Control and Optimization of Interfacial Flows Using Adjoint-Based Techniques

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
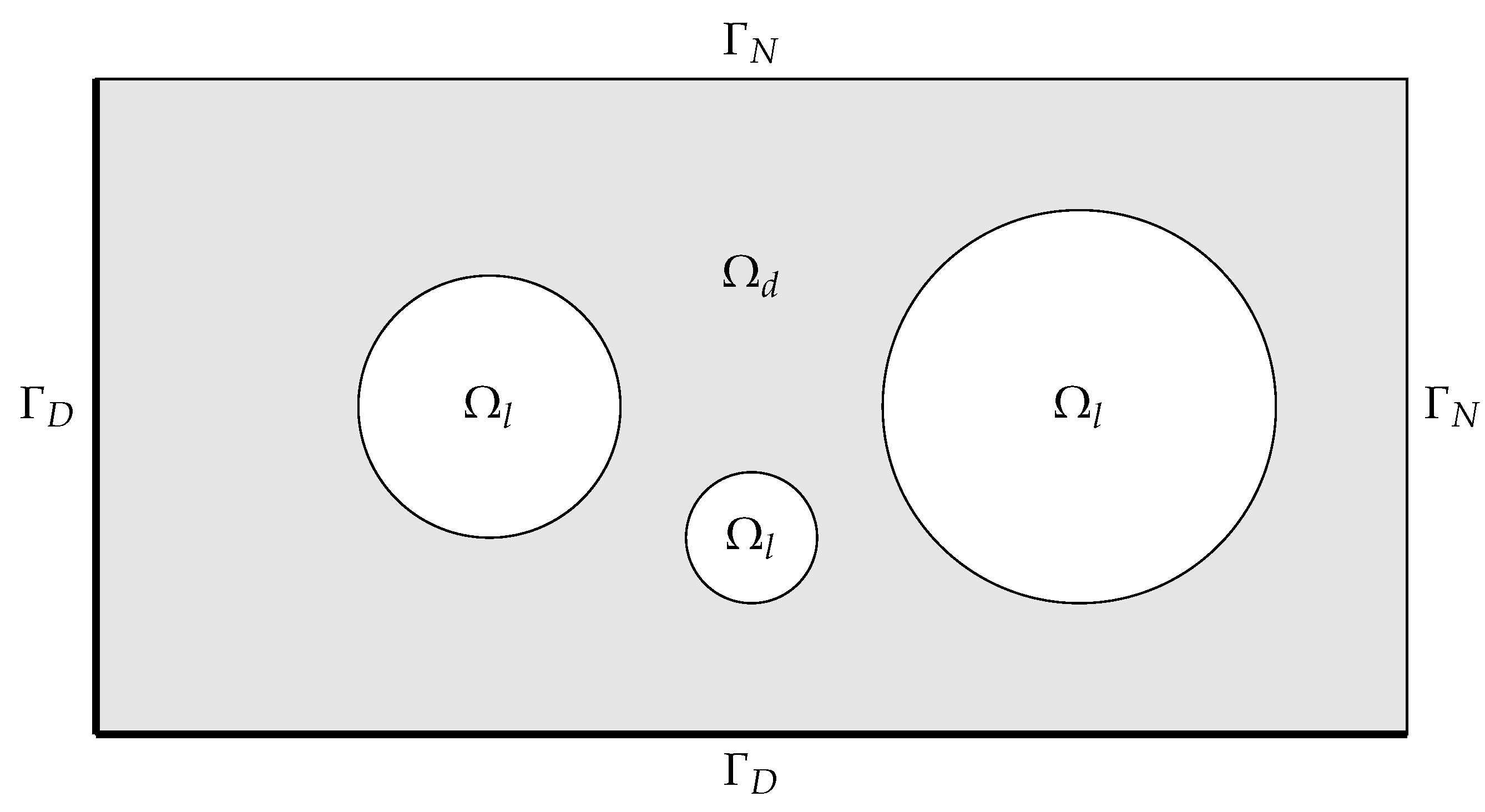
2. Continuous Governing Equations
2.1. Objective Functional
2.2. Primal (Forward) Problem
2.3. Dual (Adjoint) Problem
3. Discrete Governing Equations
3.1. Objective Functional
3.2. The Thinc Scheme
- is the non-dimensional slope steepness, defining the sharpness of the interface. Larger values imply sharper interfaces. Note that is often expressed in terms of two other parameters as followswhere represents the number of cells for the hyperbolic tangent to transition from to ,
- is the interface directionwhere sgn denotes the signum function,
- is the non-dimensional intercept or jump location, which defines the level set of , and is imposed by the volume conservation constraintwhich can be inverted explicitly to givewhere .
