
Evaluation of Magnus Force on Check Ball Behavior in a Hydraulic L Shaped Pipe


Abstract
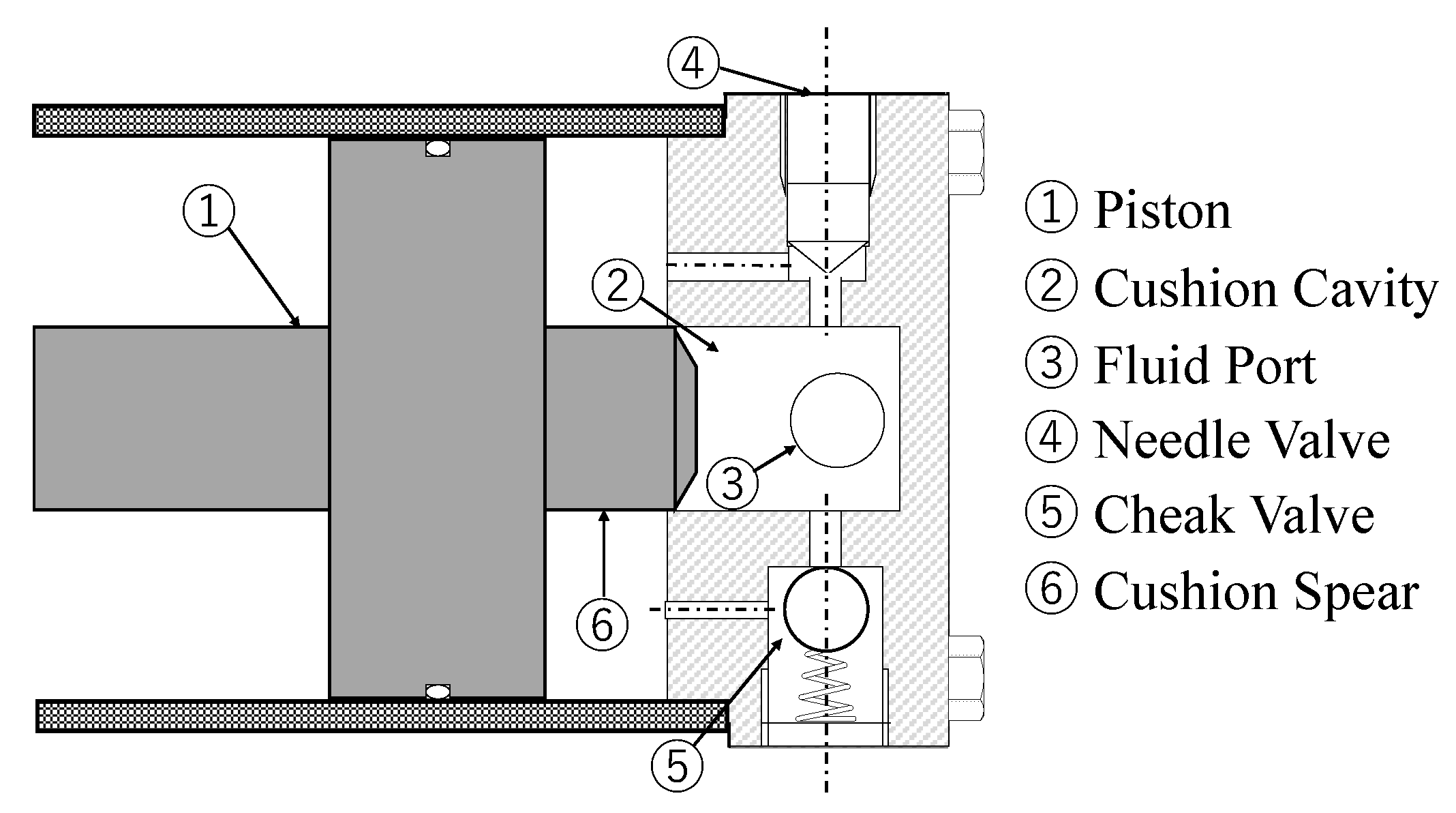
:1. Introduction
2. Numerical Simulation
2.1. Governing Equations
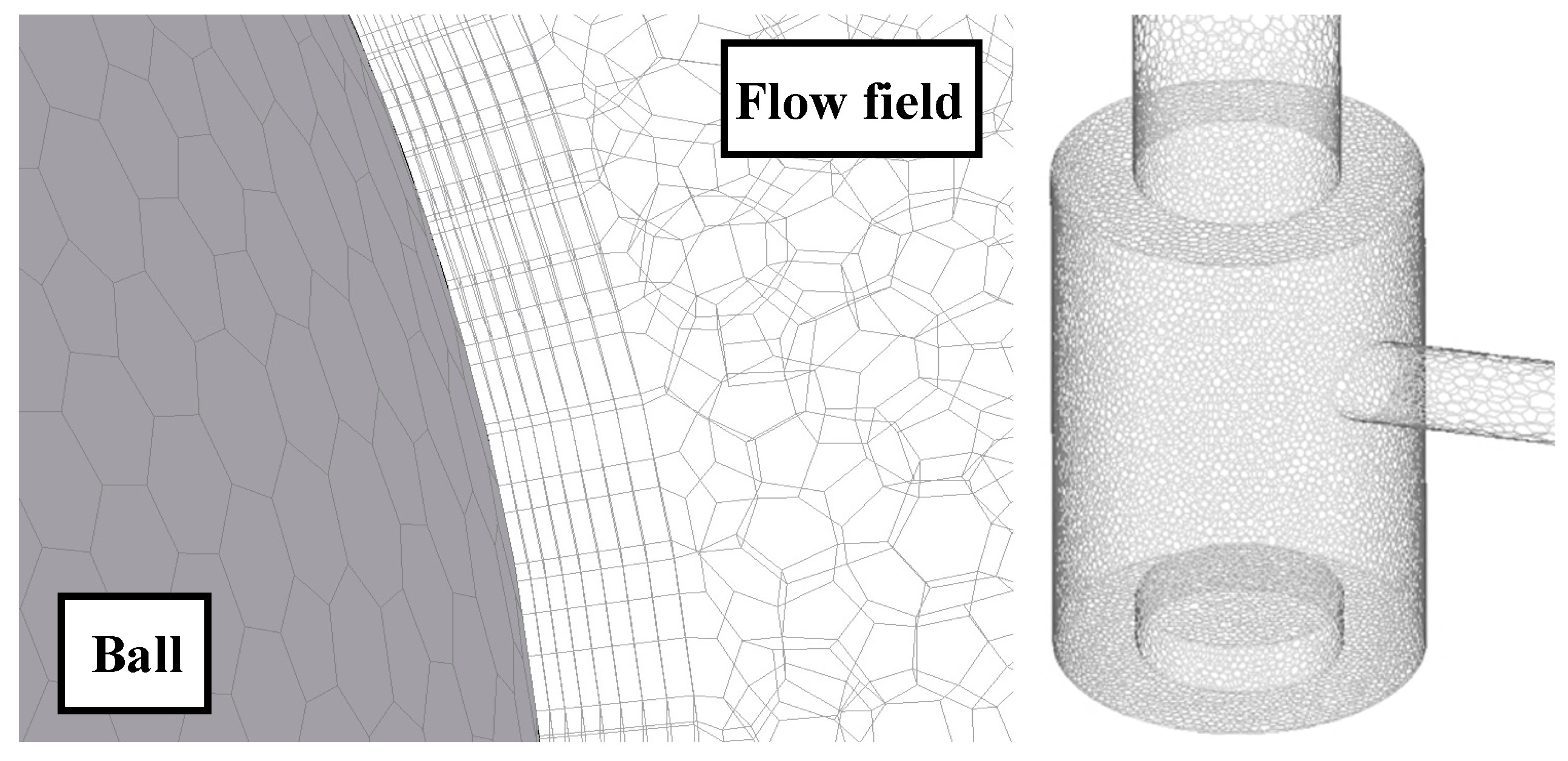
2.2. Meshing Method
