1. Introduction
To extend the range of applicability of numerical simulation of turbulent flows beyond the limits of affordable direct numerical simulation (DNS), under-resolved simulations with physically or algorithmically based subgrid-scale (SGS) closures are widely used, typically within the large-eddy-simulation (LES) framework. For constant-property flow, the main role of the SGS closure of LES is to dissipate kinetic energy at the physically correct rate based on the flow state. A secondary process that is important in some circumstances is the transfer of kinetic energy from unresolved scales to the LES-resolved flow solution, and accordingly, modeling of this backscatter has been incorporated into SGS closures. The resulting two-way coupling is especially important when LES is extended from constant-property flow to multiphysics flow involving combinations of buoyancy, multiphase couplings, and velocity divergence due to, for example, thermochemical processes.
Here, an approach designed to capture these and other multiphysics effects within SGS closures for LES is described. Unlike typical parameterizations, it involves idealized but physically based treatments of SGS advective and diffusive transport and other SGS processes, such as those mentioned. The approach involves DNS-level resolution of spatial structure and flow unsteadiness, which increases its cost relative to parameterizations, but it is less costly than DNS because this fine resolution is restricted to representative lines of sight within individual LES control volumes (CVs). Cost is further mitigated to the extent that the fidelity of the SGS closure allows coarsening of the LES mesh while maintaining the needed level of accuracy.
The method used for SGS closure involves one-dimensional turbulence (ODT), a form of map-based stochastic advection that has been used previously for SGS closure of LES as well as in various standalone applications, as cited below. Here, an ODT-based SGS closure is formulated that draws upon previously reported formulations but also introduces various novel elements, whose details and physical interpretations are the main focus of the present contribution.
To begin, it is important to clarify what it means to close an LES using ODT. Suppose that exact underlying DNS-level data are available at all times in all LES CVs. Then the unclosed terms in the LES equations can be evaluated exactly, yielding a fully accurate closure. However, if the LES time advances an SGS kinetic-energy equation, then the DNS data might be used to close an unclosed term in that equation. This might not be an optimal use of the DNS data, but if the available data were inexact rather than exact, then they might turn out to be more useful for closing a model equation carried by the LES rather than for closing the unclosed terms obtained by filtering the exact equation. For reacting flows, a related example is use of the data either to close the filtered chemical state or to provide the LES with reaction rates that are used to time advance filtered, hence modeled, chemical-kinetic equations.
ODT, in this context, provides surrogate DNS data that can be used to close either the filtered, but not otherwise modeled, LES equations or unclosed terms in submodels appended to these equations. Development and demonstration of either type of closure involves many choices with regard to mesh geometry, filtering technique, numerical algorithms, application cases, etc., ultimately resulting in the evaluation of only one or a few of the many options.
For the present purpose of introducing the general concepts and physical modeling approaches on which any particular modeling instantiation would be based, the following approach is adopted here. It is shown how ODT can be formulated so that, with suitable large-scale input, its time advancement can provide a local flow solution that, when filtered, is a physically plausible surrogate of the updated local filtered velocity that would otherwise be evaluated by advancing the filtered momentum equation. Thus, as an alternative to advancement of that equation, the updated filtered flow field can be obtained by time advancing and then filtering the fully resolved flow state on each ODT domain. There is one ODT domain per CV of the coarse-grained mesh, so this procedure updates the entire filtered flow field.
With the introduction of a pressure projection that adjusts the filtered flow field so as to enforce continuity, this approach becomes a self-contained ODT-based low-Mach-number flow simulation. It is a bottom-up approach that treats the evolving ODT state as the physical flow solution, albeit modeled rather than exact, that can be filtered to obtain an LES-like coarse-grained velocity field. In this context, the coarse-grained pressure is an auxiliary field that communicates large-scale information to each ODT domain, where this information reflects the collective interactions among the ODT domains and the inflow, outflow, and boundary conditions. Owing to the absence of any time advancement of the filtered velocity field, this formulation is not LES per se, so it is more appropriately termed autonomous microscale evolution (AME).
It is shown here that AME is a potentially viable alternative to LES. Its capabilities and limitations in this regard are assessed, subject to more definitive future evaluation by means of numerical implementation and model validation studies. As noted, the assessment also addresses points relevant to ODT SGS closure of LES. In what follows, operations on filtered fields are generically termed LES processes in order to discuss them in a familiar context until sufficient information specific to AME is provided so that discussion of AME becomes meaningful.
3. Reynolds Stress and Subgrid-Scale Kinetic Energy
The analogy between AME and LES that is described in
Section 2.3 applies to physical interpretation as well as numerical modeling of time-advancement processes, particularly with regard to the SGS TKE budget. Features of SGS TKE production, transport, and dissipation in the ODT SGS closure are discussed conceptually in
Section 2.2.3. They are now considered with reference to the formal definitions of these quantities in LES.
