
Frequency and Amplitude Modulations of a Moving Structure in Unsteady Non-Homogeneous Density Fluid Flow

 ,
, 
Abstract
:
1. Introduction
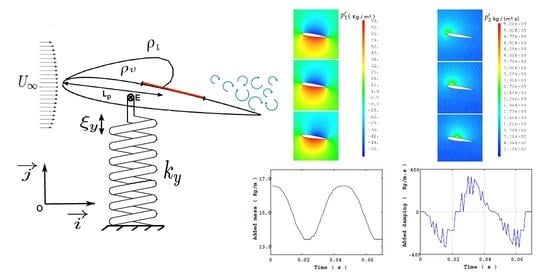
2. Fluid Loads Acting on the Immersed Structure
Added Mass and Added Damping
3. Structure Dynamics Modeling
4. Non-Homogeneous Density Model
5. Numerical Resolution
5.1. Steady Cavity Length
5.2. Unsteady Cavity Length
5.3. Frequency Analysis
5.3.1. Empirical Mode Decomposition
- (i)
- The number of local extrema and the number of zero-crossings must either equal or differ at most by one.
- (ii)
- The local trend value (mean) of the envelope defined by local maxima and the envelope defined by the local minima is zero
5.3.2. Hilbert Spectral Analysis
5.3.3. IMFs and IFs of the Signal
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Morand, H.J.P.; Ohayon, R. Fluid Structure Interaction; John Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Axisa, F. Modélisation des Systèmes Mécaniques: Interactions Fluide-Structure; Hermès Science Publ.: Paris, France, 2001. [Google Scholar]
- Sigrist, J.F. Fluid-Structure Interaction: An Introduction to Finite Element Coupling; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Coutier-Delgosha, O.; Stutz, B.; Vabre, A.; Legoupil, S. Analysis of cavitating flow structure by experimental and numerical investigations. J. Fluid Mech. 2007, 578, 171–222. [Google Scholar] [CrossRef] [Green Version]
- Ross, M.R.; Felippa, C.A.; Park, K.; Sprague, M.A. Treatment of acoustic fluid-structure interaction by localized Lagrange multipliers: Formulation. Comput. Methods Appl. Mech. Eng. 2008, 197, 3057–3079. [Google Scholar] [CrossRef]
- Ross, M.R.; Sprague, M.A.; Felippa, C.A.; Park, K. Treatment of acoustic fluid-structure interaction by localized Lagrange multipliers and comparison to alternative interface-coupling methods. Comput. Methods Appl. Mech. Eng. 2009, 198, 986–1005. [Google Scholar] [CrossRef]
- Young, Y. Time-dependent hydroelastic analysis of cavitating propulsors. J. Fluids Struct. 2007, 23, 269–295. [Google Scholar] [CrossRef]
- Young, Y. Fluid-structure interaction analysis of flexible composite marine propellers. J. Fluids Struct. 2008, 24, 799–818. [Google Scholar] [CrossRef]
- Amromin, E.; Kovinskaya, S. Vibration of cavitating elastic wing in a periodically perturbed flow: Excitation of subharmonics. J. Fluids Struct. 2000, 14, 735–751. [Google Scholar] [CrossRef]
- Benaouicha, M.; Astolfi, J.; Ducoin, A.; Frikha, S.; Coutier-Delgosha, O. A numerical study of cavitation induced vibration. In Proceedings of the ASME 2010 Pressure Vessels and Piping Division/PVP Conference, Bellevue, WA, USA, 18–22 July 2010. [Google Scholar]
- Benaouicha, M.; Astolfi, J.A. Analysis of added mass in cavitating flow. J. Fluids Struct. 2012, 31, 30–48. [Google Scholar] [CrossRef] [Green Version]
- Huang, E.N.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the hilbert spectrum for non-linear and non-stationary times series analysis. Proc. R. Soc. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Benaouicha, M.; Astolfi, J. On Some Aspects of Fluid-Structure Interaction in Two-Phase Flow. In Proceedings of the ASME 2013 Pressure Vessels and Piping Conference, Paris, France, 14–18 July 2013; p. 9. [Google Scholar]
- Leroux, J.B.; Coutier-Delgosha, O.; Astolfi, J.A. A joint experimental and numerical study of mechanisms associated to instability of partial cavitation on two-dimensional hydrofoil. Phys. Fluids 2005, 17, 52–101. [Google Scholar] [CrossRef] [Green Version]
