
Fluidic-Oscillator-Based Pulsed Jet Actuators for Flow Separation Control

Abstract
:1. Introduction
2. Flow Physics of Active Separation Control with PJAs
2.1. PJA Working Principle
2.2. Main Design Parameters of PJA
2.3. Example of FO-PJAs Used in Practice
3. Experimental and Numerical Setup
3.1. Utilized Fluidic Oscillator Geometry
3.2. Experimental Methodology
3.3. CFD Methodology
4. Results
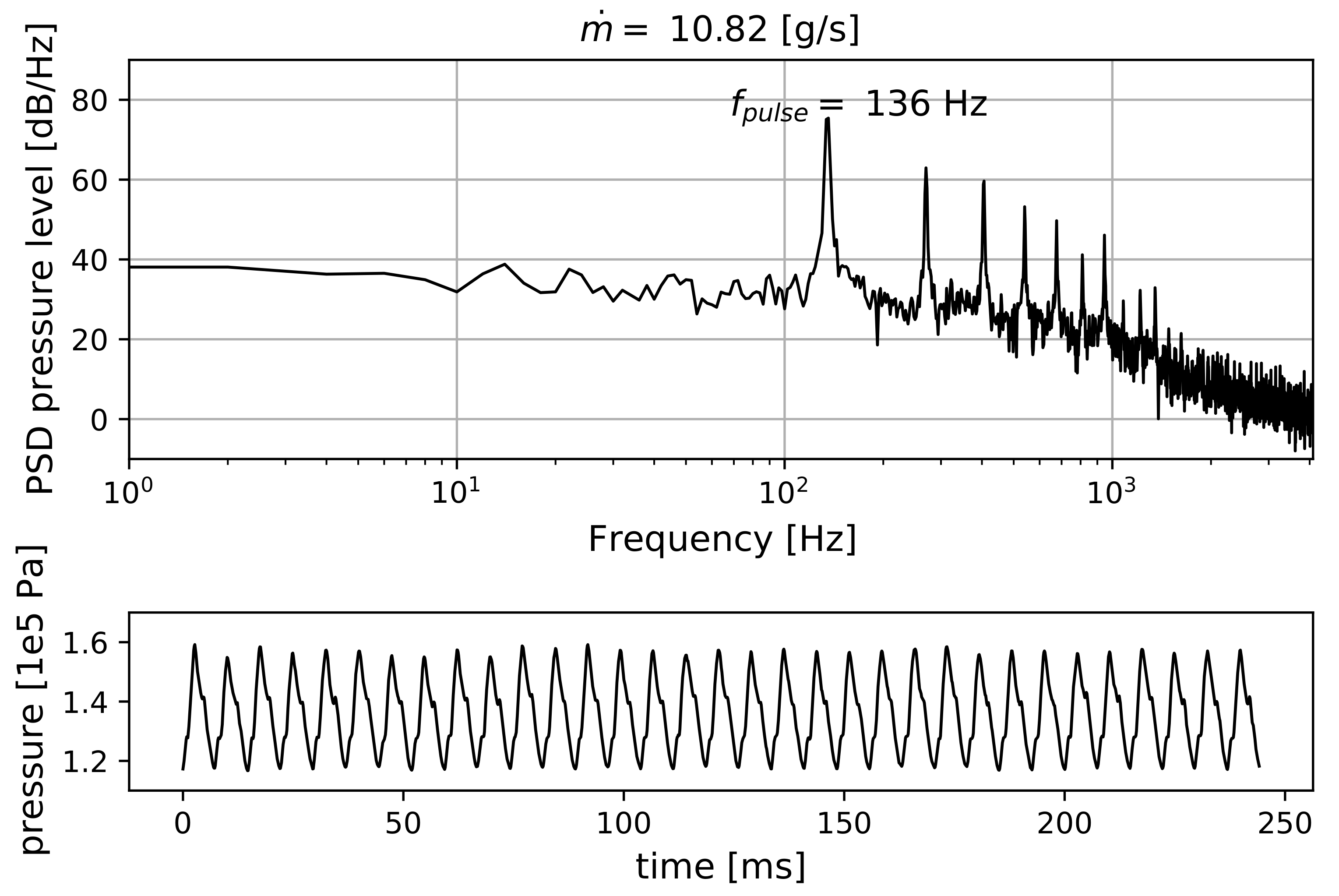
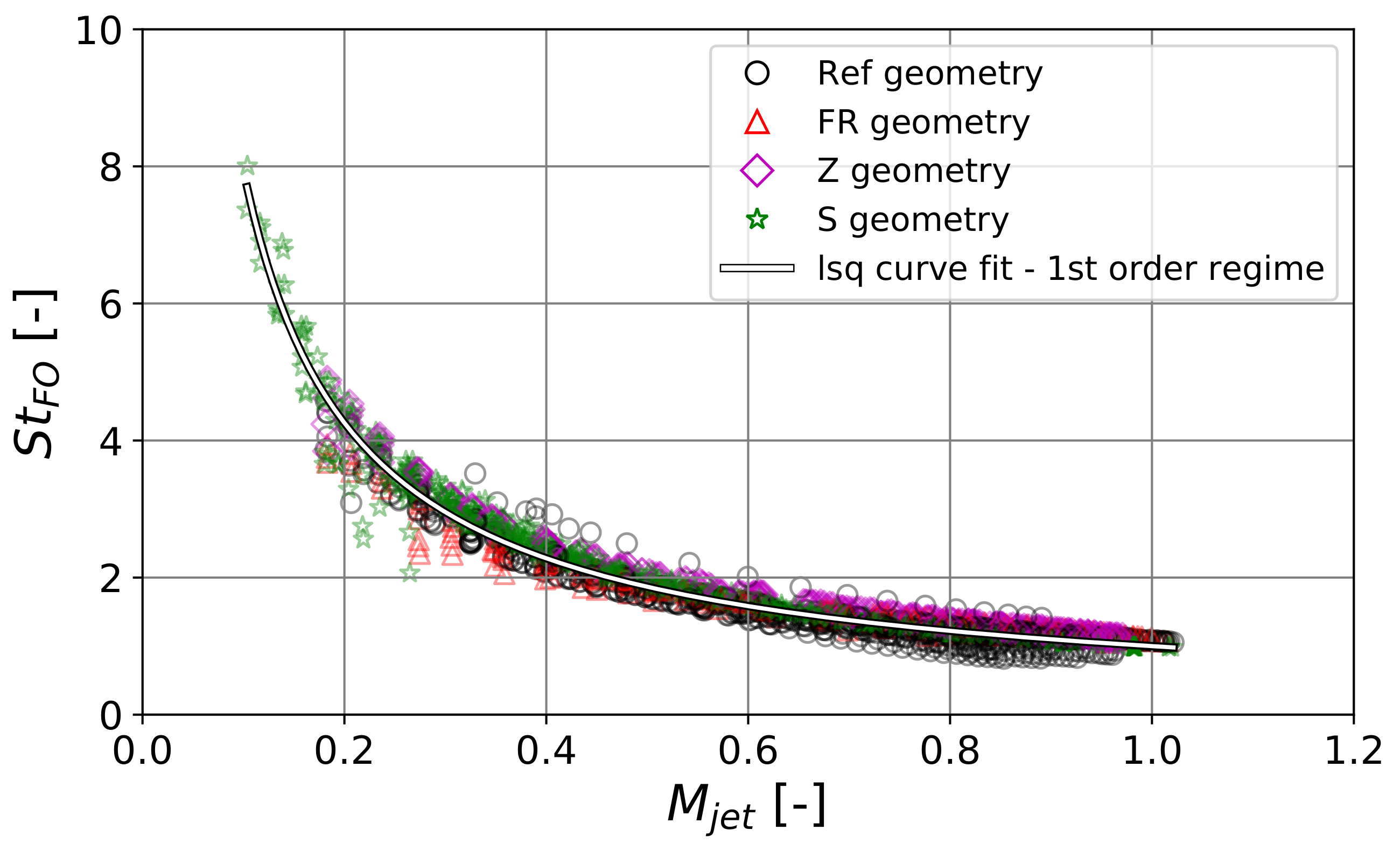
4.1. Fundamental Frequency Regime
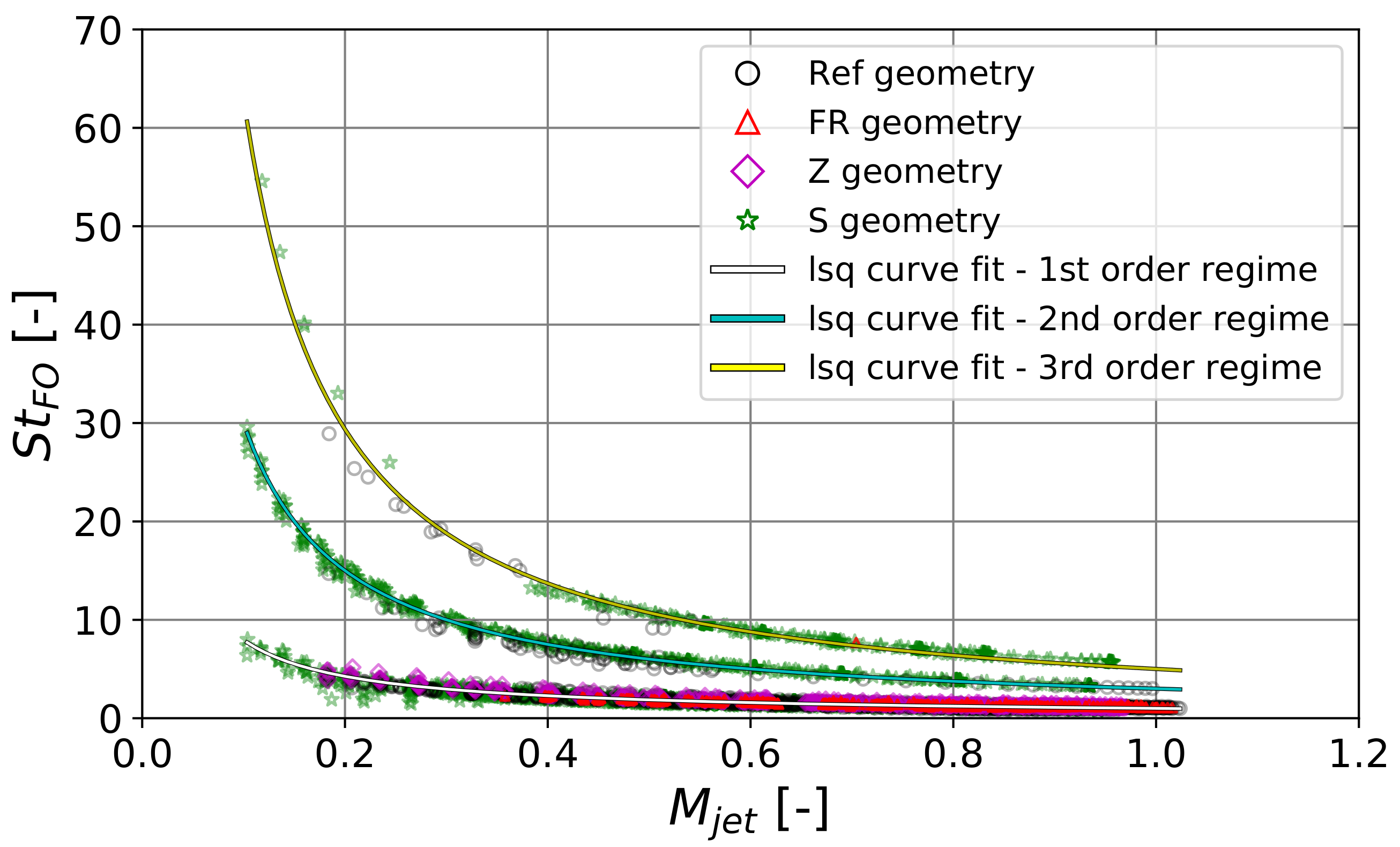
4.2. Higher-Order Regimes
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | two-dimensional |
| 3D | three-dimensional |
| AFC | active flow control |
| BMCM | company name, www.bmcm.de |
| CFD | computational fluid dynamics |
| FESTO | company name, www.festo.com |
| FO | fluidic oscillators |
| FO-PJA | fluidic oscillator based pulsed jet actuator |
| KULITE | company name, www.kulite.com |
| MDPI | Multidisciplinary Digital Publishing Institute |
| PJA | pulsed jet actuators / actuation |
| PSD | power spectral density |
| TU Berlin | Technische Universität Berlin |
| URANS | unsteady-Reynolds-averaged Navier–Stokes |
| VPCF | proportional flow control valve |
| VTP | vertical tail plane |
Nomenclature
| unblocked cross-section area of one outlet nozzle, m | |
| cross-section area of the power jet nozzle, m | |
| equivalent power jet diameter; , m | |
| non-dimensional feedback loop diameter; | |
| feedback loop diameter, m | |
| reduced frequency; | |
| excitation frequency, Hz | |
| switching frequency of the fluidic oscillator, Hz | |
| experimental measured switching frequency for CFD validation, Hz | |
| sampling frequency, Hz | |
| Full Scale, specified uncertainty percentage of the full scale range | |
| Full Scale Output–Best Fit Straight Line, specifies sensor accuracy/non-linearity | |
| feedback ratio, ratio between channel to outlet nozzle and the feedback loop inlet | |
| non-dimensional feedback loop length; | |
| feedback loop length, m | |
| distance between excitation location and trailing edge of the aerodynamic surface, m | |