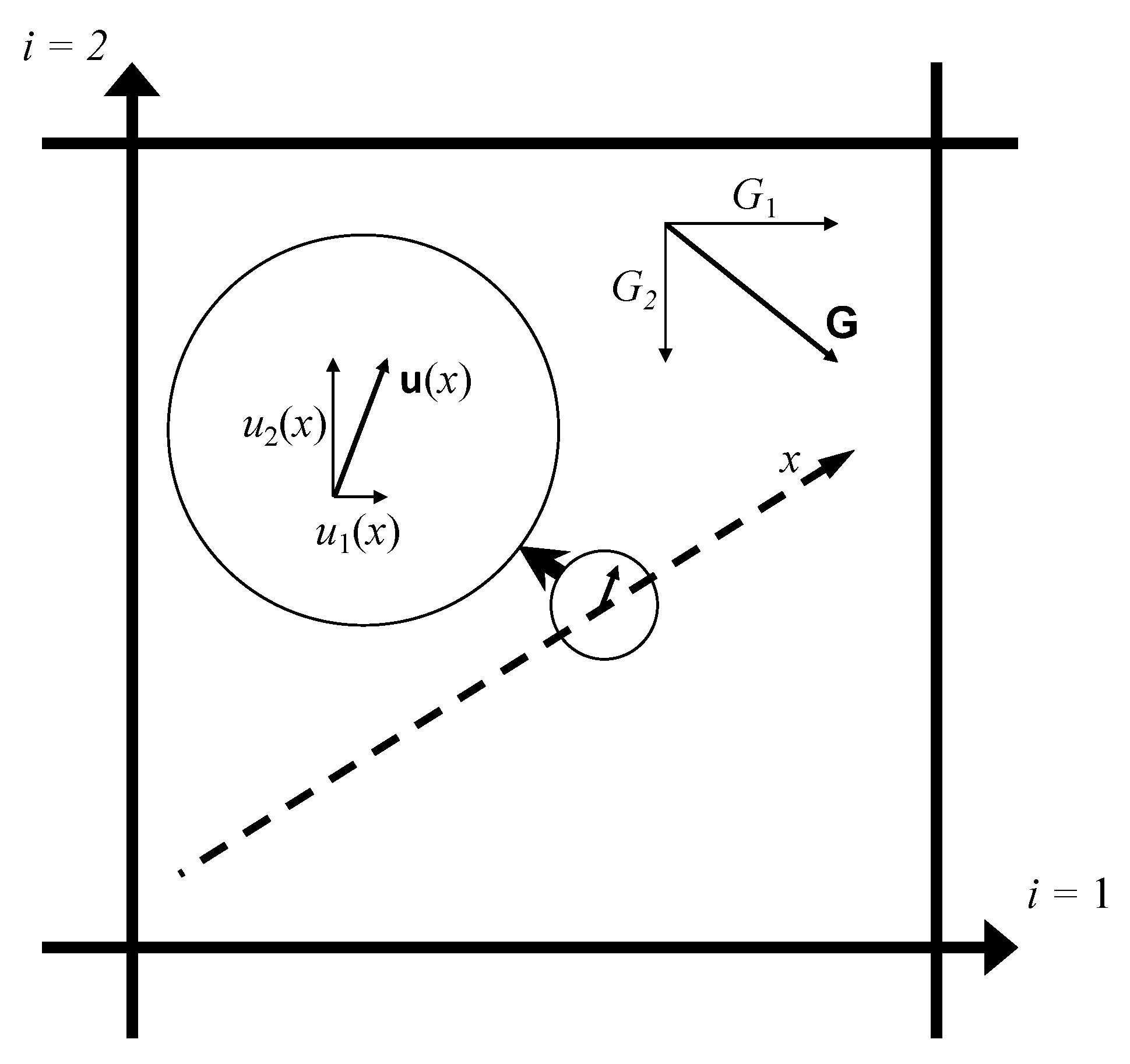
SGS TKE production is more precisely described as the conversion of coarse-grained kinetic energy into SGS TKE. One factor in the expression for the conversion rate is the Reynolds stress, whose evaluation in AME is considered first.
Splicing is the AME implementation of coarse-grained advection. Splicing is CV-to-CV transfer of portions of ODT velocity-component profiles, generically denoted
u, where the transfer is governed by CV face velocities, generically
. (Vector operations and the associated component indexing conform to standard conventions so scalar notation is used for clarity.) The
u fluctuation profile on an ODT domain is denoted
. The SGS TKE (per unit mass in what follows) is generically denoted
, ignoring both component indexing and summation over components. Consistent with this, a 1D array of CVs is considered (or equivalently, a multidimensional array with nonzero spatially uniform
in only one direction), as in
Section 2.2.1.
On an ODT domain
, suppose that a sub-interval
is designated to be transferred to the ODT domain in the CV to its right, corresponding to positive
. In a coarse-grained sense, the displacement of this sub-interval is
, while the remainder of the
u profile is unmoved by this transfer in a coarse-grained sense. (As explained in
Section 7,
D can exceed
W while nevertheless representing the flow state in the width-
W extent of the CV in direction
x. Here, the default case
is chosen for simplicity.) On this basis, the coarse-grained displacement of the
u profile is zero except for the selected size-
interval. The advecting velocity governing the displacement of that interval is denoted
. Accordingly, the profile of the advecting velocity
in
is
Box filtering of
v over the ODT domain gives
and hence
. This identifies the ODT profile of the velocity fluctuation
as
This shows that the face velocity can be interpreted as a box-filtered velocity, thus motivating the notation
that has been adopted.
Similarly, the fluctuation of the advected velocity is
. Spatial averaging of the product of
and
then gives the contribution of the outbound transfer of the size-
interval to the box-filtered Reynolds stress,
where
denotes the average of
u over
and
is the outflow endpoint
D of the ODT domain.
