
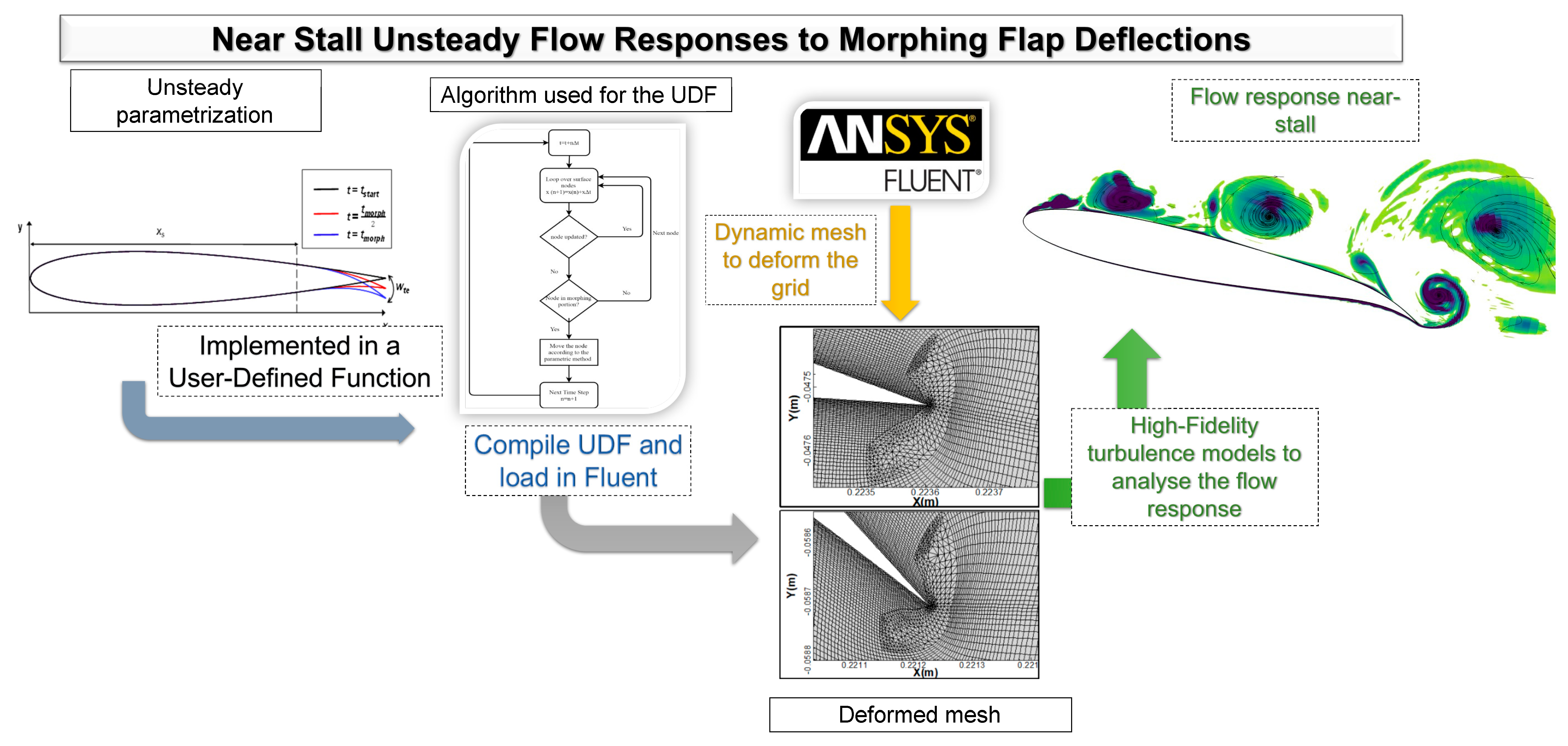
Near Stall Unsteady Flow Responses to Morphing Flap Deflections




Abstract
:
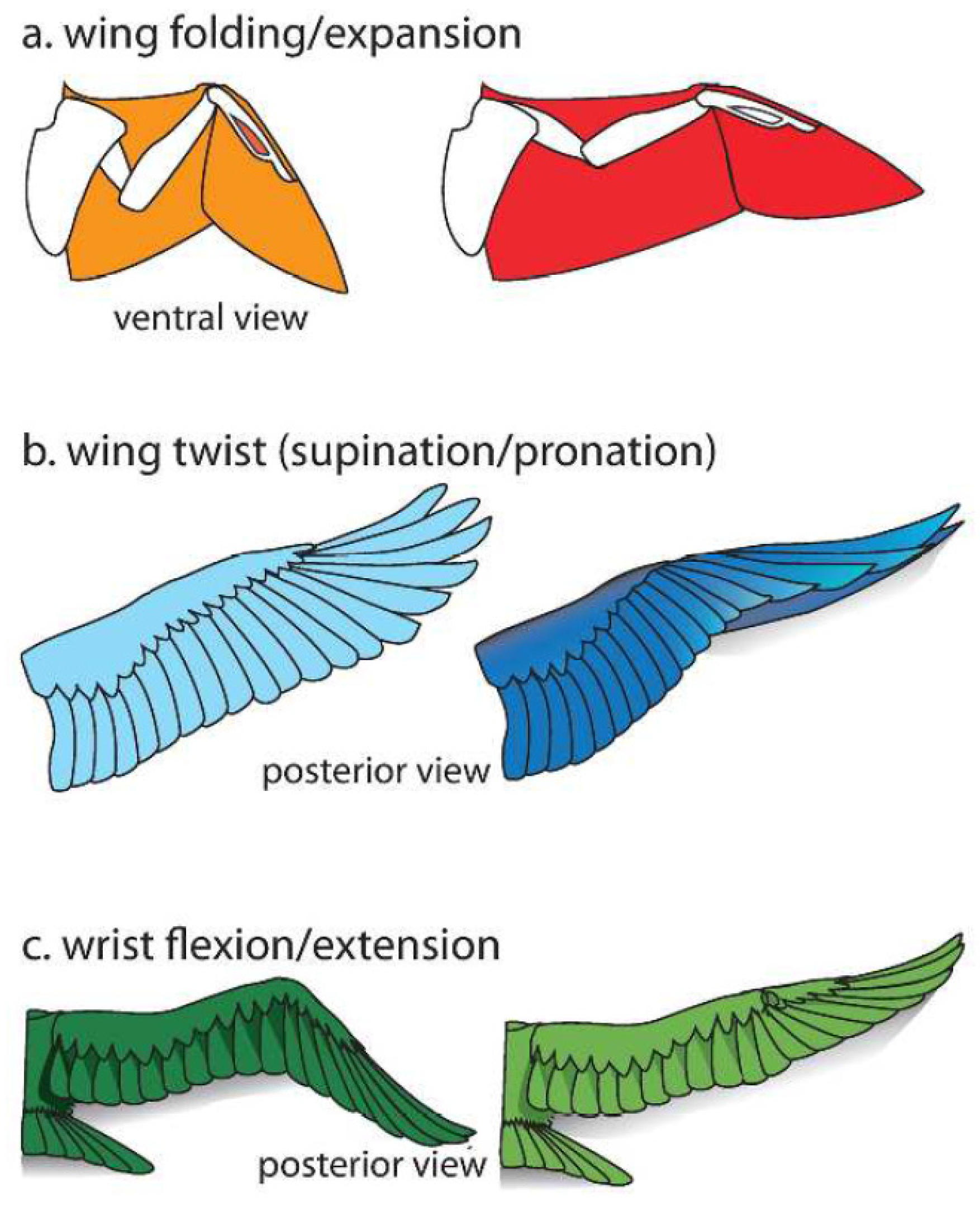
1. Introduction
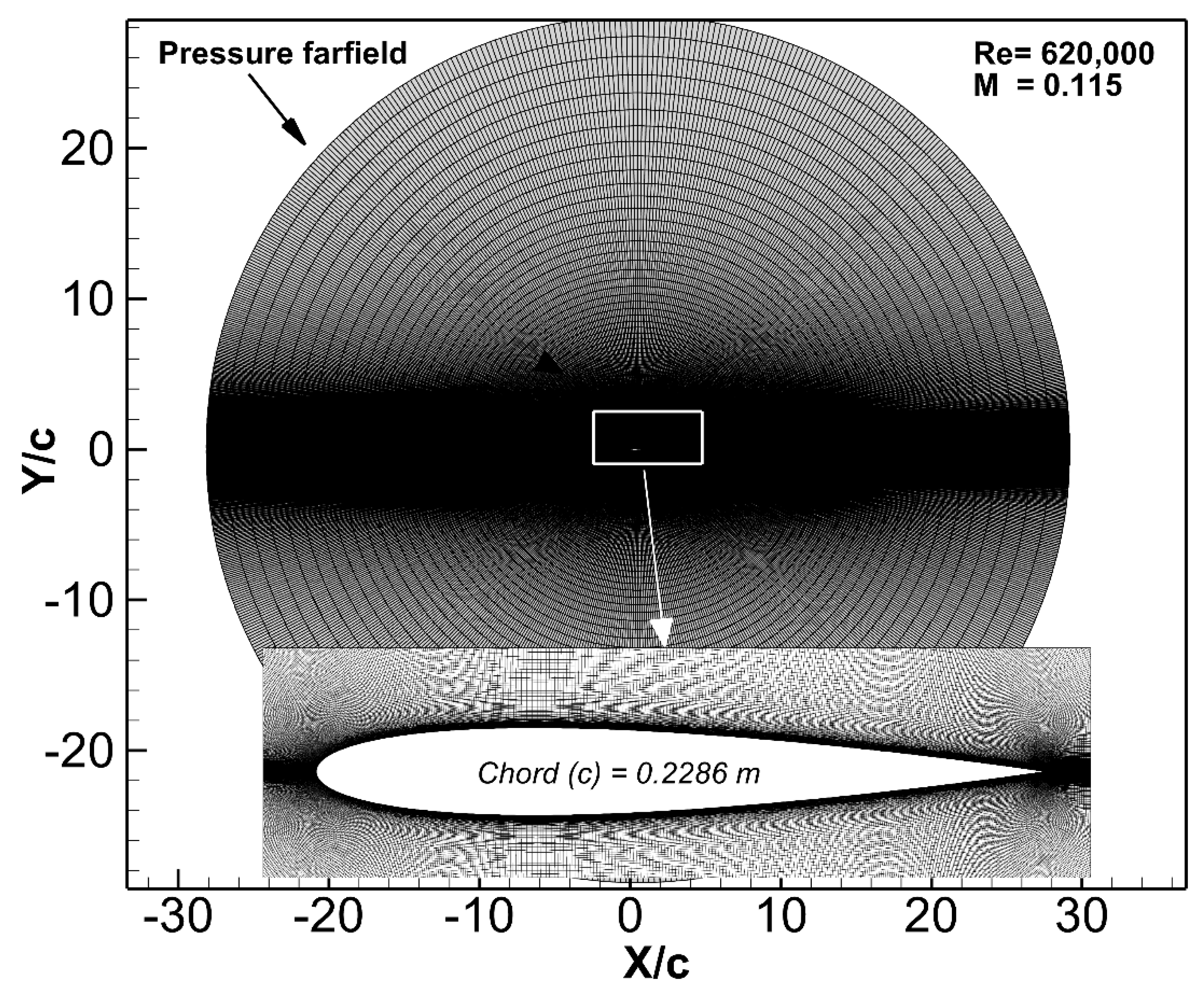
2. Problem Definition
3. Governing Equations
3.1. Fluid Dynamics
Turbulence Modeling
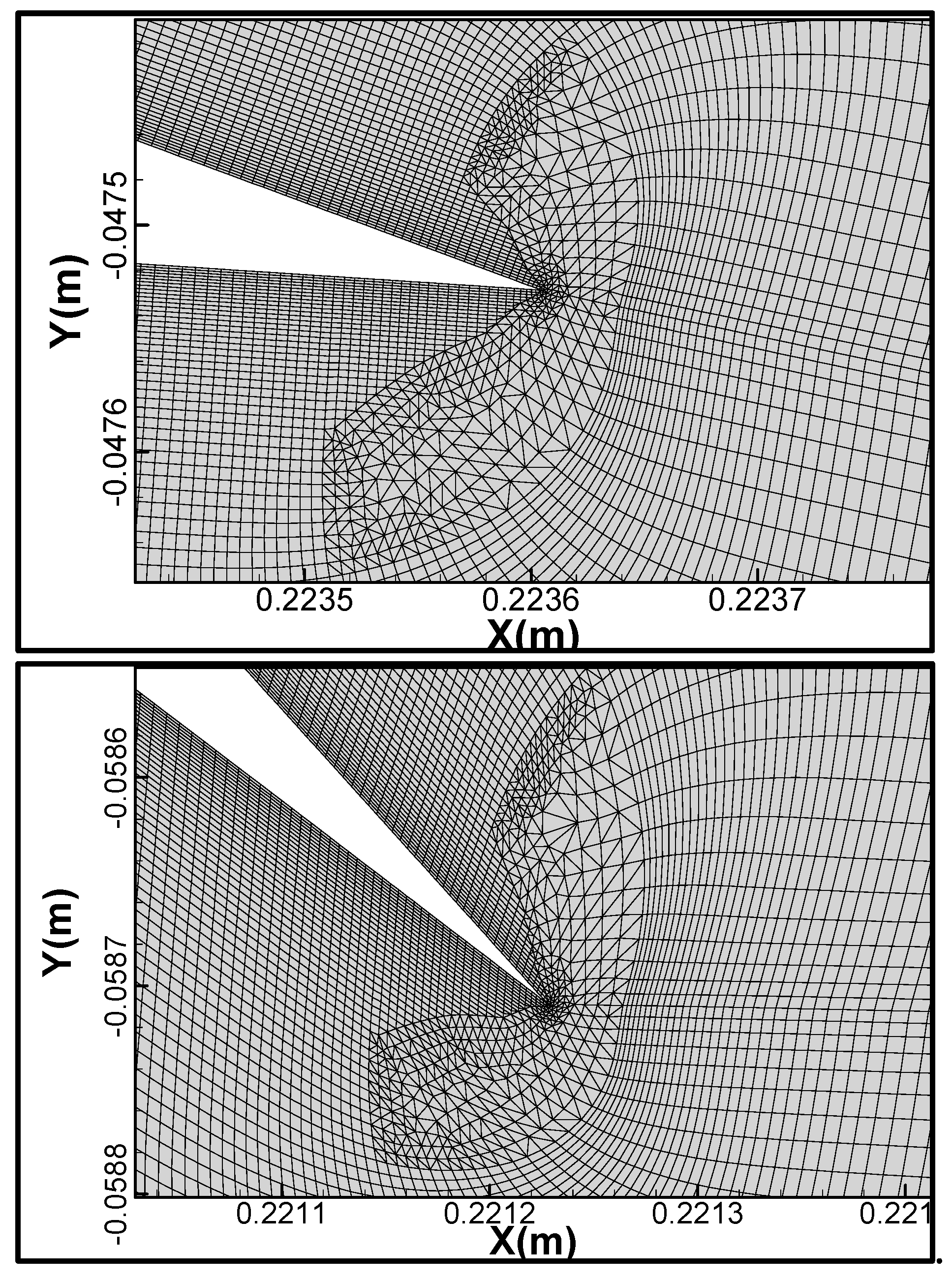
3.2. Dynamic Mesh Update Methods
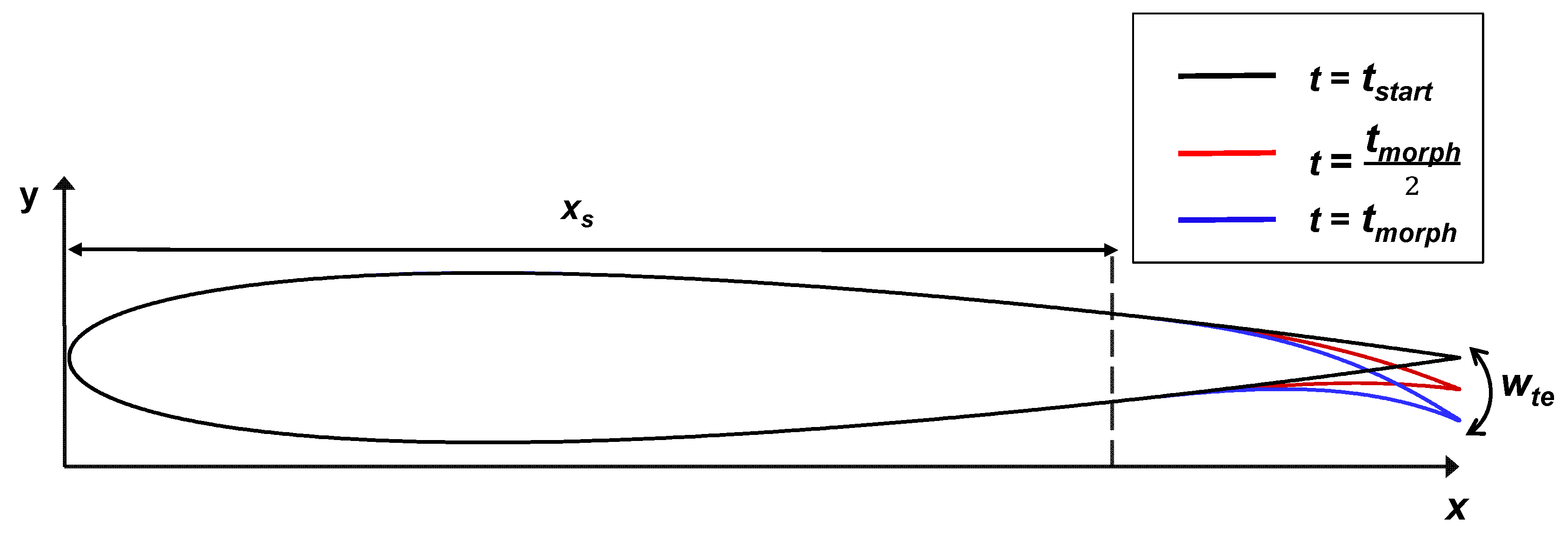
4. Mathematical Model of the Trailing-Edge Motion
5. Computational Setup
6. Results and Discussion
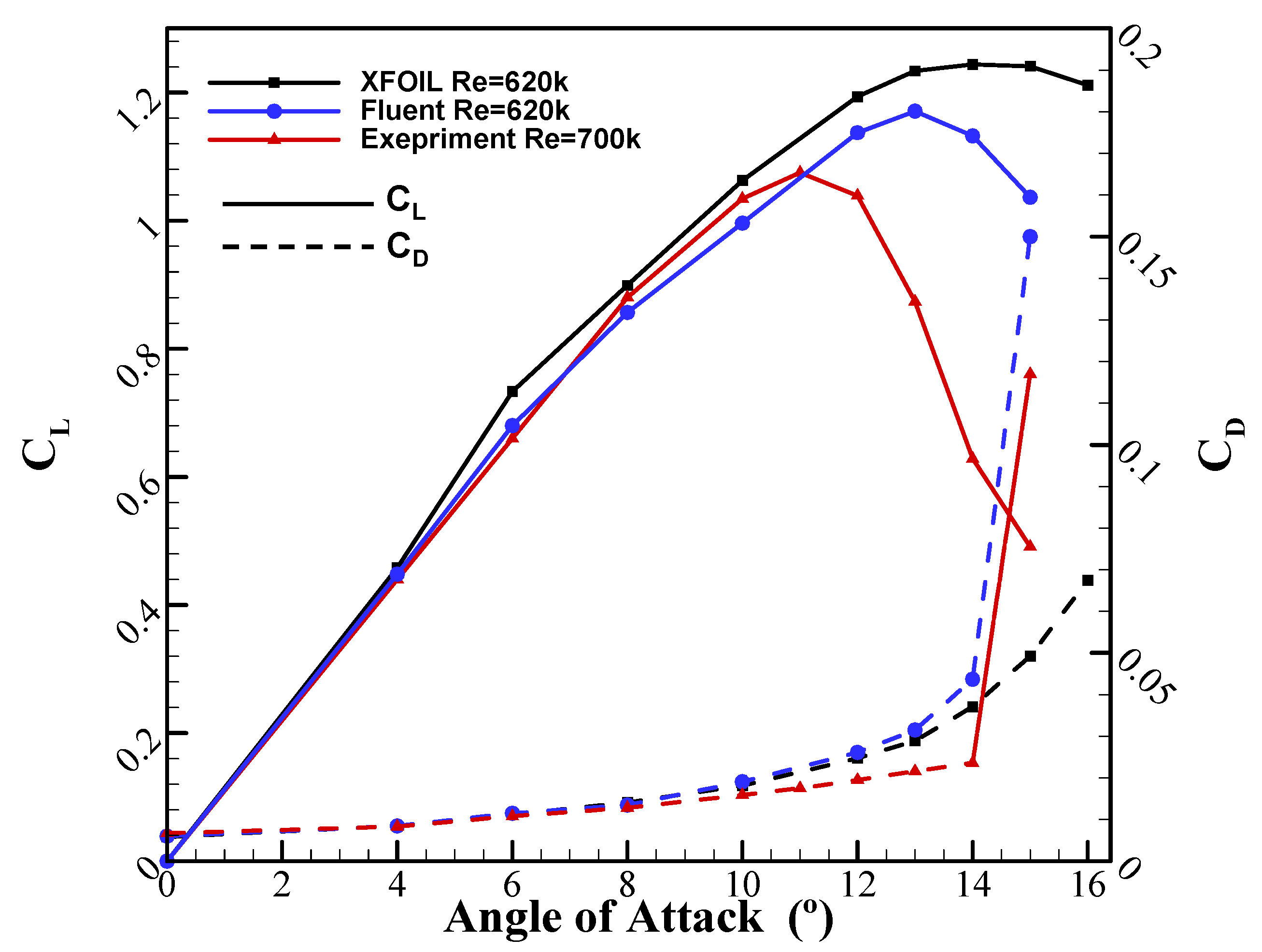
6.1. Verification and Validation
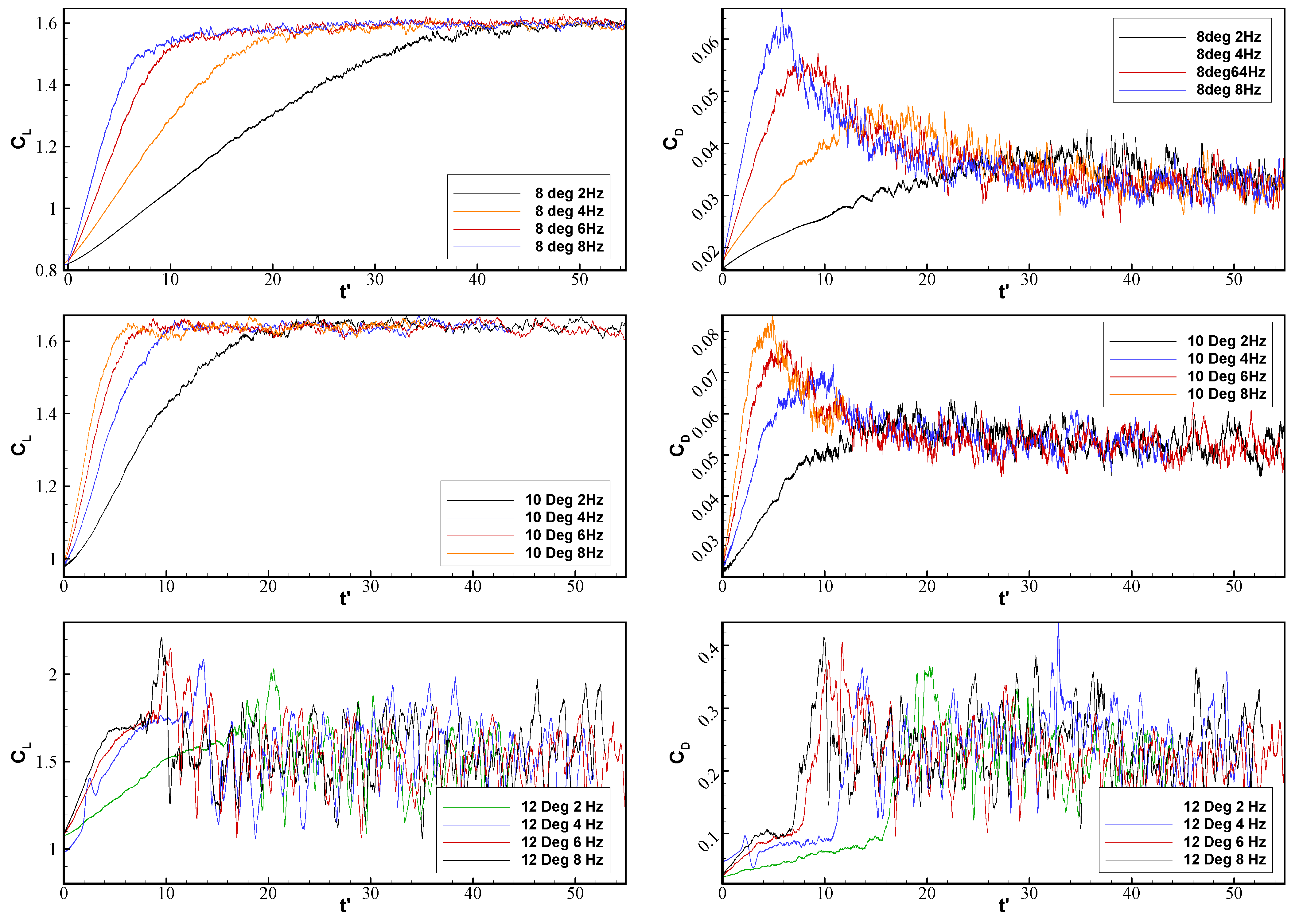
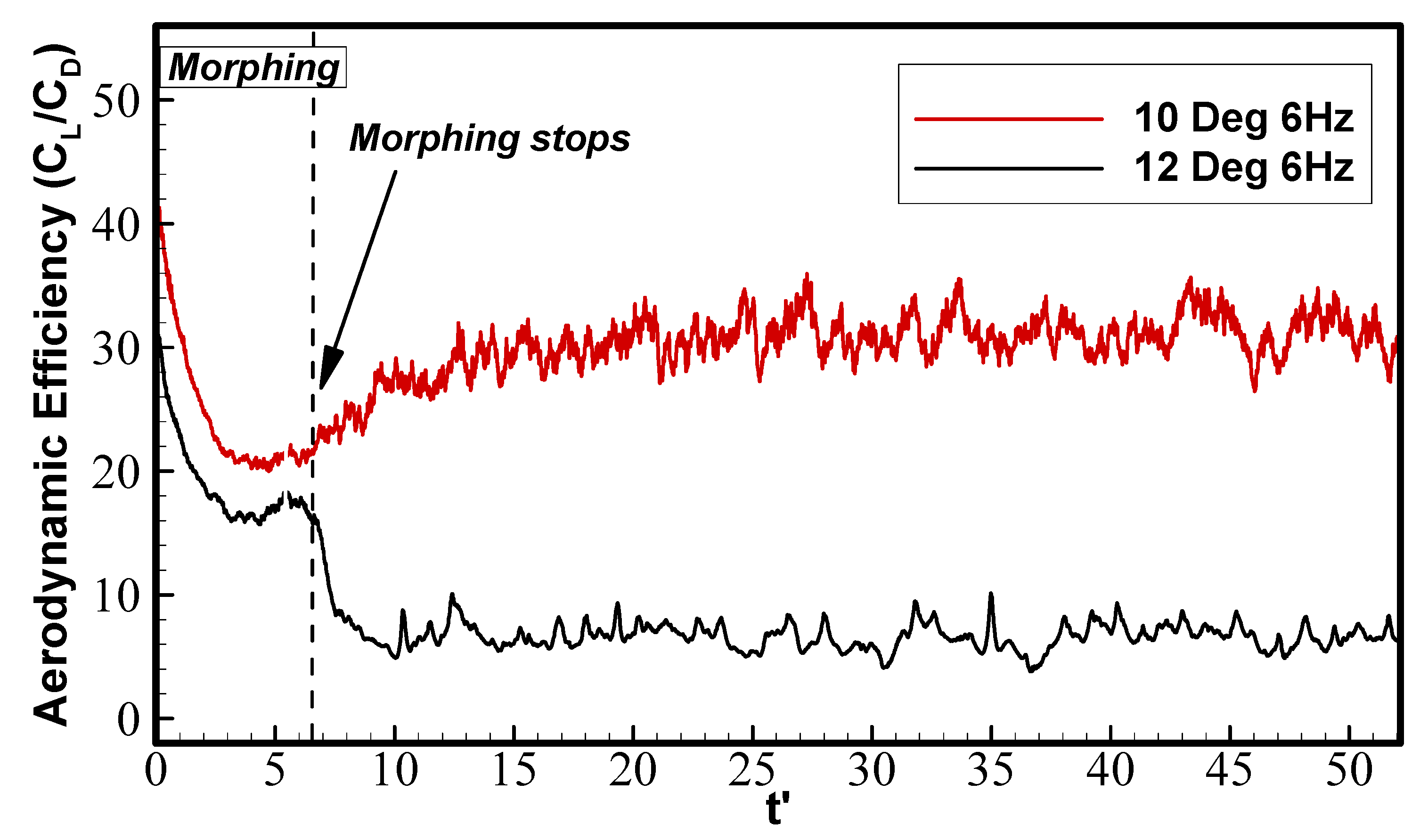
6.2. Morphing TEF Deflection
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Altshuler, D.L.; Bahlman, J.W.; Dakin, R.; Gaede, A.H.; Goller, B.; Lentink, D.; Segre, P.S.; Skandalis, D.A. The biophysics of bird flight: Functional relationships integrate aerodynamics, morphology, kinematics, muscles, and sensors. Can. J. Zool. 2015, 93, 961–975. [Google Scholar] [CrossRef] [Green Version]
- Abdessemed, C.; Viba, J. Investigation of flight of micro aerial vehicle with flapping wings. Eng. Rural Dev. 2014, 13, 234–240. [Google Scholar]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A Review of Morphing Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Wang, L.; Li, L.; Fu, S. A comparative study of DES type methods for mild flow separation prediction on a NACA0015 airfoil. Int. J. Numer. Methods Heat Fluid Flow 2017, 27, 2528–2543. [Google Scholar] [CrossRef]