3.3. Primal (Forward) Problem
3.4. Dual (Adjoint) Problem
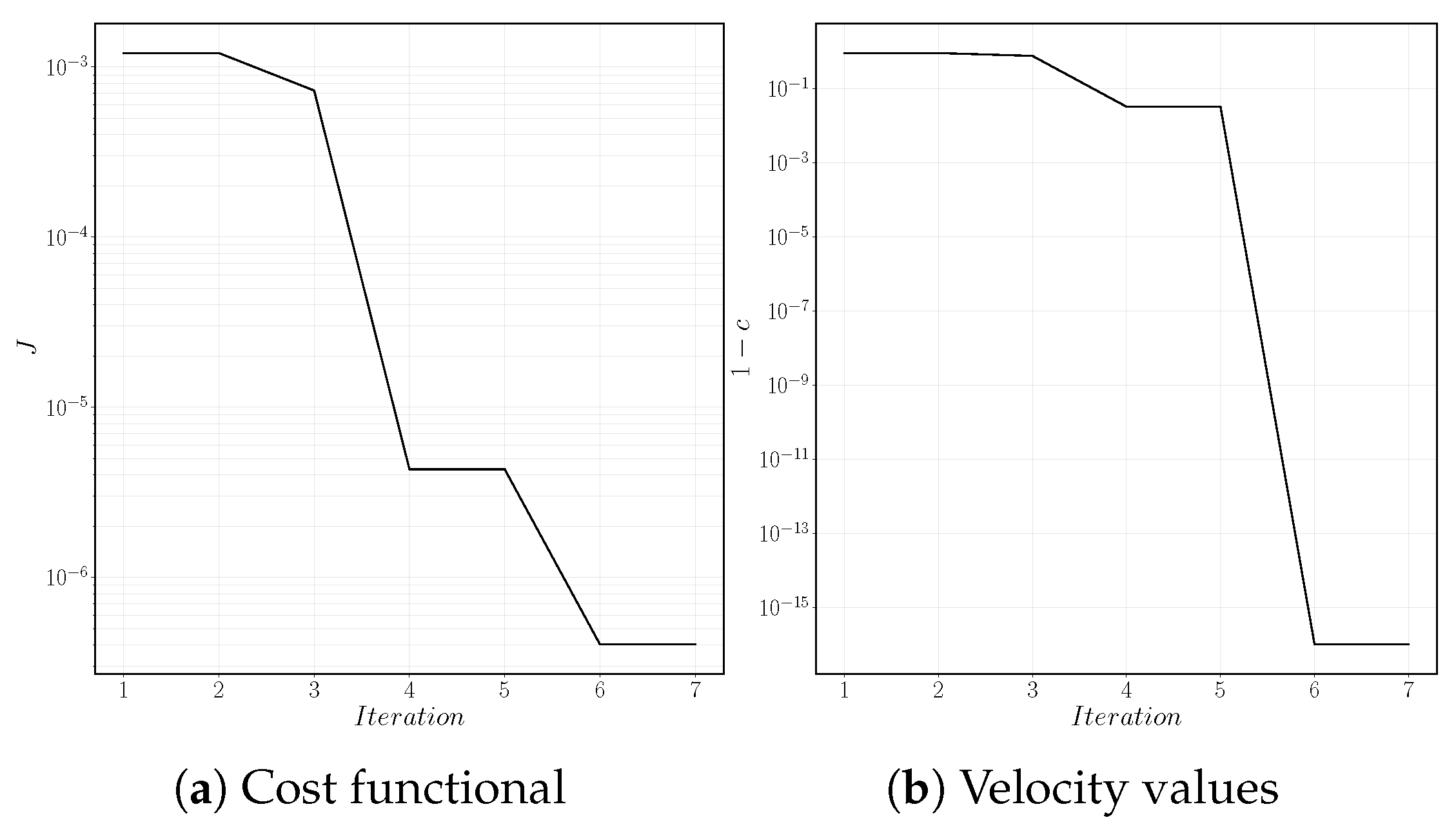
4. Optimisation Algorithm
| Algorithm 1: Optimization algorithm for Equation (1) |

|
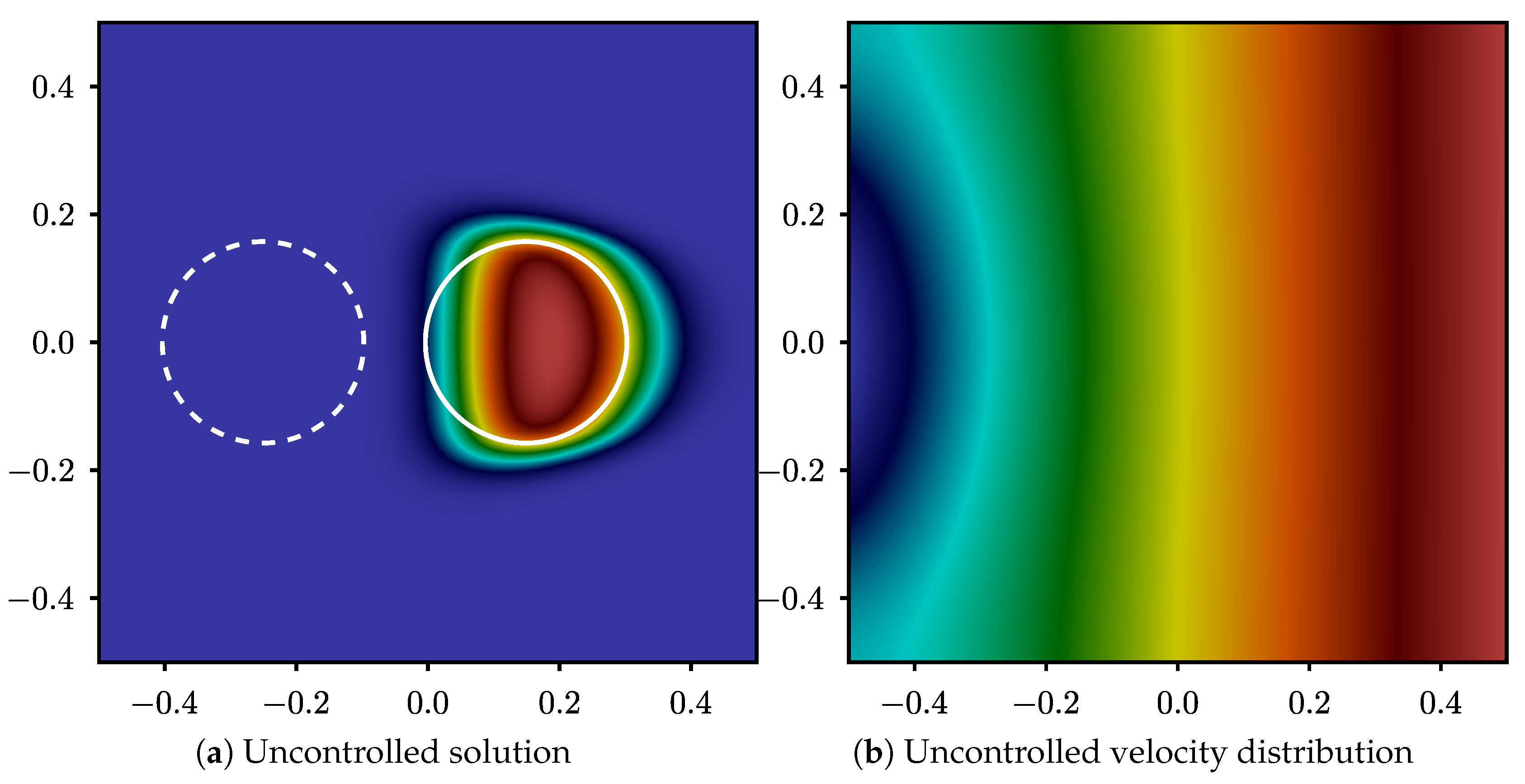
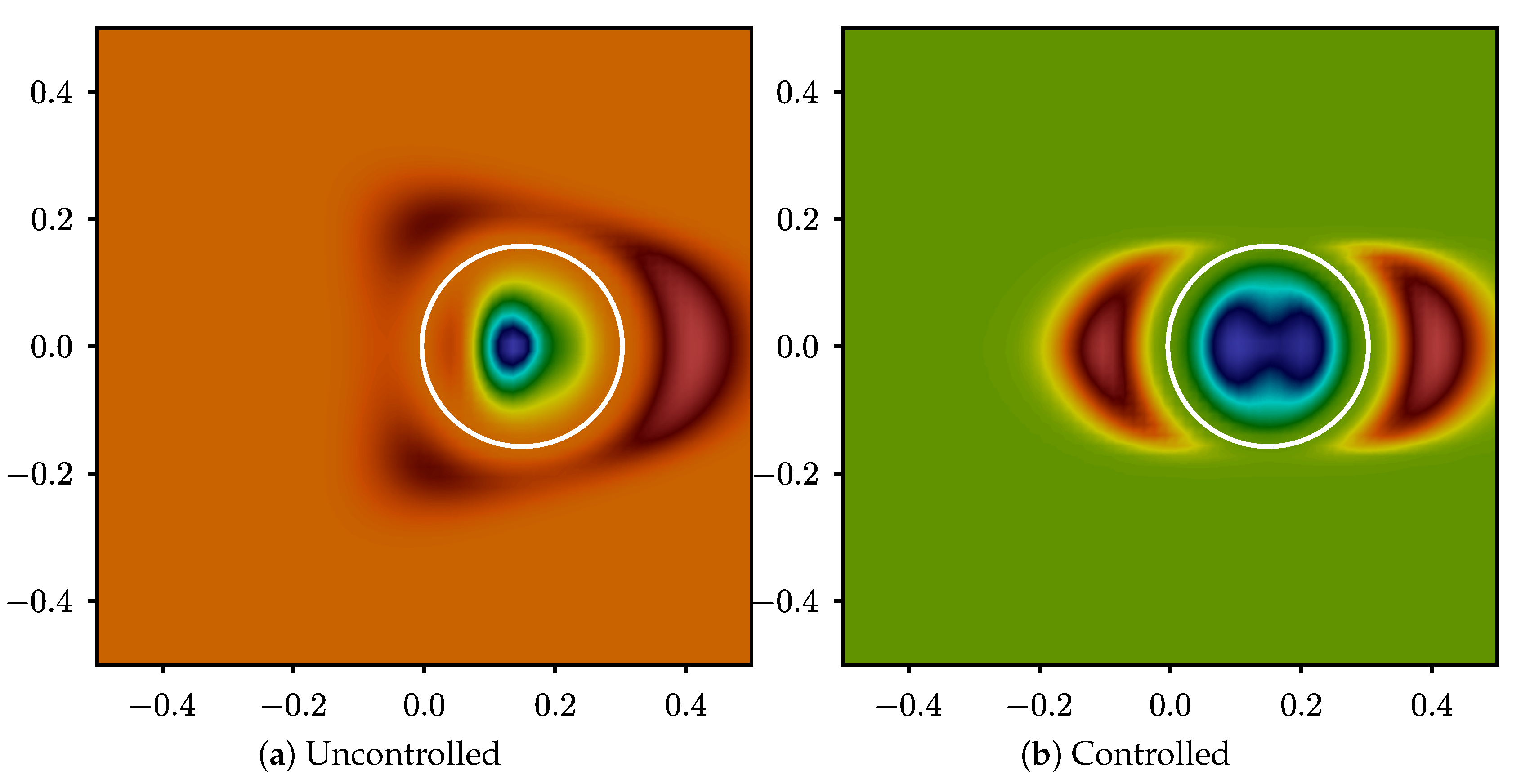
5. Results
5.1. Validation: One-Dimensional Droplets
5.2. Two-Dimensional Tests
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Mortazavi, M.; Le Chenadec, V.; Moin, P.; Mani, A. Direct numerical simulation of a turbulent hydraulic jump: Turbulence statistics and air entrainment. J. Fluid Mech. 2016, 797, 60–94. [Google Scholar] [CrossRef]
- Habla, F.; Fernandes, C.; Maier, M.; Densky, L.; Ferrás, L.L.; Rajkumar, A.; Carneiro, O.S.; Hinrichsen, O.; Nóbrega, J.M. Development and validation of a model for the temperature distribution in the extrusion calibration stage. Appl. Therm. Eng. 2016, 100, 538–552. [Google Scholar] [CrossRef]
- Fernandes, C.; Faroughi, S.A.; Carneiro, O.S.; Nóbrega, J.M.; McKinley, G.H. Fully-resolved simulations of particle-laden viscoelastic fluids using an immersed boundary method. J. Non Newton. Fluid Mech. 2019, 266, 80–94. [Google Scholar] [CrossRef] [Green Version]
- de Campos Galuppo, W.; Magalhães, A.; Ferrás, L.L.; Nóbrega, J.M.; Fernandes, C. New boundary conditions for simulating the filling stage of the injection molding process. Eng. Comput. 2020. [Google Scholar] [CrossRef]