The outbound fluid is replaced by inbound fluid occupying a size- interval for which owing to its attachment to the inflow endpoint. The ODT state in the CV that supplies this fluid is denoted . The filtered value of the interval that is transferred rightward, denoted , is in general different from , where the notation refers to the distinct size- intervals containing the inbound and outbound fluid respectively. The inbound and outbound transfers convert the original profile u into a new profile U. Box filtering of U gives , where denotes the average of u over the size region not removed during the outbound transfer.
The inbound fluid enters the CV through the face opposite to the outflow considered thus far. As noted,
has the same value at both faces, which is reflected by the equal sizes of the advected fluid intervals. The box-filtered Reynolds stress associated with the inbound transfer is
where
is specified by Equation (
5) with
u replaced by
.
The new total (filtered plus SGS) kinetic energy is
, which is the sum of the filtered and SGS kinetic energies,
and
respectively, where
. Similarly, the initial SGS kinetic energy is
, where
. Then the splicing-induced SGS TKE change
is expressed as
consisting of conversion
of filtered kinetic energy into SGS kinetic energy, advection
by the resolved flow, turbulent transport
, subgrid transport
, and viscous dissipation
, respectively.
This specializes the conventional decomposition of
[
14] to the setup analyzed here. The conventional pressure and viscous transport terms are omitted because splicing involves no represention of SGS pressure fluctuations or viscous fluxes across cell faces.
is included to indicate that dissipation of SGS TKE occurs during ODT advancement, as explained in
Section 2.2.3. Because the splicing operation is not dissipative,
is omitted from the application of Equation (
8) to splicing that follows.
The approach is to evaluate
using the appropriate specializations of the terms on the right-hand size and then to compare the outcome to the conventional expression for
and
. Extending interval-restricted averaging to arbitrary powers
p of
u and
, the identities
and
will be useful in what follows. As before, each size-
averaging interval begins at the lower boundary
of the removed or inserted interval and
refers to the complement of that interval on the ODT domain.
Evaluation of
using Equations (
9) and (
10) gives
In accordance with the relation
, this change is attributed to the time-advancement step
. For simplicity, Equation (
11) is specialized to vanishing
, so
. Noting that
converges to
in this limit, the leading-order result
is obtained.
In the conventional decomposition of
,
and
in the present reduced notation. In Equation (
8), a difference of
values separated in time by
is analyzed, so the conventional terms are multiplied by
, which will lead to cancellation of
based on
. Additionally, each spatial derivative is replaced by
times a difference between the CV in which the
is analyzed and the CV to its left, whose velocity profile has been denoted
. Finally
D is changed to
W owing to the specialization to
.
On this basis,
and
are obtained, giving
In Equation (
8), with
omitted, substitution of results for the terms that have been evaluated gives
Rewriting this as
each term is the product of a discretized derivative of filtered
u velocity and a flux-type factor involving only filtered fields. This result is compared to the conventional expressions
and
, where the spatial discretization reflects the evaluation of the Reynolds stresses as domain averages rather than point values at domain endpoints. This gives
. Using Equations (
6) and (
7) to evaluate the Reynolds stresses,
is obtained.
Equation (
17) reproduces the discretized derivative terms in Equation (
18). To fully reproduce Equation (
18),
must be replaced by
where
appears in each of the terms multiplying a discretized derivative. This is equivalent to adding
to each of these occurrences of
. In the limit of vanishing
W, cell-to-cell variation becomes asymptotically small such that
is asymptotically small relative to
, hence negligible. This shows that the difference between Equations (
17) and (
18) an order-of-accuracy discretization effect rather than a difference in the physics that is represented, thereby demontrating the physical correspondence between the subgrid stress associated with splicing and the subgrid stress inferred from the conventional LES formalism.
The term
in Equation (
16) is of divergence form (first difference of a function of a filtered quantity), identifying it as the subgrid transport term
. Hence, the remaider of Equation (
16) corresponds to the conversion term
. This completes the evaluation of the terms of the
budget.
The use of closure models that resolve the processes governing
evolution eliminates the need for modeled equations for
that are otherwise used for closure in various LES formulations [
14]. Within the AME framework, the evaluation of
budget terms is for diagnostic purposes rather than for LES closure and serves to highlight the correspondence to the conventional LES formalism. Additionally,
budget diagnosis of AME simulation results potentially can aid in the formulation of modeled SGS equations for conventional LES, which are often elaborate, involving multiple equations [
14]. This is an example of the potential use of AME to improve more economical LES formulations.
Moreover, the formal analysis of Reynolds stresses is directly involved in AME numerical implementation. In
Appendix B, the Reynolds stresses given by Equations (
6) and (
7) are needed inputs to the evaluation of eddy viscosities in the equation solved by the pressure projection.
4. Extension to Wall-Bounded Flow
The formulation thus far addresses bulk-flow closure. Wall boundary layers require special treatment, in accordance with previous ODT near-wall treatments. Previous applications of ODT to wall boundary layers include multiphysics cases [
15,
16,
17], and ODT has been implemented as a near-wall SGS closure in LES of channel flow [
10,
18]. That formulation is potentially suitable for near-wall closure within the present framework, but it involves under-resolved time advancement, so in keeping with AME concept, an alternative procedure is outlined.
A CV in a cuboidal flow domain has as many as three faces that are adjacent to walls. Such a CV is assigned as many ODT domains as the number of such faces, where each domain is associated with one of those faces and is deemed to be normal to that face. The domains associated with a given CV are treated as independent during ODT time advancement. As in [
10], each domain is attached at one of its endpoints to its associated face and ODT advancement within the domain is subject to the boundary condition at that endpoint, while a no-flux boundary condition is applied at the other endpoint.
