
Adaptive Data-Driven Model Order Reduction for Unsteady Aerodynamics



Abstract
:1. Introduction
2. Mathematical Formulation of the Adaptive ROM Framework for Multi-Query Problems
3. Implementation of Adaptive ROM
- (1)
- Generation of the dataset , where indicates the entire set of conservative variables;
- (2)
- Construction of R low-dimensional models, where R is defined by the user on the basis of the ROM algorithms available, and computation of their reconstruction on a specified time grid, , with the specified time grid;
- (3)
- Error estimation for each method on the specified time grid through the residual . Each method will have, at each time instance of the time grid used, a set of residuals corresponding to the set of conservative variables of the problem at hand.
- (1)
- Using as inputs the residual database and the desired time instant of the many-query problem, selecting the best low-dimensional model for each conservative variable in ;
- (2)
- Computing the reconstruction for each conservative variable in , using a formula based on the method selected.
| Algorithm 1: Adaptive reduced order modelling framework. |
 |
Basis Identification and Flow Reconstruction
4. Residual-Based Error Estimation
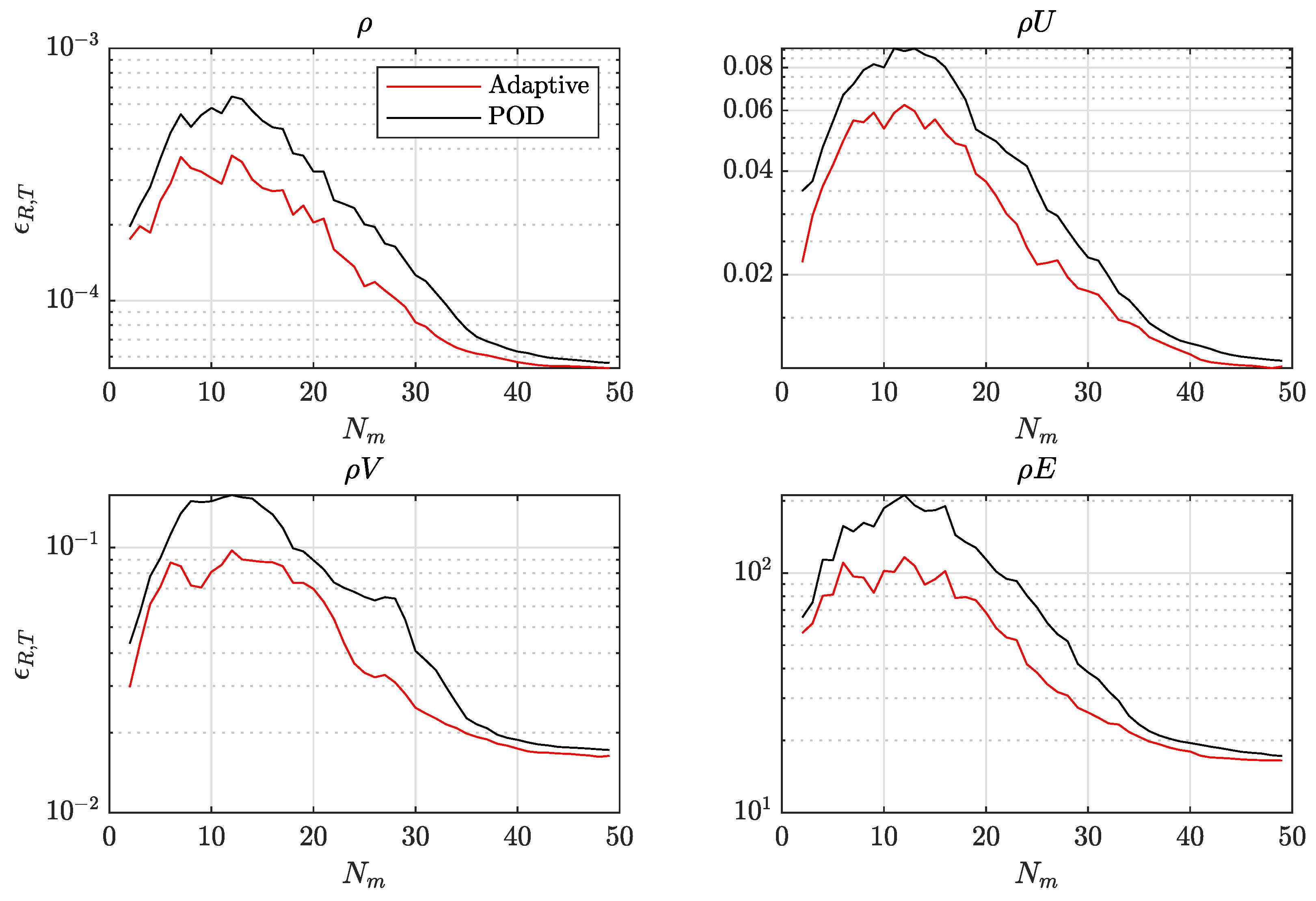
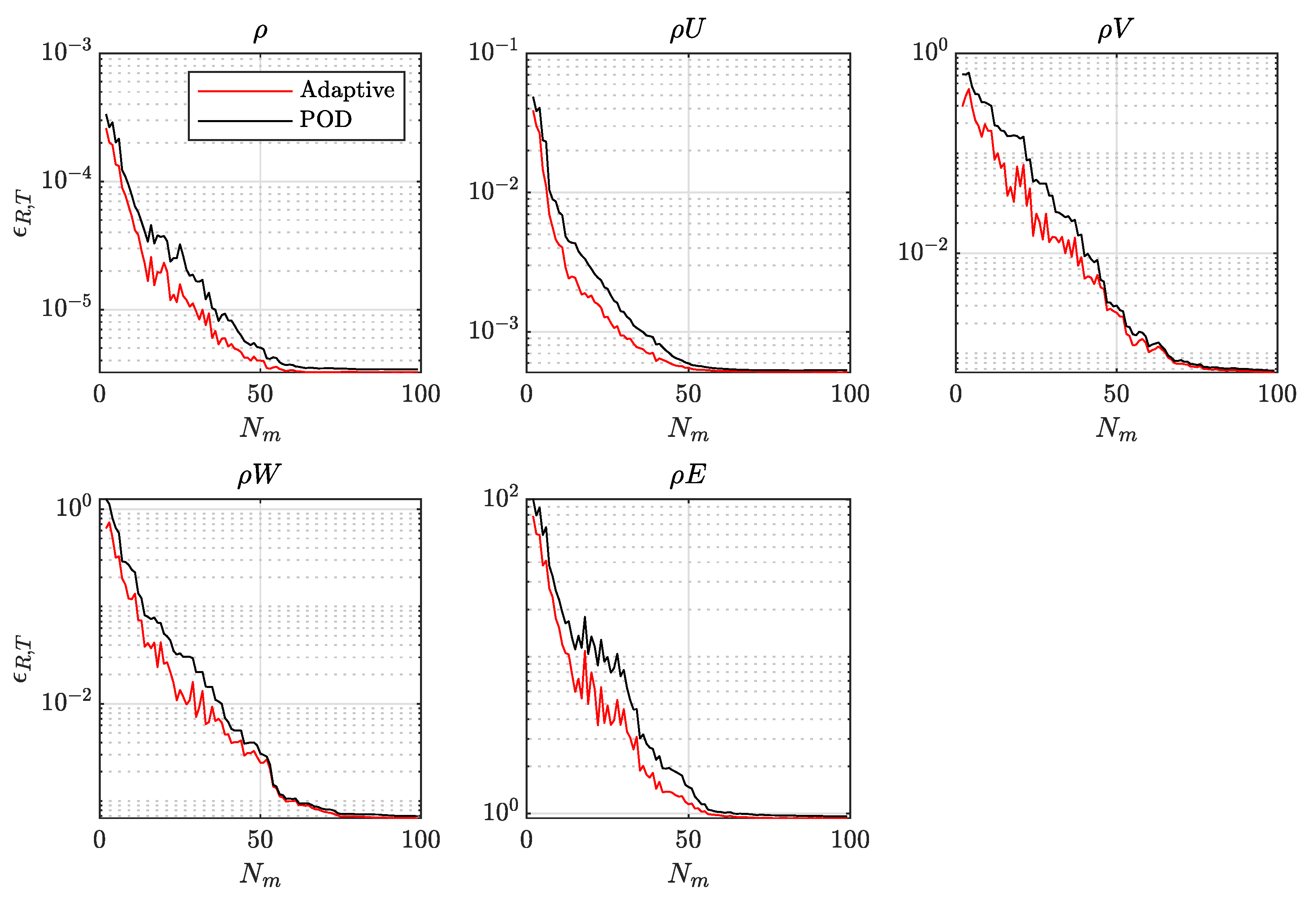
5. Sensitivity with Respect to the Number of Modes
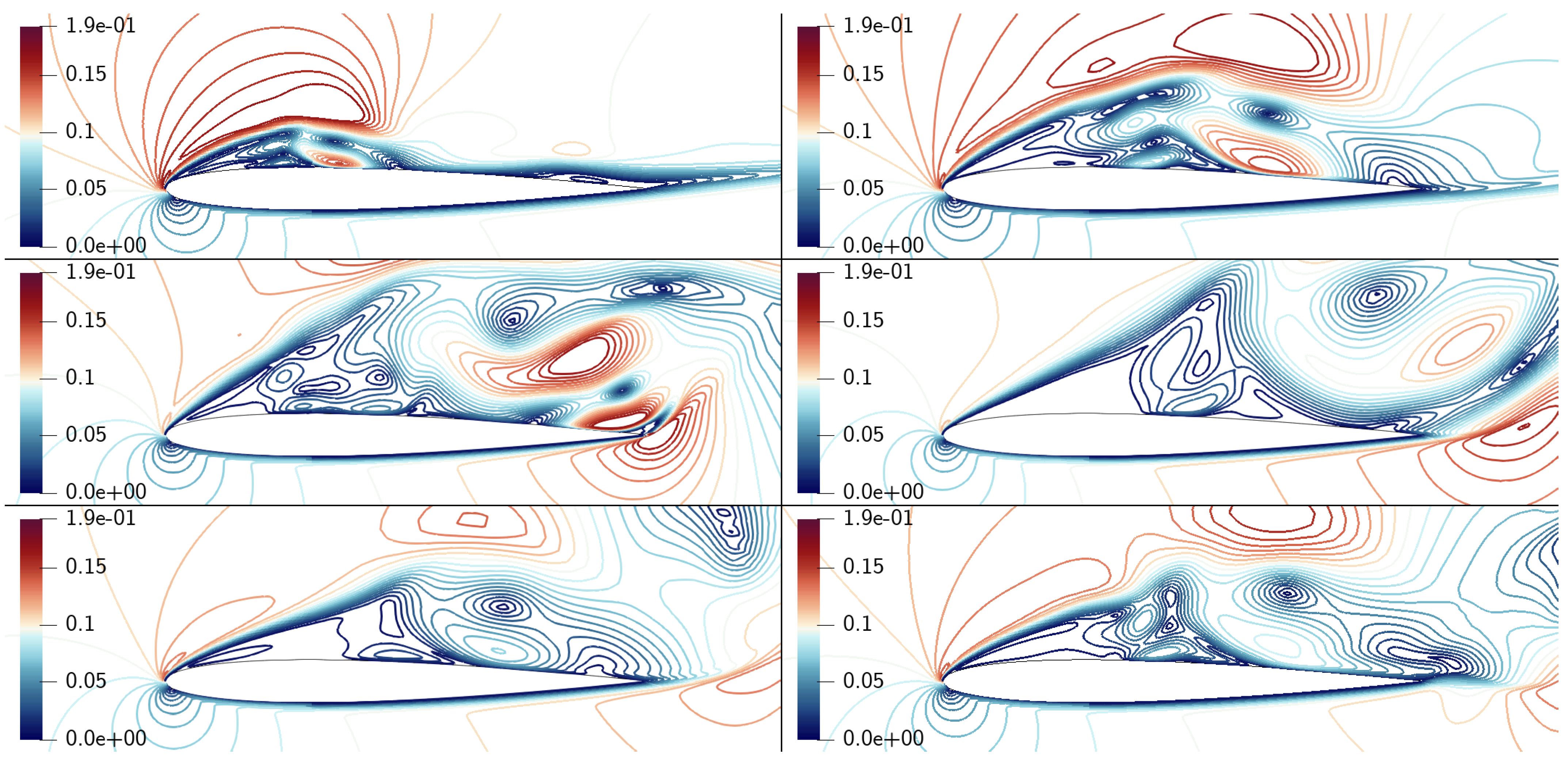
5.1. Impulsive Start of a NACA0009 Airfoil
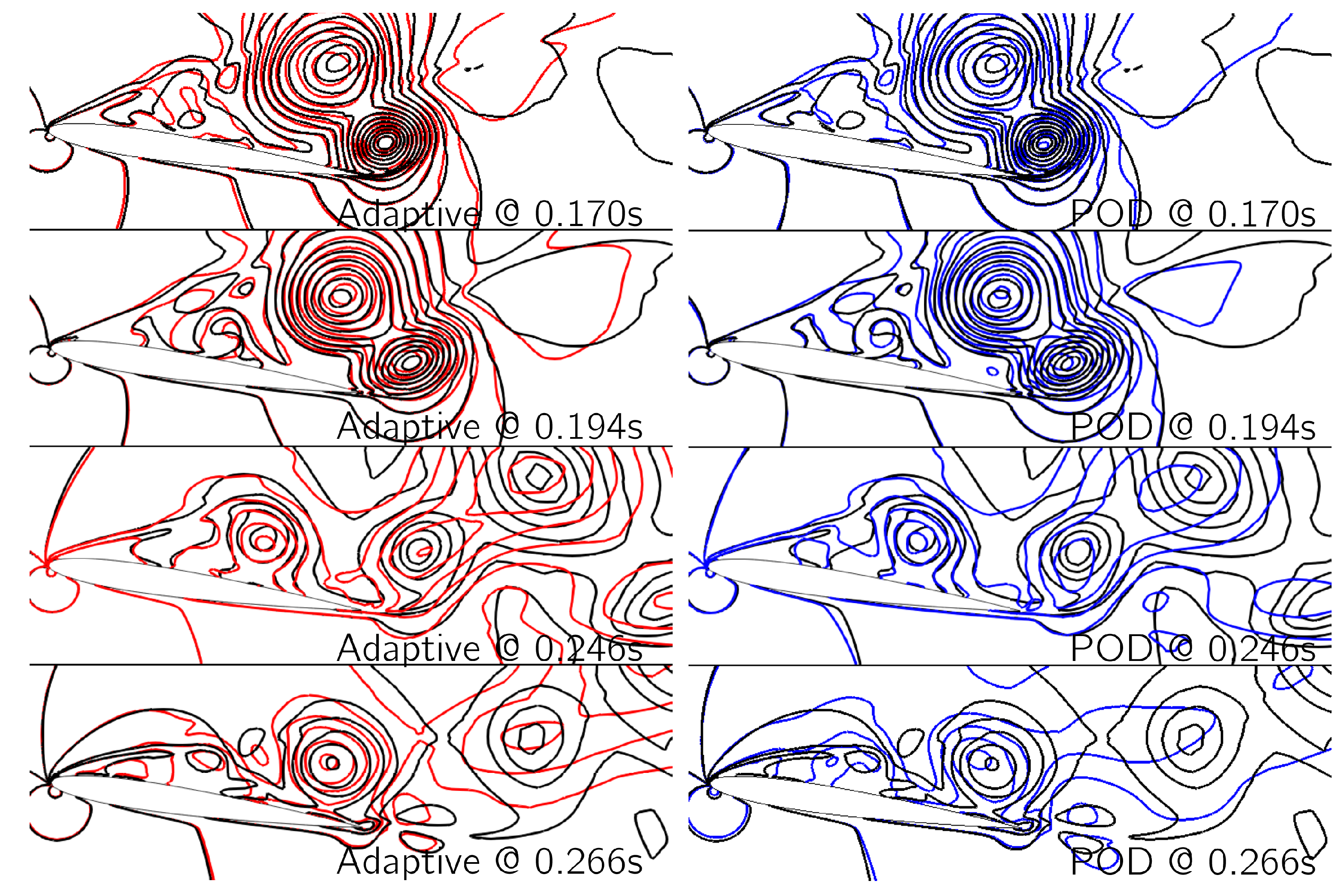
5.2. Impulsive Start of a 30P30N Multi-Element Airfoil
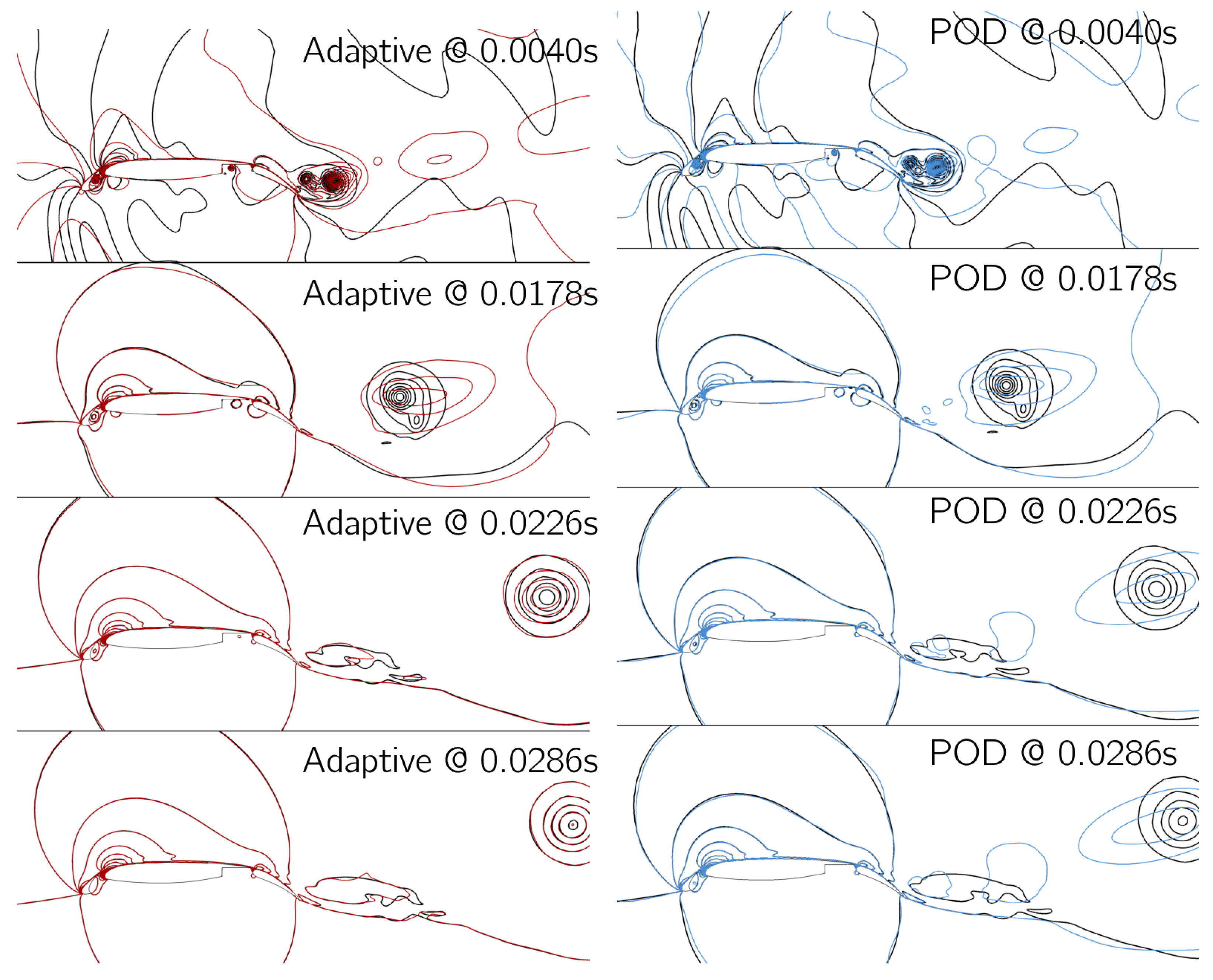
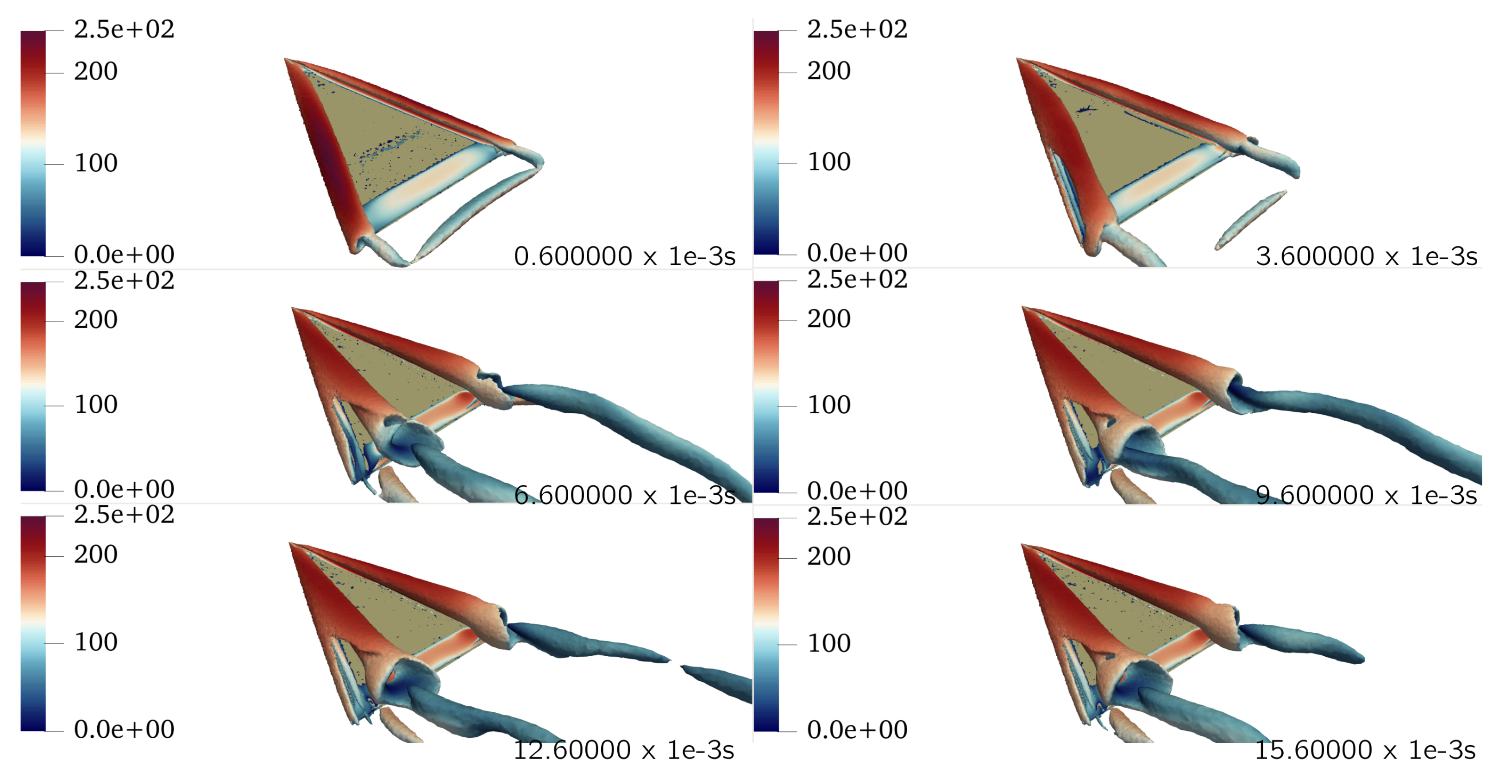
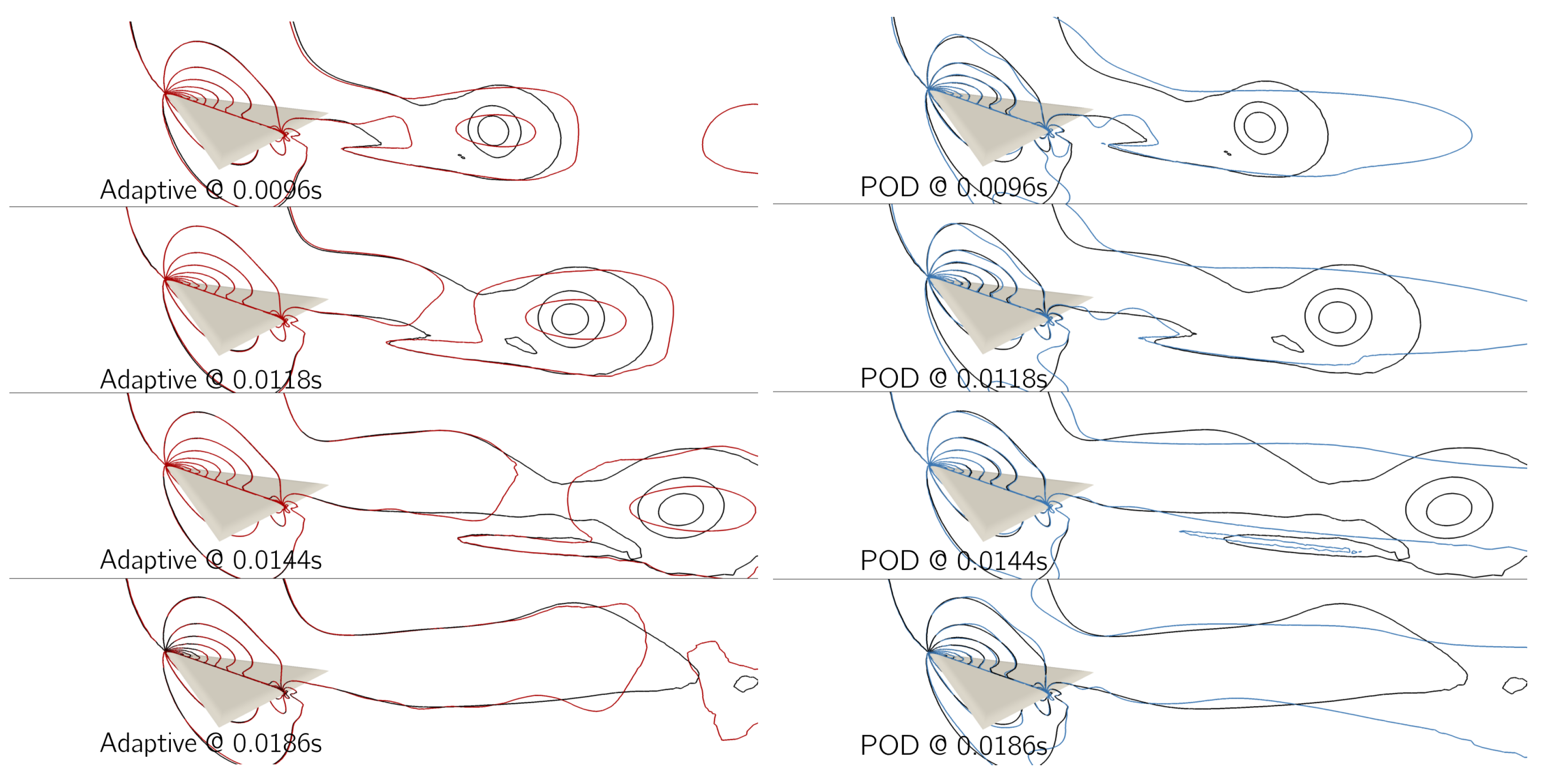
6. Unsteady Dynamics of Vortices Past a Delta Wing
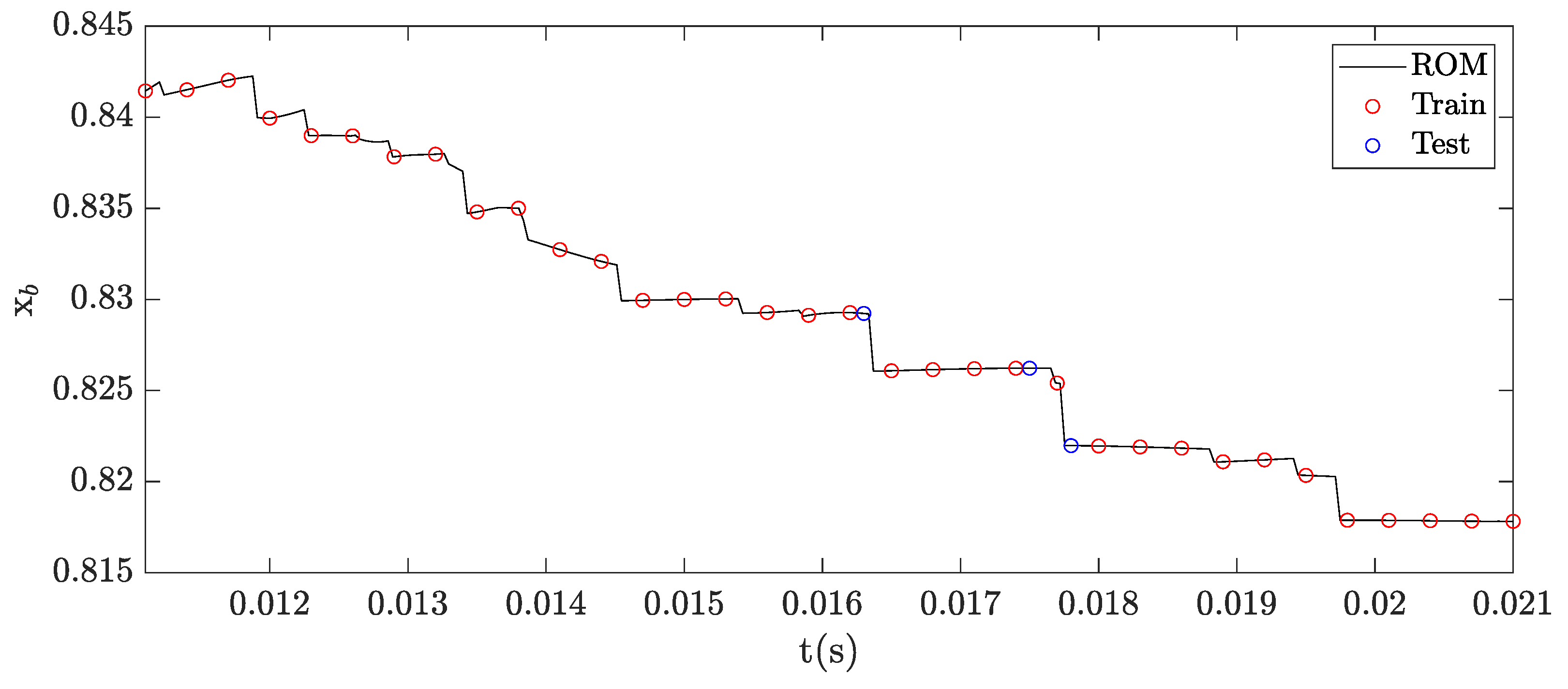
Analysis of the Vortex Breakdown over a Delta Wing
- (1)
