1. Introduction
Due to the world’s ever-growing energy demand, the offshore wind industry has known an exponential growth during the last two decades. As a result, there is a strong tendency towards increasingly larger wind turbines being constructed offshore and cost-reduction per kilowatt hour, which poses new challenges regarding design and efficiency [
1,
2]. XL-monopiles are one such example. Offshore wind turbines have grown increasingly taller and are installed in deeper water depths than ever before, which jeopardizes their fatigue life due to a higher susceptibility to ringing and springing as their natural frequencies decrease further towards typical wave frequencies [
3]. Moreover, innovative structures combining wave energy take-off and harvesting wind energy, e.g., combined offshore wind and offshore airborne prototypes, confront designers with substantial differences in dynamic behavior compared to traditional structures stemming from the oil and gas industry. Especially in terms of prevailing fluid phenomena, viscous effects and turbulence gain considerable importance when assessing such structures.
Traditionally, design practices adopt Gaussian seas to represent operational conditions, while real seas are non-Gaussian [
4]. In modeling moderately severe wave climates, second-order wave theory is adopted, which gives rise to increased dynamic response for both stiff and compliant structures due to bound second-order wave components [
5]. However, in addition to bound components, free wave components are known to interact at third order of nonlinearity for intermediate to deep water wave conditions, which results in spectral energy downshifts and a higher probability of extremes compared to second-order wave theory [
6,
7]. Due to these spectral energy downshifts, the dynamic response of stiff structures is reduced [
8], while at the same time increased probability for extreme events, due to focussing, could lead to a higher occurrence of transient dynamic phenomena, such as ringing and slamming. An improved understanding of the influence of these nonlinear wave–wave interactions on the response statistics could therefore lead to a more appropriate assessment of offshore structures in operational conditions.
Expensive physical experiments in large-scale facilities and simplified engineering models originating from the offshore industry are still the norm. Most numerical models resolve the Euler equations, assuming incompressibility, irrotationality and inviscosity. Moreover, a Taylor expansion around the water level is used to approximate the kinematic and dynamic atmospheric boundary conditions imposed for the wave dynamics problem. As a result, linear potential theory based models, e.g., NEMOH, and expansions up to second-order, e.g., WAMIT, are still of main use, which is a clear consequence of offshore activities being situated in deep water, where second-order theory is generally assumed to capture most phenomena. However, as bottom-founded structures are situated closer to shore and higher-order wave effects, e.g., ringing, originate from higher-order wave harmonics, these models do not suffice in assessing state-of-the-art innovative offshore structures. Therefore, extensive research has been done in recent years to resolve the wave dynamics boundary value problem with fully nonlinear boundary conditions. Two such efforts are the nonlinear potential flow solvers OceanWave3D and formulations of the higher-order spectral equations (HOS). While OceanWave3D is essentially a fully nonlinear potential flow model [
9], HOS solves the Euler equations up to a desired level of nonlinearity in the (spectral) wave number domain [
10,
11]. By truncating up to third-order nonlinearity, HOS has shown to accurately capture the effect of nonlinear four-wave interactions on extreme wave statistics [
12]. Nonetheless, all of the aforementioned models still lack in the sense that they do not model viscosity nor turbulence.
As computational fluid dynamics (CFD) solves the full Reynolds-averaged Navier–Stokes (RANS) equations, it overcomes the problems previously posed by the Euler based models, therefore allowing for viscosity and turbulent effects to be taken along [
13]. CFD accurately captures the wave–structure interaction, even in highly nonlinear waves. A notable code is the open-source CFD solver OpenFOAM, of which different branches exist and to which researchers worldwide contribute. Notwithstanding the continuously growing computational resources, these models remain computationally demanding, which makes for a real challenge in applying them to large, high resolution domains and long computational times. Consequently, CFD is often used in conjunction with faster models as part of a domain decomposition approach.
In Paulsen et al. [
14,
15], such a domain decomposition approach was adopted to model respectively wave impact and ringing for monopiles, where the previously mentioned fully nonlinear potential flow solver OceanWave3D as far-field was used in conjunction with OpenFOAM modeling the near-field through coupling by the wave generation and (passive) absorption toolbox waves2Foam. At the near-field boundaries, numerical relaxation zones, which gradually force the computated wave field to comply with the theoretical wave field calculated through the fully nonlinear far-field solver, were applied [
16]. A similar strategy was applied in studying breaking of rogue waves arising from modulational instability in a wave train consisting of a carrier wave and side-band perturbations, where a domain decomposition was adopted between the higher-order spectral model (HOSM) and OpenFOAM. First, an initial wave train was simulated in HOSM until a certain threshold for wave height was reached. Subsequently, this wave surface was fed to the wave maker in the wave generation and (active) absorption toolbox olaFlow to closely study the breaking, for which HOSM does not account [
17]. More recently, adopting CFD for both the far field and near field, Di Paolo et al. [
18] presented a coupling approach with a 2D CFD model representing the far field and a 3D CFD model for the near field, foregoing the limitations associated with potential flow models. However, adopting this approach would still be too time-consuming in studying long time series, as is the case in this work, and CFD also invokes inaccuracies in its long-distance progressive wave modeling [
19].
Alternatively, in Luquet et al. [
20], field decomposition through the Spectral Wave Explicit Navier-Stokes Equations (SWENSE) approach has been proposed as a way of coupling the computationally efficient HOS solver to fully nonlinear wave tanks. First, the flow field potential is decomposed into the HOS potential and the near field solution in the numerical wave tank. Next, after evaluating the HOS potential, the nonlinear wave tank potential is solved for with the HOS potential as free surface boundary condition. Finally, adding both potentials produces the full flow field potential. SWENSE therefore allows for fast parallellized computations for both the far field solutions in HOS and the near field solutions in numerical wave tanks. In the OpenFOAM branch, foam-extend, this very same strategy has been successfully implemented together with similar passive absorption boundary conditions as in Jacobsen et al. [
16] to prevent waves from reflecting into the near field. In doing so, both extreme wave simulations and the accurate assessment of near field effects on the structure have become possible [
21,
22]. However, although this approach is very effective in obtaining realistic extreme waves arising from an initial wave field and in studying their impacts on offshore structures, HOS essentially resolves the time evolution of an initial wave field. Therefore, this approach is as such less suited for deriving structural response statistics regarding the spatial evolution of random seas and the nonlinear wave–wave interactions involved, which have shown to lead to a departure from Gaussian statistics [
7,
23].