Consider splicing for the case in which each CV involved in this operation has one face adjacent to a wall. Each of the associated ODT domains has only one free endpoint available for splicing, so this becomes both the inflow and outflow point. All assigned outflows emanate sequentially from that endpoint, after which all assigned inflows are attached sequentially at that endpoint.
A limitation of this procedure is that there is no direct flow from the innermost sub-layer in a wall-bounded ODT domain to its downstream neighbor. However, there is an indirect communication path, as follows. Wall-normal turbulent transport in the ODT domain associated with the upstream CV can advect near-wall fluid close enough to the outflow endpoint of the ODT domain so that it can be spliced to the ODT domain in the downstream CV, followed by wall-normal turbulent transport down to the near-wall region of that ODT domain. Owing to the slowness of near-wall flow, this is the dominant mechanism of streamwise transport of near-wall fluid over large streamwise distances, but not necessarily between adjacent CVs. These assertions are supported by quasi-steady-quasi-homogeneous theory and its validations [
19], which indicate that small-scale near-wall motions (resolved by ODT in AME) depend primarily on the larger-scale local flow state (controlled by splicing in AME).
In contrast, the method in [
10,
18] includes Eulerian implementation of direct advective transport, at each height above the wall, between parallel ODT domains in neighboring wall CVs. This is under-resolved time advancement of advection, hence outside the scope of the AME concept, but its adoption could be advantageous, depending on the application.
The treatment of CVs for which faces are adjacent to the wall is based on the interpretation of the f associated ODT domains as f instances of the representative state within the CV. Then the average over all f domains is deemed to be the average state of the CV, e.g., for the purpose of evaluating . Likewise the adjustment based on the pressure projection is applied to all f domains, so the individual domains will have different filtered velocities.
For splicing in a block-cuboidal domain with cubic meshing, the possible pairs of f values in the donor and receiver CVs are , , , , , , , , , and . Tetrahedral edge and corner CVs in an unstructured mesh allow the additional possibilities , , , , , and but exclude some of the cubic-mesh pairings. Further, for , splicing involving a pair of ODT domains within a given CV is possible. Specification of physically consistent splicing protocols for the various cases is straightforward but tedious and will be addressed as such cases arise in future applications.
7. Details of the Splicing Procedure
7.1. Enforcement of Consistent Volume Transfers
In this section, it is convenient to refer to ODT SGS closure of LES, but references to LES likewise apply to the coarse-grained fields in AME. The unclosed LES property fields that SGS ODT is intended to close are intensive properties. For this purpose, each ODT domain serves as a representative sample of flow states that can be averaged in order to obtain closure in the associated CV. This allows freedom to set the ODT domain length so that ODT provides a sufficient statistical sample of flow states for closure purposes, subject to other requirements. The relevant considerations are examined with reference to a cubic LES mesh and then generalized to an arbitrary unstructured mesh.
During an advancement step corresponding to a time increment , the volume transfer across an LES CV face is , where is the face-normal velocity and is the face area. In order to accommodate such LES-level transfers on a consistent volumetric basis, each ODT domain is assigned a nominal volume that is equal to the volume V of the associated CV, where D is the domain length and is a nominal cross-sectional area, hence . To accommodate the LES-prescribed rate of volume inflow on the ODT domain, the nominal splicing-induced flow velocity along the ODT domain must be . The corresponding residence time of fluid on the ODT domain is .
For the example in
Section 2.2.1, the fluid residence time in a CV is
. The cubic-mesh relations
and
reduce the ODT residence-time result
to the same expression, showing that the proposed volumetric interpretation of the ODT domain is consistent in this regard.
Expressing this another way, the LES face velocity implies a displacement of a fluid element of length across the face in time , but for , the corresponding length of the spliced ODT interval is . Although the volumetric picture involving and is useful for motivating this splicing-length rule, numerical implementation requires only the application of this rule. In this regard, serves no purpose other than helping to motivate this rule and therefore has no physical significance nor does it have any role in model implementation.
As noted,
may be desired based on sample-size considerations. Sample-size requirements related to the ODT representation of backscatter are discussed in
Section 7.3. An ODT SGS closure of LES of clouds provided indications that
produced insufficient sampling [
30]. That formulation did not involve splicing, but
was found to be sufficient in a cloud LES study using LEM SGS closure with splicing [
29]. Both formulations involved dynamically active feedback of SGS moist thermodynamics to LES-resolved scales. ODTLES applications without such feedback did not indicate sample-size insufficiency, but the numerically dissipative domain coupling in ODTLES could have contributed to the suppression of fluctuations. These disparate observations do not point to any firm conclusions other than to say that the sample-size requirement might depend on both the application case and details of the model formulation.
Another consideration with regard to the domain size is that ODT eddy events should span a size range such that the combination of splicing and ODT eddy events captures the full spectral range of turbulent eddy motions, with neither double-counting nor gaps, as explained in
Section 6.3. For a different form of ODT SGS closure, it was found that eddy events extending to size
were required for this purpose [
11]. This is qualitatively reasonable because the typical displacement of a fluid element by a triplet map is less than half the map size.
For variable-density and other variable-property flows, another advantage of
is that it allows a significant interval of the domain starting from the inlet endpoint to be omitted from both filtering and the gathering of output data. This would reduce the impact of splicing-induced property discontinuities introduced near the inlet on the overall flow evolution. (Molecular transport mollifies these discontinuities before they are advected far from their points of origination.) For velocity profiles, the procedure for removing discontinuities is stated in
Section 2.2.3 to involve kernels applied to the interval
, but more generally they should be applied to
, which includes the case
assumed in that discussion.