- Leveque, E.; Touil, H.; Malik, S.; Ricot, D.; Sengissen, A. Wall-modeled large-eddy simulation of the flow past a rod-airfoil tandem by the Lattice Boltzmann method. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 1096–1116. [Google Scholar] [CrossRef]
- Haldar, A.; Jansen, E.; Hofmeister, B.; Bruns, M.; Rolfes, R. Analysis of Novel Morphing Trailing Edge Flap Actuated by Multistable Laminates. AIAA J. 2020, 58, 3149–3158. [Google Scholar] [CrossRef]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Flow Response to Rapid Morphing Flap Deflection. In Proceedings of the 54th 3AF International Conference on Applied Aerodynamics, Paris, France, 26–27 March 2019; pp. 1–10. [Google Scholar]
- Williams, D.; Kerstens, W.; Pfeiffer, J.; King, R.; Colonius, T. Unsteady lift suppression with a robust closed loop controller. In Active Flow Control II; Springer: Berlin, Germany, 2010; pp. 19–30. [Google Scholar]
- Abdessemed, C.; Yao, Y.; Narayan, P.; Bouferrouk, A. Unsteady parametrization of a morphing wing design for improved aerodynamic performance. In Proceedings of the 52rd 3AF International Conference on Applied Aerodynamics, Lyon, France, 27–29 March 2017; pp. 1–10. [Google Scholar]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Morphing airfoils analysis using dynamic meshing. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 1117–1133. [Google Scholar] [CrossRef] [Green Version]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Analysis of a 3D Unsteady Morphing Wing with Seamless Side-edge Transition. In Proceedings of the 36th AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; AIAA: Atlanta, GA, USA, 2018; p. 2897416. [Google Scholar] [CrossRef] [Green Version]
- Jones, G.; Santer, M.; Debiasi, M.; Papadakis, G. Control of flow separation around an airfoil at low Reynolds numbers using periodic surface morphing. J. Fluids Struct. 2018, 76, 536–557. [Google Scholar] [CrossRef] [Green Version]
- Abderahmane, M.; Yannick, B.T.; Nikolaos, S.; Jean-Baptiste, T.; Jean-François, R.; Yannick, H.; Marianna, B. Numerical investigation of frequency-amplitude effects of dynamic morphing for a high-lift configuration at high Reynolds number. Int. J. Numer. Methods Heat Fluid Flow 2019. ahead-of-print. [Google Scholar] [CrossRef] [Green Version]
- Jodin, G.; Motta, V.; Scheller, J.; Duhayon, E.; Döll, C.; Rouchon, J.F.; Braza, M. Dynamics of a hybrid morphing wing with active open loop vibrating trailing edge by time-resolved PIV and force measures. J. Fluids Struct. 