This work presents an efficient numerical strategy in generating sufficient data to assess the effect of the interacting free wave components on the response of a stiff monopile. The response statistics for a simple offshore structure in non-Gaussian seas are studied in the time domain. To this end, an efficient domain decomposition strategy, where the near field is modeled through CFD and the far field through a fast HOS numerical wave tank model, is adopted. The purpose of this work is to show that such a domain decomposition strategy is an effective and efficient way to study the response characteristics of a structure under wave loads. In the following, first, the methodology of the domain decomposition strategy is discussed. Next, the set-up and numerical input of far field, near field and structural test case are laid out. Based on the thus established models, a benchmark study for the domain decomposition strategy with emphasis on convergence is presented, after which, the simplified structural model’s validity is assessed. Finally, a discussion takes place considering the ability of the developed time domain approach regarding response statistics in non-Gaussian seas, proving that the model is able to live up to expectations, but, however efficient, still becomes too expensive in view of the multiple long Monte Carlo simulations needed for the response statistics to be representative.
4. Results
4.1. Benchmark for the Wave Field
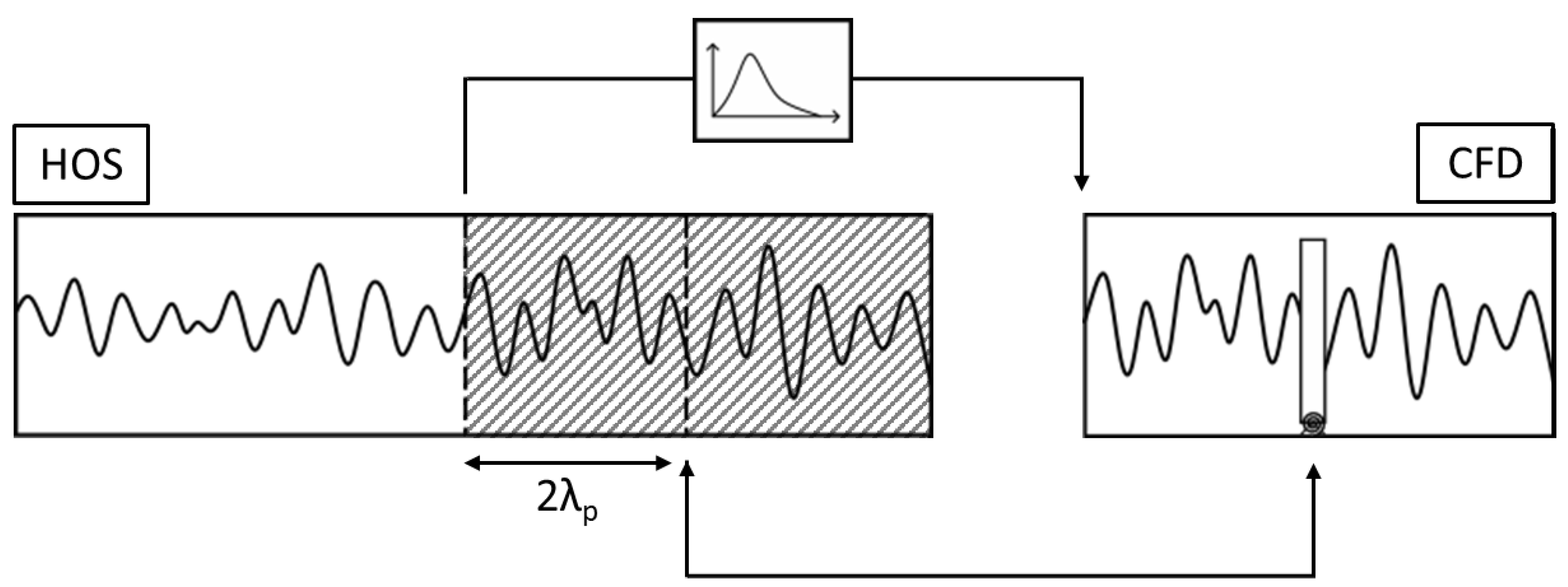
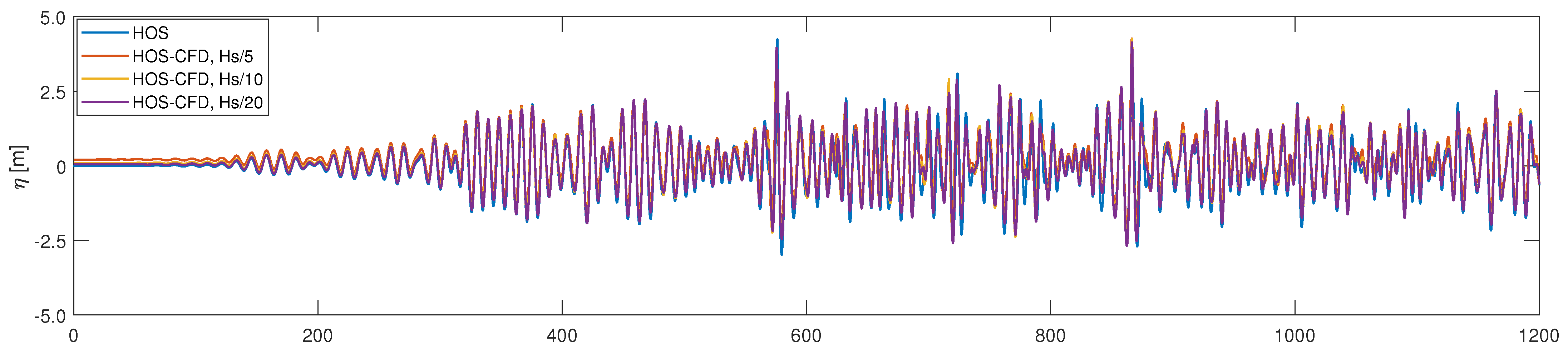
Before running the fully coupled HOS-CFD model, a benchmark study was conducted to verify the validity of the proposed domain decomposition strategy regarding the wave fields involved and to identify probable discrepancies between the HOS solution and the coupled HOS-CFD solution and their causes. In doing so, first, the HOS model has been used to compute the wave series at 23 peak wavelengths from the models’ wave maker. Next, the time series obtained two peak wavelengths back, was applied to the near field boundary and the CFD model was used to let the wave further evolve. Finally, the time series logged at the location of the would-be structure in the CFD model was compared to the original time series obtained at that very same position in the HOS model. The result is presented in
Figure 5 for three different near field mesh resolutions, i.e., Hs/5, Hs/10 and Hs/20.
From
Figure 5, it can be clearly seen that the signals of the coupled HOS-CFD and of HOS-NWT correspond closely both in terms of phases and peaks for all considered mesh resolutions. As mesh resolution increases, the reconstructed signal in HOS-CFD converges to the target signal obtained from HOS-NWT. Good agreement is found for Hs/20, although the signal corresponding to a resolution Hs/10 is a very close second. As optimal reconstruction of the target signal is key in this work, Hs/20 will be withheld in further considerations. Occasionally, slight underestimations are observed for the waves compared to their HOS counterparts. These underestimations are rather small at the beginning of the time series, but grow more pronounced towards the end. Two explanations for these observed differences in peak values seem plausible.