Irrespective of the presence or absence of splicing-induced discontinuities, there is another potential artifact near both the inlet and outlet endpoints of the ODT domain. The no-flux boundary conditions applied at those endpoints (see
Section 2.1) result in suppression of eddy-induced transport that might have occurred near those locations if the domain were instead unbounded, in effect creating a numerical boundary layer at each endpoint. Each occurrence of splicing refreshes these peripheral zones so the artifact might not be consequential. If it is nevertheless significant in some cases, then omitting regions near both endpoints from filtering and data gathering could be beneficial, subject to consideration of any conservation violations that might result from this.
In the general case of an unstructured mesh, CVs might have different volumes V and CV faces might have different areas , so the volumetric picture is generalized accordingly. Subject to the considerations that have been noted, any choices of the domain lengths D of individual ODT domains based on user-specified criteria are allowed, so in general these domains will have different nominal cross-sections . Consider a volume transfer from CV 1 to CV 2 across a face of cross-section , corresponding to a face-normal fluid-element displacement . This implies splicing of an ODT interval of length out of CV 1, but volume preservation implies that it arrives in CV 2 with length . Thus for , the length of the spliced interval must be rescaled by the factor in order to preserve volume.
Because this rescaling is a volume-preserving change of the shape of the spliced interval, the resulting stretching or shrinking of the length of individual fluid elements does not imply any density changes. This rescaling modifies the length scales of flow structures represented by ODT property profiles, and hence is a model artifact. Provided that is neither very large nor very small, the artifact is not necessarily severe because it is akin to the physically based triplet-map-induced rescalings of intervals of the ODT domain. It can be avoided by assigning a fixed ratio , hence fixed , to all CVs, but this might not be the optimal choice based on other considerations.
For dilatational flows the situation requires further explanation because the D value changes during the ODT advancement within each time-advancement cycle. This is a operator-splitting effect resulting from the fact that fluid-element density changes are accommodated during ODT advancement by varying the domain length. This is rectified during the pressure-projection step, which assigns CV face velocities so as to produce a net volume transfer into or out of a CV that is equal and opposite to the net volume change implied by the ODT advancement. The indicated adjustments involving the possibly CV-specific and values remain valid, here assuming that splicing restores the D value corresponding to the CV volume.
If ODT were used as an SGS closure of unclosed terms in an LES rather than within the AME framework, then the LES advancement might produce CV face velocities that do not precisely restore the prior D values of all ODT domains. This can be rectified by rescaling ODT domain lengths as needed to enforce the desired domain lengths and then using the relation to update . The adjustment should be small if there is reasonable consistency between ODT and LES advancement.
7.2. Ordering of Fluid Transfers
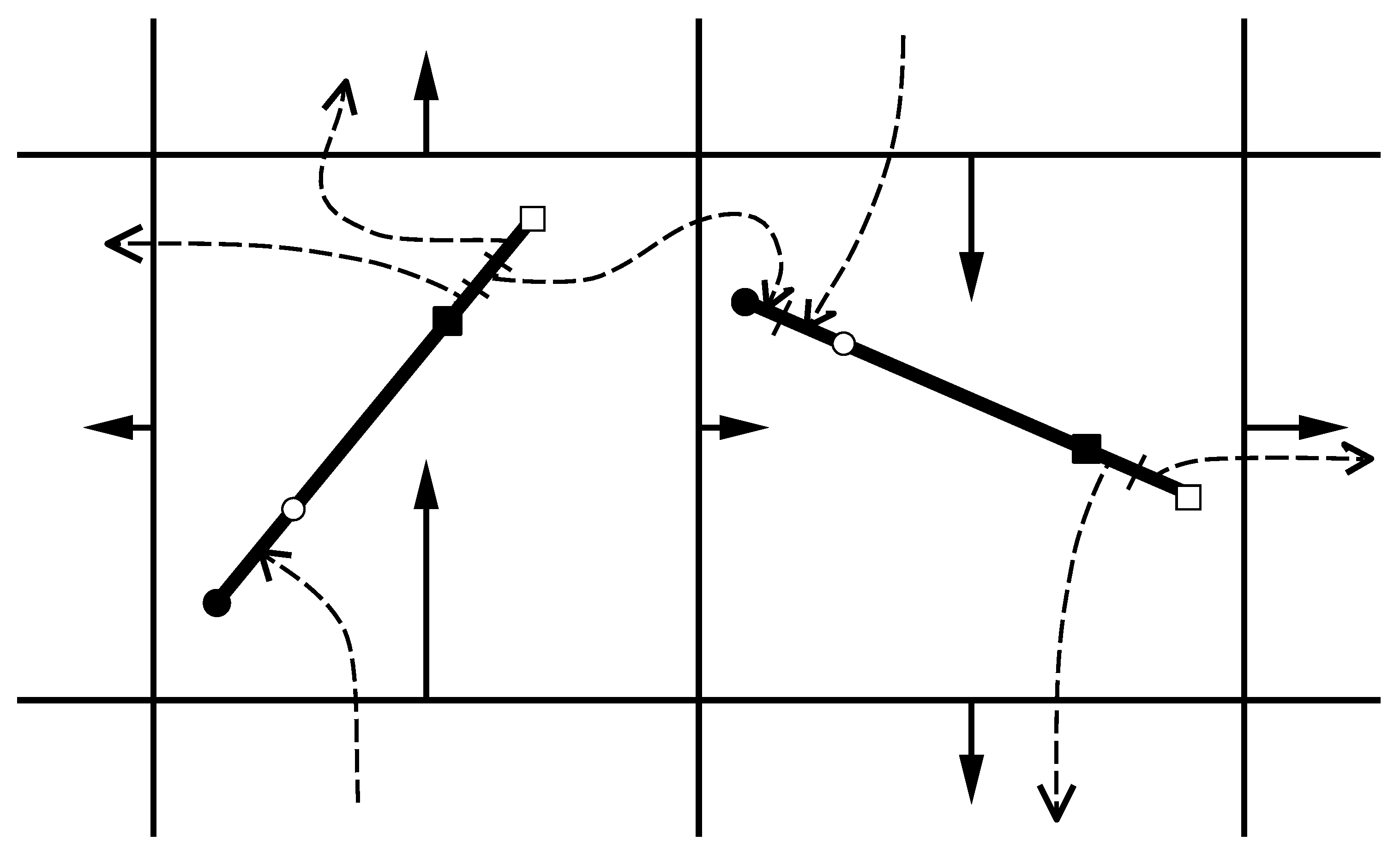
During each time-advancement cycle, a segment of an ODT domain is transferred across each CV face. For a CV with
f faces, this involves some number
of inbound transfers and
outbound transfers. (For non-dilatational flow,
i cannot be 0 or
f because these values would imply a change of the CV volume.)