2017, 74, 263–290. [Google Scholar] [CrossRef] [Green Version]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Aerodynamic Analysis of a harmonically Morphing Flap Using a Hybrid Turbulence Model and Dynamic Meshing. In Proceedings of the 36th AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Atlanta, GA, USA, 2018; pp. 1–15. [Google Scholar] [CrossRef]
- Abdessemed, C.; Bouferrouk, A.; Yao, Y. Aerodynamic and Aeroacoustic Analysis of a Harmonically Morphing Airfoil Using Dynamic Meshing. Acoustics 2021, 3, 177–199. [Google Scholar] [CrossRef]
- Medina, A.; Hemati, M.S.; Rockwood, M. Separated flow response to rapid flap deflection. AIAA J. 2020, 58, 1446–1457. [Google Scholar] [CrossRef]
- Amitay, M.; Glezer, A. Flow transients induced on a 2D airfoil by pulse-modulated actuation. Exp. Fluids 2006, 40, 329–331. [Google Scholar] [CrossRef]
- Medina, A.; Ol, M.V.; Mancini, P.; Jones, A. Revisiting Conventional Flaps at High Deflection Rate. AIAA J. 2017, 55, 2676–2685. [Google Scholar] [CrossRef]
- Woods, B.K.; Bilgen, O.; Friswell, M.I. Wind tunnel testing of the fish bone active camber morphing concept. J. Intell. Mater. Syst. Struct. 2014, 25, 772–785. [Google Scholar] [CrossRef]
- ANSYS. Release 18.2, Help System 2018; ANSYS: Canonsburg, PA, USA, 2018. [Google Scholar]
- Menter, F. Stress-blended eddy simulation (SBES)—A new paradigm in hybrid RANS-LES modeling. In Notes on Numerical Fluid Mechanics and Multidisciplinary Design; Springer: Cham, Switzerland, 2016; Volume 137, pp. 27–37. ISBN 978-3-319-70031-1. [Google Scholar] [CrossRef]