- Computation of the velocity vector from the reconstructed conserved quantities;
- (2)
- Extraction of vortex core lines from the velocity volume solution;
- (3)
- Identification of the streamwise coordinate where the vortex core line associated with the main leading edge vortex is interrupted.
7. Vortex Dynamics for Delta Wings in a Formation Flight
8. Conclusions
- -
- The residual error metric represents a relevant measure to use in order to build the adaptive ROM, since it has shown enough consistency in terms of providing the best accuracy of the final flow field reconstructions among the methods available in the framework;
- -
- A significant reduction of the problem () can be achieved through the adaptive framework, while retaining good consistency and accuracy with the physics of unsteady vortex-dominated flows. In particular, it was shown that, using a small subset of the entire set of modes that can in principle be extracted from the original snapshots, the adaptive ROM is capable of providing major improvements with respect to a single ROM based on the classical POD method. Indeed, the truncation procedure, i.e., the number of modes finally retained, which is the fundamental step to promote dimensionality reduction, is the main aspect responsible in POD for the lack of dynamic information, as the energy ranking might hide the dynamics of some low-energy spatial structures. The more detailed description of the flow field provided by the adaptive ROM is believed to be an advantage for problems that require more refined solutions, e.g., flow control and design problems;
- -
- The adaptive ROM is able to enrich the time dynamics. It was shown, indeed, how the model is able to provide a CFD-like description of the vortex breakdown displacement for the delta wing test case also outside of the training points.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bui-Thanh, T.; Damodaran, M.; Willcox, K. Proper Orthogonal Decomposition extensions for parametric applications in compressible aerodynamics. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, USA, 23–26 June 2003; p. 4213. [Google Scholar]
- Iuliano, E.; Quagliarella, D. Proper orthogonal decomposition, surrogate modelling and evolutionary optimization in aerodynamic design. Comput. Fluids 2013, 84, 327–350. [Google Scholar] [CrossRef]
- Lucia, D.J.; Beran, P.S.; Silva, W.A. Reduced-order modelling: New approaches for computational physics. Prog. Aerosp. Sci. 2004, 40, 51–117. [Google Scholar] [CrossRef] [Green Version]
- Lieu, T.; Farhat, C.; Lesoinne, M. POD-based aeroelastic analysis of a complete F-16 configuration: ROM adaptation and demonstration. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; p. 2295. [Google Scholar]
- Quarteroni, A.; Rozza, G. Reduced Order Methods for Modelling and Computational Reduction; Springer: Berlin/Heidelberg, Germany, 2014; Volume 9. [Google Scholar]
- Holmes, P.; Lumley, J.L.; Berkooz, G.; Rowley, C.W. Turbulence, Coherent Structures, Dynamical Systems and Symmetry; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Noack, B.R. From snapshots to modal expansions–bridging low residuals and pure frequencies. J. Fluid Mech. 2016, 802, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Schmid, P.J. Dynamic Mode Decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef] [Green Version]
- Sieber, M.; Paschereit, C.O.; Oberleithner, K. Spectral Proper Orthogonal Decomposition. J. Fluid Mech. 2016, 792, 798–828. [Google Scholar] [CrossRef] [Green Version]