| mass flow rate, kg/s | |
| jet Mach number; | |
| p | pressure, Pa |
| ideal gas constant, | |
| Strouhal number | |
| internal FO-PJA Strouhal number | |
| internal FO-PJA Strouhal number for the first-order regime | |
| internal FO-PJA Strouhal number for the second-order regime | |
| internal FO-PJA Strouhal number for the third-order regime | |
| throttling ratio; | |
| T | temperature; K |
| ambient temperature; K | |
| free-stream velocity, m/s | |
| non-dimensional feedback loop volume; | |
| outlet velocity, m/s | |
| non-dimensional wall distance | |
| difference between measured results | |
| isentropic exponent | |
| Mach number corrected jet density, kg/m | |
| confidence interval, of all values are within the specified range |
References
- Cattafesta, L.N.; Sheplak, M. Actuators for Active Flow Control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Gbadebo, S.A.; Cumpsty, N.A.; Hynes, T.P. Control of three-dimensional separations in axial compressors by tailored boundary layer suction. J. Turbomach. 2008, 130, 011004. [Google Scholar] [CrossRef]
- Radespiel, R.; Burnazzi, M.; Casper, M.; Scholz, P. Active flow control for high lift with steady blowing. Aeronaut. J. 2016, 120, 171–200. [Google Scholar] [CrossRef] [Green Version]
- Seifert, A.; Darabi, A.; Wygnanski, I. Delay of Airfoil Stall by Periodic Excitation. J. Aircr. 1996, 33, 691–698. [Google Scholar] [CrossRef]
- Darabi, A.; Wygnanski, I. Active management of naturally separated flow over a solid surface. Part 1. The forced reattachment process. J. Fluid Mech. 2004, 510, 105–129. [Google Scholar] [CrossRef]
- Greenblatt, D.; Wygnanski, I.J. The control of flow separation by periodic excitation. Prog. Aerosp. Sci. 2000, 36, 487–545. [Google Scholar] [CrossRef]
- Glezer, A.; Amitay, M. Synthetic Jets. Annu. Rev. Fluid Mech. 2002, 34, 503–529. [Google Scholar] [CrossRef]
- Woszidlo, R.; Ostermann, F.; Schmidt, H.J. Fundamental Properties of Fluidic Oscillators for Flow Control Applications. AIAA J. 2019, 57, 978–992. [Google Scholar] [CrossRef]
