
Multifidelity Analysis of a Solo Propeller: Entropy Rise Using Vorticity Dynamics and Kinetic Energy Dissipation


Abstract
:1. Introduction
2. Methodology
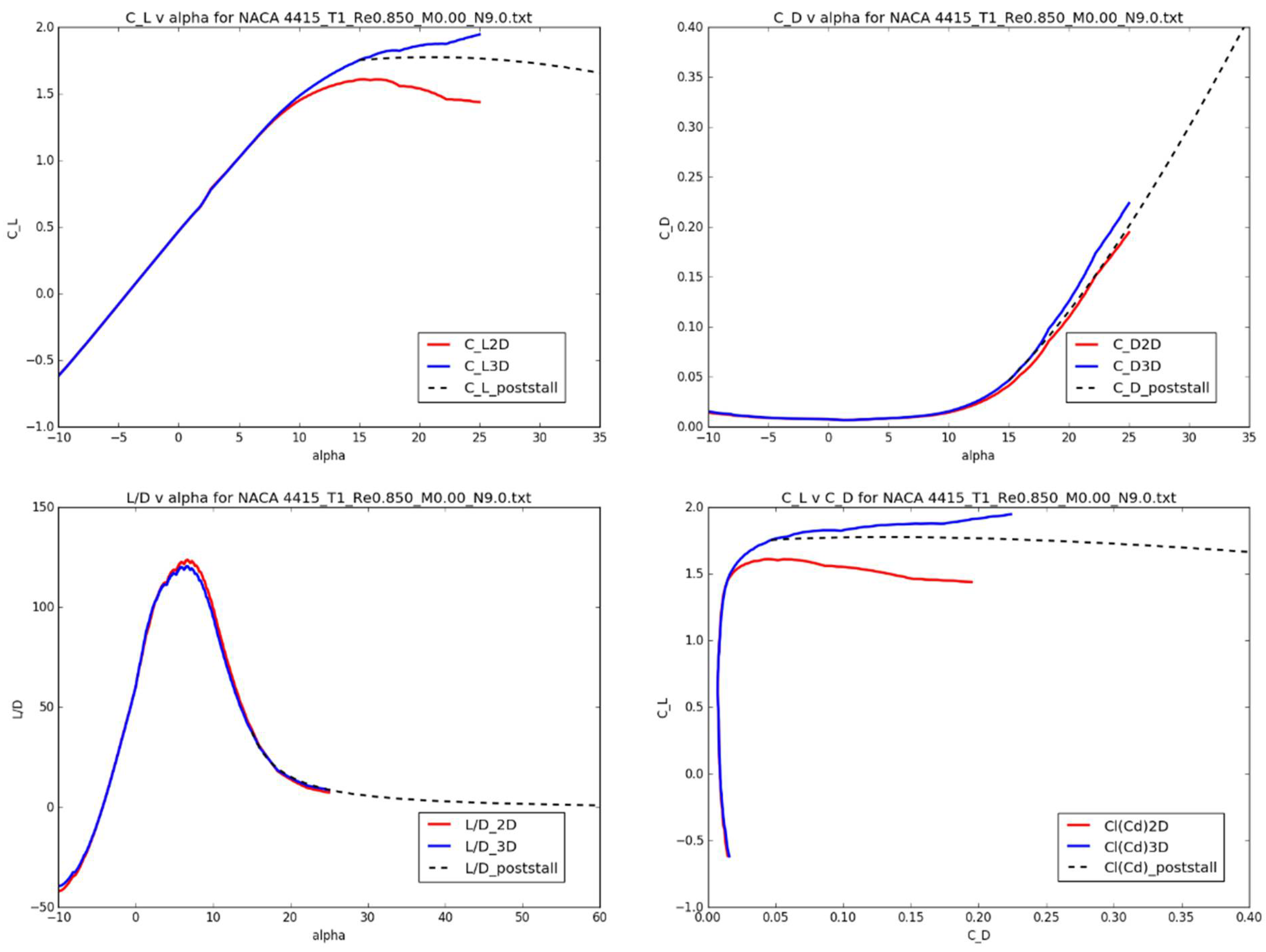
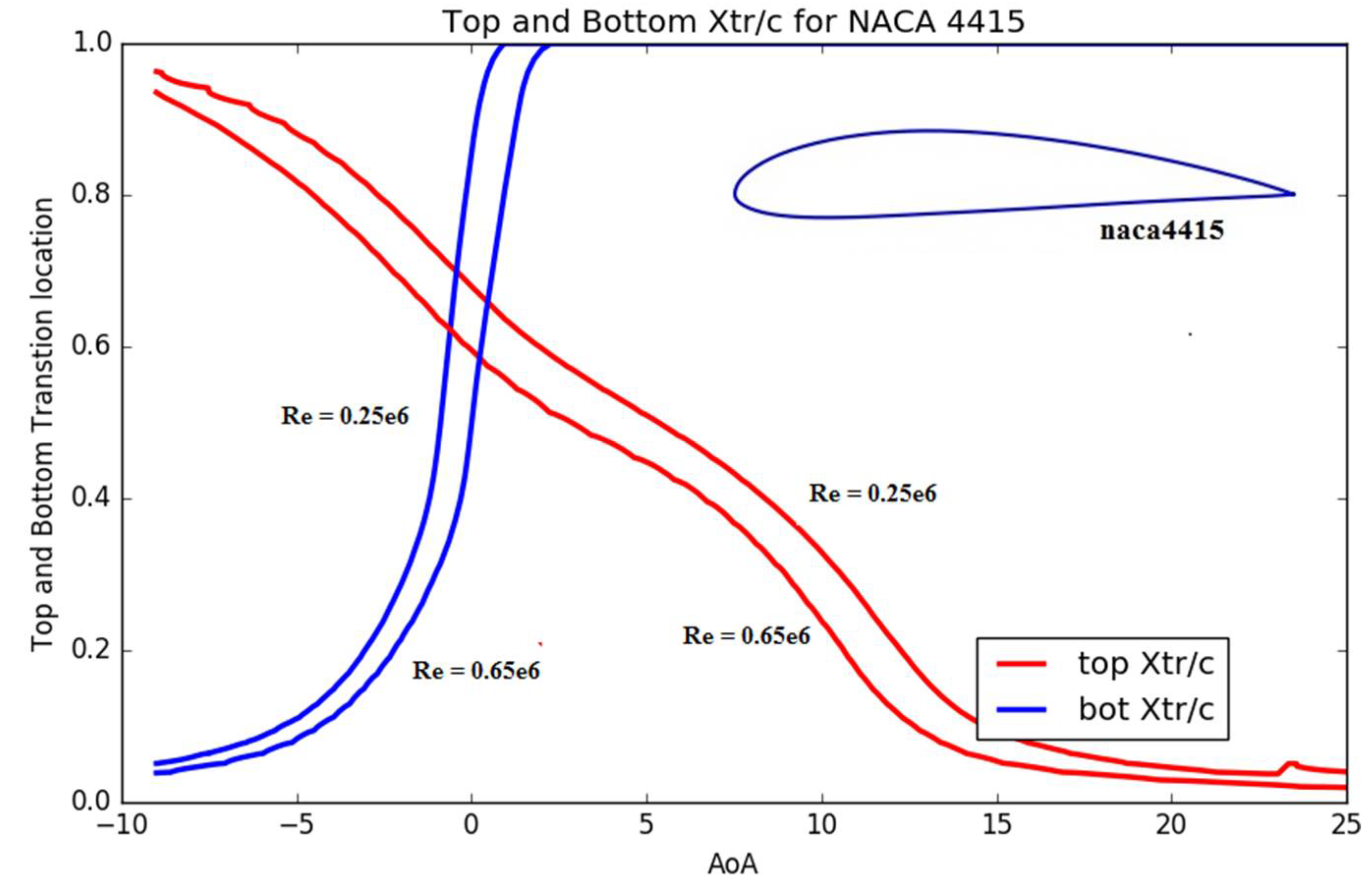