- Khaliq, M.H.; Gomes, R.; Fernandes, C.; Nóbrega, J.M.; Carneiro, O.S.; Ferrás, L.L. On the use of high viscosity polymers in the fused filament fabrication process. Rapid Prototyp. J. 2017, 23, 727–735. [Google Scholar] [CrossRef]
- Le Chenadec, V.; Pitsch, H. A Conservative Framework For Primary Atomization Computation and Application to the Study of Nozzle and Density Ratio Effects. At. Sprays 2013, 23, 1139–1165. [Google Scholar] [CrossRef]
- Marsden, A.; Feinstein, J.; Taylor, C. A computational framework for derivative-free optimization of cardiovascular geometries. Comput. Methods Appl. Mech. Eng. 2008, 197, 1890–1905. [Google Scholar] [CrossRef]
- Pierret, S.; Coelho, R.; Kato, H. Multidisciplinary and multiple operating points shape optimization of three-dimensional compressor blades, Structural and Multidisciplinary Optimization. Comput. Methods Appl. Mech. Eng. 2007, 33, 61–70. [Google Scholar]
- Pironneau, O. On optimum design in fluid mechanics. J. Fluid Mech. 1974, 64, 97–110. [Google Scholar] [CrossRef]
- Jameson, A. Aerodynamic design via control theory. J. Sci. Comput. 1988, 3, 233–260. [Google Scholar] [CrossRef] [Green Version]
- Jameson, A.; Martinelli, L.; Pierce, N.A. Optimum Aerodynamic Design Using the Navier-Stokes Equations. Theor. Comp. Fluid Dyn. 1998, 10, 213–237. [Google Scholar] [CrossRef] [Green Version]