- Petz, R.; Nitsche, W. Active Separation Control on the Flap of a Two-Dimensional Generic High-Lift Configuration. J. Aircr. 2007, 44, 865–874. [Google Scholar] [CrossRef]
- Becker, R.; King, R.; Petz, R.; Nitsche, W. Adaptive Closed-Loop Separation Control on a High-Lift Configuration Using Extremum Seeking. AIAA J. 2007, 45, 1382–1392. [Google Scholar] [CrossRef]
- Grund, T.; Nitsche, W. Wind Tunnel and Flight Tests with Active Flow Control on a S10 Glider Configuration. In Notes on Numerical Fluid Mechanics and Multidisciplinary Design; Springer: Berlin/Heidelberg, Germany, 2013; pp. 117–124. [Google Scholar] [CrossRef]
- Spyropoulos, C.E. A Sonic Oscillator. In Proceedings of the Fluid Amplification Symposium; U.S. Army Materiel Command, Harry Diamont Laboratories: Washington, DC, USA, 1964; p. 27. [Google Scholar]
- Warren, R.W. Fluid Oscillator. U.S. Patent US3016066A, 22 January 1960. [Google Scholar]
- Warren, R.W. Negative Feedback Oscillator. U.S. Patent US3158166A, 7 August 1962. [Google Scholar]
- Cerretelli, C.; Kirtley, K. Boundary Layer Separation Control with Fluidic Oscillators. J. Turbomach. 2009, 131, 041001. [Google Scholar] [CrossRef]
- Gregory, J.; Tomac, M.N. A Review of Fluidic Oscillator Development and Application for Flow Control. In Proceedings of the 43rd Fluid Dynamics Conference, San Diego, CA, USA, 24–27 June 2013. [Google Scholar] [CrossRef]
- Seifert, A.; Bachar, T.; Wygnanski, I.; Koss, D.; Shepshelovich, M. Oscillatory blowing, a tool to delay boundary layer separation. In Proceedings of the 31st Aerospace Sciences Meeting, Reno, NV, USA, 11–14 January 1993; Volume 31. [Google Scholar] [CrossRef]
- Arwatz, G.; Fono, I.; Seifert, A. Suction and Oscillatory Blowing Actuator Modeling and Validation. AIAA J. 2008, 46, 1107–1117. [Google Scholar] [CrossRef]
- Tesař, V.; Hung, C.H.; Zimmerman, W.B. No-moving-part hybrid-synthetic jet actuator. Sensors Actuators A Phys. 2006, 125, 159–169. [Google Scholar] [CrossRef] [Green Version]
- Raghu, S. Fluidic oscillators for flow control. Exp. Fluids 2013, 54. [Google Scholar] [CrossRef]