Firstly, no breaking model is included in HOS-NWT, while waves in OpenFOAM might prematurely break, i.e., before reaching their breaking limit, or lose energy to dissipation. Although publicly available HOS-NWT does not incorporate breaking models and dissipation, it does include a limit to the steepness above which the computation breaks down. Still, large peaks that overshoot the physics might be encountered. On the contrary, OpenFOAM’s interFoam solver does include viscosity and two-phase fluid interaction through diffusive transport equations for cell water fractions. The evolution of wave fields can therefore be expected to be more realistic in the sense that they are allowed to break. However, due to the dissipative nature of these transport equations, waves might lose energy to numerical dissipation. Therefore, a breaking detection was performed on the HOS output signal for
with
a the wave amplitude,
the wave frequency and
the wave limiting steepness. As this condition is only applicable for linear waves, the assessment of the wave breaking is based on a characteristic wave amplitude and characteristic wave frequency computed for each time instance by applying wavelet analysis along the lines of Liu and Babanin [
33] with a limiting value,
, of 0.2. As can be seen from
Figure 6, the considered wave field from HOS is in no danger of breaking.
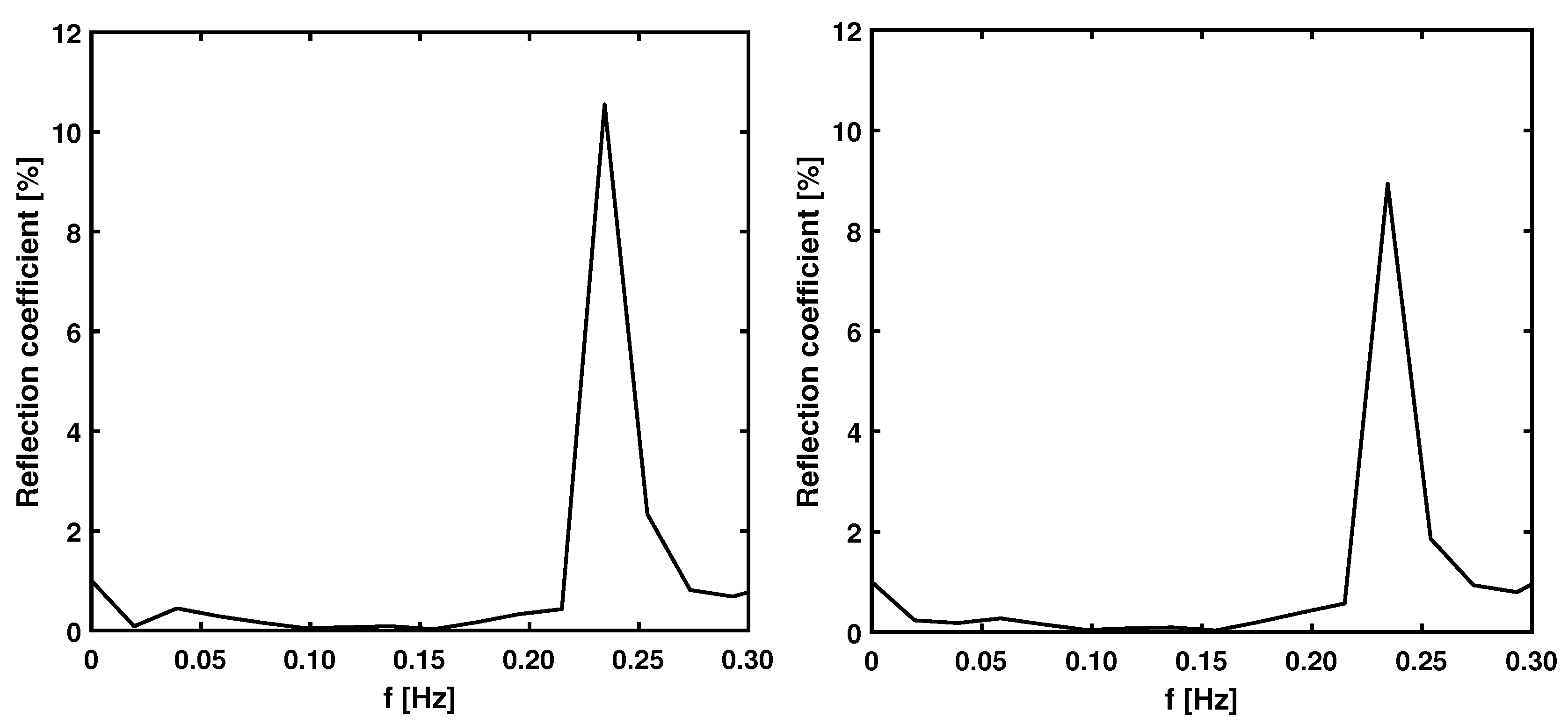
On the other hand, the differences in peak values could be attributed to the different wave absorption strategies used in HOS-NWT and the CFD model; in HOS-NWT a passive absorption based on numerical relaxation is applied, while in olaFlow active (shallow water) absorption combined with additional numerical dissipation is adopted. Therefore, a reflection analysis according to Mansard and Funke [
30], has been applied to both HOS-NWT and CFD at the same respective positions. When comparing the reflection coefficients in
Figure 7, it is clear that HOS-NWT shows larger reflection at the high frequencies.
Notwithstanding, the known inaccuracies of the reflection analysis with respect to the high-frequency tail, about 9% reflection can be noted in the high-frequency tail for CFD, while approximately 11% reflection is shown for HOS-NWT. Both models display small values for the reflection coefficient in the low-frequency tail as well. The values for the reflection coefficient for the HOS-NWT model are generally higher than the ones for the CFD model. This difference in absorbing long waves can be explained by the inherent differences between the active and passive wave absorption applied. As olaFlow is aimed at absorbing shallow water waves, it simply absorbs long waves best. Furthermore, in HOS-NWT, a numerical relaxation zone of two peak wavelengths is used, resulting in the increased reflection of wave components slightly longer than this zone.
The waves obtained by both the CFD and the coupled HOS-CFD model collide remarkably well. Discrepancies can most certainly be attributed to the differences in absorption strategy.
