
Analysis and Computations of Optimal Control Problems for Boussinesq Equations



Abstract
:1. Introduction
2. Notation
3. Optimal Control of Boussinesq Equations
3.1. Dirichlet Boundary Control
3.1.1. Weak Formulation and Lagrange Multiplier Approach
- such that for a.e. and for all ;
- such that for a.e. ;
3.1.2. The Optimality System
3.1.3. Numerical Algorithm
- (a)
- Initial step:
- (b)
- Main loop:
3.2. Neumann Boundary Control
3.2.1. Weak Formulation and Lagrange Multiplier Approach
3.2.2. The Optimality System
3.2.3. Numerical Algorithm
3.3. Distributed Control
3.3.1. Weak Formulation and Lagrange Multiplier Approach
3.3.2. Optimality System
3.3.3. Numerical Algorithm
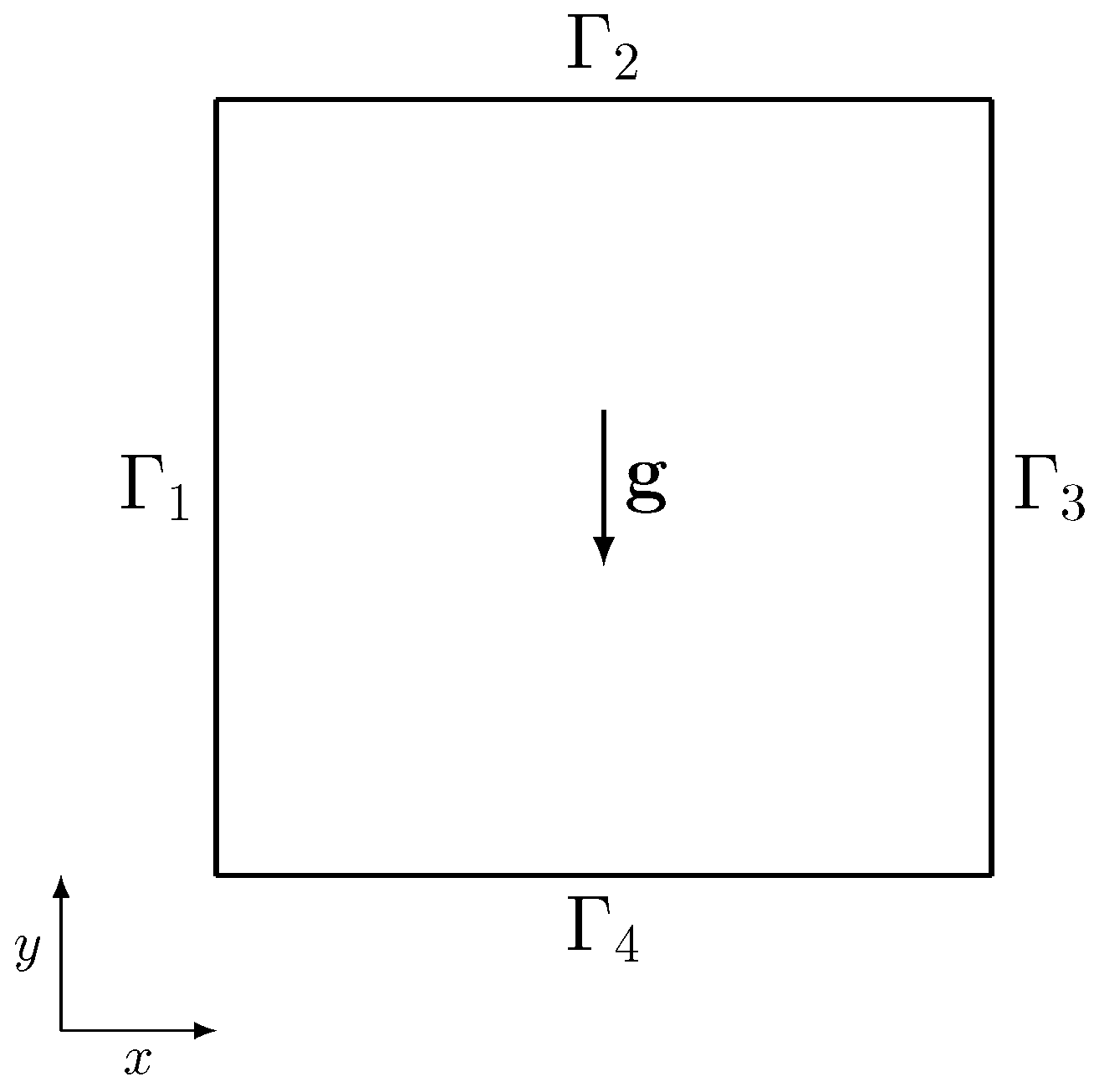
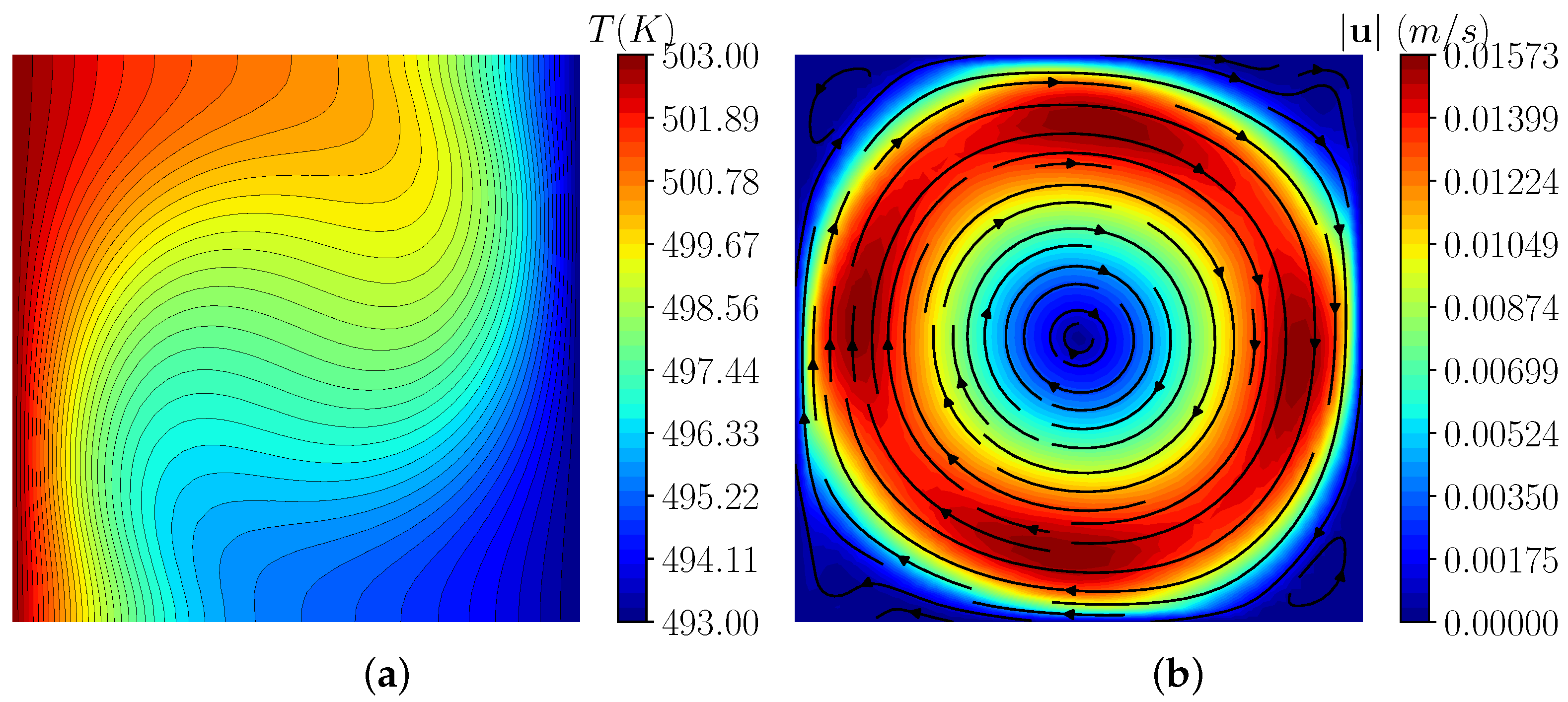
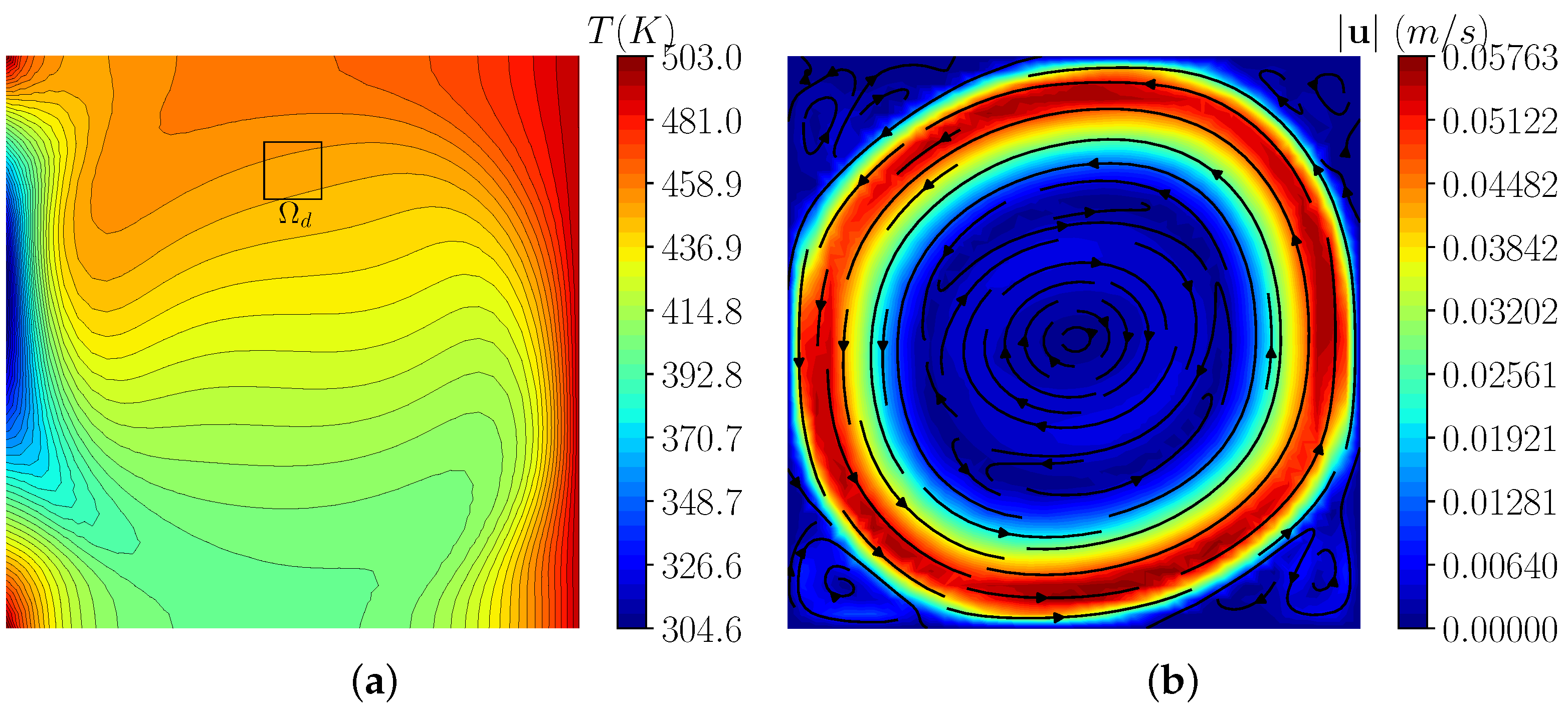
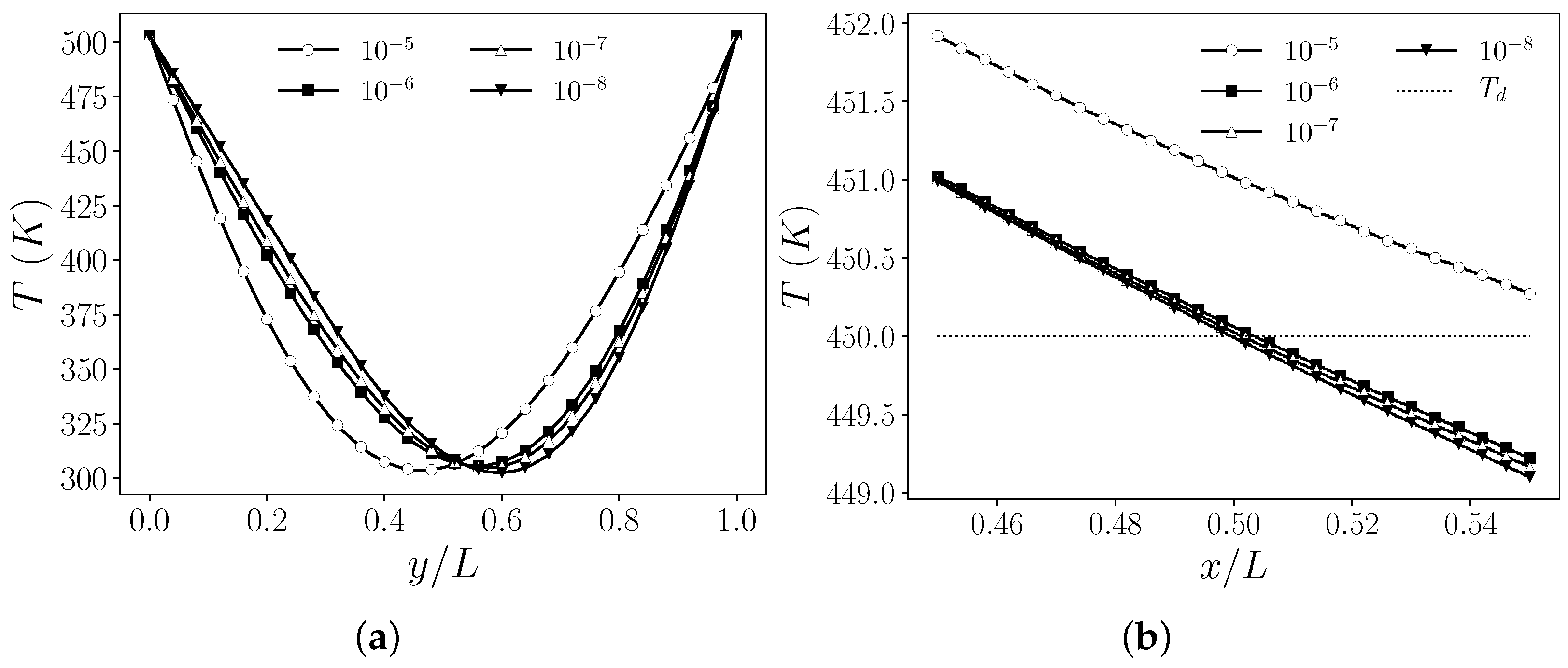
4. Numerical Results
4.1. Dirichlet Boundary Control
4.1.1. Temperature Matching Case
4.1.2. Velocity Matching Case 1
4.1.3. Velocity Matching Case 2
4.2. Neumann Boundary Control
4.3. Distributed Control
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chirco, L.; Chierici, A.; Da Vià, R.; Giovacchini, V.; Manservisi, S. Optimal Control of the Wilcox turbulence model with lifting functions for flow injection and boundary control. J. Phys. Conf. Ser. 2019, 1224, 012006. [Google Scholar] [CrossRef]
- Gunzburger, M.D.; Hou, L.S.; Svobodny, T.P. The approximation of boundary control problems for fluid flows with an application to control by heating and cooling. Comput. Fluids 1993, 22, 239–251. [Google Scholar] [CrossRef]