- Tesař, V.; Zhong, S.; Rasheed, F. New Fluidic-Oscillator Concept for Flow-Separation Control. AIAA J. 2013, 51, 397–405. [Google Scholar] [CrossRef]
- Desai, P. A Fluidic Oscillator Based on a New Mechanism for Microbubble Generation and Developing Microbubble Stripping for Separation Phenomena. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2018. [Google Scholar]
- Zimmerman, W.; Desai, P. Fluidic Oscilators. WO Patent 2020208250, 11 April 2020. [Google Scholar]
- Bauer, M.; Lohse, J.; Haucke, F.; Nitsche, W. High-Lift Performance Investigation of a Two-Element Configuration with a Two-Stage Actuator System. AIAA J. 2014, 52, 1307–1313. [Google Scholar] [CrossRef]
- Bauer, M.; Grund, T.; Nitsche, W. Experiments on Active Drag Reduction on a Complex Outer Wing Model. AIAA J. 2015, 53, 1774–1783. [Google Scholar] [CrossRef]
- Schlösser, P.; Bauer, M. Design of a pulsed jet actuator for separation control. CEAS Aeronaut. J. 2020, 11, 805–812. [Google Scholar] [CrossRef]
- Schloesser, P.; Soudakov, V.; Bauer, M.; Wild, J. Active Separation Control at the Pylon-Wing Junction of a Real-Scale Model. AIAA J. 2019, 57, 132–141. [Google Scholar] [CrossRef] [Green Version]
- Löffler, S.; Staats, M.; Grund, T.; Weiss, J. Increasing the Effectiveness of a Vertical Stabilizer by Combining Pulsed Jet Actuation at the Leading Edge and the Rudder Hinge Line. In Proceedings of the AIAA Aviation 2018 Forum, Atlanta, GA, USA, 25–29 June 2018. AIAA Paper 2018-2854. [Google Scholar]
- Löffler, S.; Rohlfs, L.; Staats, M.; Weiss, J. Flow Field Investigation on a Vertical Stabilizer with Pulsed Jet Actuation by means of PIV Measurements. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Rohlfs, L.; Löffler, S.; Weiss, J. Investigating the Effect of Pulsed Jet Actuation at the Rudder Hinge Line of a Vertical Stabilizer with Phase-Locked PIV. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Bauer, M. Design and Application of a Fluidic Actuator System for High Lift Flow Control. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2015. [Google Scholar]