2.1. Airfoil Properties
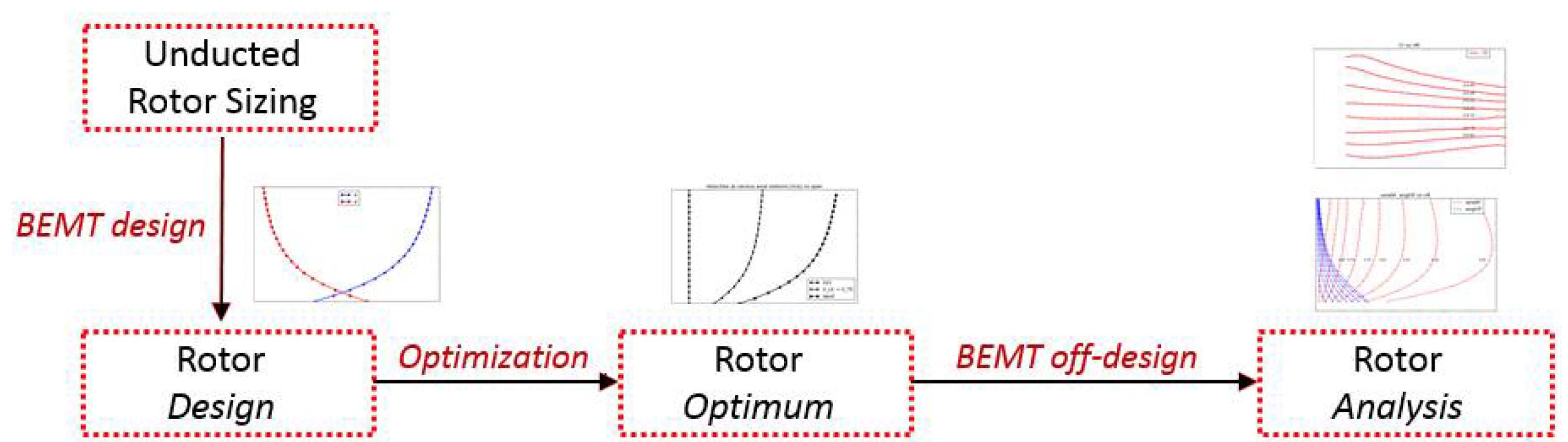
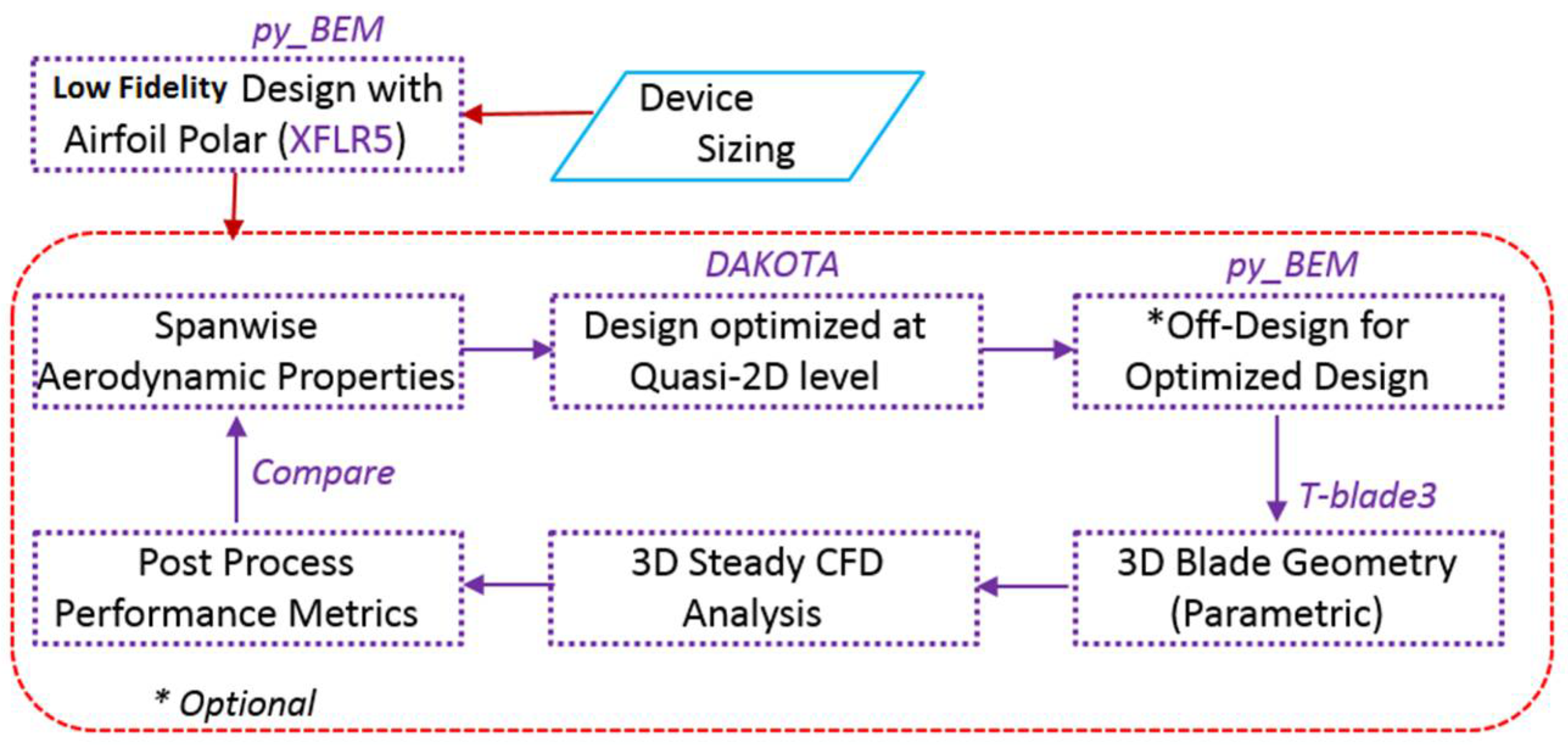
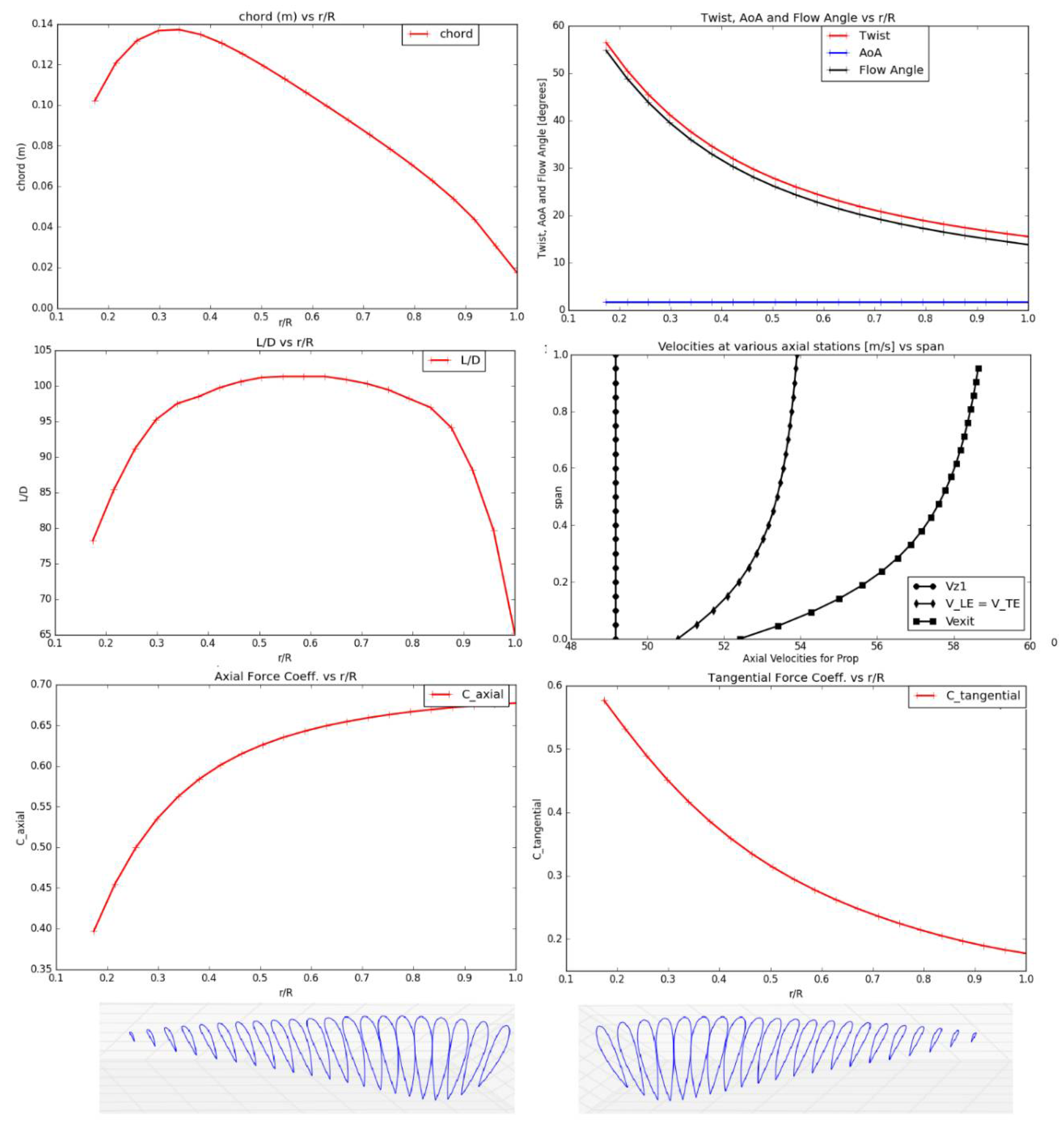
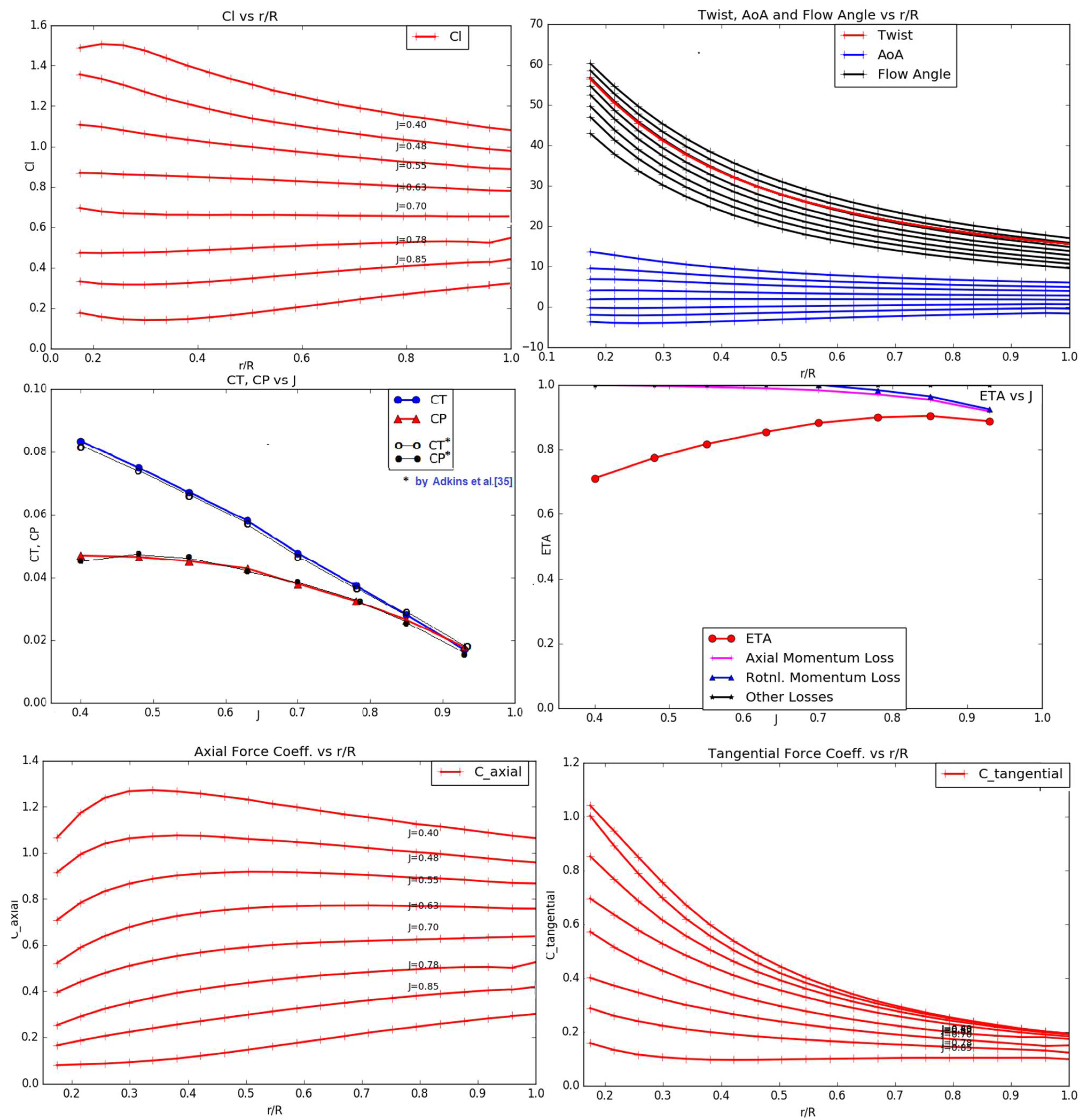
