
A Mathematical Model for a Conceptual Design and Analyses of UAV Stabilization Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Mathematical models in the time domain: These models are based on the vector–matrix form of representation of systems of differential equations and systems of finite-difference equations, the wide use of concepts, and methods of the state-space theory.
- Mathematical models based on the use of the Laplace transform and -transform [13].
2. Methods
2.1. Classes of Mathematical Models of Continuous–Discrete Systems
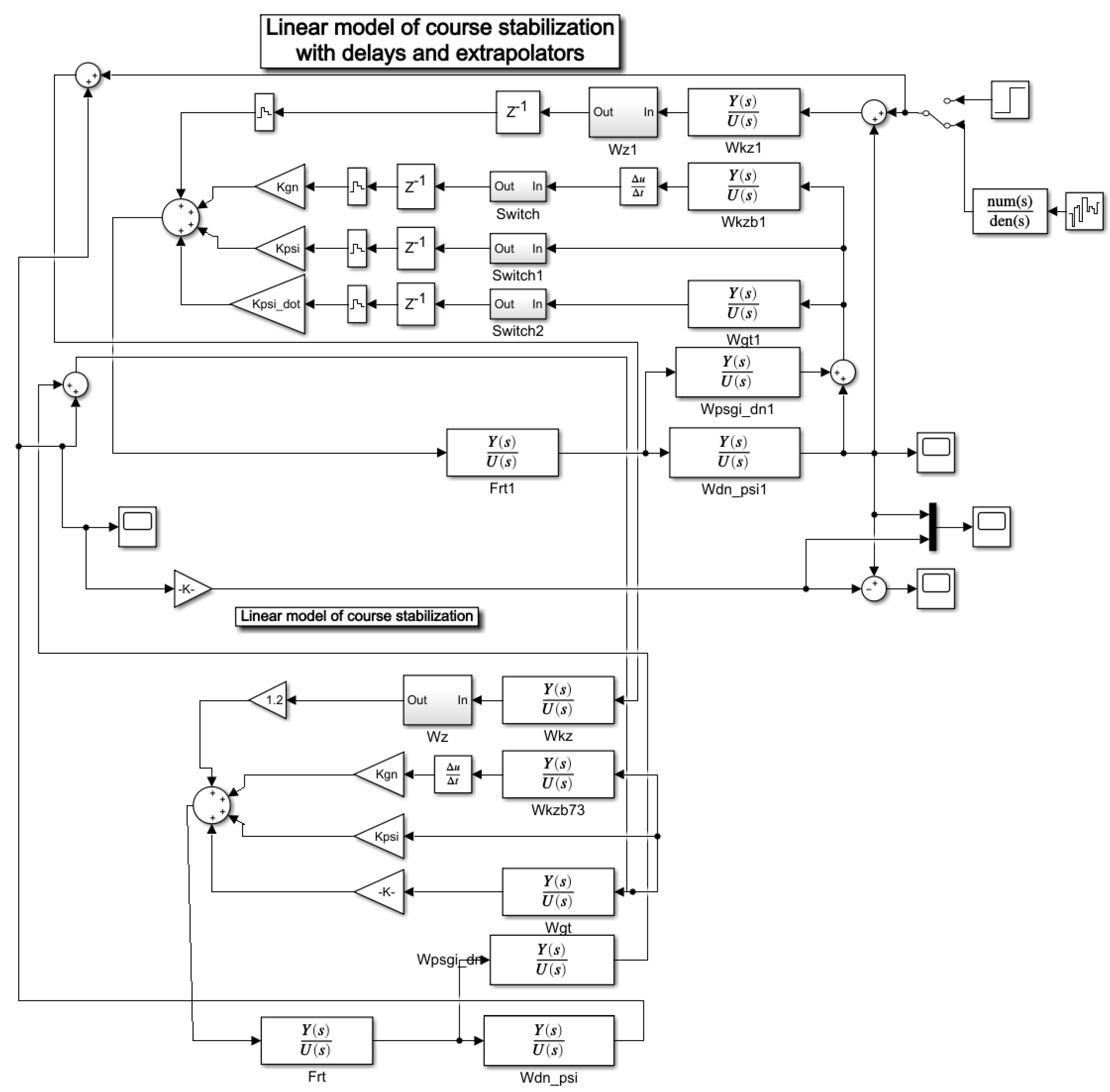
2.2. Full Continuous–Discrete Multi-Rate Model of the UAV Stabilization System
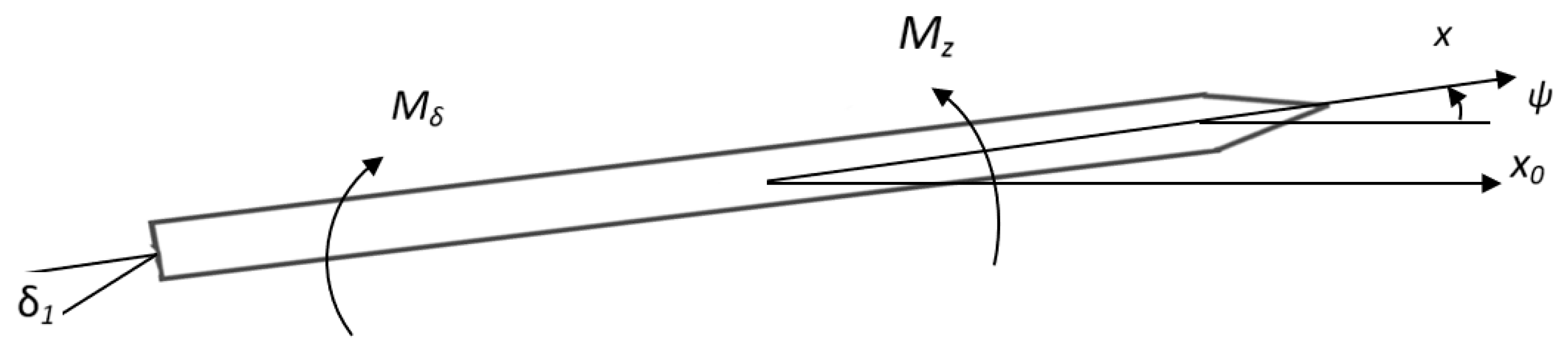
2.3. Influence of Deformations of the UAV Body on Its Dynamics
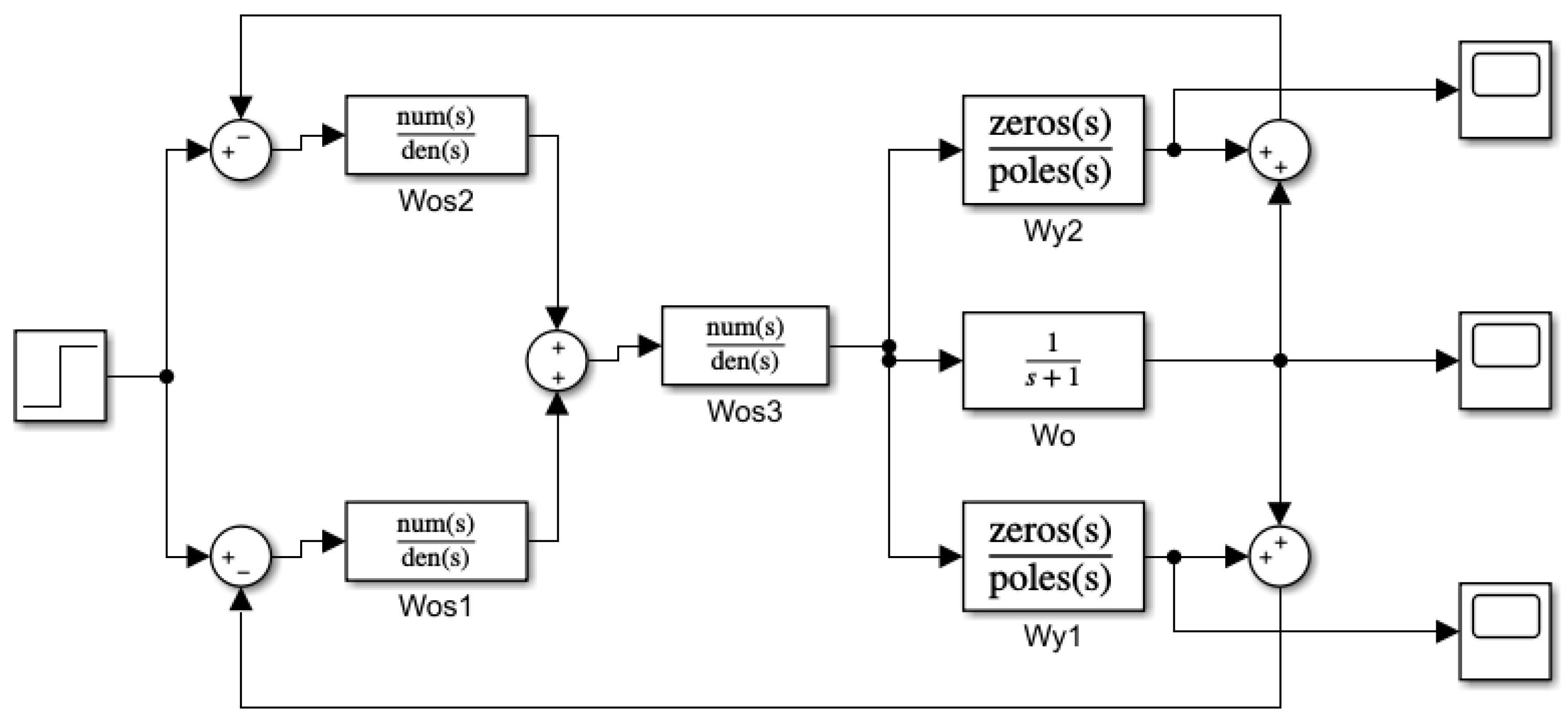
2.4. Hierarchical Models of the UAV Stabilization System
3. Results
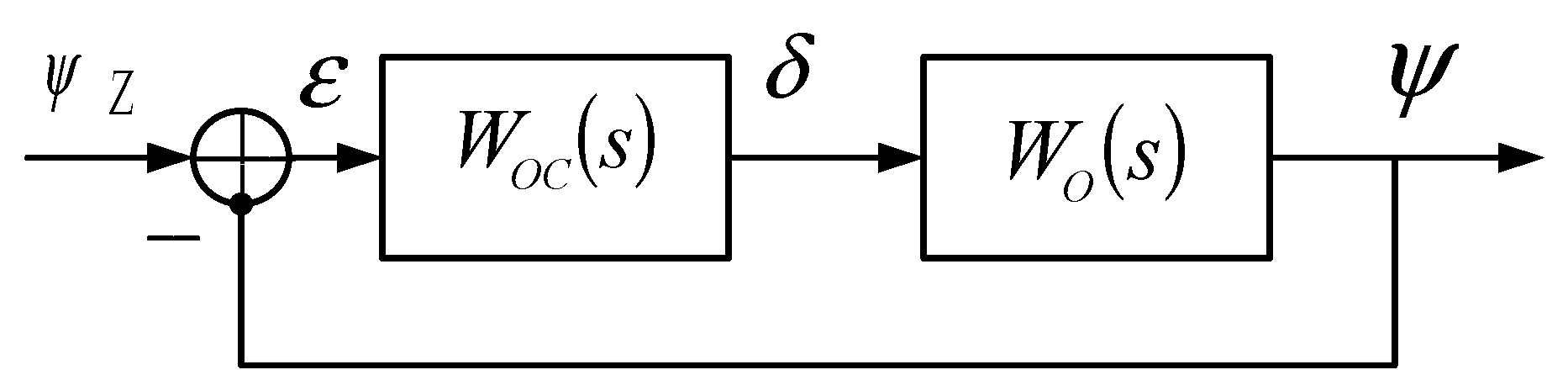
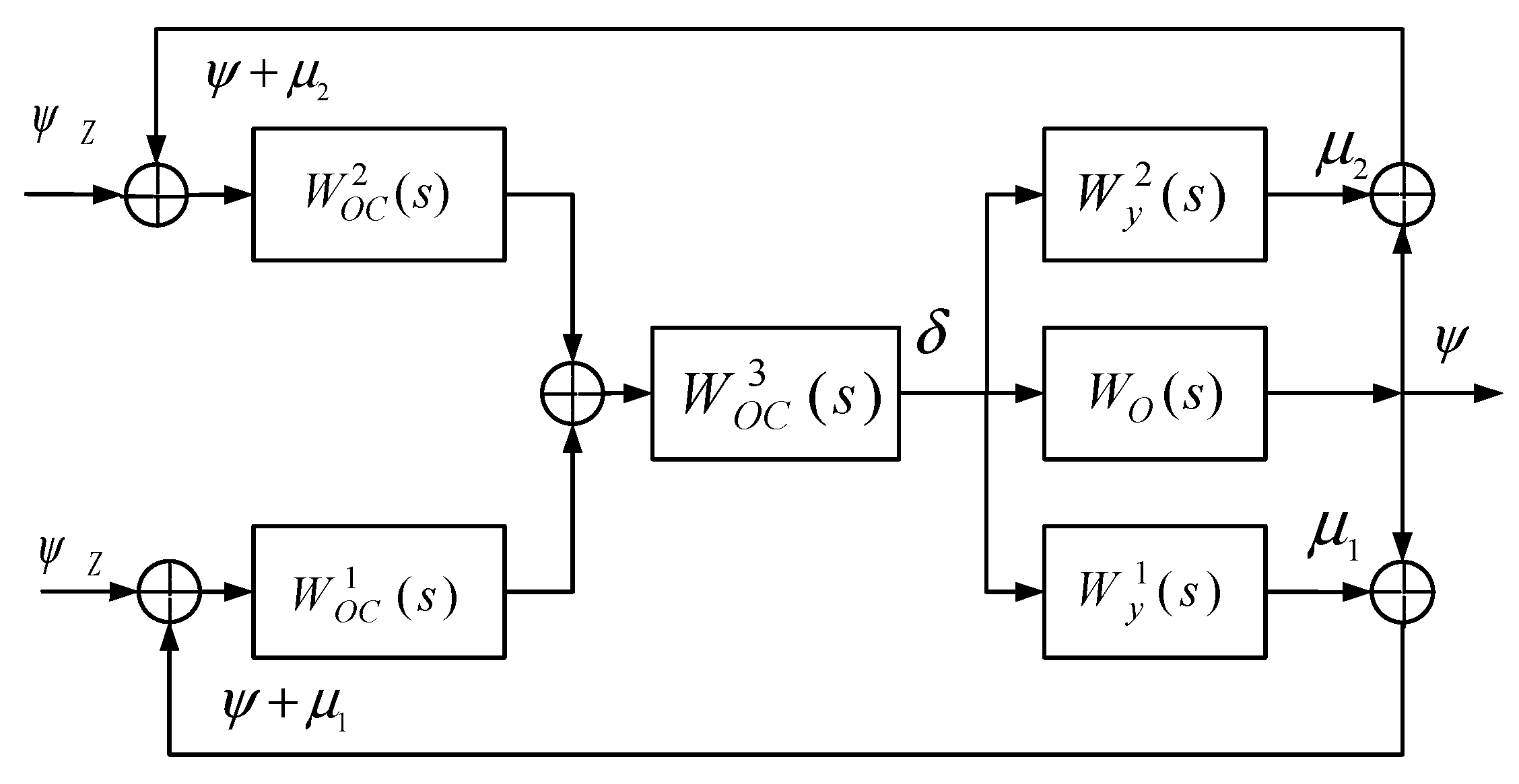
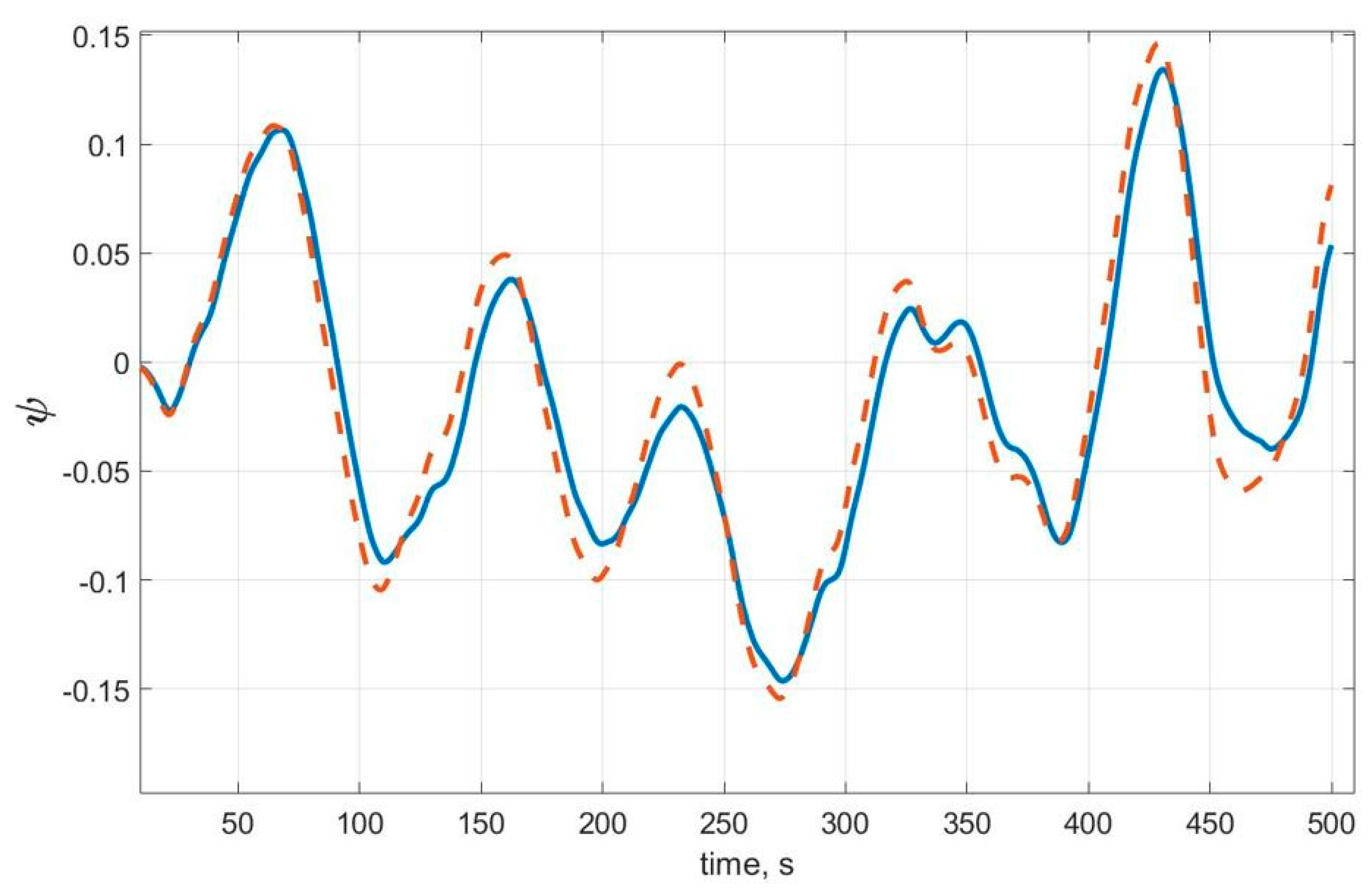
3.1. Analysis of the Multi-Rate Multiloop UAV Lateral Stabilization System