- Lumley, J.L. The structure of inhomogeneous turbulence. Atmospheric Turbulence and Radio Wave Propagation; Publishing House Nauka: Moscow, Russia, 1967; pp. 66–178. [Google Scholar]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Luchtenburg, D.; Noack, B.; Schlegel, M. An Introduction to the POD Galerkin Method for Fluid Flows with Analytical Examples and MATLAB Source Codes; Berlin Institute of Technology: Berlin, Germany, 2009. [Google Scholar]
- Stabile, G.; Hijazi, S.; Mola, A.; Lorenzi, S.; Rozza, G. POD-Galerkin reduced order methods for CFD using Finite Volume Discretisation: Vortex shedding around a circular cylinder. Commun. Appl. Ind. Math. 2017, 8, 210–236. [Google Scholar] [CrossRef] [Green Version]
- Lorenzi, S.; Cammi, A.; Luzzi, L.; Rozza, G. POD-Galerkin method for finite volume approximation of Navier–Stokes and RANS equations. Comput. Methods Appl. Mech. Eng. 2016, 311, 151–179. [Google Scholar] [CrossRef]
- Fossati, M.; Habashi, W.G. Multiparameter analysis of aero-icing problems using proper orthogonal decomposition and multidimensional interpolation. AIAA J. 2013, 51, 946–960. [Google Scholar] [CrossRef]
- Buljak, V. Proper orthogonal decomposition and radial basis functions for fast simulations. In Inverse Analyses with Model Reduction; Springer: Berlin/Heidelberg, Germany, 2012; pp. 85–139. [Google Scholar]
- Walton, S.; Hassan, O.; Morgan, K. Reduced order modelling for unsteady fluid flow using proper orthogonal decomposition and radial basis functions. Appl. Math. Model. 2013, 37, 8930–8945. [Google Scholar] [CrossRef]
- Mohan, A.T.; Gaitonde, D.V. A deep learning based approach to reduced order modelling for turbulent flow control using LSTM neural networks. arXiv 2018, arXiv:1804.09269. [Google Scholar]