- Löffler, S.; Weiss, J. Benefits of Applying Pulsed Jet Actuation on a Vertical Stabilizer. In Fundamentals of High Lift for Future Civil Aircraft: Contributions to the Final Symposium of the Collaborative Research Center 880, December 17–18, 2019, Braunschweig, Germany; Radespiel, R., Semaan, R., Eds.; Springer International Publishing: Cham, Switherland, 2021; pp. 123–133. [Google Scholar] [CrossRef]
- Staats, M.; Löffler, S.; Ebert, C.; Grund, T.; Weiss, J. A Fluidic Device for Active Flow Control: Simulation vs. Experiment with Emphasis on Application. In Proceedings of the AIAA Aviation Forum, Atlanta, GA, USA, 25–29 June 2018. AIAA Paper 2018-3336. [Google Scholar]
- Hecklau, M.; Salazar, D.P.; Nitsche, W. Influence of the Actuator Jet Angle on the Reattachment Process with Pulsed Excitation. In New Results in Numerical and Experimental Fluid Mechanics VIII; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 18; pp. 143–150. [Google Scholar]
- Mohammed-Taifour, A.; Weiss, J. Periodic forcing of a large turbulent separation bubble. J. Fluid Mech. 2021, 915, A24. [Google Scholar] [CrossRef]
- Steinfurth, B.; Weiss, J. Vortex rings produced by non-parallel planar starting jets. J. Fluid Mech. 2020, 903, A16. [Google Scholar] [CrossRef]
- Shariff, K.; Leonard, A. Vortex Rings. Annu. Rev. Fluid Mech. 1992, 24, 235–279. [Google Scholar] [CrossRef]
- Sau, R.; Mahesh, K. Optimization of pulsed jets in crossflow. J. Fluid Mech. 2010, 653, 365–390. [Google Scholar] [CrossRef] [Green Version]
- Kroll, H. Experimentelle Untersuchung von Ringwirbeln und Deren Interaktion mit Einer Ebenen Prallplatte bei überlagerter Querströmung. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2016. [Google Scholar]
- Turner, J.S. Buoyancy Effects in Fluids. In Cambridge Monographs on Mechanics; Cambridge University Press: Cambridge, UK, 1973. [Google Scholar] [CrossRef]
- Kirshner, J.M.; Katz, S. Chapter 10—The Bistable Switch. In Design Theory of Fluidic Components; Kirshner, J.M., Katz, S., Eds.; Academic Press: Cambridge, MA, USA, 1975; pp. 382–424. [Google Scholar] [CrossRef]