2.2. Low-Fidelity Design, Off-Design and Verification Using BEMT Tool
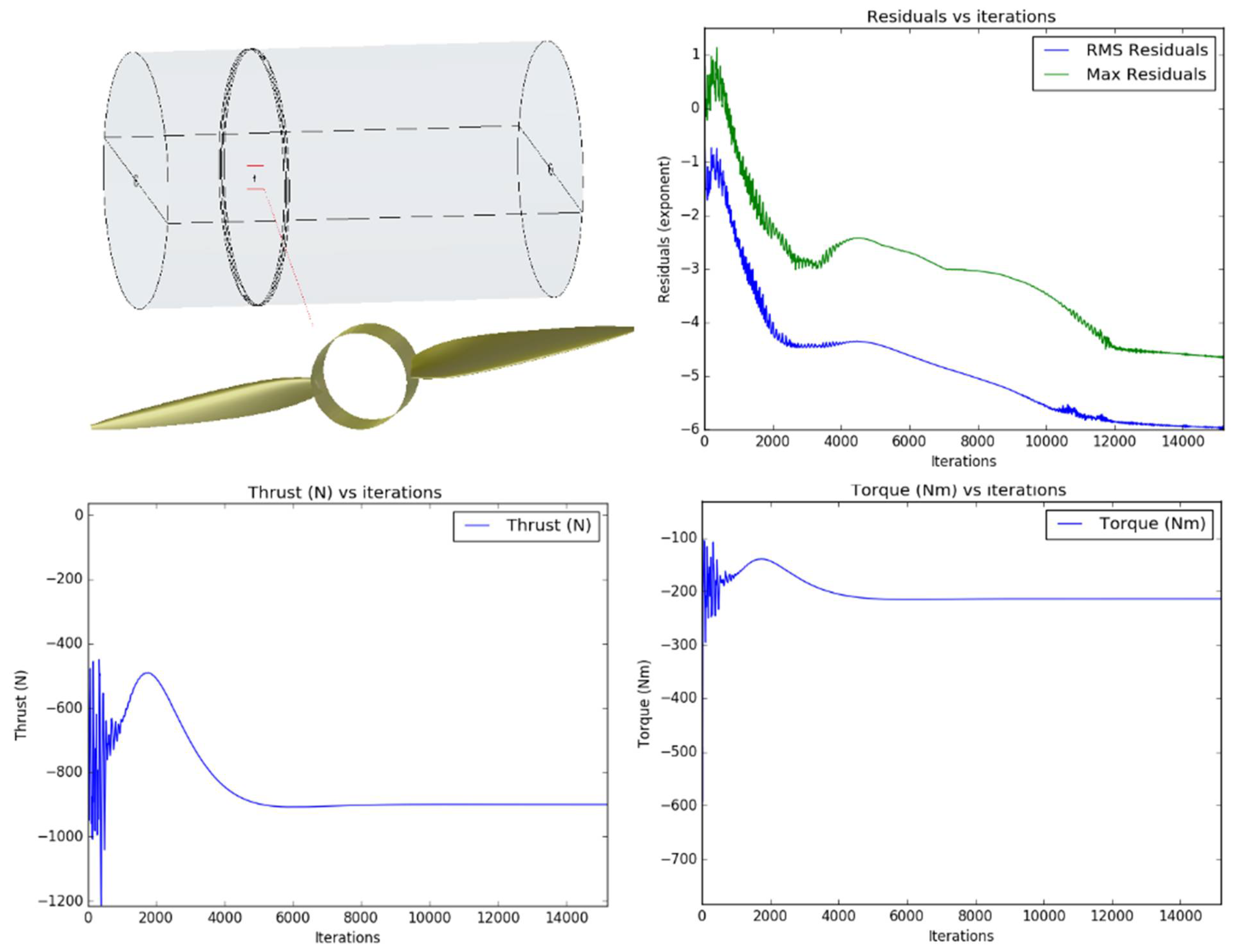
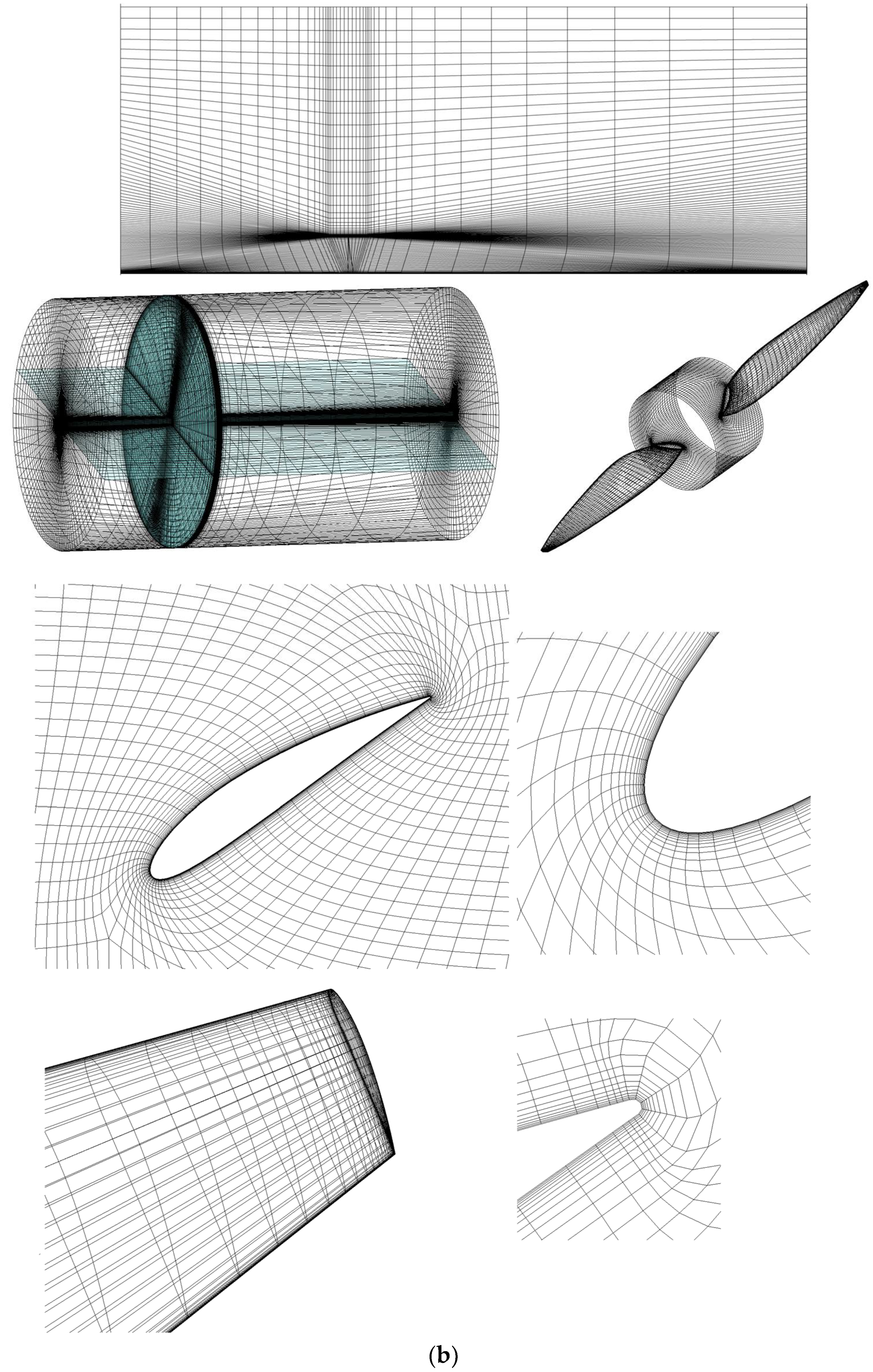
2.3. 3D Geometry and 3D Simulation Setup
3. Results
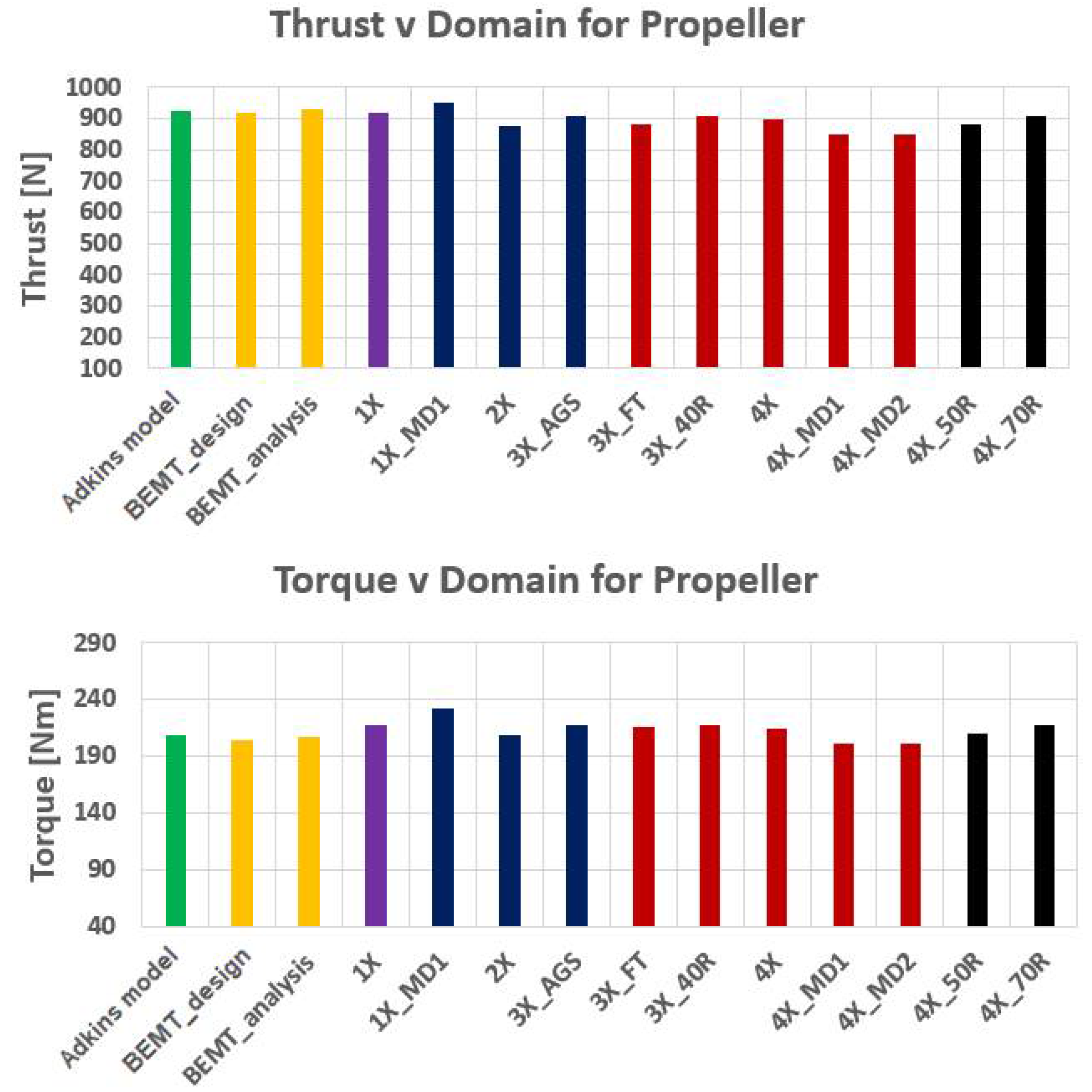