2.3. CAE Analysis Method
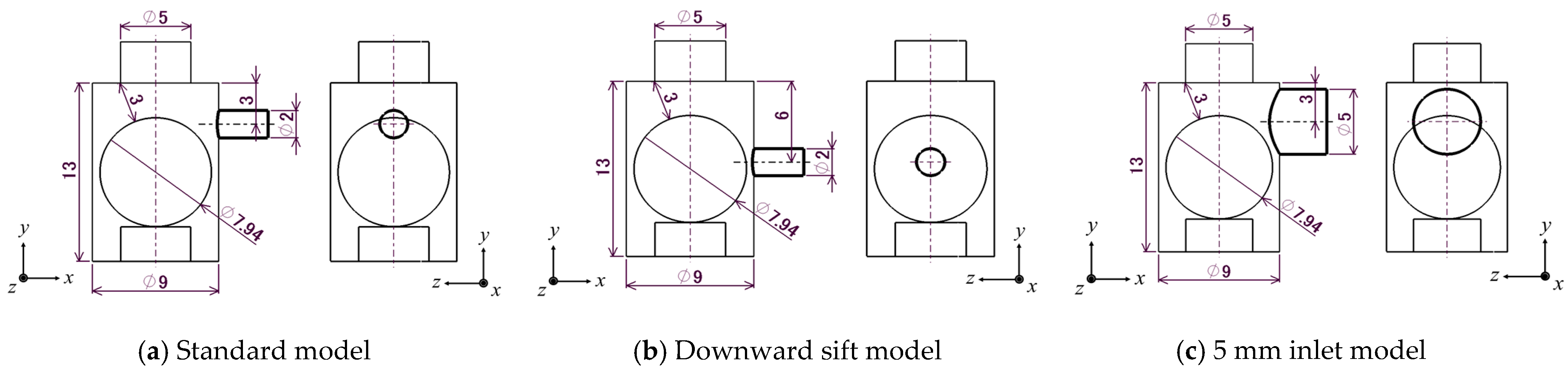
2.4. CAE Analysis Models
2.5. CAE Analysis Conditions
3. CAE Analysis Results
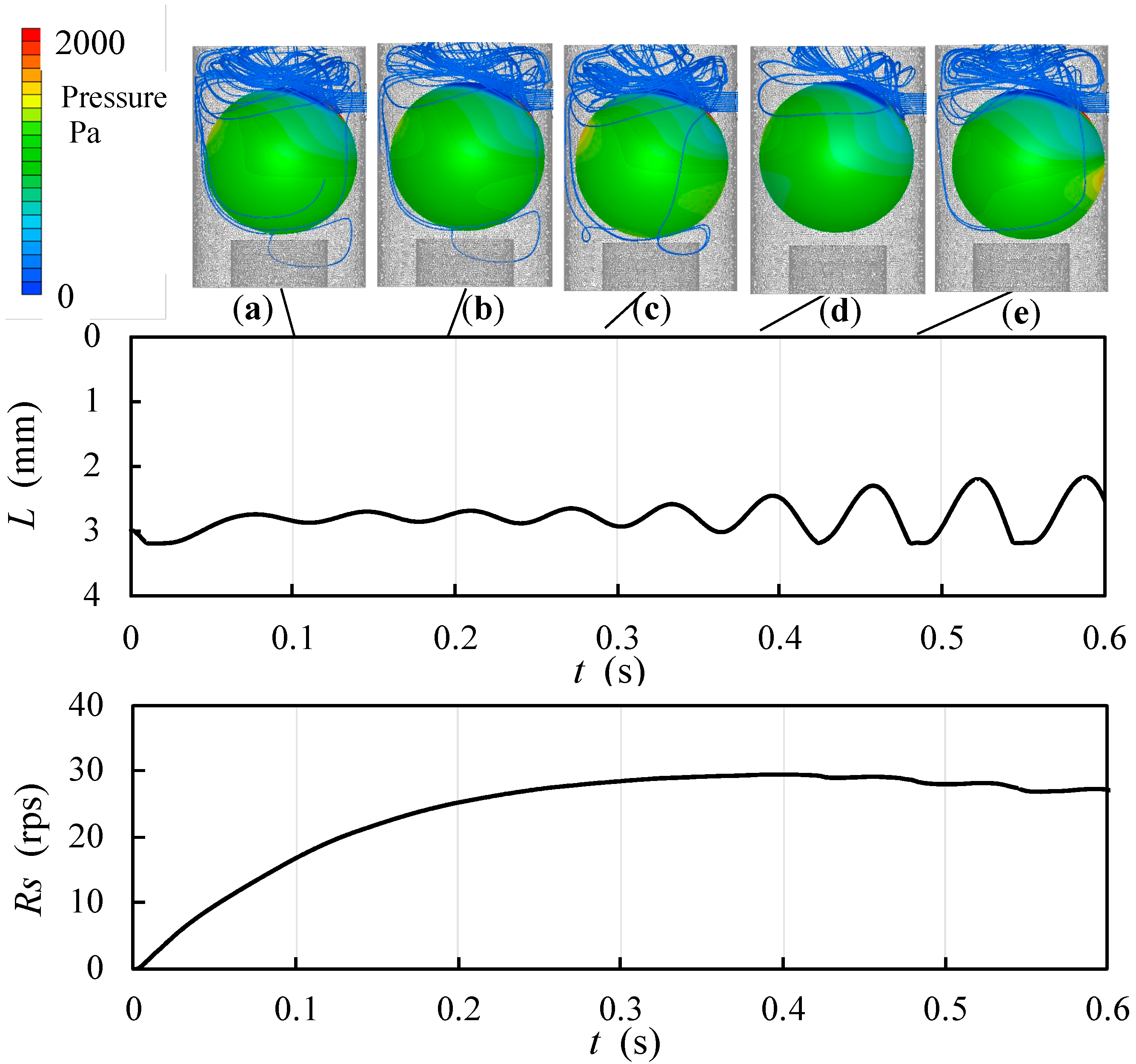
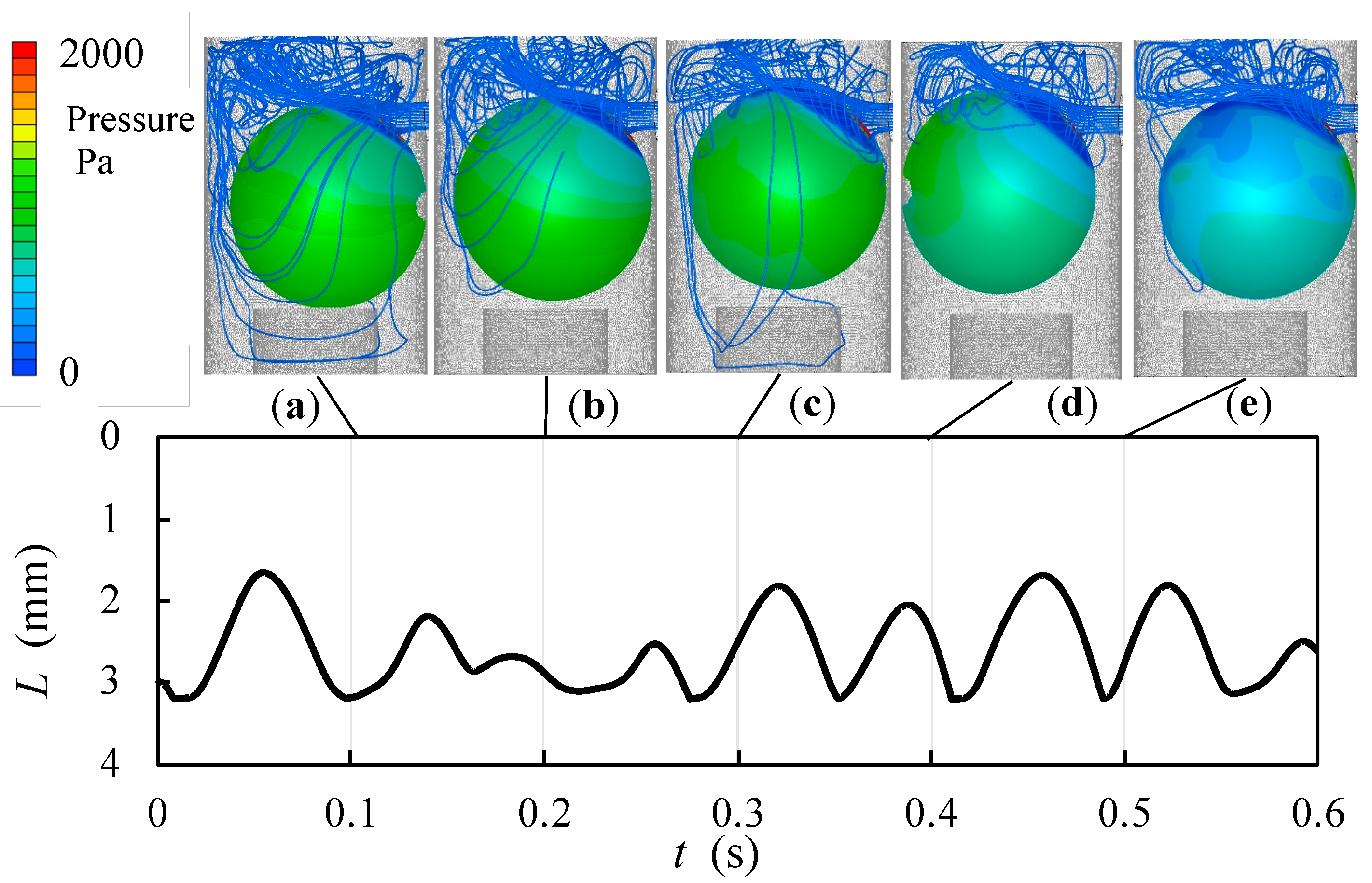
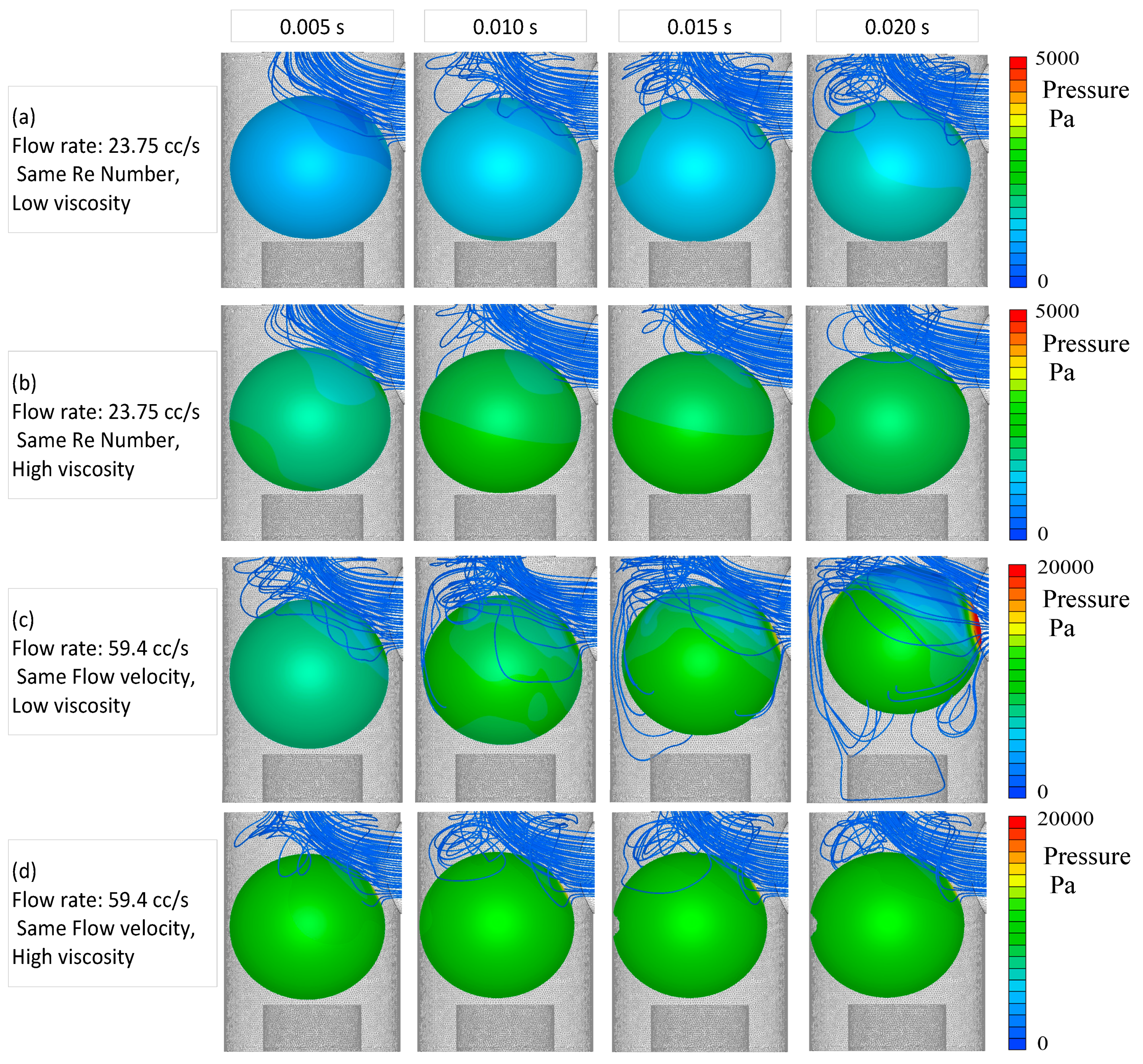