Figure 2 illustrates a portion of a notional 2D flow domain with Cartesian meshing and hence
, with
on the left side and
on the right side.
For
, the order in which inbound segments are attached to the ODT domain must specified. As in [
36], residence-time considerations are invoked to address this. Suppose
, corresponding to two inbound segments, whose volumes are denoted
and
, with
. If segment 2 is attached first, followed by segment 1, then segment 2 is immediately positioned a relatively substantial fraction of the distance from the inflow to the outflow endpoint of the domain, shortening its residence time prior to its eventual expulsion of its contents. Although the choice of ordering does not affect the mean residence time of fluid in the CV, the ordering 2 followed by 1 will tend to broaden the residence-time distribution relative to the choice 1 followed by 2. In the absence of evidence to the contrary, the default procedure should be to keep the residence-time distribution as narrow as possible. Accordingly, the attachments should be performed in decreasing order of segment volumes.
Now consider two outbound transfers requiring volumes . Based on the same consideration, in what order should they be implemented? Detaching a segment of volume first would enable the second transfer to occur from a region relatively close to the inflow endpoint, corresponding to a relatively short residence time of the transferred segment. Therefore, the default ordering for outbound transfers is from smallest to largest segment volumes, where this choice is subject to comparison of the resulting residence-time distribution to any available empirical evidence.
7.3. SGS Contribution to Face Velocities
As noted in
Section 3, conventional LES closures involve some implicit or explicit modeling of
. This enables estimation of a subgrid velocity fluctuation
that has been used to model backscatter by adding random increments of this order of magnitude to the filtered face velocities
[
14].
This raises the conceptual question of whether ODT SGS closure requires some analog of this additional procedure in order to model backscatter. This question has physical implications with regard to the choice of the ODT domain size, which affects the statistical variability of filtered quantities as noted in
Section 7.1. In the limit of infinite ODT domain size, filtered ODT property profiles converge to ensemble-average values of the filtered properties. Then in this limit, the filtered properties have the same meaning as in conventional LES, so as in LES, additional modeling would be needed in order to capture backscatter. The choice of a finite ODT domain size, which is a practical necessity, introduces finite-sample variability that can be viewed as either an error source relative to conventional LES or as a supplement to conventional LES in that it provides a model representation of backscatter as an inherent attribute of ODT.
Like any other model feature, the validity and fidelity of this backscatter representation depends on the physical realism of ODT flow advancement, but it also requires an objective basis for choosing the ODT domain size so as to obtain the physically correct degree of finite-sample variability. Backscatter modeling in conventional LES provides guidance in this regard. Because is a diagnosed property of the ODT state, can be evaluated. Then the ODT analog of conventional backscatter modeling is obtained when the domain size is chosen so that the finite-sample variability of values obtained for given flow conditions is of order as determined from the ODT results. Relatively large ODT domains might be needed for multiphysics cases, e.g., with reaction-driven thermal expansion, owing to the intensity and sporadic occurrences of the associated backscatter effects. Based on the identified self-consistent choice of domain size, the resulting finite-sample variability of would be imprinted on the face velocities by the pressure projection. (This happens whether or not the procedure is optimized as described.)
In
Section 2.3, the importance of generating realistic fluid-parcel trajectories through the flow domain was noted. This depends upon both the evaluation of the CV face velocities
and the splicing protocol. For a splicing-based LEM closure of LES that lacked the SGS flow information provided by ODT, a particle-tracking approach involving an autocorrelated stochastic velocity contribution modeled SGS fluctuation effects on the splicing-induced fluid-parcel trajectories [
29]. This improved the model representation of turbulent dispersion. With ODT closure, it is possible that
fluctuations induced by ODT statistical variability will adequately capture this effect.