- Reuther, J.J.; Jameson, A.; Alonso, J.J.; Rimlinger, M.J.; Saunders, D. Constrained Multipoint Aerodynamic Shape Optimization Using an Adjoint Formulation and Parallel Computers, Part 2. J. Aircr. 1999, 36, 61–74. [Google Scholar] [CrossRef]
- Juniper, M. Triggering in the horizontal Rijke tube: Non-normality, transient growth and bypass transition. J. Fluid Mech. 2010, 667, 272–308. [Google Scholar] [CrossRef] [Green Version]
- Lemke, M.; Reiss, J.; Sesterhenn, J. Adjoint-based analysis of thermoacoustic coupling. AIP Conf. Proc. Am. Inst. Phys. 2013, 1558, 2163–2166. [Google Scholar]
- Nemili, A.; Özkaya, E.; Gauger, N.; Kramer, F.; Thiele, F. Discrete adjoint based optimal active control of separation on a realistic high-lift configuration. In New Results in Numerical and Experimental Fluid Mechanics X: Contributions to the 19th STAB/DGLR Symposium Munich, Germany, 2014; Springer: Berlin/Heidelberg, Germany, 2016; pp. 237–246. [Google Scholar]
- Schmidt, S.; Ilic, C.; Schulz, V.; Gauger, N. Three-dimensional large-scale aerodynamic shape optimization based on shape calculus. AIAA J. 2013, 51, 2615–2627. [Google Scholar] [CrossRef] [Green Version]
- Rabin, S.; Caulfield, C.; Kerswell, R. Designing a more nonlinearly stable laminar flow via boundary manipulation. J. Fluid Mech. R1 2014, 738, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Foures, D.; Caulfield, C.; Schmid, P. Optimal mixing in two-dimensional plane Poiseuille flow at finite Péclet number. J. Fluid Mech. 2014, 748, 241–277. [Google Scholar] [CrossRef] [Green Version]
