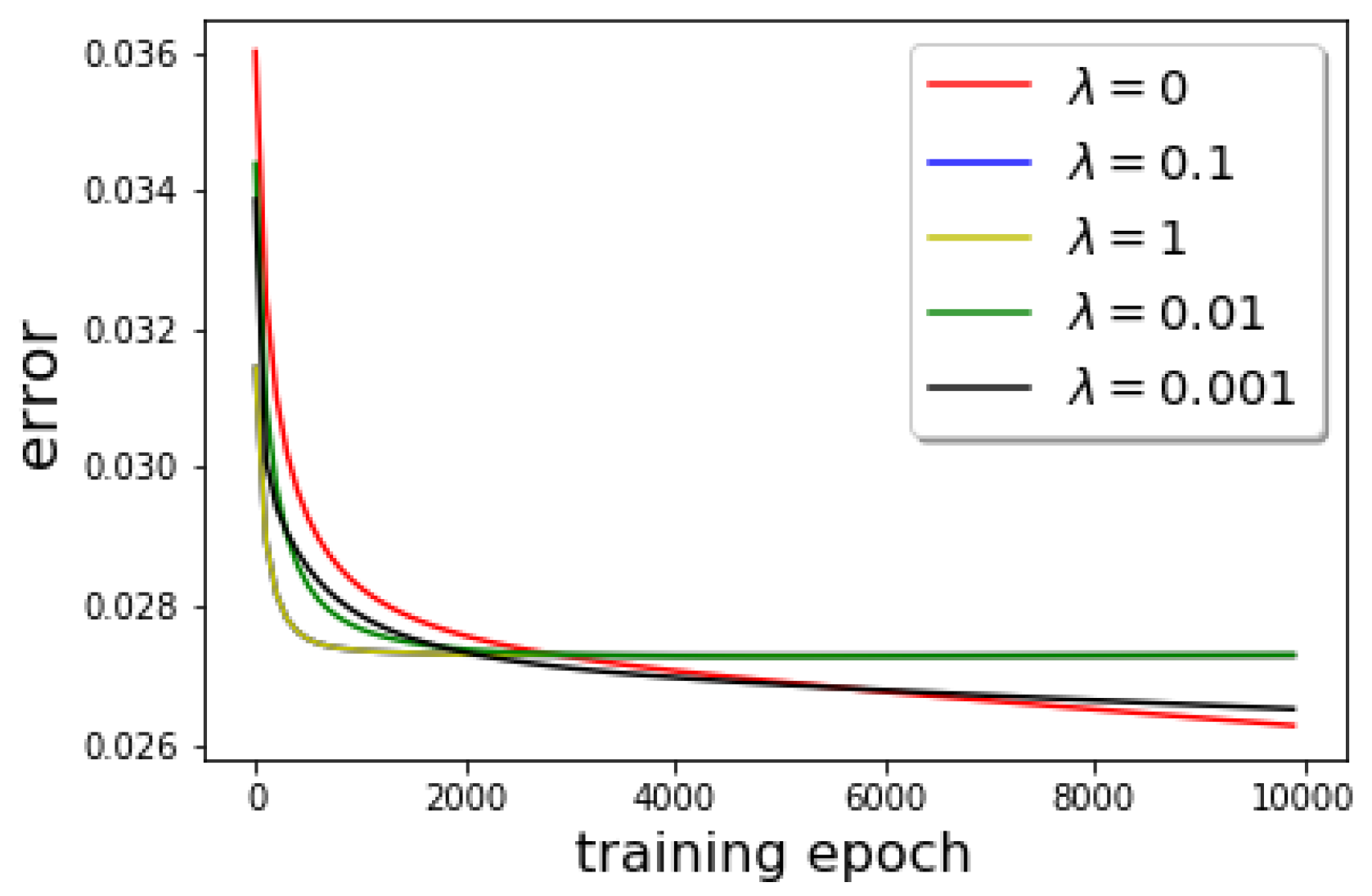
4.5. Sensitivity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ResNet | Residual Neural Network |
| ROM | Reduced Order Modeling |
| GP-ROM | Galerkin Projection Reduced Order Model |
| POD | Proper Orthogonal Decomposition |
| FOM | Full Order Model |
| LES | Large Eddy Simulation |
| VMS | Variational Multiscale |
| NSE | Navier-Stokes Equations |
References
- Holmes, P.; Lumley, J.L.; Berkooz, G. Turbulence, Coherent Structures, Dynamical Systems and Symmetry; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Noack, B.R.; Morzynski, M.; Tadmor, G. Reduced-Order Modelling for Flow Control; Springer: Berlin/Heidelberg, Germany, 2011; Volume 528. [Google Scholar]
- Hesthaven, J.S.; Rozza, G.; Stamm, B. Certified Reduced Basis Methods for Parametrized Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations: An Introduction; Springer: Berlin/Heidelberg, Germany, 2015; Volume 92. [Google Scholar]
- Mohebujjaman, M.; Rebholz, L.G.; Xie, X.; Iliescu, T. Energy balance and mass conservation in reduced order models of fluid flows. J. Comput. Phys. 2017, 346, 262–277. [Google Scholar] [CrossRef]
- Akkari, N.; Casenave, F.; Moureau, V. Time stable reduced order modeling by an enhanced reduced order basis of the turbulent and incompressible 3D Navier–Stokes equations. Math. Comput. Appl. 2019, 24, 45. [Google Scholar] [CrossRef] [Green Version]
- Cagniart, N.; Maday, Y.; Stamm, B. Model order reduction for problems with large convection effects. In Contributions to Partial Differential Equations and Applications; Springer: Berlin, Germany, 2019; pp. 131–150. [Google Scholar]
- Iollo, A.; Lanteri, S.; Désidéri, J.A. Stability properties of POD–Galerkin approximations for the compressible Navier–Stokes equations. Theoret. Comput. Fluid Dyn. 2000, 13, 377–396. [Google Scholar] [CrossRef] [Green Version]
- Stabile, G.; Hijazi, S.; Mola, A.; Lorenzi, S.; Rozza, G. POD-Galerkin reduced order methods for CFD using finite volume discretisation: Vortex shedding around a circular cylinder. Commun. Appl. Ind. Math. 2017, 8, 210–236. [Google Scholar] [CrossRef] [Green Version]
- Loiseau, J.C.; Brunton, S.L. Constrained sparse Galerkin regression. J. Fluid Mech. 2018, 838, 42–67. [Google Scholar] [CrossRef] [Green Version]
- Noack, B.R.; Stankiewicz, W.; Morzyński, M.; Schmid, P.J. Recursive dynamic mode decomposition of transient and post-transient wake flows. J. Fluid Mech. 2016, 809, 843–872. [Google Scholar] [CrossRef] [Green Version]
- Amsallem, D.; Farhat, C. Stabilization of projection-based reduced-order models. Int. J. Num. Meth. Eng. 2012, 91, 358–377. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef] [Green Version]
- Baiges, J.; Codina, R.; Idelsohn, S. Reduced-order subscales for POD models. Comput. Methods Appl. Mech. Eng. 2015, 291, 173–196. [Google Scholar] [CrossRef] [Green Version]