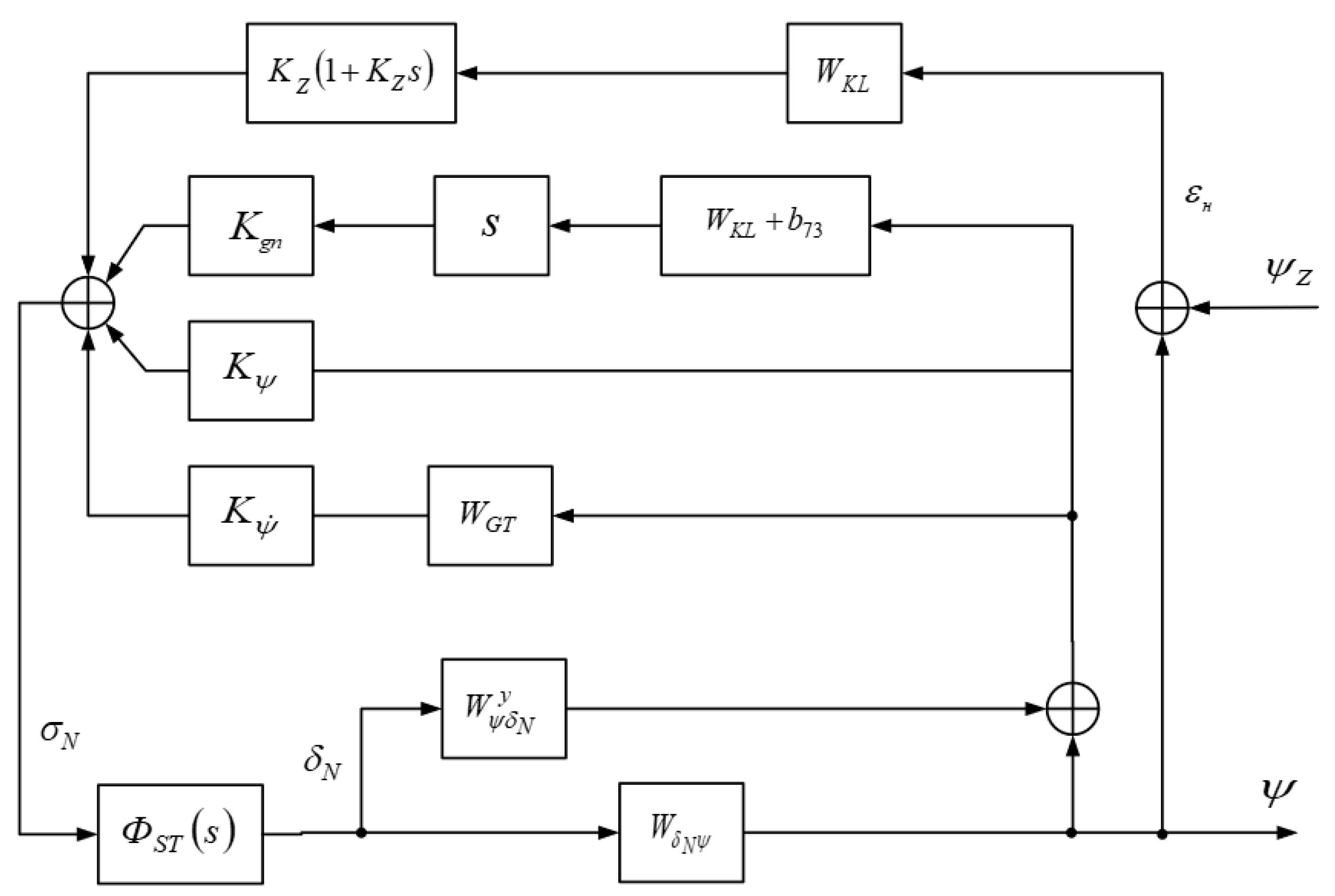
3.2. Analysis of the Elastic UAV Lateral Stabilization System
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control—Analysis and Design; Wiley: Hoboken, NJ, USA, 2008; 590p. [Google Scholar]
- Nelson, R.C.; Smith, S.E. Flight Stability and Automatic Control, 2nd ed.; McGraw-Hill: New York, NY, USA, 1989; 452p. [Google Scholar]
- Sushchenko, O.; Goncharenko, A. Design of Robust Systems for Stabilization of Unmanned Aerial Vehicle Equipment. Int. J. Aerosp. Eng. 2016, 2016, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Yi-Qing, L.I. Multi-mobile-robot control system based on wireless distribution system. Mach. Des. Manuf. 2009, 10, 192–194. [Google Scholar]
- Fahlstrom, P.G.; Gleason, T.J. Introduction to UAV Systems, 4th ed.; John Wiley: Hoboken, NJ, USA, 2012; 287p. [Google Scholar]
- Lopez-Briones, Y.F.; Sanchez-Rivera, L.M.; Arias-Montano, A. Aerodynamic Analysis for the Mathematical Model of a Dual-System UAV. In Proceedings of the 2020 17th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 11–13 November 2020; pp. 1–6. [Google Scholar]