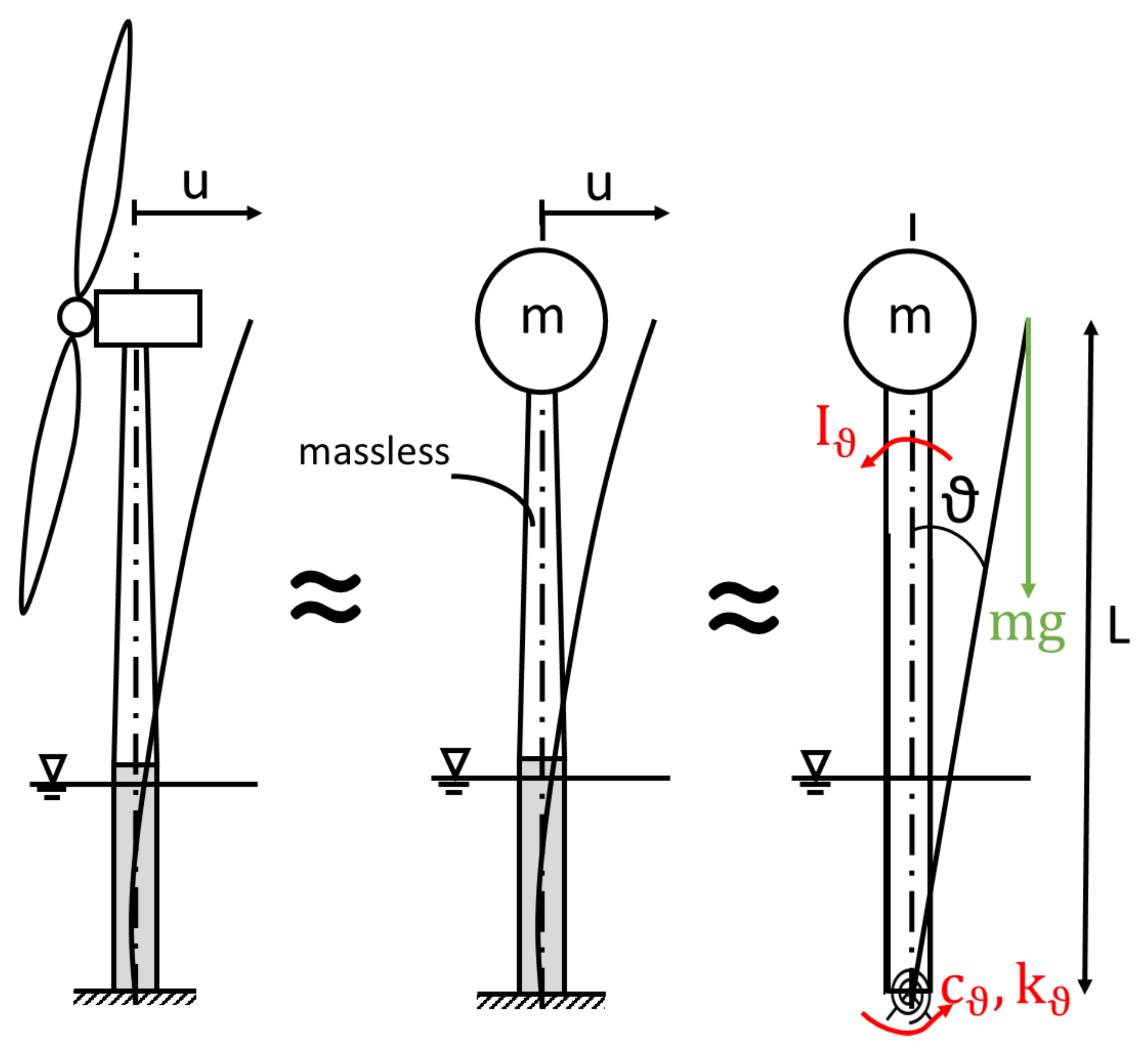
4.2. Verification of the Equivalent Monopile
In order to verify the applied simplified inverted pendulum model and to improve the understanding of the wave–structure interaction results further on, a free decay test for the model’s pitch motion has been conducted in the numerical wave flume.
Figure 8 shows the pitch motion,
, as it decays in time. Applying modal analysis through the MATLAB toolbox MACEC 3.3 [
34], the natural frequency and the damping ratio are defined as respectively 0.253Hz and 1.4%, which lies close to the target values earlier defined in
Table 1.
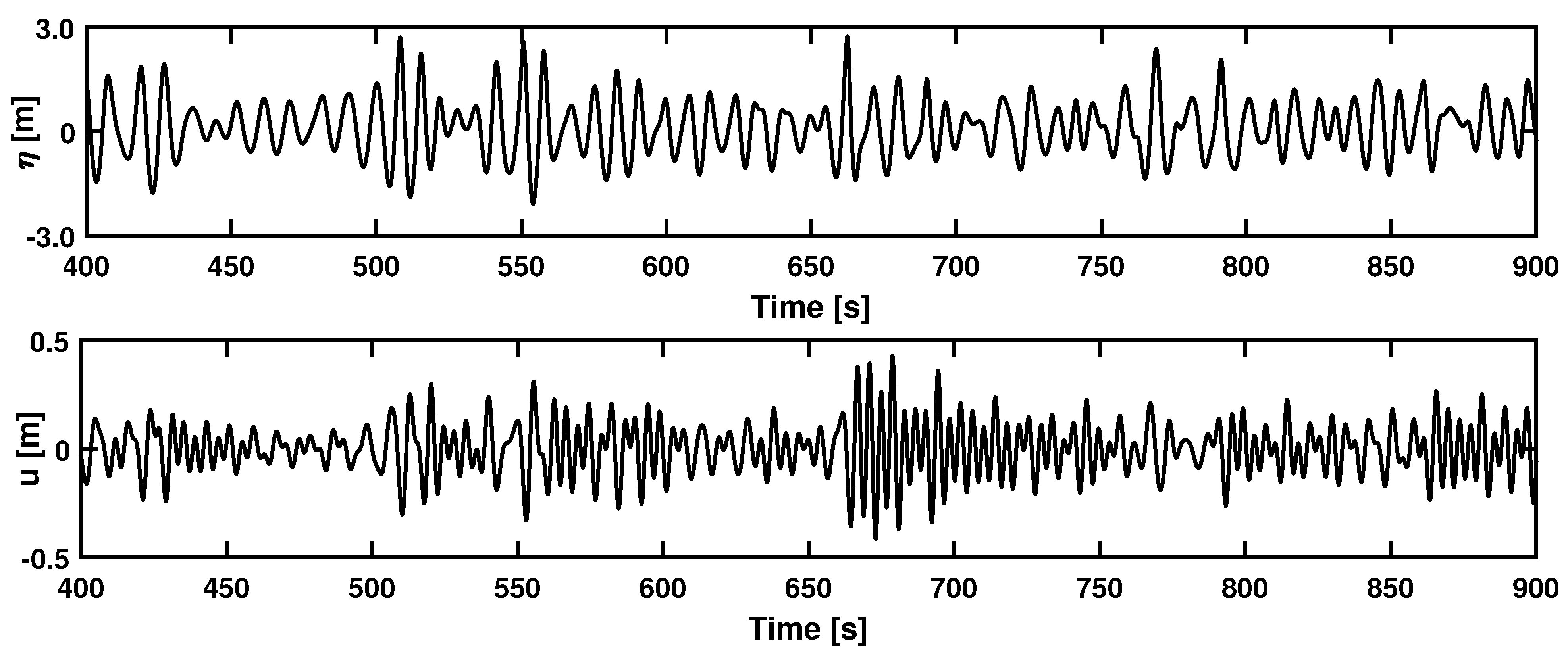
Furthermore, as can be seen from
Figure 9, the equivalent monopile response closely mimics the wave elevation, which is expected as the natural frequency is situated on the right-hand side of the wave peak frequency. The high-frequency stiff monopile response is superposed onto the quasi-static response to the waves. Even for the short window presented, multiple high-frequency events can be noted. The most notable one is situated in between 650 and 700 s and corresponds most plausibly to a typical high-frequency ringing event; the response appears to build up over several periods and subsequently decays.