- Lee, H.C. Analysis and computational methods of Dirichlet boundary optimal control problems for 2D Boussinesq equations. Adv. Comput. Math. 2003, 19, 255–275. [Google Scholar] [CrossRef]
- Aulisa, E.; Bornia, G.; Manservisi, S. Boundary control problems in convective heat transfer with lifting function approach and multigrid vanka-type solvers. Commun. Comput. Phys. 2015, 18, 621–649. [Google Scholar] [CrossRef]
- Lee, H.C.; Shin, B.C. Piecewise optimal distributed controls for 2D Boussinesq equations. Math. Methods Appl. Sci. 2000, 23, 227–254. [Google Scholar] [CrossRef]
- Gunzburger, M.D.; Kim, H.; Manservisi, S. On a shape control problem for the stationary Navier-Stokes equations. ESAIM Math. Model. Numer. Anal. 2000, 34, 1233–1258. [Google Scholar] [CrossRef] [Green Version]
- Gunzburger, M.D. Perspectives in Flow Control and Optimization; SIAM: Philadelphia, PA, USA, 2003; Volume 5. [Google Scholar]
- Smith, C.F.; Cinotti, L. Lead-cooled fast reactor. In Handbook of Generation IV Nuclear Reactors; Elsevier: Amsterdam, The Netherlands, 2016; pp. 119–155. [Google Scholar]
- Lee, H.C.; Imanuvilov, O.Y. Analysis of optimal control problems for the 2-D stationary Boussinesq equations. J. Math. Anal. Appl. 2000, 242, 191–211. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.C. Optimal control problems for the two dimensional Rayleigh—Bénard type convection by a gradient method. Jpn. J. Ind. Appl. Math. 2009, 26, 93–121. [Google Scholar] [CrossRef]