- Tesař, V. Taxonomic trees of fluidic oscillators. EPJ Web of Conferences. EDP Sci. 2017, 143, 02128. [Google Scholar]
- Cerretelli, C.; Gharaibah, E. An Experimental and Numerical Investigation on Fluidic Oscillators For Flow Control. In Proceedings of the 37th AIAA Fluid Dynamics Conference and Exhibit, Miami, FL, USA, 25–28 June 2007. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | FR | Z | S | |
|---|---|---|---|---|
| power jet nozzle cross-section area [] | ||||
| max. settling chamber cross-section area [] | 53.67 | 53.67 | 96.27 | 23.85 |
| feedback ratio [-] | 50/50 | 80/20 | 50/50 | 50/50 |
| outlet nozzle cross-section area [] |
| Inlet | Outlet | Walls | |
|---|---|---|---|
| U | flowRateInletVelocity | zeroGradient | fixedValue |
| massFlowRate constant | value uniform | ||
| 0.002 [kg/s] | [m/s] | ||
| p | zeroGradient | fixedValue | zeroGradient |
| value uniform 101325 [Pa] | |||
| T | fixedValue | zeroGradient | zeroGradient |
| value uniform 293 [K] | |||
| fixedValue | zeroGradient | nutLowReWallFunction | |
| value uniform 0.0011 [m/s] |
| Schemes/Methods | Specification |
|---|---|
| ddtSchemes | Euler |
| gradSchemes | Gauss linear |
| divSchemes | Gauss lienear |
| Gauss limitedLinear 1 | |
| laplacianSchemes | Gauss linear corrected |
| interpolationSchemes | linear |
| snGradSchemes | corrected |
| wallDist | meshWave |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Löffler, S.; Ebert, C.; Weiss, J. Fluidic-Oscillator-Based Pulsed Jet Actuators for Flow Separation Control. Fluids 2021, 6, 166. https://doi.org/10.3390/fluids6040166
Löffler S, Ebert C, Weiss J. Fluidic-Oscillator-Based Pulsed Jet Actuators for Flow Separation Control. Fluids. 2021; 6(4):166. https://doi.org/10.3390/fluids6040166
Chicago/Turabian StyleLöffler, Stephan, Carola Ebert, and Julien Weiss. 2021. "Fluidic-Oscillator-Based Pulsed Jet Actuators for Flow Separation Control" Fluids 6, no. 4: 166. https://doi.org/10.3390/fluids6040166
APA StyleLöffler, S., Ebert, C., & Weiss, J. (2021). Fluidic-Oscillator-Based Pulsed Jet Actuators for Flow Separation Control. Fluids, 6(4), 166. https://doi.org/10.3390/fluids6040166