3.1. Effect of Kinetic Viscosity of Hydraulic Fluid on Ball Behavior
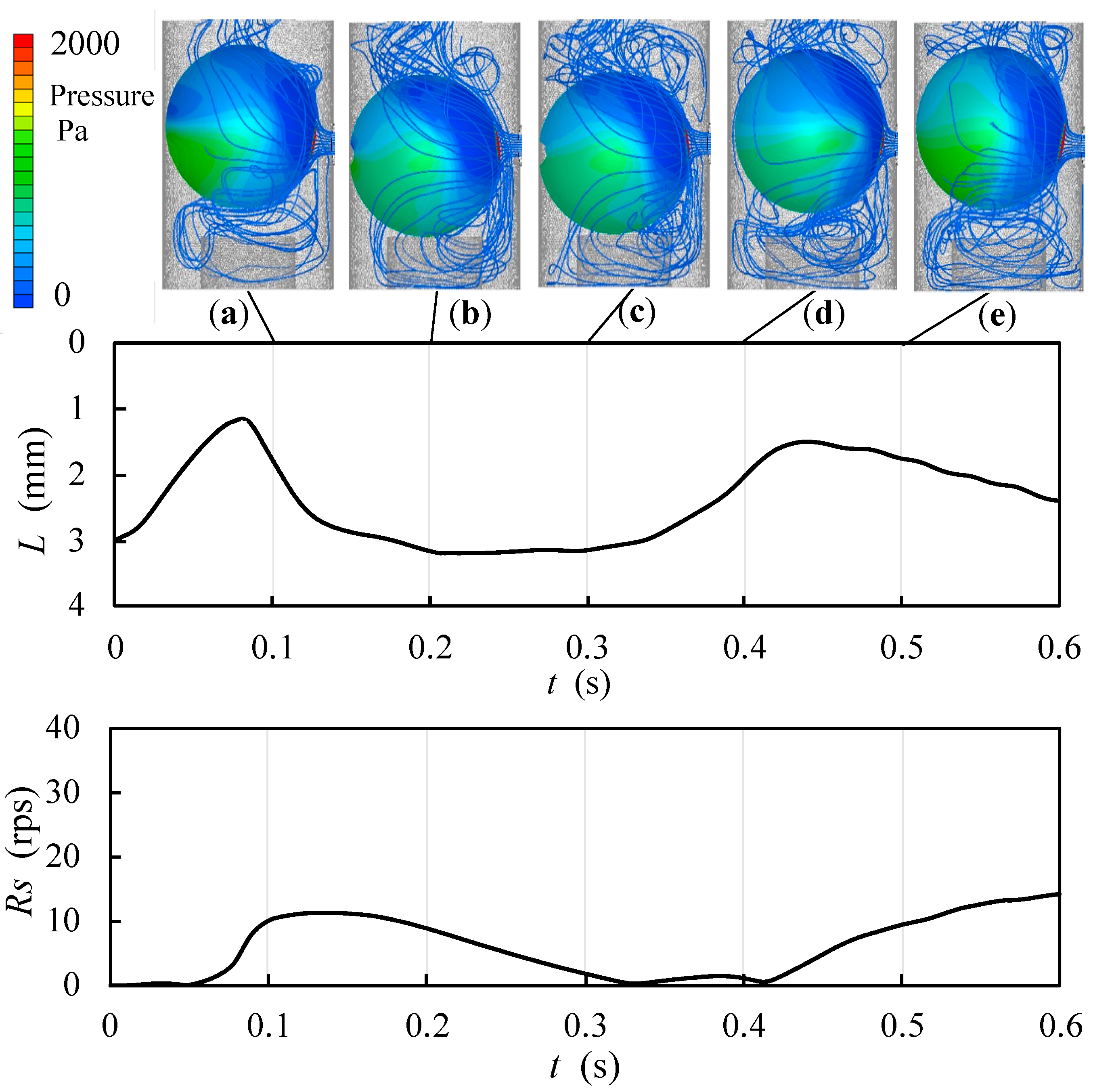
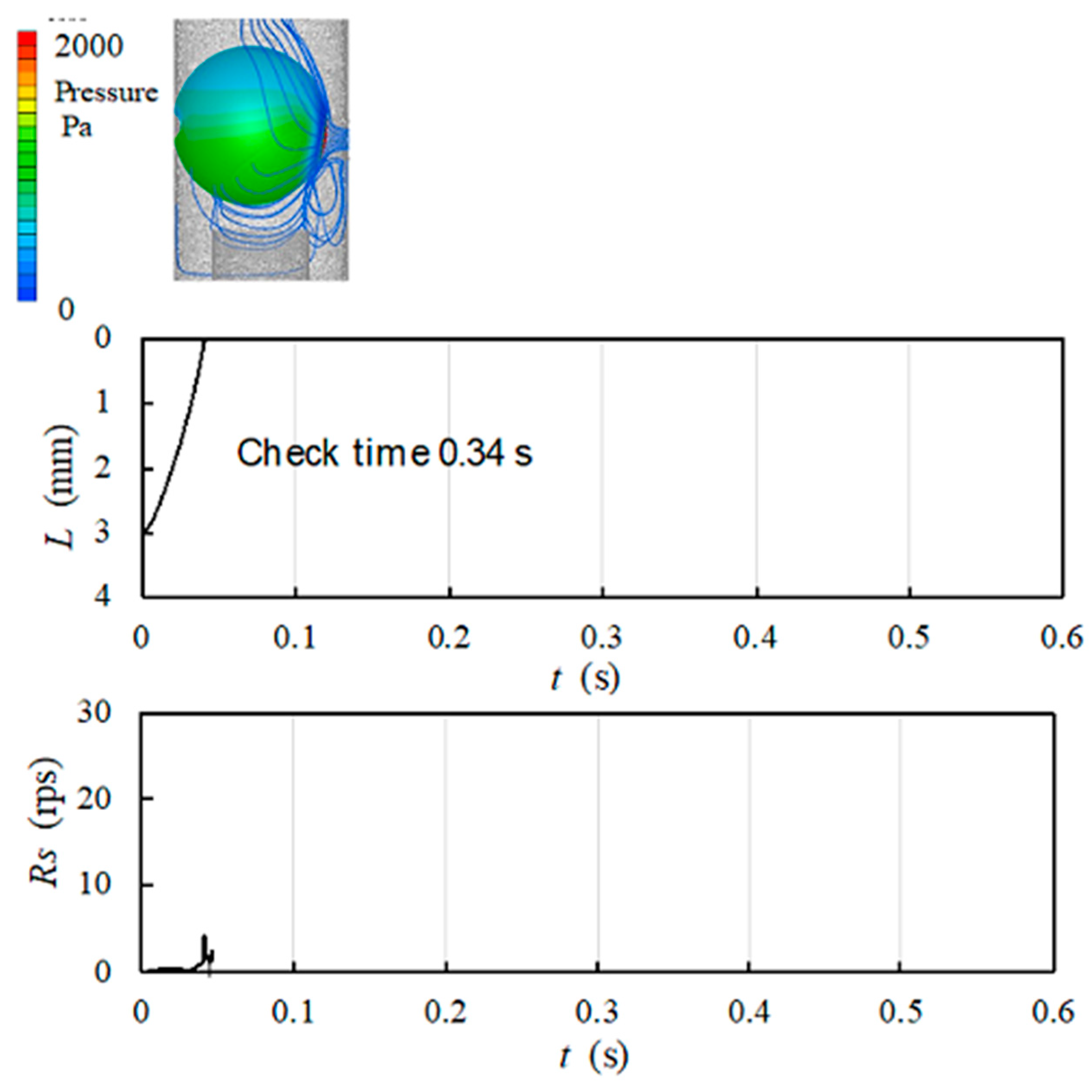
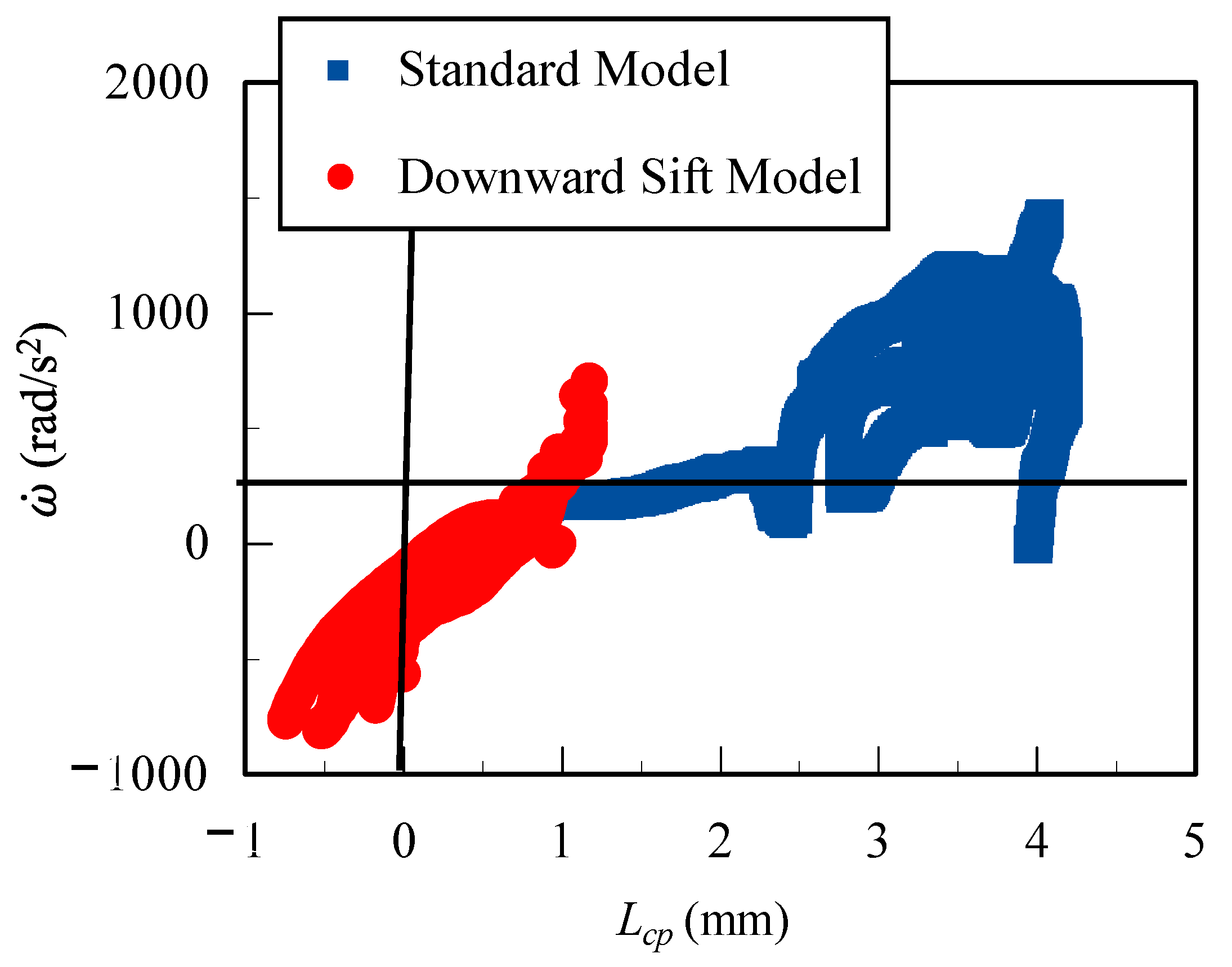
3.2. Effect of the Vertical Position of the Inlet Pipe on the Ball Behavior