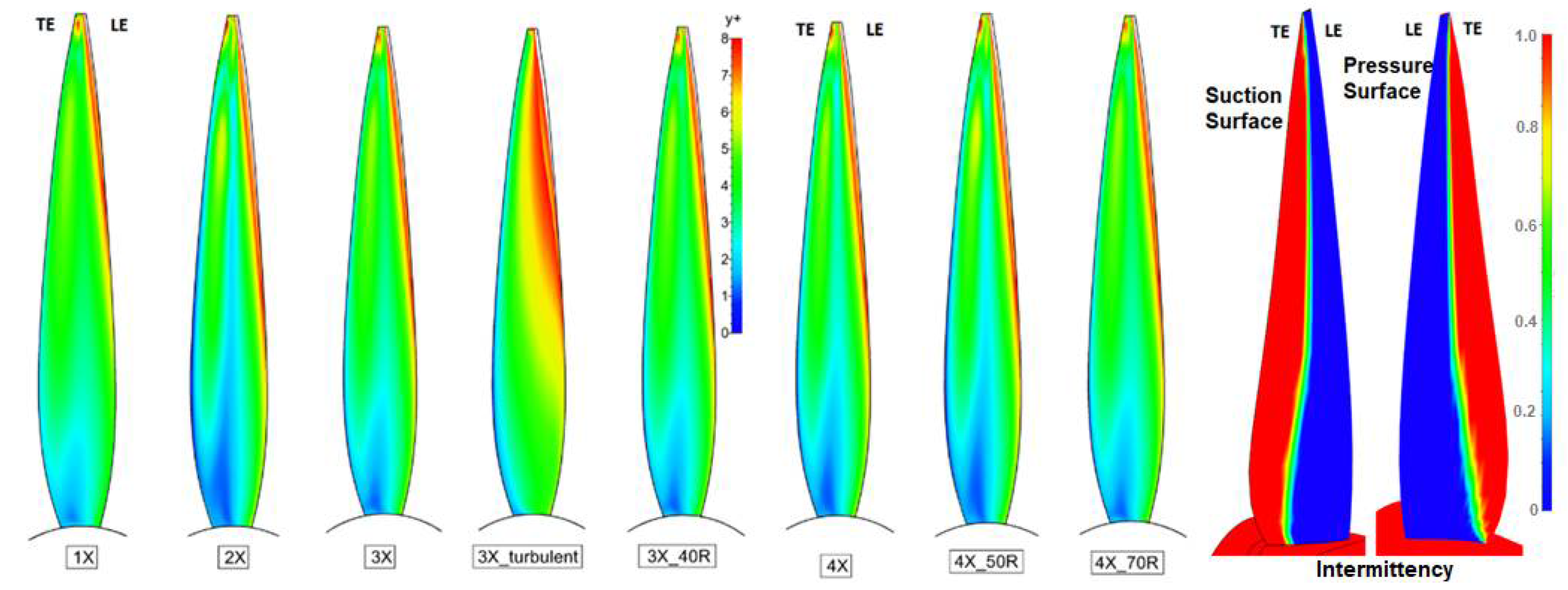
3.1. Comparison between Low and High Fidelity
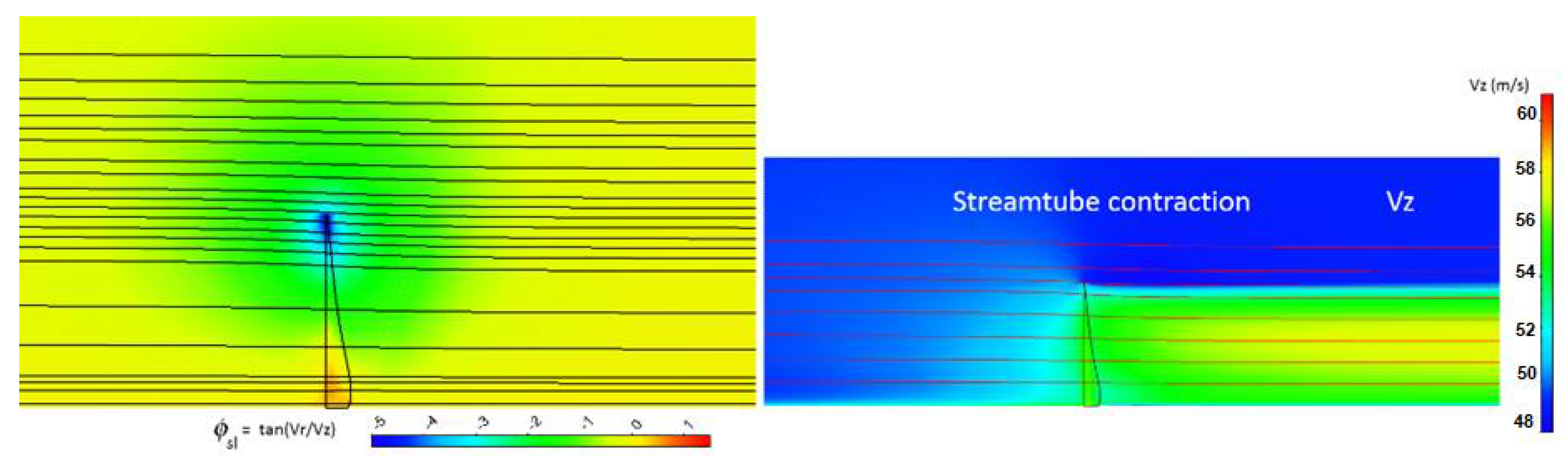
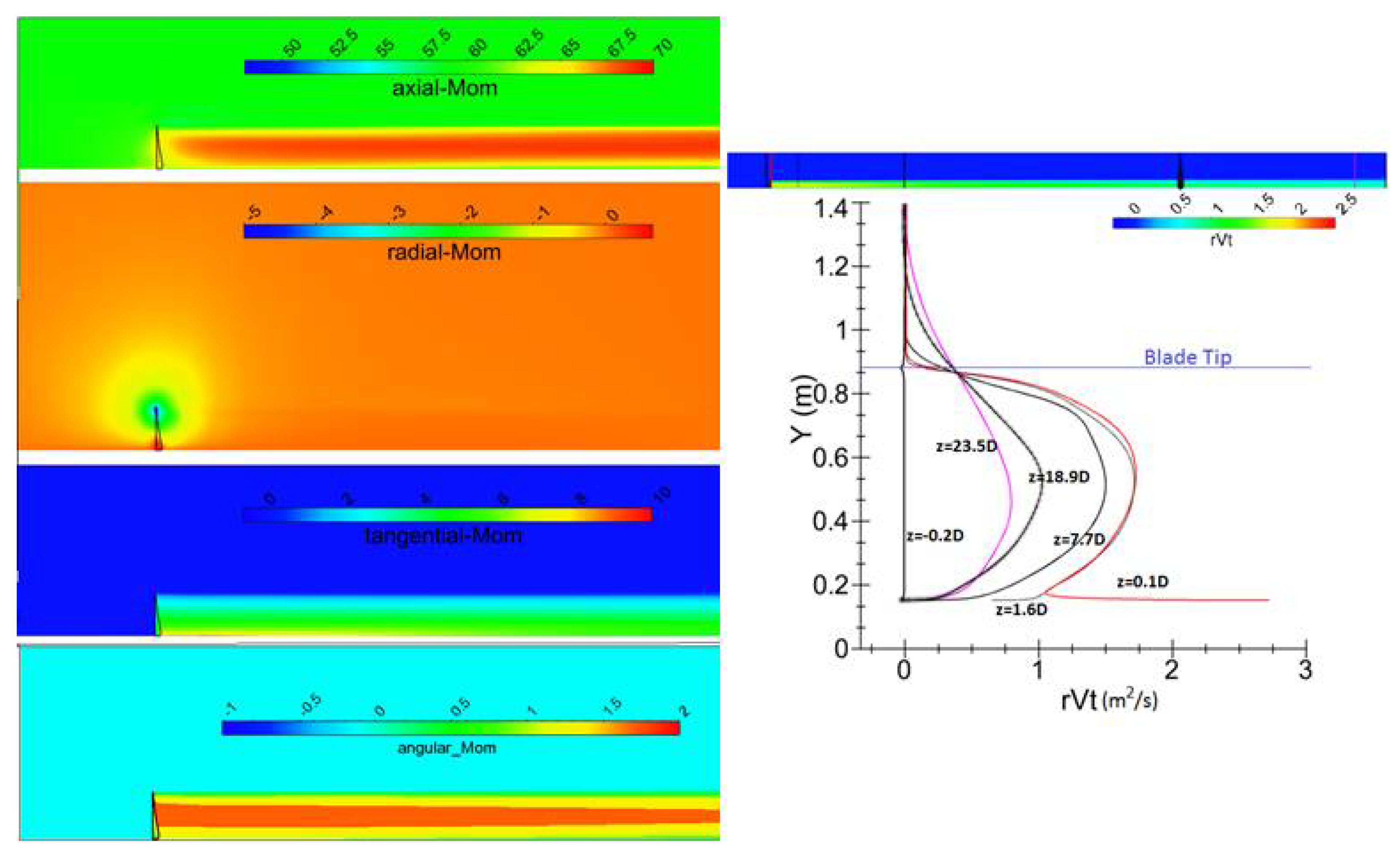
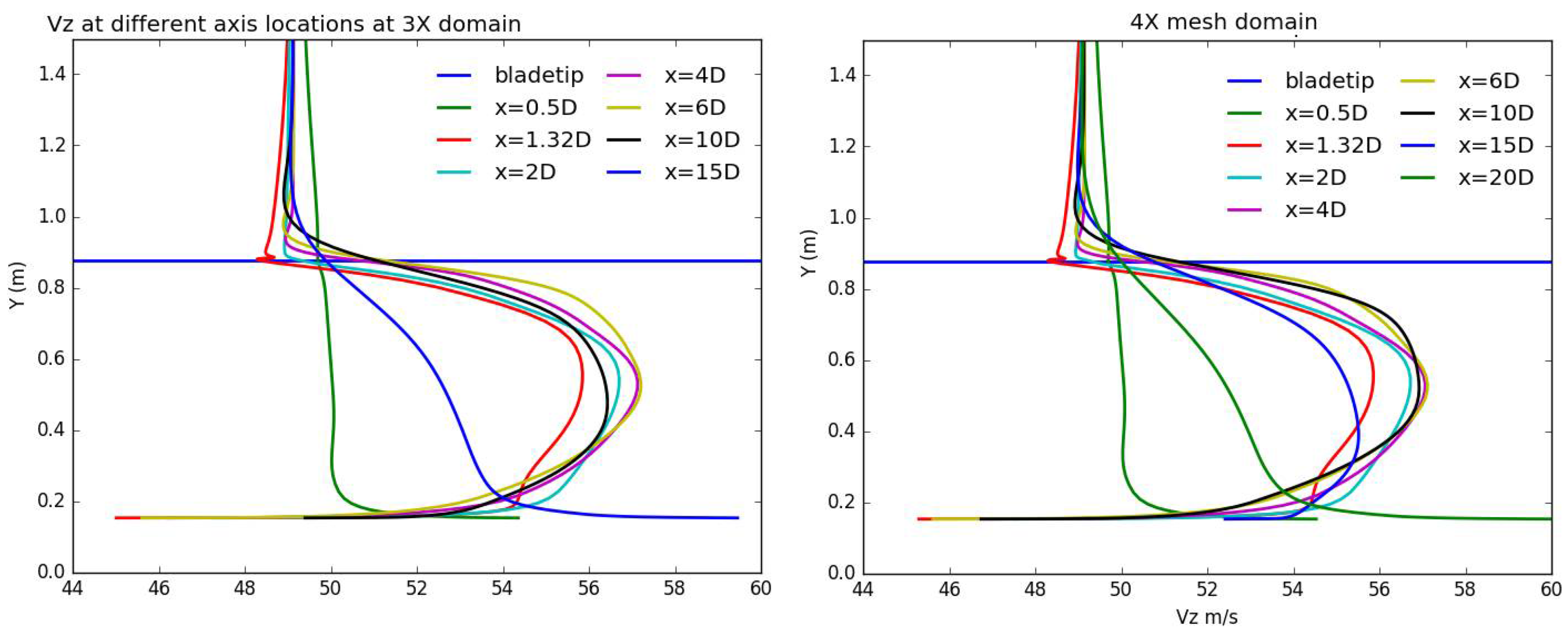
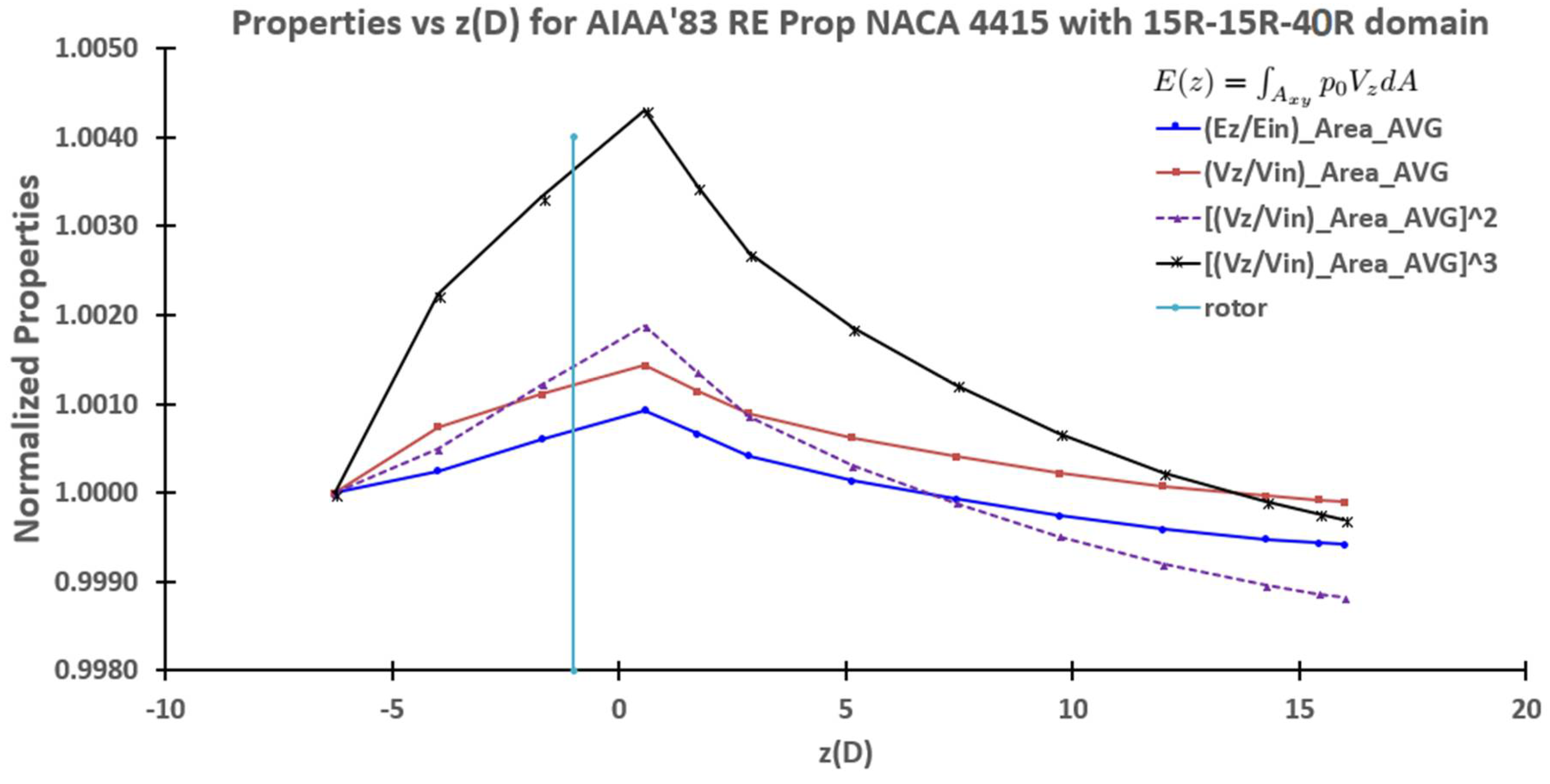