- Feppon, F.; Lermusiaux, P.F.J. Dynamically orthogonal numerical schemes for efficient stochastic advection and Lagrangian transport. SIAM Rev. 2018, 60, 595–625. [Google Scholar] [CrossRef]
- Fick, L.; Maday, Y.; Patera, A.T.; Taddei, T. A stabilized POD model for turbulent flows over a range of Reynolds numbers: Optimal parameter sampling and constrained projection. J. Comput. Phys. 2018, 371, 214–243. [Google Scholar] [CrossRef]
- Hijazi, S.; Stabile, G.; Mola, A.; Rozza, G. Data-driven POD-Galerkin reduced order model for turbulent flows. arXiv 2019, arXiv:1907.09909. [Google Scholar]
- Lu, F.; Lin, K.K.; Chorin, A.J. Data-based stochastic model reduction for the Kuramoto–Sivashinsky equation. Phys. D 2017, 340, 46–57. [Google Scholar] [CrossRef] [Green Version]
- Majda, A.J.; Harlim, J. Physics constrained nonlinear regression models for time series. Nonlinearity 2012, 26, 201. [Google Scholar] [CrossRef]
- Rebollo, T.C.; Ávila, E.D.; Mármol, M.G.; Ballarin, F.; Rozza, G. On a certified Smagorinsky reduced basis turbulence model. SIAM J. Numer. Anal. 2017, 55, 3047–3067. [Google Scholar] [CrossRef] [Green Version]
- San, O.; Iliescu, T. A stabilized proper orthogonal decomposition reduced-order model for large scale quasigeostrophic ocean circulation. Adv. Comput. Math. 2015, 41, 1289–1319. [Google Scholar] [CrossRef] [Green Version]
- San, O.; Maulik, R. Neural network closures for nonlinear model order reduction. Adv. Comput. Math. 2018, 44, 1–34. [Google Scholar] [CrossRef] [Green Version]
- Stabile, G.; Ballarin, F.; Zuccarino, G.; Rozza, G. A reduced order variational multiscale approach for turbulent flows. Adv. Comput. Math. 2019, 45, 2349–2368. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Akhtar, I.; Borggaard, J.; Iliescu, T. Proper orthogonal decomposition closure models for turbulent flows: A numerical comparison. Comput. Methods Appl. Mech. Eng. 2012, 237–240, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Bergmann, M.; Bruneau, C.H.; Iollo, A. Enablers for robust POD models. J. Comput. Phys. 2009, 228, 516–538. [Google Scholar] [CrossRef] [Green Version]
- Carlberg, K.; Bou-Mosleh, C.; Farhat, C. Efficient non-linear model reduction via a least-squares Petrov–Galerkin projection and compressive tensor approximations. Int. J. Num. Meth. Eng. 2011, 86, 155–181. [Google Scholar] [CrossRef]
- Parish, E.J.; Wentland, C.; Duraisamy, K. The adjoint Petrov-Galerkin method for non-linear model reduction. arXiv 2018, arXiv:1810.03455. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Wells, D.; Wang, Z.; Iliescu, T. Approximate deconvolution reduced order modeling. Comput. Methods Appl. Mech. Eng. 2017, 313, 512–534. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Mohebujjaman, M.; Rebholz, L.; Iliescu, T. Data-driven filtered reduced order modeling of fluid flows. SIAM J. Sci. Comput. 2018, 40, B834–B857. [Google Scholar] [CrossRef] [Green Version]