- Gao, Z.; Liu, Q.; Hesthaven, J.; Wang, B.; Don, W.; Wen, X. Non-intrusive reduced order modelling of convection dominated flows using artificial neural networks with application to Rayleigh-Taylor instability. Commun. Comput. Phys. 2022, 30, 97–123. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, D.; Fang, F.; Govindan, R.; Pain, C.C.; Guo, Y. Model identification of reduced order fluid dynamics systems using deep learning. Int. J. Numer. Methods Fluids 2018, 86, 255–268. [Google Scholar] [CrossRef] [Green Version]
- Hesthaven, J.S.; Ubbiali, S. Non-intrusive reduced order modelling of nonlinear problems using neural networks. J. Comput. Phys. 2018, 363, 55–78. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Lee, H.; Lim, S.; Lin, W.; Lee, K.; Wu, C. Proper Orthogonal Decomposition and its applications—Part I: Theory. J. Sound Vib. 2002, 252, 527–544. [Google Scholar] [CrossRef]
- Rowley, C.W. Model reduction for fluids, using balanced Proper Orthogonal Decomposition. Int. J. Bifurc. Chaos 2005, 15, 997–1013. [Google Scholar] [CrossRef] [Green Version]
- Noack, B.R.; Stankiewicz, W.; Morzyński, M.; Schmid, P.J. Recursive Dynamic Mode Decomposition of transient and post-transient wake flows. J. Fluid Mech. 2016, 809, 843–872. [Google Scholar] [CrossRef] [Green Version]
- Cazemier, W.; Verstappen, R.; Veldman, A. Proper Orthogonal Decomposition and low-dimensional models for driven cavity flows. Phys. Fluids 1998, 10, 1685–1699. [Google Scholar] [CrossRef] [Green Version]
- Kutz, J.N.; Fu, X.; Brunton, S.L. Multi-Resolution Dynamic Mode Decomposition. arXiv 2015, arXiv:math.DS/1506.00564. [Google Scholar]
- Le Clainche, S.; Vega, J. Higher Order Dynamic Mode Decomposition. SIAM J. Appl. Dyn. Syst. 2017, 16, 882–925. [Google Scholar] [CrossRef] [Green Version]
- Pascarella, G.; Kokkinakis, I.; Fossati, M. Analysis of Transition for a Flow in a Channel via Reduced Basis Methods. Fluids 2019, 4, 202. [Google Scholar] [CrossRef] [Green Version]