The equivalent monopile is therefore not only able to reproduce the monopile’s structural properties, it captures its typical high-frequency behavior as well. Having verified the validity of both the domain decomposition and the equivalent monopile, in the remainder of this work, some statistics regarding the waves and the responses will be drawn and their reliability will be assessed.
4.3. Application to Obtaining Non-Gaussian Response Statistics
While adopting the same wave parameters as previously used for the benchmark study, the applicability of the proposed domain decomposition strategy to obtaining response statistics for structures in non-Gaussian seas is hereafter studied. Seven Monte Carlo realizations of about 500 peak waves have been simulated for three wave spectra with different peak wave factors; i.e., 1, 3.3 and 6. The input spectra were chosen to contain similar energy content, i.e., same zero-order moment, , or standard deviation, . Using different spectral peak factors changes the shape of the wave spectrum with the spectrum corresponding to classified as broad-banded and the one with being narrow-banded.
Narrow-banded spectra are known to be especially prone to a special case of resonant wave–wave interactions, the so-called Benjamin–Feir instability, which modulates a wave train originally narrow-banded by exchanging energy with its close side-bands. As the Benjamin–Feir instability modulates narrow-banded wave trains, it is a considered to be a plausible candidate in explaining the formation of freak waves [
35]. The Benjamin–Feir instability manifests itself to differing degrees in long-crested deep to intermediate water wave trains (
) [
7,
23]. Onorato et al. [
36] summarized the influence of bandwidth and water depth on the occurrence of the Benjamin–Feir instability in the Benjamin–Feir index (BFI) as