- Cacuci, D.G.; Ionescu-Bujor, M. Adjoint sensitivity analysis of the RELAP5 MOD3.2 two-fluid thermal-hydraulic code system—I: Theory. Nucl. Sci. Eng. 2000, 136, 59–84. [Google Scholar] [CrossRef]
- Ionescu-Bujor, M.; Cacuci, D.G. Adjoint sensitivity analysis of the RELAP5 MOD3.2 two-fluid thermal-hydraulic code system—II: Applications. Nucl. Sci. Eng. 2000, 136, 85–121. [Google Scholar] [CrossRef]
- Bernauer, M.K.; Herzog, R. Implementation of an X-FEM solver for the Classical two-phase Stefan problem. SIAM J. Sci. Comput. 2011, 52, 271–293. [Google Scholar] [CrossRef]
- Bernauer, M.K.; Herzog, R. Optimal control of the classical two-phase Stefan problem in level set formulation. SIAM J. Sci. Comput. 2011, 33, 342–363. [Google Scholar] [CrossRef]
- Bernauer, M.K.; Herzog, R. Adjoint-based optimization of multi-phase flow through porous media—A review. Comput. Fluids 2011, 46, 40–51. [Google Scholar]
- Kataoka, I. Local instant formulation of two-phase flow. Int. J. Multiph. Flow 1986, 12, 745–758. [Google Scholar] [CrossRef]
- Gunzburger, M.D. Perspectives in Flow Control and Optimization; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2003. [Google Scholar]
- Xiao, F.; Ii, S.; Chen, C. Revisit to the THINC Scheme: A Simple Algebraic VOF Algorithm. J. Comput. Phys. 2011, 230, 7086–7092. [Google Scholar] [CrossRef] [Green Version]