- Pascarella, G.; Fossati, M.; Barrenechea, G. Adaptive reduced basis method for the reconstruction of unsteady vortex-dominated flows. Comput. Fluids 2019, 190, 382–397. [Google Scholar] [CrossRef]
- Amsallem, D.; Zahr, M.J.; Farhat, C. Nonlinear model order reduction based on local reduced-order bases. Int. J. Numer. Methods Eng. 2012, 92, 891–916. [Google Scholar] [CrossRef]
- Carlberg, K. Adaptive h-refinement for reduced-order models. Int. J. Numer. Methods Eng. 2015, 102, 1192–1210. [Google Scholar] [CrossRef] [Green Version]
- Washabaugh, K.; Amsallem, D.; Zahr, M.; Farhat, C. Nonlinear model reduction for CFD problems using local reduced-order bases. In Proceedings of the 42nd AIAA Fluid Dynamics Conference and Exhibit, New Orleans, LA, USA, 25–28 June 2012; p. 2686. [Google Scholar]
- Viana, F.; Haftka, R.; Steffen, V., Jr. Multiple surrogates: How cross-validation errors can help us to obtain the best predictor. Struct. Multidiscip. Optim. 2009, 39, 439–457. [Google Scholar] [CrossRef]
- Pascarella, G.; Fossati, M. Model-Based Adaptive MOR Framework for Unsteady Flows Around Lifting Bodies. In Model Reduction of Complex Dynamical Systems; Benner, P., Breiten, T., Faßbender, H., Hinze, M., Stykel, T., Zimmermann, R., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 283–305. [Google Scholar] [CrossRef]
- Economon, T.D.; Palacios, F.; Copeland, S.R.; Lukaczyk, T.W.; Alonso, J.J. SU2: An open-source suite for multiphysics simulation and design. AIAA J. 2015, 54, 828–846. [Google Scholar] [CrossRef]
- Sirovich, L. Method of snapshots. Q. Appl. Math. 1987, 45, 561–571. [Google Scholar] [CrossRef] [Green Version]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On Dynamic Mode Decomposition: Theory and applications. arXiv 2013, arXiv:1312.0041. [Google Scholar]