with factors
and
for finite water depths defined as
The Benjamin–Feir indices for the herein considered wave spectra then become 0.09, 0.58 and 0.73 for respectively , the highest BFI incorporating the fact that instabilities will most likely occur for narrow-banded spectra.
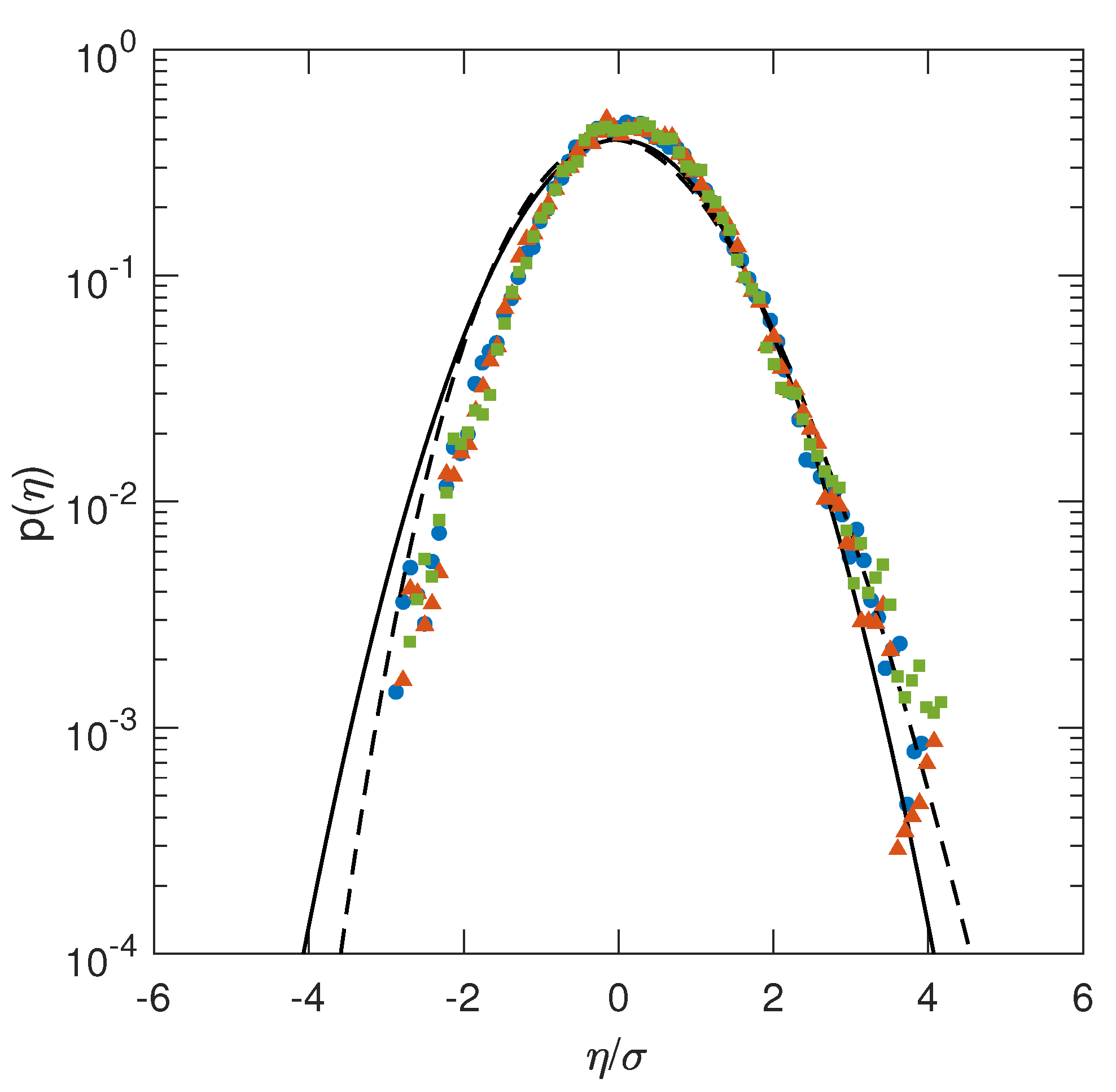
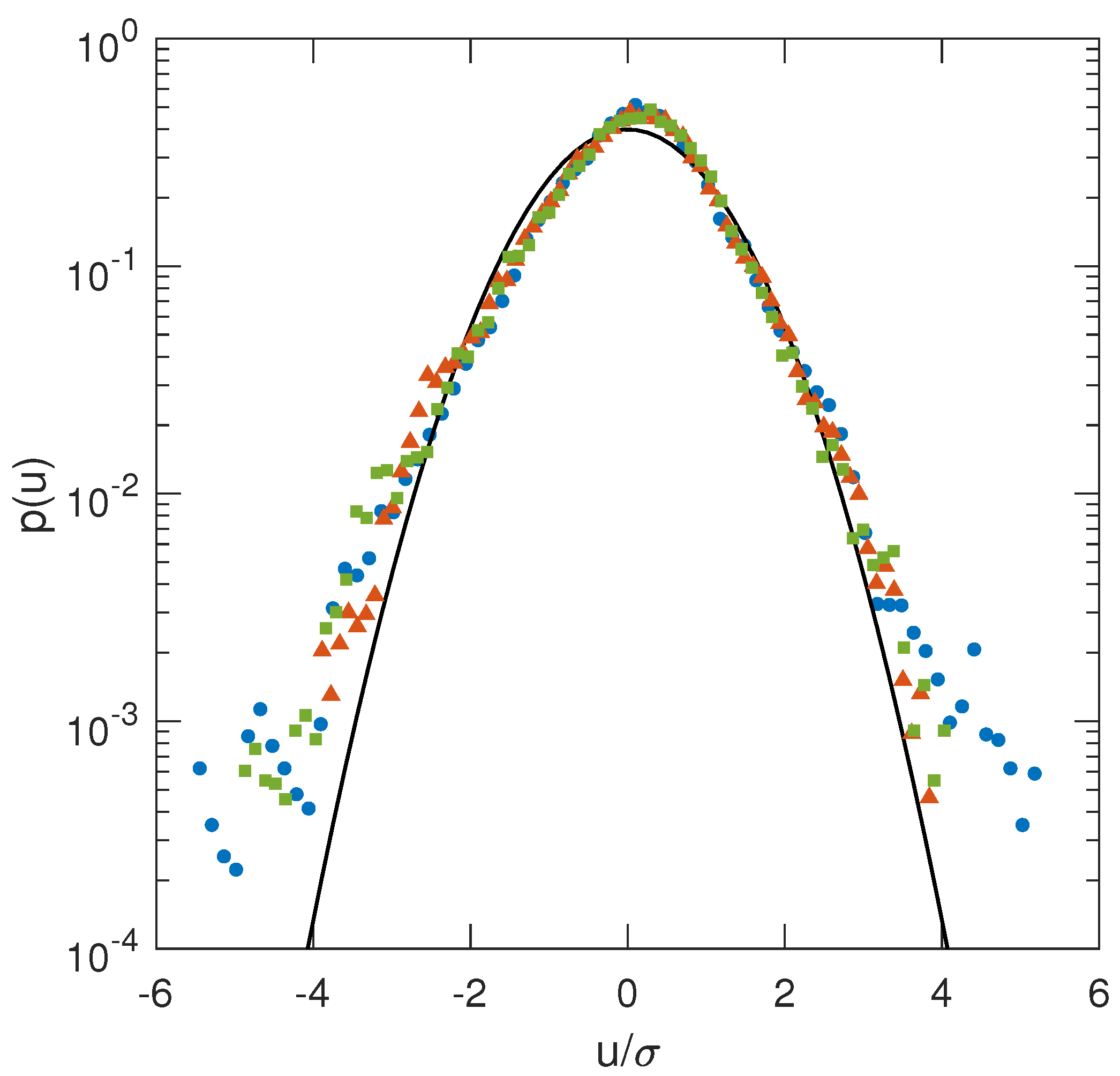
Figure 10 shows the probabilities of the wave elevations captured in the near field for the three wave spectra considered. These wave elevations correspond to the sea state captured at 23 peak wavelengths from the wave maker in the far field. For the sake of comparison, all wave elevations are normalized by their standard deviation
. In addition, the normal probability density function and its second-order correction, computed along the lines of Tayfun [
37], are shown. From
Figure 10, all realizations appear to be skewed with respect to the Gaussian. The positive surface elevations evidently conform closest to the Tayfun distribution. However, the negative values overestimate the values expected for typically second-order waves. Furthermore, not much can be said regarding the differences between the spectra.
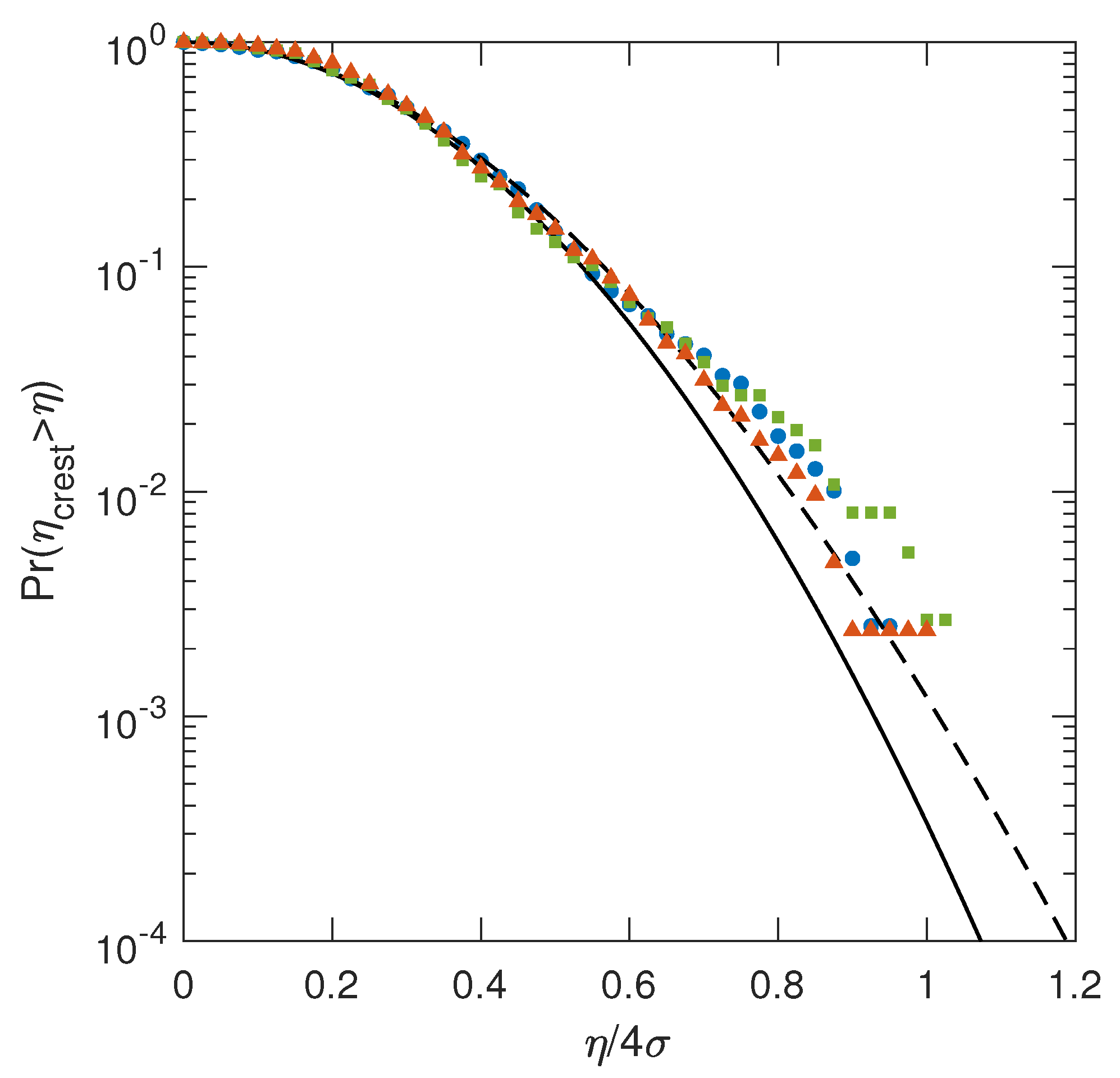
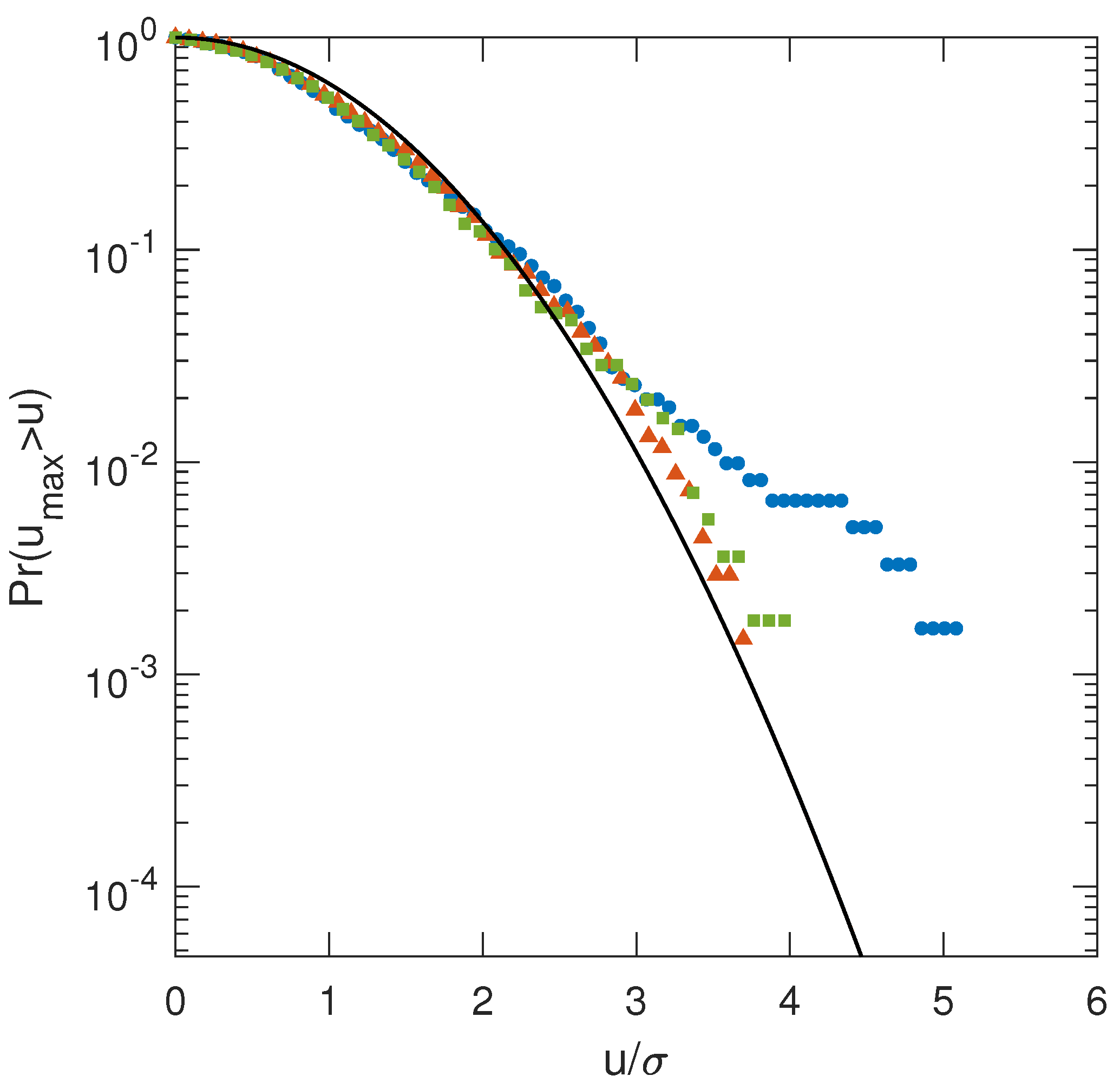
In
Figure 11, the probability distributions for the wave crests are shown. The thresholds have been normalized by their wave height, i.e.,
. For comparison, the Rayleigh distribution, to which wave crests for linear waves tend, are drawn together with the Tayfun distribution for second-order wave crests. As expected, the wave crests resulting from all three wave specra conform best to the Tayfun distribution. Depending on the bandedness of the spectra, differences in wave crest distribution can be noted as well. For the largest BFI, corresponding to the narrow-banded case, strongest deviations from the Tayfun distribution can be noted. Overall, the statistics presented in