- Pope, S. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Sagaut, P. Large Eddy Simulation for Incompressible Flows, 3rd ed.; Scientific Computation; Springer: Berlin, Germany, 2006. [Google Scholar]
- Couplet, M.; Sagaut, P.; Basdevant, C. Intermodal energy transfers in a proper orthogonal decomposition—Galerkin representation of a turbulent separated flow. J. Fluid Mech. 2003, 491, 275–284. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27 June 2016; pp. 770–778. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Lu, Y.; Zhong, A.; Li, Q.; Dong, B. Beyond finite layer neural networks: Bridging deep architectures and numerical differential equations. arXiv 2017, arXiv:1710.10121. [Google Scholar]
- Chang, B.; Meng, L.; Haber, E.; Tung, F.; Begert, D. Multi-level residual networks from dynamical systems view. arXiv 2017, arXiv:1710.10348. [Google Scholar]
- Chang, B.; Meng, L.; Haber, E.; Ruthotto, L.; Begert, D.; Holtham, E. Reversible architectures for arbitrarily deep residual neural networks. In Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, LO, USA, 2 February 2018. [Google Scholar]
- Maulik, R.; Mohan, A.; Lusch, B.; Madireddy, S.; Balaprakash, P. Time-series learning of latent-space dynamics for reduced-order model closure. arXiv 2019, arXiv:1906.07815. [Google Scholar] [CrossRef] [Green Version]
- Rahman, S.M.; Pawar, S.; San, O.; Rasheed, A.; Iliescu, T. A non-intrusive reduced order modeling framework for quasi-geostrophic turbulence. arXiv 2019, arXiv:11906.11617. [Google Scholar]
- Ahmed, S.E.; San, O.; Rasheed, A.; Iliescu, T. A long short-term memory embedding for hybrid uplifted reduced order models. arXiv 2019, arXiv:1912.06756. [Google Scholar]
- Maulik, R.; Lusch, B.; Balaprakash, P. Reduced-order modeling of advection-dominated systems with recurrent neural networks and convolutional autoencoders. arXiv 2020, arXiv:2002.00470. [Google Scholar]
- San, O.; Maulik, R. Machine learning closures for model order reduction of thermal fluids. Appl. Math. Model. 2018, 60, 681–710. [Google Scholar] [CrossRef]
- Koc, B.; Mohebujjaman, M.; Mou, C.; Iliescu, T. Commutation error in reduced order modeling of fluid flows. Adv. Comput. Math. 2019, 45, 2587–2621. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.Q.; Rubanova, Y.; Bettencourt, J.; Duvenaud, D. Neural ordinary differential equations. arXiv 2018, arXiv:1806.07366. [Google Scholar]
- Baiges, J.; Codina, R.; Castanar, I.; Castillo, E. A finite element reduced order model based on adaptive mesh refinement and artificial neural networks. Int. J. Numer. Methods Eng. 2019, 121, 588–601. [Google Scholar] [CrossRef]