8. Discussion
LEM and ODT have been used in various ways for SGS closure of LES, such as for chemistry closure of reacting flow simulations, for near-wall momentum closure, and in ODTLES, which involves direction-dependent hybridization of resolved and coarse-grained momentum advancement. The present formulation is based on the viewpoint, within the low-Mach-number framework, that a broad range of turbulence phenomenology and associated microphysics can be well represented by modeling momentum advancement on a fully resolved basis, using only the coarse-grained pressure-projection step to capture global effects. The absence of time stepping of coarse-grained momentum or scalar transport equations motivates the description of the approach as autonomous microstructure evolution (AME).
As in LEM chemistry closures, one ODT domain is associated with each coarse-grained control volume. Relative to that and other previous formulations, AME includes the following novel features:
The distribution of the available kinetic energy among velocity components during the kernel operation is consistently formulated for the general case of arbitrary external energy and momentum sources and sinks.
Alignment of the orientation of each ODT domain with the evolving coarse-grained flow is enforced. Nevertheless, velocity components are defined in the fixed coordinate system of the physical domain.
As in LEM SGS closure, the splicing operation that implements fluid transfers between ODT domains is governed by the coarse-grained velocity field but the transferred parcels maintain full spatial resolution of property profiles. A novel feature is the subsequent adjustment of velocity profiles that eliminates splicing-induced discontinuities subject to the applicable conservation constraints.
A volumetric interpretation of splicing-induced fluid transfer provides flexibility with regard to the choice of ODT domain lengths while maintaining physically consistent fluid residence times on the ODT domains, and it straightforwardly generalizes to an unstructured mesh.
A fine-grained interpretation of the splicing operation enables a physically consistent formulation of the Reynolds shear stress, enabling a prescription for diagnosing the terms of the SGS turbulent-kinetic-energy budget.
The freedom to assign the ODT domain length, in combination with the availability of SGS TKE statistics, offers the possibility of a self-consistent quantitative approach to the representation of backscatter.
A splicing protocol specialized to ODT domains attached to a wall at one endpoint incorporates the dominant fluid-transfer mechanism in boundary layers.
For variable-density flow, the projection of the coarse-grained pressure gradient onto the ODT domain orientation identifies the bulk acceleration of the domain. On this basis, the Rayleigh–Taylor instability mechanism is embedded in the eddy selection and implementation procedures.
For buoyant stratified flow in the Boussinesq approximation, a synthesis of standalone ODT formulations for horizontal and vertical domains respectively yields a formulation that is applicable for arbitrary domain orientation.
These features and the framework that encompasses them, embodied in the time-advancement cycle outlined in
Section 2.3, offer the prospect of improved cost-performance characteristics relative to conventional LES and existing LEM and ODT closure formulations. This will be elaborated in sequels to the present contribution.
The adjustment of velocity profiles to eliminate splicing-induced discontinuities avoids a potential artifact, but it has been noted that this remedy is not applicable to density and other advected scalar fields. The alternative remedy of using long domains and excluding a limited neighborhood of the inlet endpoint from filtering operations applied to these property fields has been proposed. In this regard, several points are relevant. First, this artifact does not arise in constant-density flow or in buoyant stratified flow in the Boussinesq approximation, allowing a wide scope of AME application that is not subject to this artifact. Second, LEM SGS closure of mixing and chemical reactions in LES is subject to this artifact, yet its performance is satisfactory for a variety of combustion applications [
2].
Finally there is the mitigation strategy of coarsening the mesh. Regardless of the ODT domain sizes in individual CVs, for a given mesh a fluid element must pass through the same number of CVs in order to traverse the flow and hence is spliced that number of times. A reduction in the number of splicings can only be achieved by coarsening the mesh.
This raises the question of the mesh resolution requirement in AME. AME time advancement is structured to involve only minimal large-scale influence through the pressure-projection operation, where the justification is that ODT is formulated to adequately represent flow phenomenology at all scales below those dominated by case-specific 3D large-scale forcings and constraints such as inflows, outflows, and boundary conditions. Therefore, a coarse very-large-eddy-simulation (VLES) type of mesh is not only viable but is central to the AME concept. The efficacy of coarse meshing has been shown in applications of ODTLES [
11,
12].
Coarse meshing not only mitigates any splicing artifacts but also reduces computational cost. For a flow that would require
DNS CVs, AME with
CVs where
would require order
fully resolved cells per ODT domain for a total of
ODT cells. Assuming that computation time scales with the total number of ODT cells, this corresponds to a cost-reduction factor
relative to DNS. This cost reduction could somewhat or entirely compensate for the cost of ODT relative to other SGS closures, depending on the case. Experience with ODTLES has indicated that the parallel-processing efficiency of SGS ODT results in acceptable turnaround times on high-performance computers [
13].
Apart from the discontinuity artifact, splicing is a numerical form of ‘mesomixing’ (meaning at subgrid scale, but not at the molecular-mixing microscale) in the same sense that the ODT eddy event is a physically based mesomixing operation. This aspect of splicing is analogous to numerical dissipation in LES that can dominate the physical based dissipation if it is not carefully managed. Mesh coarsening reduces the number of times that a fluid element is spliced as it traverses the flow but the number of physical mesomixing events during the traversal, whether modeled as eddy events or resolved on the 3D mesh, is unchanged. Thus, mesh coarsening has the additional advantaged of reducing numerical mesomixing relative to physically based mesomixing, thus enhancing the physical fidelity of the numerical implementation.