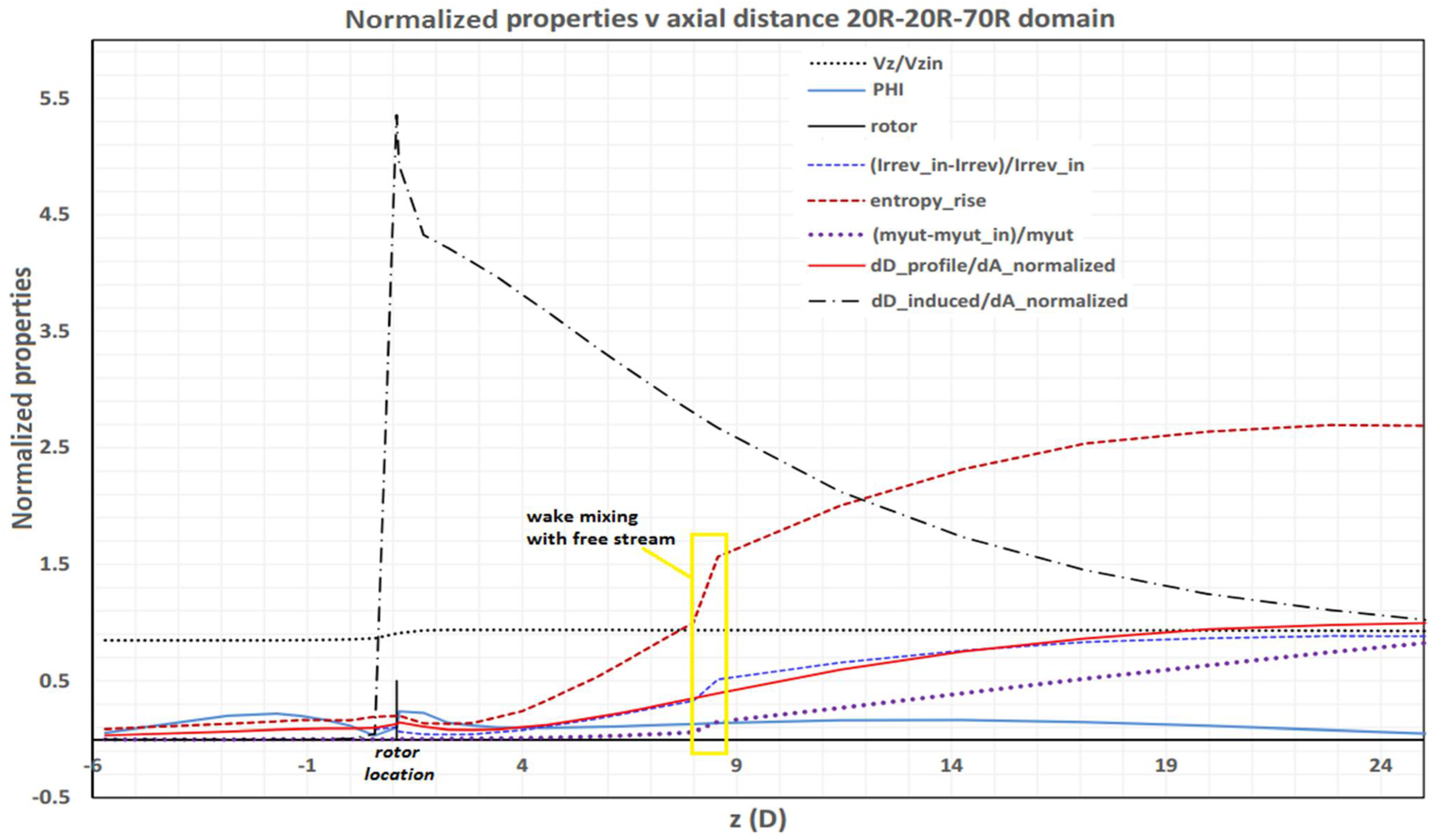
3.2. Momentum Transport and Wake Analysis
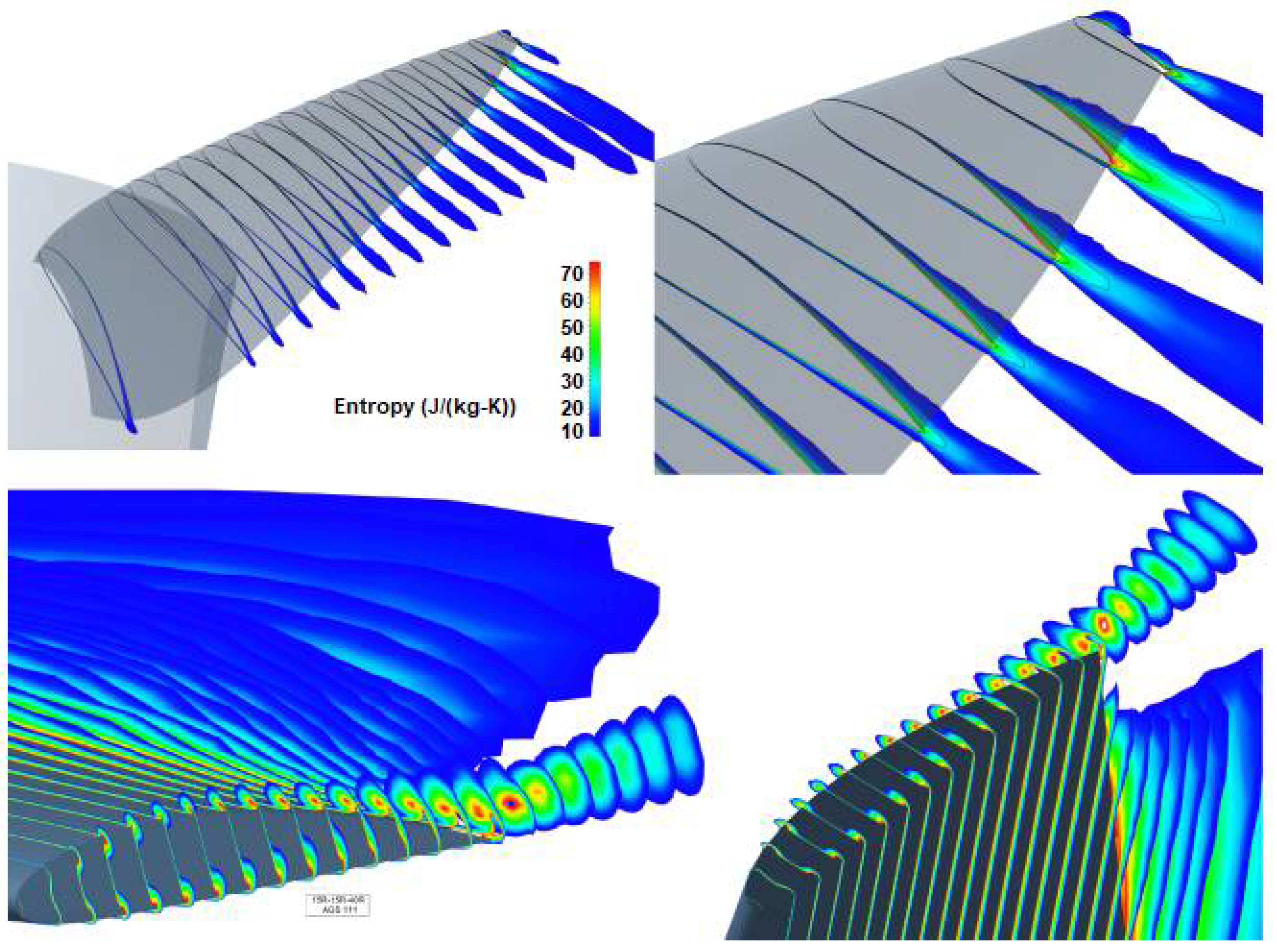
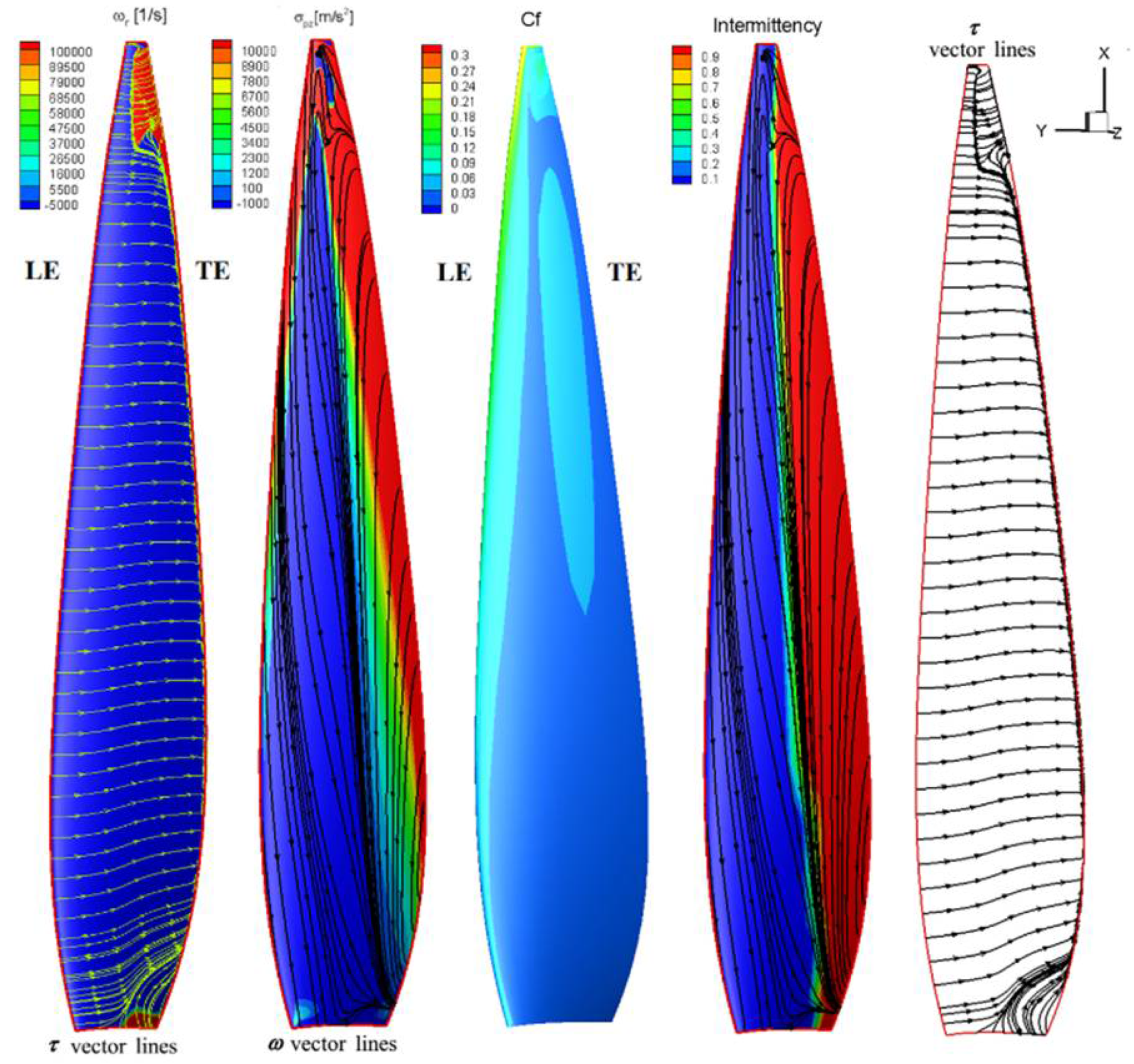
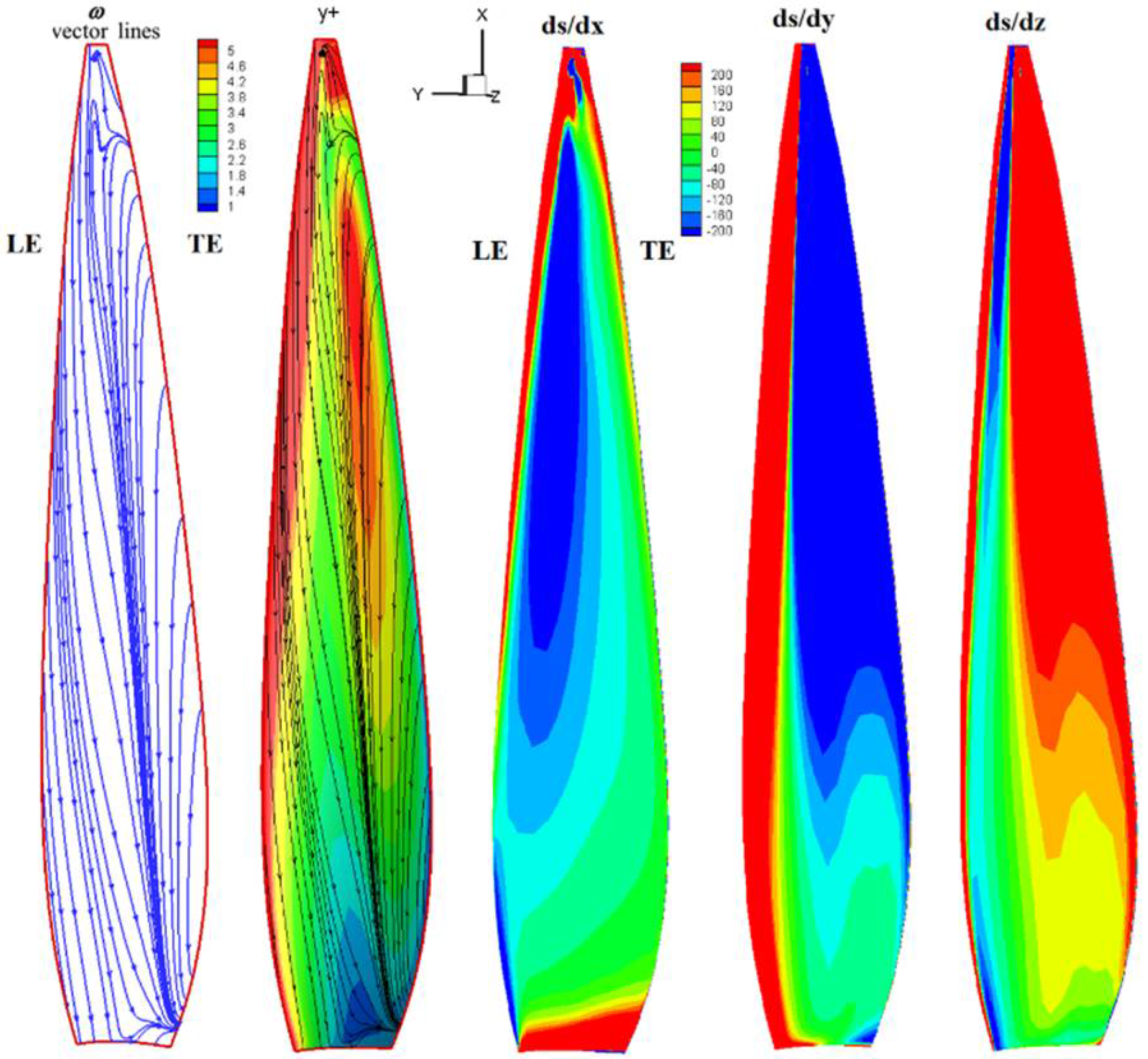