- Jiong, Y.; Lei, Z.; Jiangping, D.; Rong, S.; Jianyu, W. GPS/SINS/BARO Integrated Navigation System for UAV. Int. Forum Inf. Technol. Appl. 2010, 3, 19–25. [Google Scholar] [CrossRef]
- Lin, P.N.W.; Nang, L.K.; Hla, M.T. Longitudinal and Lateral Dynamic System Modeling of a Fixed-Wing UAV. Int. J. Sci. Technol. Res. 2017, 6, 171–174. [Google Scholar]
- Tao, Z.; Lei, W. SINS and GPS Integrated Navigation System of a Small Unmanned Aerial Vehicle. In Proceedings of the International Seminar on Future BioMedical Information Engineering, Wuhan, China, 18 December 2008; pp. 465–468. [Google Scholar] [CrossRef]
- Belanger, J.; Desbiens, A.; Gagnon, É. UAV Guidance with Control of Arrival Time. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 4488–4493. [Google Scholar]
- Reichert, R. Dynamic scheduling of modern-robust-control autopilot designs for missiles. IEEE Control. Syst. 1992, 12, 35–42. [Google Scholar] [CrossRef]
- Wang, K.; Gong, Z.; Hou, Y.; Zhang, M.; Liu, C.; Chen, R. Model Based Design and Procedure of Flight Control System for Unmanned Aerial Vehicle. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 763–768. [Google Scholar]
- Coffey, T.C.; Williams, I.J. Analysis of Multiloop, Multirate, Sampled Systems. AIAA J. 1966, 4, 2178–2190. [Google Scholar] [CrossRef]
- Ju, C.; Son, H.I. A Hybrid Systems-based Hierarchical Control Architecture for Heterogeneous Field Robot Teams (arxiv.org). Available online: https://arxiv.org/abs/2002.08602 (accessed on 17 February 2021).
- Kiyashchenko, L.A. The problem of estimation in continuous/discrete dynamic systems. J. Math. Sci. 1996, 82, 3311–3315. [Google Scholar] [CrossRef]
- Agranovich, G.A. Models of the State of Multiple-Timing Continuous-Discrete Systems. J. Math. Sci. 2001, 103, 27–30. [Google Scholar] [CrossRef]
- Barabanov, A.T.; Agranovich, G.A. Linear models and optimization of continuous-discrete dynamical systems. Dyn. Syst. 1983, 2, 17–24. [Google Scholar]
- Lennarston, B. Multirate sampled-data control of two-time-scale systems. IEEE Trans. Autom. Control. 1989, 34, 642–644. [Google Scholar] [CrossRef]