High fidelity with VLES-type meshing is plausible for simple flows such as the canonical free-shear flows. In the near-wall regions of boundary layers and confined flows, the demonstrated performance of ODT as a standalone and an SGS near-wall model [
10,
11,
12,
16,
18,
21] provides assurance that the ODT near-wall formulation for AME described in
Section 4 will likewise provide suitable closure on a coarse mesh.
Unsteady boundary layers are subject to local flow separation and re-attachment. Related features such as recirculation zones arise in bulk flow. The compatibility of the present formulation with unstructured meshes provides the flexibility to refine the mesh adaptively so as to increase spatial resolution when and where it is needed. Where the local refinement leaves an insufficient range of subgrid scales to benefit from the multiscale ODT treatment, the splicing protocol can be retained but box filtering can be applied after each splicing operation so as to implement the no-model closure described in
Section 2.2.1.
An approach to adaptive meshing termed the arbitrary Lagrangian Eulerian (ALE) method [
37] employs operator splitting consisting of Lagrangian implementation of advection and Eulerian implementation of molecular transport. The mesh adaption advects CV faces, involving no property fluxes across faces. This overcomes the advective CFL time-step limitation although there remains a weaker time-step bound that prevents topologically forbidden mesh structures and related anomalies. After mesh adaption, the flow state is mapped onto an improved mesh structure, causing redistribution of fluid volumes among CVs. This implements the physically prescribed molecular-transport fluxes across CV faces.
In AME with ALE meshing, splicing is decomposed into two operations. First, the ODT domains are displaced in accordance with the advection of the CVs containing them. Second, the mesh remapping prescribes transfers of domain segments across CV faces. This implementation reduces both splicing frequency and volume fluxes per splicing occurrence, thus mitigating numerical artifacts as in conventional ALE.
SGS ODT within the AME framework has been emphasized because this is convenient for explaining the closure approach without reference to the particulars of LES implementation. Addressing SGS ODT within an LES framework in full detail requires consideration of the interactions between the numerical and physical modeling implementations in a particular LES code, which is beyond the present scope. Nevertheless it is pertinent to note that a basic requirement for closure of LES (and likewise AME, as shown in
Appendix B) is evaluation of the filtered Reynolds stresses. In
Section 3 a formalism for their evaluation based on analysis of the SGS TKE budget is developed and is shown to be broadly consistent with the Navier–Stokes equation-based LES formalism.
Another potential application of ODT SGS closure is motivated by LEM chemistry closure of LES [
2]. The LES provides LEM with CV face velocities that govern splicing and a parametric representation of SGS turbulence that controls LEM SGS advection. The only LEM input to LES flow advancement is the filtered divergence, deduced from volume creation caused by thermal expansion, that is used to solve the coarse-grained pressure Poisson equation. ODT could be used in this formulation instead of LEM. ODT would receive additional input from the LES in the form of pressure-gradient forcing of the ODT momentum equation, but would provide the same output as LEM to the LES flow advancement. The ODT filtered flow field would then be at best roughly consistent with the LES flow field, but this should be sufficient for the intended chemistry closure. The potential benefit of the use of ODT instead of LEM is relaxation of the restriction to standard inertial-range similarity scalings, instead allowing dynamical effects such as SGS baroclinic vorticity, the Darrieus–Landau instability, and the kinematical effects of thermally induced viscosity fluctuations to be captured. Importantly, this substitution is not simply a matter of replacing LEM by ODT in existing formulations. As explained in
Section 2.2.3, it also requires the application of a specialized splicing protocol to ODT velocity profiles.
The present restriction of AME to low-Mach-number flow is a consequence of the exclusion of coarse-grained momentum advancement. The relaxation of this restriction by extending the scope of ODT SGS implementation to LES closure leads to consideration of closure of compressible LES formulations using low-Mach-number ODT as described here or its extension to compressible flow [
32]. In applications to supersonic inert mixing [
38] and to detonation phenomena [
39,
40], LEM has been used for subgrid mixing/reaction closure in which high-speed effects are communicated by the LES thermodynamic inputs to LEM. This is a suitable strategy for some purposes, but ODT SGS closure, especially if compressible, would extend the scope of application of LES to high-speed flows. The dynamically based ODT representation of SGS kinetic energy (
Section 3) would be a pertinent input to the LES energy equation.
Thus, the novel flow-advancement features that have been described have potential benefits beyond AME
per se. Similarly, AME can be supplemented by coarse-grained advancement in particular situations in which it is advantageous, as illustrated by a previous approach to ODT-based near-wall closure that is mentioned in
Section 4. Another example, noted in
Section 5.1, is buoyant stratified flow at geophysical scales, for which SGS ODT can serve as a scale-range extension relative to conventional closures, but cannot affordably resolve the physical microscales and accordingly requires its own SGS closure. Although coarse-grained in this sense, this formulation preserves the defining AME feature that there is no time advancement of a momentum equation on the filtered 3D mesh.
Details of the numerical implementation of AME will be presented in a future publication, accompanied by applications to canonical flows for demonstration and validation purposes. The relative performance of alternative strategies for model formulation or numerical implementation that have been noted will be evaluated, involving tradeoffs with regard to physical soundness, numerical accuracy, and computational cost. For clarity of interpretation, the initial test cases will be simple and in some instances within the scope of the capabilities of conventional LES, ODTLES, or standalone ODT. These steps are targeted on the principal goal of capturing the configuration-specific coupled dynamics of microphysical processes and high-intensity turbulence that are difficult to investigate using presently available methods.



{kind=link}
{kind=link}