3.3. Vorticity Dynamics and Entropy Increase
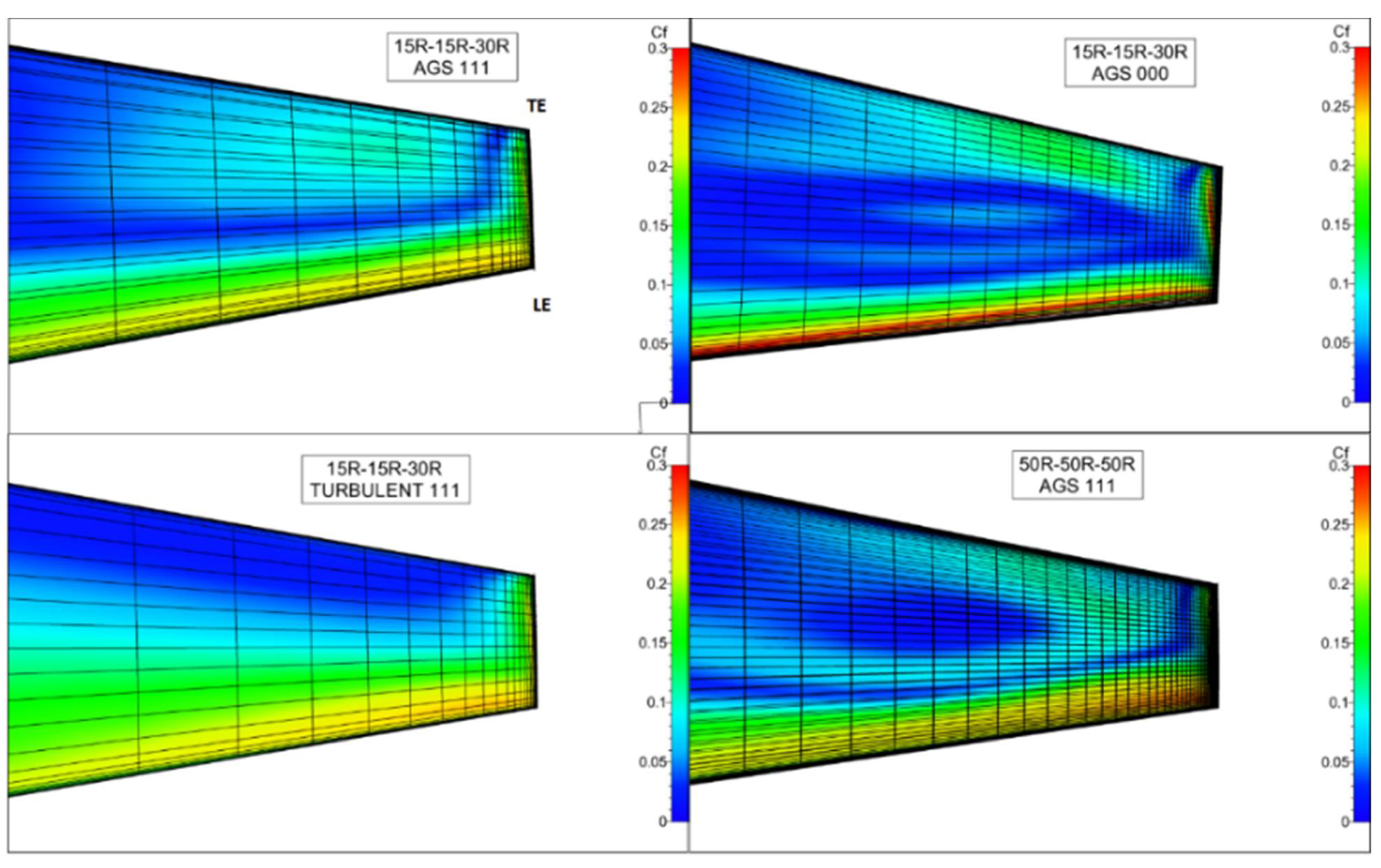
- Separation zone warning: skin-friction vector lines () converge, vorticity vector lines () have large positive curvature and BVF has a peak.