- Housman, J.A.; Stich, G.D.; Kiris, C.C. Predictions of slat noise from the 30p30n at high angles of attack using zonal hybrid rans-les. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019; p. 2438. [Google Scholar] [CrossRef] [Green Version]
- Mahak, M.; Naqavi, I.Z.; Tucker, P.G. Cost-effective hybrid RANS-LES type method for jet turbulence and noise prediction. Int. J. Aeroacoust. 2017, 16, 97–111. [Google Scholar] [CrossRef]
- Arunajatesan, S.; Sinha, N. Hybrid RANS-LES Modeling for Cavity Aeroacoutics Predictions. Int. J. Aeroacoust. 2003, 2, 65–93. [Google Scholar] [CrossRef]
- Syawitri, T.P.; Yao, Y.; Yao, J.; Chandra, B. Assessment of stress-blended eddy simulation model for accurate performance prediction of vertical axis wind turbine. Int. J. Numer. Methods Heat Fluid Flow 2020, 31, 655–673. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Montazeri, H.; Blocken, B. CFD analysis of dynamic stall on vertical axis wind turbines using Scale-Adaptive Simulation (SAS): Comparison against URANS and hybrid RANS/LES. Energy Convers. Manag. 2019, 196, 1282–1298. [Google Scholar] [CrossRef]
- Nicoud, F.; Ducros, F. Subgrid-scale stress modelling based on the square of the velocity gradient tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Abdessemed, C. Dynamic Mesh Framework for Morphing Wings CFD. Ph.D. Thesis, University of the West of England, Bristol, UK, 2019. [Google Scholar]