- Jovanović, M.R.; Schmid, P.J.; Nichols, J.W. Sparsity-promoting Dynamic Mode Decomposition. Phys. Fluids 2014, 26, 24103. [Google Scholar] [CrossRef]
- Carr, J.C.; Beatson, R.K.; Cherrie, J.B.; Mitchell, T.J.; Fright, W.R.; McCallum, B.C.; Evans, T.R. Reconstruction and representation of 3D objects with radial basis functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, San Antonio, TX, USA, 23–26 July 2001; pp. 67–76. [Google Scholar]
- Allendes, A.; Barrenechea, G.R.; Rankin, R. Fully computable error estimation of a nonlinear, positivity-preserving discretization of the convection-diffusion-reaction equation. SIAM J. Sci. Comput. 2017, 39, A1903–A1927. [Google Scholar] [CrossRef] [Green Version]
- Chu, J.; Luckring, J.M. Experimental Surface Pressure Data Obtained on 65 Delta Wing across Reynolds Number and Mach Number Ranges; National Aeronautics and Space Administration, Langley Research Center: Hampton, VA, USA, 1996.
- Lin, J.C.; Rockwell, D. Transient structure of vortex breakdown on a delta wing. AIAA J. 1995, 33, 6–12. [Google Scholar] [CrossRef]
- Kumar, A. On the structure of vortex breakdown on a delta wing. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 89–110. [Google Scholar] [CrossRef]
- Roth, M.; Peikert, R. A higher-order method for finding vortex core lines. In Proceedings of the Visualization’98 (Cat. No. 98CB36276), Research Triangle Park, NC, USA, 18–23 October 1998; pp. 143–150. [Google Scholar]
- Peikert, R.; Roth, M. The parallel vectors operator-a vector field visualization primitive. In Proceedings of the Visualization’99 (Cat. No. 99CB37067), San Francisco, CA, USA, 24–29 October 1999; pp. 263–532. [Google Scholar]
- Sujudi, D.; Haimes, R. Identification of swirling flow in 3-D vector fields. In Proceedings of the 12th Computational Fluid Dynamics Conference, San Diego, CA, USA, 19–22 June 1995; p. 1715. [Google Scholar]