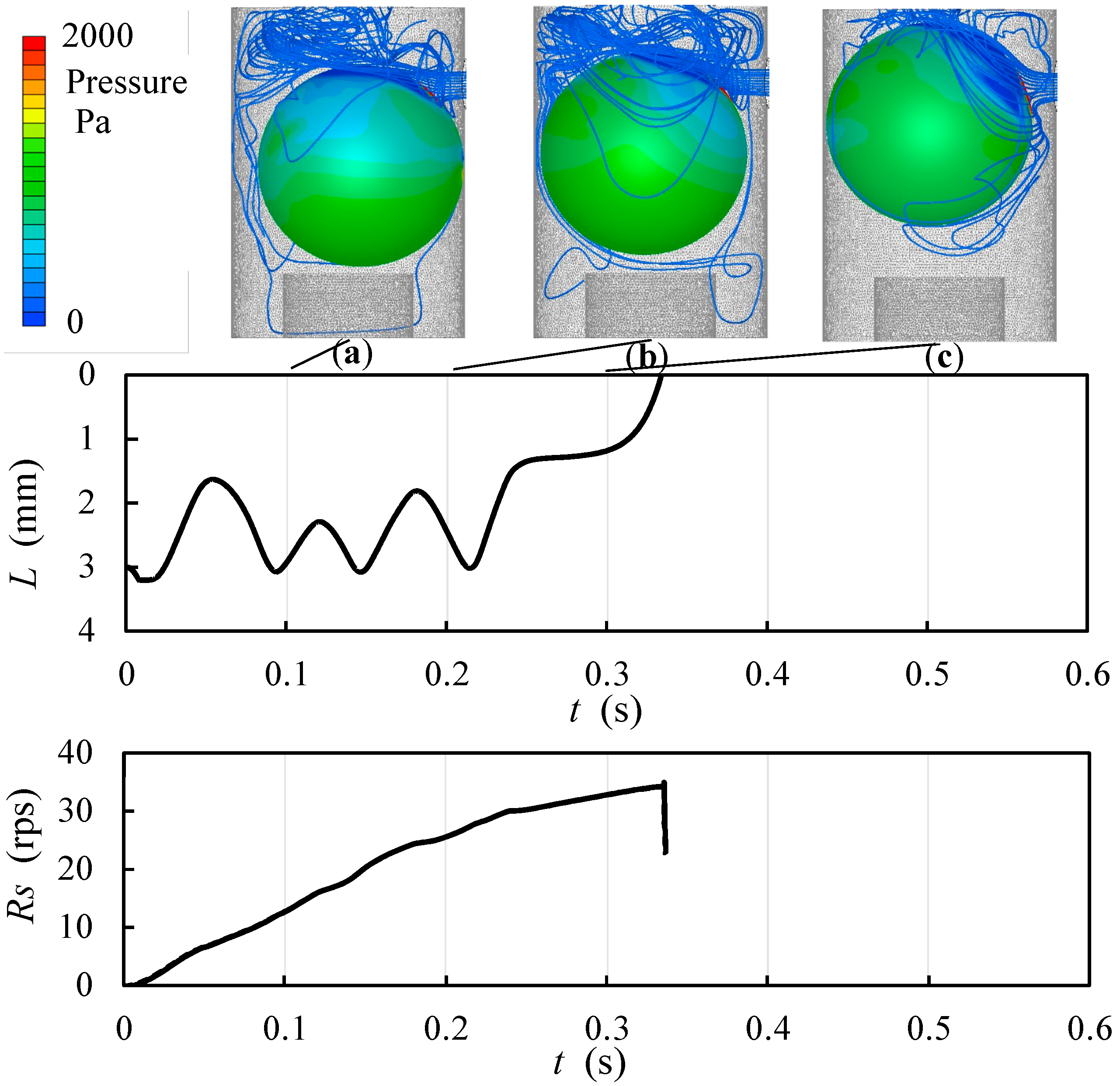
3.3. Effect of Inlet Diameter on Ball Rotation and Translational Motion
4. Discussion
5. Summary/Conclusions
- (1)
- CAE analysis using a polymerized grid was carried out to observe the flow around the check ball, surface pressure, and rotation speed;
- (2)
- The Magnus force caused by the ball rotation was evaluated by carrying out CAE analysis with fixed rotation and only translation being allowed;
- (3)
- When the inlet pipe was at the top, the ball did not rise when there was no rotation or when the viscosity was high;
- (4)
- As the rotation speed of the check ball increased, circulating flow developed, the Magnus force increased, and the ball rose faster;
- (5)
- If the position of the inflow pipe shifted downward, there was almost no rotation; if the viscosity was low, the ball did not rise;
- (6)
- The Magnus force acting on the check ball changed depending on the direction of the rotational motion of the check ball;
- (7)
- The Magnus force caused the check ball to rotate faster.