- Abdessemed, C. Dynamic Mesh Framework for Morphing Wings CFD—User Defined Function; Zenodo: Genève, Switzerland, 2020. [Google Scholar] [CrossRef]
- Jacobs, E.; Ward, K.; Pinkerton, R. The characteristics of 78 related airfoil sections from tests in the variable-density wind tunnel. Natl. Advis. Comm. Aeronaut. 1933, 299–354. [Google Scholar] [CrossRef]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.; Narayan, P. Influence of non-iterative time-advancement schemes on the aerodynamic prediction of pitching airfoils using dynamic mesh. In Proceedings of the 8th International Symposium on Physics of Fluids (ISPF8), Xi’an, China, 10–13 June 2019. [Google Scholar]
- Abdessemed, C.; Yao, Y.; Bouferrouk, A.A.; Narayan, P. Aeroacoustic Investigation of a Harmonically Morphing Trailing Edge Flap. In Proceedings of the 53rd 3AF International Conference on Applied Aerodynamics, Salon de Provence, France, 23–26 March 2018; pp. 23–26. [Google Scholar]
- Drela, M. XFOIL: An analysis and design system for low Reynolds number airfoils. In Proceedings of the Conference on Low Reynolds Number Airfoil Aerodynamics, University of Notre Dame, Notre Dame, IN, USA, 5–7 June 1989; Volume 54, pp. 1–12. [Google Scholar] [CrossRef]