- Lee, H.C.; Kim, S.H. Finite element approximation and computations of optimal Dirichlet boundary control problems for the Boussinesq equations. J. Korean Math. Soc. 2004, 41, 681–715. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.C. Analysis and computations of Neumann boundary optimal control problems for the stationary Boussinesq equations. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 5, pp. 4503–4508. [Google Scholar]
- Alekseev, G. Solvability of stationary boundary control problems for heat convection equations. Sib. Math. J. 1998, 39, 844–858. [Google Scholar] [CrossRef]
- Alekseev, G.; Tereshko, D. Boundary control problems for stationary equations of heat convection. In New Directions in Mathematical Fluid Mechanics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–21. [Google Scholar]
- Baranovskii, E.S.; Domnich, A.A.; Artemov, M.A. Optimal boundary control of non-isothermal viscous fluid flow. Fluids 2019, 4, 133. [Google Scholar] [CrossRef] [Green Version]
- Baranovskii, E.S. Optimal boundary control of the Boussinesq approximation for polymeric fluids. J. Optim. Theory Appl. 2021, 189, 623–645. [Google Scholar] [CrossRef]
- Baranovskii, E.S. The optimal start control problem for two-dimensional Boussinesq equations. Izv. Math. 2022, 86, 221–242. [Google Scholar] [CrossRef]