- Separation line criteria: curvature of vorticity lines reaches a maximum.
- Separation watch: Tangent BVF lines turn towards the direction of skin-friction vector lines or tangent pressure-gradient vector lines are normal to the separation line.
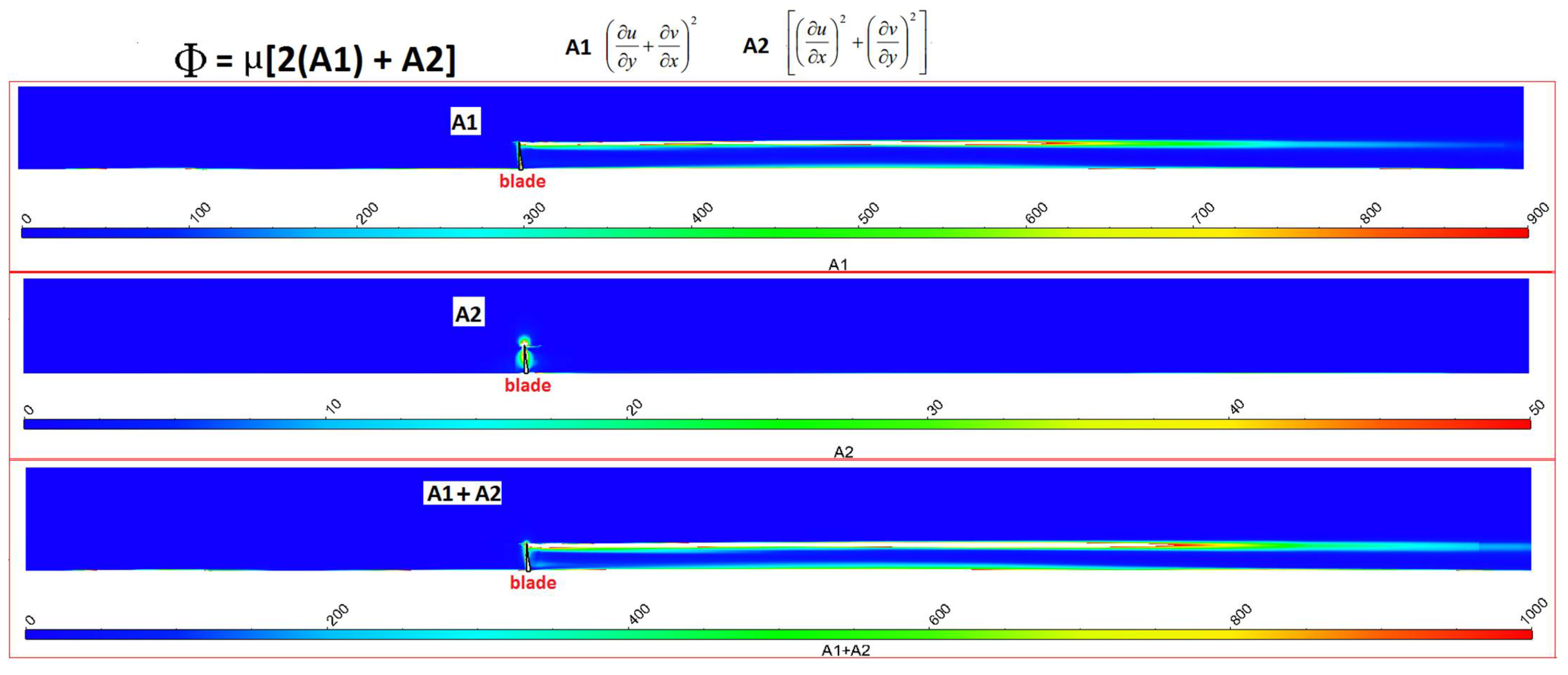
3.4. Kinetic Energy Dissipation as Entropy Rise
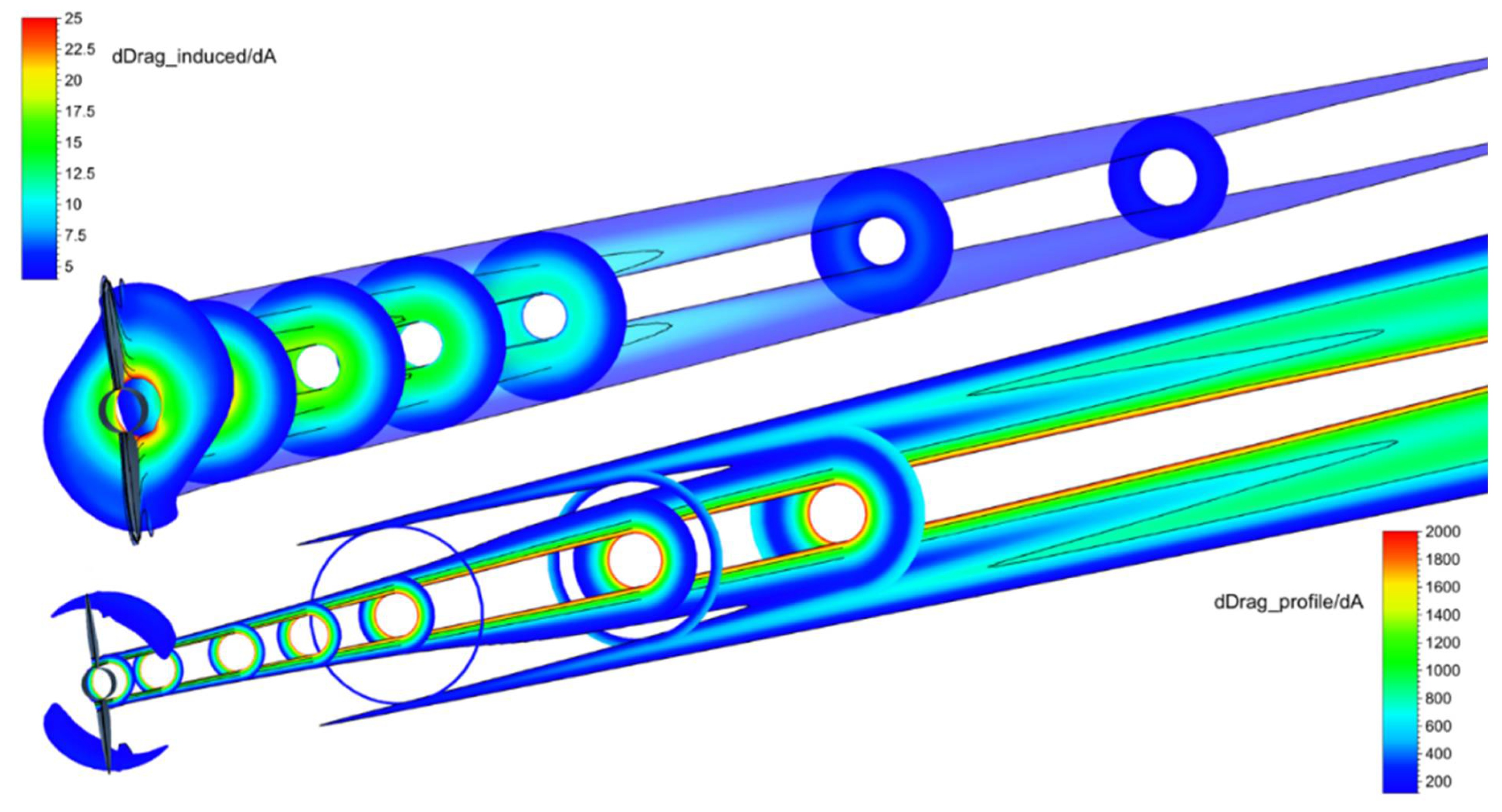
3.5. Drag as a Form of Entropy
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| 2D, 3D | Two, Three-dimensional |
| AGS | Abu-Ghannam/Shaw |
| AoA | Angle of Attack |
| BEMT | Blade-Element Momentum Theory |
| BVF | Boundary Vorticity Flux |
| CFD | Computational Fluid Dynamics |
| NACA | National Advisory Committee for Aeronautics |
| RANS | Reynolds Averaged Navier–Stokes |
| REYN, Re | Reynolds |
| A | Area, Axial |
| a, a′ | Axial and Angular induction factors |
| Cl, Cd | Coefficient of lift and drag |
| CT, CP | Coefficient of Thrust and Power |
| dF, D, L | Elemental Force, Drag, Lift |
| p | Pressure |
| r, R, z | Radial, axial |
| s | Entropy |
| V | Absolute Velocity |
| W | Relative Velocity |
| y+ | Non-dimensional wall distance |
| α | Angle of Attack |
| μ | Dynamic viscosity |
| υ | Kinematic viscosity |
| Ω | Rotational speed of the rotor |
| Vorticity vector, Angular Velocity | |
| φ, Φ | Flow Angle, streamline slope, Dissipation Function |
| ρ | Density of fluid |
| Boundary vorticity flux | |
| Skin Friction vector | |
| θ | Twist Angle |
References
- Xie, Y.; Savvaris, A.; Tsourdos, A.; Zhang, D.; Gu, J. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2021, 34, 432–450. [Google Scholar] [CrossRef]
- Nigam, N.; Tyagi, A.; Chen, P.; Alonso, J.; Palacios, F.; Ol, M.; Byrnes, J. Multi-fidelity multi-disciplinary propeller/rotor analysis and design. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Zhu, H.; Jiang, Z.; Zhao, H.; Pei, S.; Li, H.; Lan, Y. Aerodynamic performance of propellers for multirotor unmanned aerial vehicles: Measurement, analysis, and experiment. Shock. Vib. 2021, 2021, 9538647. [Google Scholar] [CrossRef]
- Rwigema, M.K. Propeller blade element momentum theory with vortex wake deflection. In Proceedings of the 27th International Congress of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Burger, S. Multi-Fidelity Aerodynamic and Aeroacoustics Sensitivity Study of Isolated Propellers. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar]
- Drela, M. QPROP Formulation; Massachusetts Institute of Technology Aeronautics and Astronautics: Cambridge, MA, USA, 2006. [Google Scholar]
- Silvestre, M.A.; Morgado, J.P.; Pascoa, J. JBLADE: A propeller design and analysis code. In Proceedings of the 2013 International Powered Lift Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Projeto, M. Development of An Open Source Software Tool for Propeller Design in the MAAT Project. Ph.D. Thesis, Universidade Da Beira Interior, Covilhã, Portugal, 2016. [Google Scholar]
- Brent, R.P. An algorithm with guaranteed convergence for finding a zero of a function. Comput. J. 1971, 14, 422–425. [Google Scholar] [CrossRef]
- Ning, S.A. A simple solution method for the blade element momentum equations with guaranteed convergence. Wind Energ. 2013, 17, 1327–1345. [Google Scholar] [CrossRef]
- Whitmore, S.A.; Merrill, R.S. Nonlinear large angle solutions of the blade element momentum theory Propeller equations. J. Aircr. 2012, 49, 1126–1134. [Google Scholar] [CrossRef]
- Merrill, R.S. Nonlinear Aerodynamic Corrections to Blade Element Momentum Module with Validation Experiments. Master’s Thesis, Utah State University, Logan, UT, USA, 2011. [Google Scholar]
- Strack, W.C.; Knip, G.; Weisbrach, A.L.; Godston, J.; Bradley, E. Technology and benefits of aircraft counter rotation propeller. Technical Report Technical Memorandum 82983; NASA: Washington, DC, USA, 1982. [Google Scholar]
- Coleman, C.P. A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic Research, Ames Research Center; Technical Paper 3675. Technical Report; NASA: Washington, DC, USA, 1997.