- Sheldahl, R.E.; Klimas, P.C. Aerodynamic Characteristics of Seven Symmetrical Airfoil Sections through 180-Degree Angle of Attack for Use in Aerodynamic Analysis of Vertical Axis Wind Turbines; SAND80-211; Sandia National Labs: Albuquerque, NM, USA, 1981; p. 118. [CrossRef] [Green Version]
- Church, B.; Paschereit, C.O.; Holst, D.; Saverin, J.; Pechlivanoglou, G.; Tüzüner, E.; Nayeri, C.N. Experimental Analysis of a NACA 0021 Airfoil Section Through 180-Deg Angle of Attack at Low Reynolds Numbers for Use in Wind Turbine Analysis. J. Eng. Gas Turbines Power 2018, 141, 041012. [Google Scholar] [CrossRef]
- Ladson, C.L. Effects of Independent Variation of Mach and Reynolds Numbers on the Low-Speed Aerodynamic Characteristics of the NACA 0012 Airfoil Section; Nasa Tm 4074; NASA Langley Research Center: Hampton, VA, USA, 1988; Volume 97. [CrossRef]
- Langtry, R.; Menter, F. Transition Modeling for General CFD Applications in Aeronautics. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005; p. 522. [Google Scholar] [CrossRef] [Green Version]
- Benton, S.I.; Visbal, M.R. The onset of dynamic stall at a high, transitional Reynolds number. J. Fluid Mech. 2018, 861, 860–885. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| wte = 0.05%c, AoA = 8° | ||||
| Frequencies (Hz) | 1 | 2 | 4 | 6 |
| wte = 0.05%c, AoA = 10° | ||||
| Frequencies (Hz) | 2 | 4 | 6 | 8 |
| wte = 0.05%c, AoA = 12° | ||||
| Frequencies (Hz) | 2 | 4 | 6 | 8 |