- Ciarlet, P.G. The Finite Element Method for Elliptic Problems; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Droniou, J. Non-coercive linear elliptic problems. Potential Anal. 2002, 17, 181–203. [Google Scholar] [CrossRef]
- Chierici, A.; Giovacchini, V.; Manservisi, S. Analysis and numerical results for boundary optimal control problems applied to turbulent buoyant flows. Int. J. Numer. Anal. Model. 2022, 19, 347–368. [Google Scholar]
- Giovacchini, V. Development of a numerical platform for the modeling and optimal control of liquid metal flows. Ph.D. Thesis, University of Bologna, Bologna, Italy, 2022. [Google Scholar]
- Chierici, A.; Barbi, G.; Bornia, G.; Cerroni, D.; Chirco, L.; Da Vià, R.; Giovacchini, V.; Manservisi, S.; Scardovelli, R.; Cervone, A. FEMuS-Platform: A numerical platform for multiscale and multiphysics code coupling. In Proceedings of the 9th edition of the International Conference on Computational Methods for Coupled Problems in Science and Engineering (COUPLED PROBLEMS 2021), Virtual, 13–16 June 2021. [Google Scholar]
- Barakos, G.; Mitsoulis, E.; Assimacopoulos, D. Natural convection flow in a square cavity revisited: Laminar and turbulent models with wall functions. Int. J. Numer. Methods Fluids 1994, 18, 695–719. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Symbol | Value | Units |
|---|---|---|---|
| Viscosity | |||
| Density | |||
| Thermal conductivity | W/(mK) | ||
| Specific heat | c | J/(kgK) | |
| Coefficient of expansion |
| Reference | |||||
|---|---|---|---|---|---|
| 3.110 | 2.179 | 2.091 | 1.979 | 1250 | |