Figure 11 are in strong agreement with the works by Onorato et al. [
36] and Toffoli et al. [
7].
Figure 12 shows the tower top excursions with respect to the Gaussian. All displacements have been normalized by their respective standard deviation. The skewness of the responses compared to the Gaussian appears to reflect the skewness originally found for the probability density function of the wave elevations in
Figure 10. Compared to
Figure 10, the lower and upper tails seem to be heavier and clear differences are noted depending on wave spectral bandedness. The tails seem to be heaviest for the broad-banded specrum, corresponding to lowest BFI, while the narrow-banded wave spectrum results in slightly heavier tails than does the response spectrum corresponding to
.
Moreover,
Figure 13, depicting the probability distribution for the tower top displacements, appears to confirm the more extreme responses already found in the upper tail in
Figure 12 for the broad-banded spectrum. Similarly, the narrow-banded spectrum results in more extreme responses than does the wave spectrum lying in between.
The largest response noted for the broad-banded spectrum could be attributed to its heavier high-frequency spectral tail, which continuously excites the tower’s first fore-aft bending resonant frequency. The remaining narrower-banded wave spectra have similar energy in their tails, with the narrowest-banded wave spectrum having obviously the least. Interestingly though, the narrowest-banded wave spectrum results in larger response than does the wave spectrum corresponding to . Therefore, energy considerations probably not tell the full story.