| Mesh Metric | Baseline | Deformed at Max Deflection | Difference | Range of the Metrics | Solver Requirements |
|---|---|---|---|---|---|
| Average Orthogonal Quality | 0.9624 | 0.9479 | −2% | 0 (worst) to 1 (best) | the closer to 1 the better |
| Minimum Orthogonal Quality | 0.0609 | 0.06052 | −1% | Larger than 0.01 | |
| Maximum Skewness | 0.6825 | 0.7031 | 3% | 0 (best) to 1 (worst) | Lower than 0.98 |
| Frequency (Hz) | Morphing Time Tmoprh (s) | Morphing Stop Time | |
|---|---|---|---|
| 1 | 0.25 | 0.75 | 43.74 |
| 2 | 0.125 | 0.625 | 21.87 |
| 4 | 0.0625 | 0.5625 | 10.93 |
| 6 | 0.042 | 0.542 | 7.29 |
| 8 | 0.03125 | 0.53125 | 5.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdessemed, C.; Yao, Y.; Bouferrouk, A. Near Stall Unsteady Flow Responses to Morphing Flap Deflections. Fluids 2021, 6, 180. https://doi.org/10.3390/fluids6050180
Abdessemed C, Yao Y, Bouferrouk A. Near Stall Unsteady Flow Responses to Morphing Flap Deflections. Fluids. 2021; 6(5):180. https://doi.org/10.3390/fluids6050180
Chicago/Turabian StyleAbdessemed, Chawki, Yufeng Yao, and Abdessalem Bouferrouk. 2021. "Near Stall Unsteady Flow Responses to Morphing Flap Deflections" Fluids 6, no. 5: 180. https://doi.org/10.3390/fluids6050180
APA StyleAbdessemed, C., Yao, Y., & Bouferrouk, A. (2021). Near Stall Unsteady Flow Responses to Morphing Flap Deflections. Fluids, 6(5), 180. https://doi.org/10.3390/fluids6050180