| % Reduction | 0 | ||||
| Iterations n | 6 | 5 | 6 | 10 | 0 |
| Reference | ||||||
|---|---|---|---|---|---|---|
| 586.3 | 413.6 | 137.4 | 9.767 | 8.796 | 701.1 | |
| % Reduction | 0 | |||||
| Iterations n | 5 | 5 | 4 | 6 | 5 | 0 |
| Reference | ||||
|---|---|---|---|---|
| 246.6 | 36.04 | 1.677 | 5423 | |
| % Reduction | 0 | |||
| Iterations n | 4 | 10 | 9 | 0 |
| Reference | |||||
|---|---|---|---|---|---|
| 30.58 | 30.14 | 8.454 | 1.536 | 206.1 | |
| % Reduction | 0 | ||||
| Iterations n | 4 | 14 | 9 | 7 | 0 |
| Reference | ||||
|---|---|---|---|---|
| 2.792 | 2.229 | 2.159 | 2061 | |
| % Reduction | 0 | |||
| Iterations n | 3 | 13 | 35 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chierici, A.; Giovacchini, V.; Manservisi, S. Analysis and Computations of Optimal Control Problems for Boussinesq Equations. Fluids 2022, 7, 203. https://doi.org/10.3390/fluids7060203
Chierici A, Giovacchini V, Manservisi S. Analysis and Computations of Optimal Control Problems for Boussinesq Equations. Fluids. 2022; 7(6):203. https://doi.org/10.3390/fluids7060203
Chicago/Turabian StyleChierici, Andrea, Valentina Giovacchini, and Sandro Manservisi. 2022. "Analysis and Computations of Optimal Control Problems for Boussinesq Equations" Fluids 7, no. 6: 203. https://doi.org/10.3390/fluids7060203
APA StyleChierici, A., Giovacchini, V., & Manservisi, S. (2022). Analysis and Computations of Optimal Control Problems for Boussinesq Equations. Fluids, 7(6), 203. https://doi.org/10.3390/fluids7060203