- Olsen, A.S. Energy coefficients for a propeller series. Ocean. Eng. 2004, 31, 401–416. [Google Scholar] [CrossRef]
- McCroskey, W.J. Measurements of Boundary Layer Transition, Separation and Streamline Direction on Rotating Blades; Technical Report NASA TN D-6321, Ames Research Center U.S.; NASA: Washington, DC, USA, 1971.
- Stickle, G.W.; Crigler, J.L. Propeller Analysis from Experimental Data; Technical Report Report No. 712; Langley Memorial Aeronautical Laboratory: Hampton, VA, USA; NACA: Boston, MA, USA, 1941.
- Felli, M. Underlying mechanisms of propeller wake interaction with a wing. J. Fluid Mech. 2021, 908, A10. [Google Scholar] [CrossRef]
- Denton, J.D. Loss mechanisms in turbomachines. J. Turbomach. 1993, 115, 621–656. [Google Scholar] [CrossRef]
- Wu, J.Z.; Wu, J.M. Vorticity dynamics on boundaries. Adv. Appl. Mech. 1996, 32, 119–275. [Google Scholar]
- Nathanael, J.C.; Wang, J.C.; Low, K.H. Numerical studies on modeling the near and far-field wake vortex of a quadrotor in forward flight. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 1166–1183. [Google Scholar] [CrossRef]
- Wu, J.Z.; Zhou, Y.; Fan, M. A note on kinetic energy, dissipation and enstrophy. Phys. Fluids 1999, 11, 503. [Google Scholar] [CrossRef] [Green Version]
- Winter, H.H. Viscous Dissipation Term in Energy Equations; Modular Instruction Series, Module C7.4; American Institute of Chemical Engineers, University of Massachusetts: Lowell, MA, USA, 1987. [Google Scholar]
- Thomas, A.S.; Saric, W.S.; Braslow, A.L.; Bushnell, D.M.; Quinton, P.; Lock, R.C.; Hackett, J.E. Aircraft Drag Prediction and Reduction; Report No. 723. Technical Report; AGARD: Neuilly sur Seine, France, 1985. [Google Scholar]
- Drela, M. Power balance in aerodynamic flow. AIAA J. 2009, 47, 1761–1771. [Google Scholar] [CrossRef] [Green Version]
- Sato, S. The Power Balance Method for Aerodynamic Performance Assessment. Ph.D. Thesis, MIT, Cambridge, MA, USA, 2012. [Google Scholar]
- Berhouni, I.; Bailly, D.; Petropoulos, I. Extension of the exergy balance to rotating frames of reference: Application to a propeller configuration. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. AIAA 2022-0298. [Google Scholar]
- Bergmann, O.; Götten, F.; Braun, C.; Janser, F. Comparison and evaluation of blade element methods against RANS simulations and test data. CEAS Aeronaut. J. 2022, 13, 535–557. [Google Scholar] [CrossRef]
- Jin, M.; Yang, X. A new fixed-point algorithm to solve the blade element momentum equations with high robustness. Energy Sci. Eng. 2021, 9, 1734–1746. [Google Scholar] [CrossRef]
- Ning, A. Using blade element momentum methods with gradient-based design optimization. Struct. Multidisc. Optim. 2021, 64, 991–1014. [Google Scholar] [CrossRef]
- Hoyos, J.D.; Jiménez, J.H.; Echavarría, C.; Alvarado, J.P.; Urrea, G. Aircraft propeller design through constrained aero-structural particle swarm optimization. Aerospace 2022, 9, 153. [Google Scholar] [CrossRef]
- Treuren, K.W.; Sachez, R.; Bennett, B.; Wisniewski, C. Design of propellers for minimum induced drag. In Proceedings of the AIAA Aviation Forum, Virtual Event, 2–6 August 2021. [Google Scholar]
- Naung, S.; Nakhchi, M.; Rahmati, M. An experimental and numerical study on the aerodynamic performance of vibrating wind turbine blade with frequency-domain method. J. Appl. Comput. Mech. 2021, 7, 1737–1750. [Google Scholar]
- Hasan, M.S.; Chanda, R.K.; Mondal, R.N.; Lorenzini, G. Effects of rotation on unsteady fluid flow and forced convection in the rotating curved square duct with a small curvature. Facta Univ. Ser. Mech. Eng. 2021, 26, 29–50. [Google Scholar] [CrossRef]
- Adkins, C.N.; Liebeck, R.H. Design of optimum propellers. In Proceedings of the AIAA 21st Aerospace Sciences Meeting, Reno, NV, USA, 10–13 January 1983. AIAA-83-0190. [Google Scholar]
- Adkins, C.N.; Liebeck, R.H. Design of optimum propellers. J. Propuls. Power 1994, 10, 676–682. [Google Scholar] [CrossRef]
- Siddappaji, K. On the Entropy Rise in General Unducted Rotors using Momentum, Vorticity and Energy Transport. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, 2018. [Google Scholar]
- Drela, M. XFOIL: An analysis and design system for low reynolds number airfoils. In Proceedings of the Low Reynolds Number Aerodynamics. Lecture Notes in Engineering, Notre Dame, IN, USA, 5–7 June 1989; Mueller, T.J., Ed.; Springer: Berlin/Heidelberg, Germany, 1989; Volume 54. [Google Scholar]
- Du, Z.; Selig, M.S. The effect of rotation on the boundary layer of a wind turbine blade. Renew. Energy 1999, 20, 167–181. [Google Scholar] [CrossRef]
- Breton, S.P.; Coton, F.N.; Moe, G. A study on rotational effects and different stall delay models using a prescribed wake vortex scheme and NREL phase VI experiment data. Wind. Energy 2008, 11, 459–482. [Google Scholar] [CrossRef]
- NUMECA International. Autogrid, FineTurbo. Available online: https://numeca.be/index.php?id=25 (accessed on 20 December 2020).
- Tsatsaronis, G.; Cziesla, F. Exergy balance and exergetic efficiency. Encycl. Life Support Syst. 2009, 1, 60–78. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Units | Specifications |
|---|---|---|
| Airfoil | (-) | NACA 4415 |
| Hub diameter | (m) | 0.3048 |
| Tip diameter | (m) | 1.7526 |
| Axial Velocity | (m/s) | 49.17 |
| Blade count | (-) | 2 |
| Advance ratio (J) | (-) | 0.7 |
| RPM | (-) | 2400 |
| Chord | (m) | Specified |
| Type | L_Up | H_Far | H_Down | Grid (x e6) | Thrust (N) | Torque (Nm) | Power (kW) | %Diff Thrust | %Diff Torque | CT | CP | ETA% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Adkins model [35] | 922.74 | 207.70 | 52.20 | 0.0402 | 0.0504 | 87.73 | ||||||
| BEMT_design | 917.41 | 203.82 | 51.23 | 0.0395 | 0.0496 | 87.89 | ||||||
| BEMT_analysis | 932.21 | 207.47 | 52.14 | 0.0403 | 0.0499 | 86.75 | ||||||
| 1X | 5R | 5R | 10R | 0.25 | 951.36 | 231.61 | 58.22 | +3.11 | 11.51 | 0.0449 | 0.0514 | 80.19 |
| 1X_denser | 5R | 5R | 10R | 0.29 | 920.73 | 217.31 | 54.62 | −0.21 | 4.63 | 0.0421 | 0.0498 | 82.73 |
| 2X | 10R | 10R | 20R | 0.75 | 878.10 | 208.37 | 52.37 | −4.83 | 0.32 | 0.0404 | 0.0475 | 82.28 |
| 3X_AGS | 15R | 15R | 30R | 0.46 | 908.84 | 217.26 | 54.60 | −1.50 | 4.60 | 0.0421 | 0.0491 | 81.68 |
| 3X_FT | 15R | 15R | 30R | 0.46 | 883.91 | 215.18 | 54.08 | −4.20 | 3.60 | 0.0417 | 0.0478 | 80.21 |
| 3X_40R | 15R | 15R | 40R | 0.46 | 908.46 | 217.20 | 54.59 | −1.54 | 4.57 | 0.0421 | 0.0491 | 81.67 |
| 4X | 20R | 20R | 40R | 0.53 | 900.10 | 214.00 | 53.78 | −2.45 | 3.03 | 0.0415 | 0.0487 | 82.12 |
| 4X_denser1 | 20R | 20R | 40R | 1.12 | 847.17 | 201.07 | 50.53 | −8.19 | −3.19 | 0.0390 | 0.0458 | 82.27 |
| 4X_denser2 | 20R | 20R | 40R | 1.41 | 849.53 | 201.51 | 50.64 | −7.93 | −2.98 | 0.0391 | 0.0459 | 82.32 |
| 4X_50R | 20R | 20R | 50R | 0.73 | 884.00 | 210.08 | 52.80 | −4.19 | 1.15 | 0.0407 | 0.0478 | 82.16 |
| 4X_70R | 20R | 20R | 70R | 0.46 | 907.37 | 217.07 | 54.56 | −1.66 | 4.51 | 0.0421 | 0.0491 | 81.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddappaji, K.; Turner, M. Multifidelity Analysis of a Solo Propeller: Entropy Rise Using Vorticity Dynamics and Kinetic Energy Dissipation. Fluids 2022, 7, 177. https://doi.org/10.3390/fluids7050177
Siddappaji K, Turner M. Multifidelity Analysis of a Solo Propeller: Entropy Rise Using Vorticity Dynamics and Kinetic Energy Dissipation. Fluids. 2022; 7(5):177. https://doi.org/10.3390/fluids7050177
Chicago/Turabian StyleSiddappaji, Kiran, and Mark Turner. 2022. "Multifidelity Analysis of a Solo Propeller: Entropy Rise Using Vorticity Dynamics and Kinetic Energy Dissipation" Fluids 7, no. 5: 177. https://doi.org/10.3390/fluids7050177
APA StyleSiddappaji, K., & Turner, M. (2022). Multifidelity Analysis of a Solo Propeller: Entropy Rise Using Vorticity Dynamics and Kinetic Energy Dissipation. Fluids, 7(5), 177. https://doi.org/10.3390/fluids7050177