Funding
Acknowledgments
Conflicts of Interest
References
- Tsukiji, T.; Suzuki, Y. Numerical simulation of an unsteady axisymmetric flow in a poppet valve using the vortex method. ESAIM 1996, 1, 415–427. [Google Scholar] [CrossRef] [Green Version]
- Hong, F.G.X.; Huayong, Y.; Tsukiji, T. Numerical and experimental investigation of cavitating flow in oil hydraulic ball valve. In Proceedings of the Fifth JFPS International Symposium on Fluid Power NARA, Nara, Japan, 12–15 November 2002; Volume 2, pp. 923–928. [Google Scholar]
- Hayase, T.; Humpherey, J.A.C.; Greif, R. A consistently formulated QUICK scheme for fast and stable convergence using finite-volume iterative calculation procedures. J. Comput. Phys. 2013, 1, 108–118. [Google Scholar]
- Grossschmidt, G.; Harf, M. Part 1: Fundamentals, COCO-SIM object-oriented multi-pole modelling and simulation environment for fluid power systems. Int. J. Fluid Power 2009, 10, 91–100. [Google Scholar]
- Sen, S.; Mittal, S. Free vibration of a square cylinder at low Reynolds numbers. J. Fluids Struct. 2011, 27, 875–884. [Google Scholar] [CrossRef]
- Yonezawaa, K.; Ogawa, R.; Ogi, K.; Takino, T.; Tsujimoto, Y.; Endo, T.; Tezuka, K.; Morita, R.; Inada, F. Flow-induced vibration of a steam control valve. J. Fluids Struct. 2012, 35, 76–88. [Google Scholar] [CrossRef]
- Lee, H.; Lee, T.; Chang, Y. Numerical simulation of flow-induced bi-directional oscillations. J. Fluids Struct. 2013, 37, 220–231. [Google Scholar] [CrossRef]
- Zhao, M. Numerical investigation of two-degree-of-freedom vortex-induced vibration of a circular cylinder in oscillatory flow. J. Fluids Struct. 2013, 39, 41–59. [Google Scholar] [CrossRef]
- Goncalves, R.T.; Rosetti, G.F.; Franzini, G.R.; Meneghini, J.R.; Fujarra, A.L.C. Two-degree-of-freedom vortex-induced vibration of circular cylinders with very low aspect ratio and small mass ratio. J. Fluids Struct. 2013, 39, 237–257. [Google Scholar] [CrossRef]
- Kajiwara, S. Experimental observations of the fluid flow within the L-shaped check valve. Int. J. Fluid Power 2013, 14, 17–23. [Google Scholar] [CrossRef]
- Kajiwara, S. Effect of the check ball and inlet position on hydraulic L-shaped check ball behavior. J. Fluids Struct. 2014, 48, 497–506. [Google Scholar] [CrossRef]
- White, B.R.; Schulz, J.C. Magnus effect in saltation. J. Fluid Mech. 1977, 13, 497–512. [Google Scholar] [CrossRef]
- Abe, K.; Kondoh, T.; Nagano, Y. A new turbulence model for predicting fluid flow and heat transfer in separating and reattaching flows—I. Flow field calculations. Int. J. Heat Mass Transf. 1994, 37, 139–151. [Google Scholar] [CrossRef]
- Hirt, C.W.; Amsden, A.A.; Cook, J.L. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | |||||
|---|---|---|---|---|---|---|
| Inlet Diameter (mm) | 2 | 5 | 5 | |||
| Inlet Flow Velocity (m/s) | 3.02 | 1.21 | 3.02 | |||
| Fluid Density, r (kg/m3) | 868.6 | 868.6 | 868.6 | |||
| Inlet Volume Flow Rate (m3/s) | 9.5 × 10−6 | 23.75 × 10−6 | 59.4 × 10−6 | |||
| Kinematic Viscosity, n (mm2/s) | 7 | 35.1 | 7 | 35.1 | 7 | 35.1 |
| Reynolds Number, Re | 8.57 × 102 | 1.71 × 102 | 8.57 × 102 | 1.71 × 102 | 21.4 × 102 | 4.28 × 102 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kajiwara, S. Evaluation of Magnus Force on Check Ball Behavior in a Hydraulic L Shaped Pipe. Fluids 2021, 6, 191. https://doi.org/10.3390/fluids6050191
Kajiwara S. Evaluation of Magnus Force on Check Ball Behavior in a Hydraulic L Shaped Pipe. Fluids. 2021; 6(5):191. https://doi.org/10.3390/fluids6050191
Chicago/Turabian StyleKajiwara, Shinji. 2021. "Evaluation of Magnus Force on Check Ball Behavior in a Hydraulic L Shaped Pipe" Fluids 6, no. 5: 191. https://doi.org/10.3390/fluids6050191
APA StyleKajiwara, S. (2021). Evaluation of Magnus Force on Check Ball Behavior in a Hydraulic L Shaped Pipe. Fluids, 6(5), 191. https://doi.org/10.3390/fluids6050191