- Patel, Y. The Design and Analysis of Multirate Control Systems. Ph.D. Thesis, University of York, New York, NY, USA, 1991. [Google Scholar]
- Lindgärde, O.; Lennartson, B. Performance and robust frequency response for multirate sampled-data systems. In Proceedings of the 1997 American Control Conference (Cat. No.97CH36041), Albuquerque, NM, USA, 6 June 1997; pp. 3877–3881. [Google Scholar]
- Kranc, G.M. Multirate Sampled Systems; TR T-14/B; Electronics Research Lab, Department of Electrical Engineering, Columbia University: New York, NY, USA, 1956. [Google Scholar]
- Kuo, B. Analysis and Synthesis of Sampled—Data Control Systems; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1963; Chapter 10. [Google Scholar]
- Kramar, V. Construction of equivalent matrix model of multivaruable multi-stage control system. In Proceedings of the 2016 2nd International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk, Russia, 19–20 May 2016; pp. 1–4. [Google Scholar]
- Kramar, V. Equivalent One-Time Model with Structural Invariant of Quantum Circuits of Multivariable Multi-Stage Control System. In Proceedings of the 2018 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Moscow, Russia, 15–18 May 2018; pp. 1–5. [Google Scholar]
- Kramar, V.; Alchakov, V.; Kabanov, A.; Dudnikov, S.; Dmitriev, A. The Design of Optimal Lateral Motion Control of an UAV Using the Linear-Quadratic Optimization Method in the Complex Domain. Int. Rev. Aerosp. Eng. 2020, 13, 217. [Google Scholar] [CrossRef]
- Brodsky, S.; Nebylov, A.; Panferov, A. Simulation and Control of Flexible Vehicles. Proc. IFAC Vol. 2007, 40, 371–376. [Google Scholar] [CrossRef]
- Kramar, V.; Volodin, A.; Panasenko, V.; Khoroshev, V. Mathematical model of the elongated body vibrations to describe the elastic properties of the aerial vehicle. IOP Conf. Series: Mater. Sci. Eng. 2020, 709, 022070. [Google Scholar] [CrossRef] [Green Version]
- Timoshenko, S.; Goodier, J. Theory of Elasticity; McGraw-Hill: New York, NY, USA, 1970; 506p. [Google Scholar]
- Aleksandrov, E.E. Automatic Control of Moving Objects and Technological Processes; KhPI: Kharkiv, Ukraine, 2006; 528p. [Google Scholar]