- Fikl, A. Adjoint-Based Optimization for Hyperbolic Balance Laws in the Presence of Discontinuities. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2016. [Google Scholar]
- Fikl, A.; Le Chenadec, V.; Sayadi, T.; Schmid, P. A comprehensive study of adjoint-based optimization of non-linear systems with application to Burgers’ equation. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Giles, M.B. Discrete Adjoint Approximations with Shocks. In Hyperbolic Problems: Theory, Numerics, Applications; Hou, T.Y., Tadmor, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]








© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fikl, A.; Le Chenadec, V.; Sayadi, T. Control and Optimization of Interfacial Flows Using Adjoint-Based Techniques. Fluids 2020, 5, 156. https://doi.org/10.3390/fluids5030156
Fikl A, Le Chenadec V, Sayadi T. Control and Optimization of Interfacial Flows Using Adjoint-Based Techniques. Fluids. 2020; 5(3):156. https://doi.org/10.3390/fluids5030156
Chicago/Turabian StyleFikl, Alexandru, Vincent Le Chenadec, and Taraneh Sayadi. 2020. "Control and Optimization of Interfacial Flows Using Adjoint-Based Techniques" Fluids 5, no. 3: 156. https://doi.org/10.3390/fluids5030156
APA StyleFikl, A., Le Chenadec, V., & Sayadi, T. (2020). Control and Optimization of Interfacial Flows Using Adjoint-Based Techniques. Fluids, 5(3), 156. https://doi.org/10.3390/fluids5030156