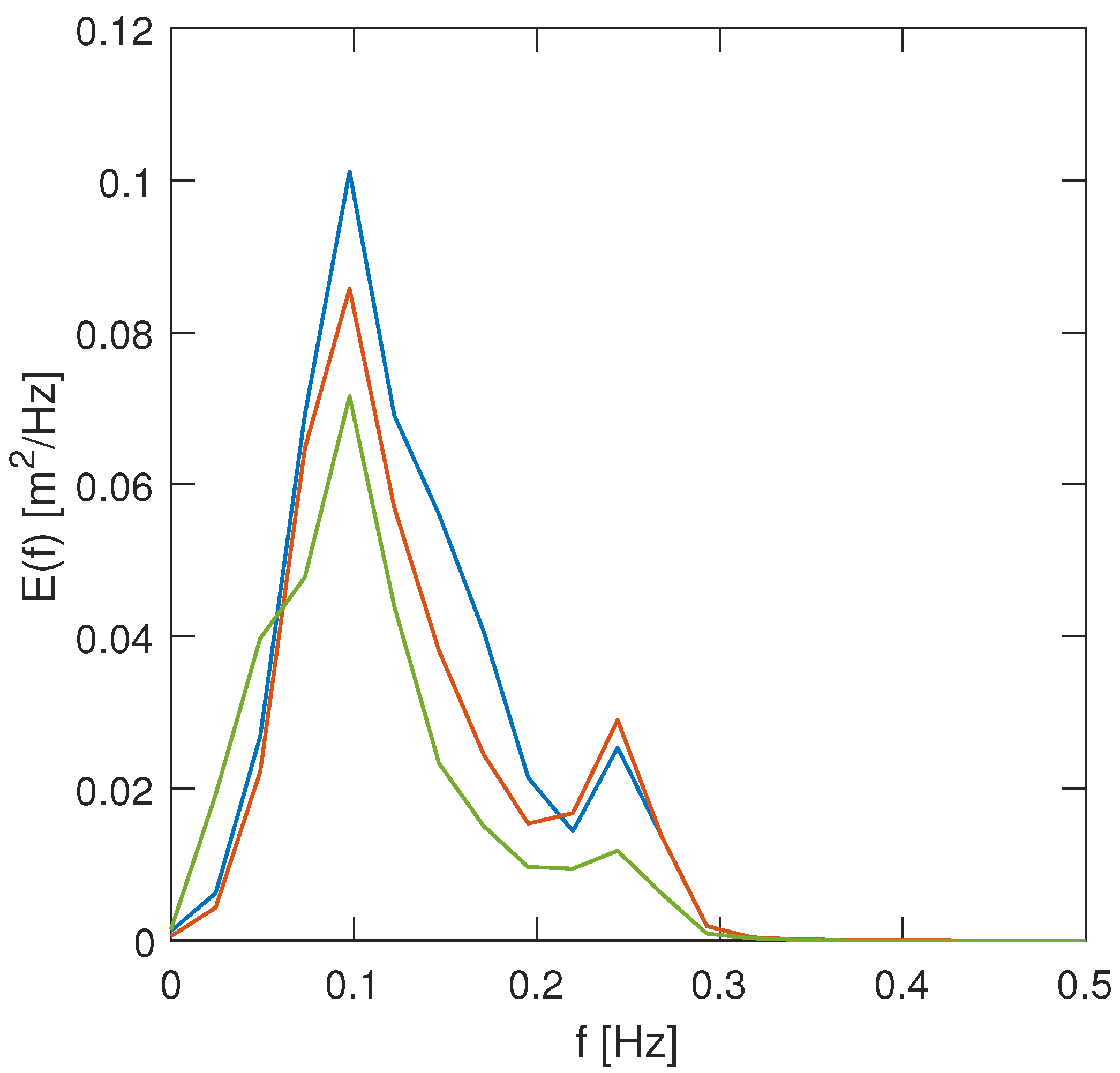
Figure 14, depicting the response spectra for the considered wave spectra smoothed using a Hann window of 512 samples (sampled at 50 Hz) and averaged over the seven realizations, shows that indeed the broad-banded wave spectrum results in highest response in its tail. The second broadest wave spectrum appears to do so as well. The narrow-banded spectrum shows overall the least energy. Therefore, it is most plausible that the larger response for the narrowest-banded spectrum as noted in
Figure 13 originates from the larger waves associated with the higher probability of occurrence of the Benjamin–Feir instability. Moreover, looking at the response spectra, one would expect the response at the wave spectral peak to be largest for the narrow-banded wave spectrum and smallest for the broad-banded wave spectrum.
5. Discussion
From the above presented results, the proposed domain decomposition strategy is clearly able to both reproduce the non-Gaussianity of the wave field obtained from HOS-NWT with remarkable accuracy and capture some interesting dynamic response phenomena. Furthermore, a link appears to exist between the non-Gaussian wave statistics obtained through the decomposed model and the perceived simplified monopile responses, indicating that the model could be applied to studying the impact of nonlinear wave–wave interactions in offshore structural response. During this study, the question was raised of whether such a model would be able to generate enough data for converged response statistics. In answering this question, three points have to be considered: the extent of the data gathered and the sampling rate; the availability of computational resources; and most importantly, the response characteristics of the structure under consideration.
Regarding the first point, reducing the sampling frequency by five could deliver data at one-third of the above-mentioned computational costs as a large overhead exists in CFD in writing data to disk space, still leaving us at 7 × 1 week of computational time on five Intel Xeon CPU’s E5-2680 v2 at 2.8 GHz × 20. per wave spectral case. Having sufficient computational resources, simulating for two months would deliver enough data, i.e., ±10,000 waves, for a simple stiff structures as is the monopile. This is in line with the amount of waves previously used in studying modulational instability as one of the mechanisms underlying extreme wave formation [
7].
For the monopile, the results indicate that nonlinear wave–wave interactions have their influence on its response statistics. Obviously, the Pierson–Moskowitz spectrum continuously excites the first fore-aft bending natural frequency due to its relatively high energy content in its high-frequency tail. However, results also indicate that although its limited energy content in the upper spectral tail, narrow-banded wave spectra might lead to larger response maxima than does a traditional JONSWAP spectrum characterized by
. Based on the premise that narrow-banded waves lead to a higher occurrence of extreme waves and taking into account the ringing observed in
Figure 9, a plausible guess could be that ringing more often occurs for these narrow-banded spectra. The above presented results agree with what would be expected from literature and therefore confirm the applicability of the proposed model in studying response statistics in non-Gaussian seas. Nonetheless, it has to be borne in mind that these preliminary observations are based on statistics that are not converged yet.
When considering compliant floating structures, eigenfrequencies are about an order of magnitude lower than, e.g., the monopile’s first natural frequency. Many more data would therefore be needed to arrive at converged response statistics for compliant structures. The bottleneck lies in the number of realizations of the slow difference frequency response realizations rather than the amount of waves. Computations are expected to become truly demanding in cases of 3D motion and directional wave fields, rendering the previously applied symmetry plane invalid. Therefore, although the model has shown to be able to capture the response phenomena related to nonlinear wave–wave interactions in non-Gaussian seas, and the estimate of the cost required for converged results for stiff offshore structures seems reasonable, the proposed methodology is not expected to be feasible for 3D motion, directional wave fields and compliant structures.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}