- Lee, M.; Ho, C.M. Vortex dynamics of delta wings. In Frontiers in Experimental Fluid Mechanics; Springer: Berlin/Heidelberg, Germany, 1989; pp. 365–427. [Google Scholar]
- Agrawal, S.; Barnett, R.M.; Robinson, B.A. Numerical investigation of vortex breakdown on a delta wing. AIAA J. 1992, 30, 584–591. [Google Scholar] [CrossRef]
- Visbal, M. Computational and physical aspects of vortex breakdown on delta wings. In Proceedings of the 33rd Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 1995; p. 585. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mach | (deg) | Reynolds | (K) | Time (s) | (s) | CFL |
|---|---|---|---|---|---|---|
| 0.1 | 15 | 10,000 | 288.15 | 0.3 | 10−3 | 5 |
| Mach | (deg) | Reynolds | (K) | Time (s) | (s) | CFL |
|---|---|---|---|---|---|---|
| 0.2 | 19 | 300 | 0.03 | 10−4 | 0.4 |
| Mach | (deg) | Reynolds | (K) | Time (s) | (s) | CFL |
|---|---|---|---|---|---|---|
| 0.4 | 23 | 288.0 | 0.021 | 10−4 | 0.5 |
| Mach | (deg) | Reynolds | (K) | Time (s) | (s) | CFL |
|---|---|---|---|---|---|---|
| 0.4 | 15 | 288.0 | 0.021 | 10−4 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagy, P.; Fossati, M. Adaptive Data-Driven Model Order Reduction for Unsteady Aerodynamics. Fluids 2022, 7, 130. https://doi.org/10.3390/fluids7040130
Nagy P, Fossati M. Adaptive Data-Driven Model Order Reduction for Unsteady Aerodynamics. Fluids. 2022; 7(4):130. https://doi.org/10.3390/fluids7040130
Chicago/Turabian StyleNagy, Peter, and Marco Fossati. 2022. "Adaptive Data-Driven Model Order Reduction for Unsteady Aerodynamics" Fluids 7, no. 4: 130. https://doi.org/10.3390/fluids7040130
APA StyleNagy, P., & Fossati, M. (2022). Adaptive Data-Driven Model Order Reduction for Unsteady Aerodynamics. Fluids, 7(4), 130. https://doi.org/10.3390/fluids7040130