- Astolfi, J.A. Some Aspects of Experimental Investigations of Fluid Induced Vibration in a Hydrodynamic Tunnel for Naval Applications. In Flinovia-Flow Induced Noise and Vibration Issues and Aspects-III; Ciappi, E., De Rosa, S., Franco, F., Hambric, S.A., Leung, R.C.K., Clair, V., Maxit, L., Totaro, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2021; ISBN 978-3-030-64806-0. [Google Scholar]
- Stutz, B.; Reboud, J. Experiments on unsteady cavitation. Exp. Fluids 1997, 22, 191–198. [Google Scholar] [CrossRef]
- Joussellin, F.; Delannoy, Y.; Sauvage-Boutar, E.; Goirand, B. Experimental investigations on unsteady attached cavities. Cavitation ASME-FED 1991, 91, 61–66. [Google Scholar]
- Frikha, S. Étude Numérique et Expérimentale Des écoulements Cavitants sur Corps Portants. Ph.D. Thesis, Arts et Métiers ParisTech, Lille, France, 2010. [Google Scholar]
- Kane, C.; Marsden, J.; Ortiz, M.; West, M. Variational integrators and the Newmark algorithm for conservative and dissipative mechanical systems. Int. J. Numer. Methods Eng. 2000, 49, 1295–1325. [Google Scholar] [CrossRef]
- Combescure, A.; Hoffmann, A.; Pasquet, P. The CASTEM finite element system. In Finite Element Systems; Springer: Berlin/Heidelberg, Germany, 1982; pp. 115–125. [Google Scholar]
- Blevins, R. Formulas for Natural Frequency and Mode Shape; Van Nostrand Reinhold: New York, NY, USA, 1979. [Google Scholar]
- Boudraa, A.; Cexus, J. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 1597–1611. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N. A Study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. Lond. A 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Boashash, B.P. Estimating and interpreting the instantaneous frequency of a signal. Part I: Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Balyts’ Kyi, O.I.; Chmiel, J.; Krause, P.; Niekrasz, J.; Maciag, M. Role of hydrogen in the cavitation fracture of 45 steel in lubricating media. Mater. Sci. 2009, 45, 651. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1st Harmonic (Hz) | Fundamental (Hz) | 2nd Harmonic (Hz) | |
|---|---|---|---|
| 0.2c | 17.54 | 39.47 | 61.4 |
| 0.6c | 19.37 | 41.16 | 62.95 |
| 0.8c | 19.22 | 41.26 | 63.61 |
| c | 17.47 | 43.67 | 69.87 |
| Block Length | Frequency Discretization | Time Lapse between Blocks | Sampling Frequency (Hz) |
|---|---|---|---|
| 64 | 1024 | 8 | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rajaomazava, T.E., III; Benaouicha, M.; Astolfi, J.-A.; Boudraa, A.-O. Frequency and Amplitude Modulations of a Moving Structure in Unsteady Non-Homogeneous Density Fluid Flow. Fluids 2021, 6, 130. https://doi.org/10.3390/fluids6030130
Rajaomazava TE III, Benaouicha M, Astolfi J-A, Boudraa A-O. Frequency and Amplitude Modulations of a Moving Structure in Unsteady Non-Homogeneous Density Fluid Flow. Fluids. 2021; 6(3):130. https://doi.org/10.3390/fluids6030130
Chicago/Turabian StyleRajaomazava, Tolotra Emerry, III, Mustapha Benaouicha, Jacques-André Astolfi, and Abdel-Ouahab Boudraa. 2021. "Frequency and Amplitude Modulations of a Moving Structure in Unsteady Non-Homogeneous Density Fluid Flow" Fluids 6, no. 3: 130. https://doi.org/10.3390/fluids6030130
APA StyleRajaomazava, T. E., III, Benaouicha, M., Astolfi, J. -A., & Boudraa, A. -O. (2021). Frequency and Amplitude Modulations of a Moving Structure in Unsteady Non-Homogeneous Density Fluid Flow. Fluids, 6(3), 130. https://doi.org/10.3390/fluids6030130