- Nechaev, Y. Neural Fuzzy Decision Support System for Assessing the Behavior of a Complex Dynamic Object; State Marine Technical University: Saint Petersburg, Russia, 2008; 68p. [Google Scholar]
- Lebedev, A. Statistical Dynamics and Optimization of Aircraft Control; Mashinostroenie: Moscow, Russia, 1985; 279p. [Google Scholar]
- Kramar, V.; Dushko, V.R.; Kabanov, A.; Falaleev, A.P. Flight Control System Synthesis for High-Speed Unmanned Vehicle, Considering its Elastic Properties. J. Physics: Conf. Ser. 2017, 803, 12080. [Google Scholar] [CrossRef] [Green Version]
- Goorden, M.; Dingemans, C.; Reniers, M.; Van De Mortel-Fronczak, J.; Fokkink, W.; Rooda, J. Supervisory Control of Multilevel Discrete-Event Systems with a Bus Structure. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3204–3211. [Google Scholar]
- Zhang, G.; Huo, X.; Liu, J.; Ma, K. Adaptive Control with Quantized Inputs Processed by Lipschitz Logarithmic Quantizer. Int. J. Control. Autom. Syst. 2021, 19, 921–930. [Google Scholar] [CrossRef]
- Ju, C.; Son, H.I. Hybrid Systems based Modeling and Control of Heterogeneous Agricultural Robots for Field Operations. In Proceedings of the ASABE Annual International Meeting 2019, Boston, MA, USA, 7–10 July 2019; pp. 1–5. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kramar, V.; Kabanov, A.; Dudnikov, S. A Mathematical Model for a Conceptual Design and Analyses of UAV Stabilization Systems. Fluids 2021, 6, 172. https://doi.org/10.3390/fluids6050172
Kramar V, Kabanov A, Dudnikov S. A Mathematical Model for a Conceptual Design and Analyses of UAV Stabilization Systems. Fluids. 2021; 6(5):172. https://doi.org/10.3390/fluids6050172
Chicago/Turabian StyleKramar, Vadim, Aleksey Kabanov, and Sergey Dudnikov. 2021. "A Mathematical Model for a Conceptual Design and Analyses of UAV Stabilization Systems" Fluids 6, no. 5: 172. https://doi.org/10.3390/fluids6050172
APA StyleKramar, V., Kabanov, A., & Dudnikov, S. (2021). A Mathematical Model for a Conceptual Design and Analyses of UAV Stabilization Systems. Fluids, 6(5), 172. https://doi.org/10.3390/fluids6050172