- Chekroun, M.D.; Liu, H.; McWilliams, J.C. Variational approach to closure of nonlinear dynamical systems: Autonomous case. J. Stat. Phys. 2019, 1–88. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.K.; Lu, F. Data-driven model reduction, Wiener projections, and the Mori-Zwanzig formalism. arXiv 2019, arXiv:1908.07725. [Google Scholar]
- Mohebujjaman, M.; Rebholz, L.G.; Iliescu, T. Physically-constrained data-driven correction for reduced order modeling of fluid flows. Int. J. Num. Methods Fluids 2019, 89, 103–122. [Google Scholar] [CrossRef] [Green Version]
- John, V. Finite Element Methods for Incompressible Flow Problems; Springer: Berlin, Germany, 2016. [Google Scholar]
- Mou, C.; Koc, B.; San, O.; Iliescu, T. Data-driven variational multiscale reduced order models. arXiv 2020, arXiv:2002.06457. [Google Scholar]
- Borggaard, J.; Iliescu, T.; Wang, Z. Artificial viscosity proper orthogonal decomposition. Math. Comput. Model. 2011, 53, 269–279. [Google Scholar] [CrossRef]
- Kunisch, K.; Volkwein, S. Galerkin proper orthogonal decomposition methods for parabolic problems. Numer. Math. 2001, 90, 117–148. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Akhtar, I.; Wang, Z.; Borggaard, J.; Iliescu, T. A new closure strategy for proper orthogonal decomposition reduced-order models. J. Comput. Nonlinear Dyn. 2012, 7, 39–54. [Google Scholar] [CrossRef]
- Wells, D.; Wang, Z.; Xie, X.; Iliescu, T. An evolve-then-filter regularized reduced order model for convection-dominated flows. Int. J. Num. Methods Fluids 2017, 84, 598–615. [Google Scholar] [CrossRef]
- Caiazzo, A.; Iliescu, T.; John, V.; Schyschlowa, S. A numerical investigation of velocity-pressure reduced order models for incompressible flows. J. Comput. Phys. 2014, 259, 598–616. [Google Scholar] [CrossRef]
- Giere, S.; Iliescu, T.; John, V.; Wells, D. SUPG reduced order models for convection-dominated convection-diffusion-reaction equations. Comput. Methods Appl. Mech. Eng. 2015, 289, 454–474. [Google Scholar] [CrossRef]
- Wang, Z. Reduced-Order Modeling of Complex Engineering and Geophysical Flows: Analysis and Computations. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2012. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Webster, C.; Iliescu, T. Closure Learning for Nonlinear Model Reduction Using Deep Residual Neural Network. Fluids 2020, 5, 39. https://doi.org/10.3390/fluids5010039
Xie X, Webster C, Iliescu T. Closure Learning for Nonlinear Model Reduction Using Deep Residual Neural Network. Fluids. 2020; 5(1):39. https://doi.org/10.3390/fluids5010039
Chicago/Turabian StyleXie, Xuping, Clayton Webster, and Traian Iliescu. 2020. "Closure Learning for Nonlinear Model Reduction Using Deep Residual Neural Network" Fluids 5, no. 1: 39. https://doi.org/10.3390/fluids5010039
APA StyleXie, X., Webster, C., & Iliescu, T. (2020). Closure Learning for Nonlinear Model Reduction Using Deep Residual Neural Network. Fluids, 5(1), 39. https://doi.org/10.3390/fluids5010039