3.1.1. Compression of Toroidal and Uniform Vertical Poloidal Vacuum Magnetic Fields
In this section, two verification tests for cylindrical compression of vacuum magnetic fields by imploding liquid liner are considered. In the first test, a compression of a toroidal magnetic field introduced into a vacuum (gas) region at the start of simulation is discussed, while in the second test, the uniform vertical (poloidal) magnetic field is added in addition to the toroidal one. One should note that with the way VOF approach is implemented, it is not possible to simulate real vacuum (or low density plasma), as density ratio should not be too extreme for VOF to work properly. Using low density values in the gas also leads to a decrease in the time step, which, in turn, increases computational cost. Therefore, to mimic the vacuum from electromagnetic point of view, the following is done: (i) the initial hydrodynamic pressure in the gas region is set to a sufficiently low value such that its effect on liner trajectory is negligible, and (ii) the magnetic field in the gas region is prescribed by an external procedure or by using a high value of magnetic diffusivity (the magnetic diffusivity of vacuum is infinite).
In the first verification test, a toroidal field in the vacuum (gas) region is instantaneously produced by the electrical current (driven by the external power supply) that runs through the conducting shaft placed in the center of the cylinder. The external power source is then disconnected. With such a setup, a total toroidal flux in the system (vacuum and liquid liner) remains constant. At the start of the simulation, a toroidal magnetic field is present only in the vacuum (gas) region, starting then to diffuse into the liquid liner. The exact amount of the initial toroidal flux that diffuses into the liner during implosion depends on the compression time and trajectory. During the implosion, the toroidal field also gets compressed, leading to the increase in the magnetic pressure acting on the liner, which in turn alters the compression trajectory.
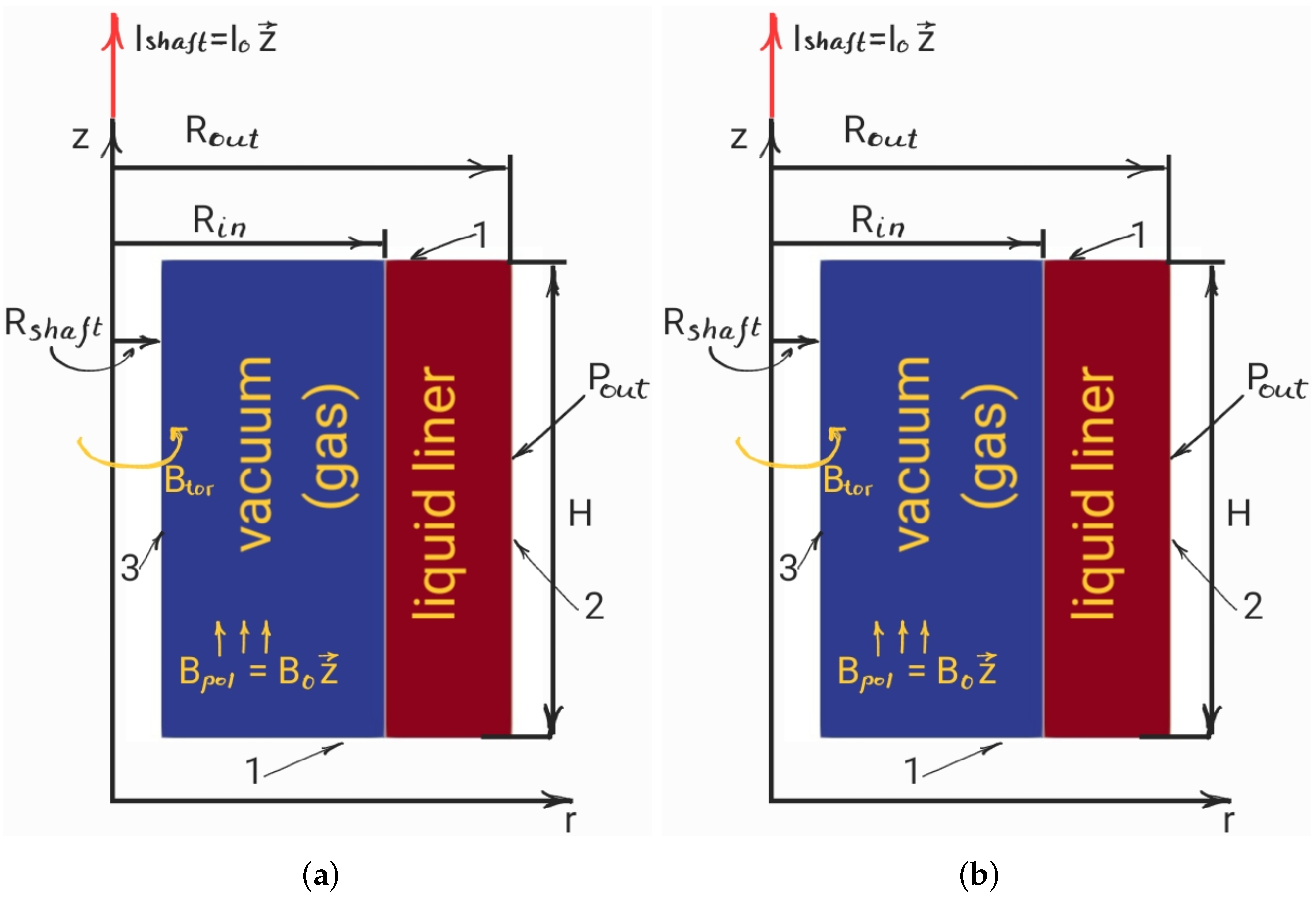
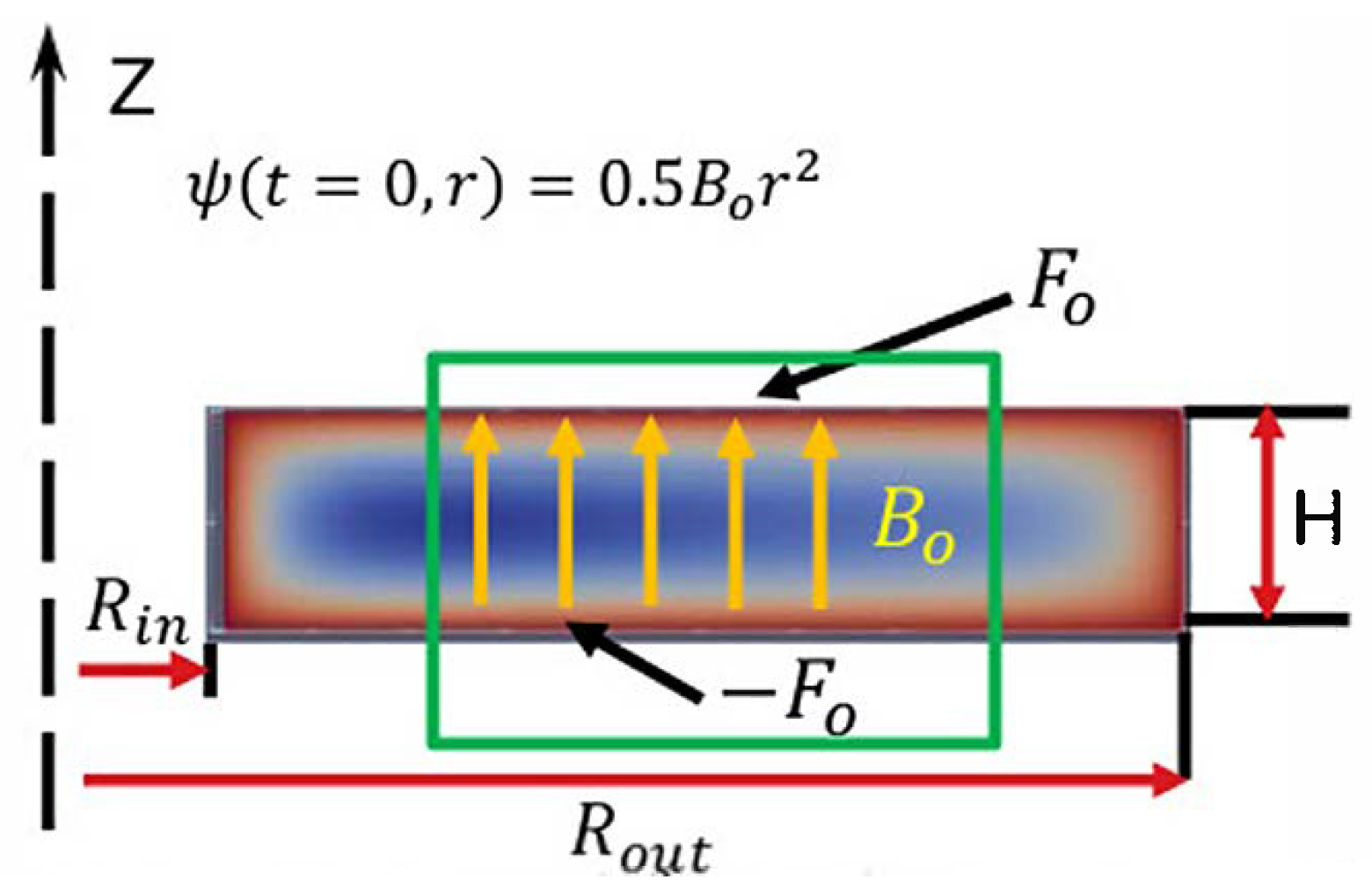
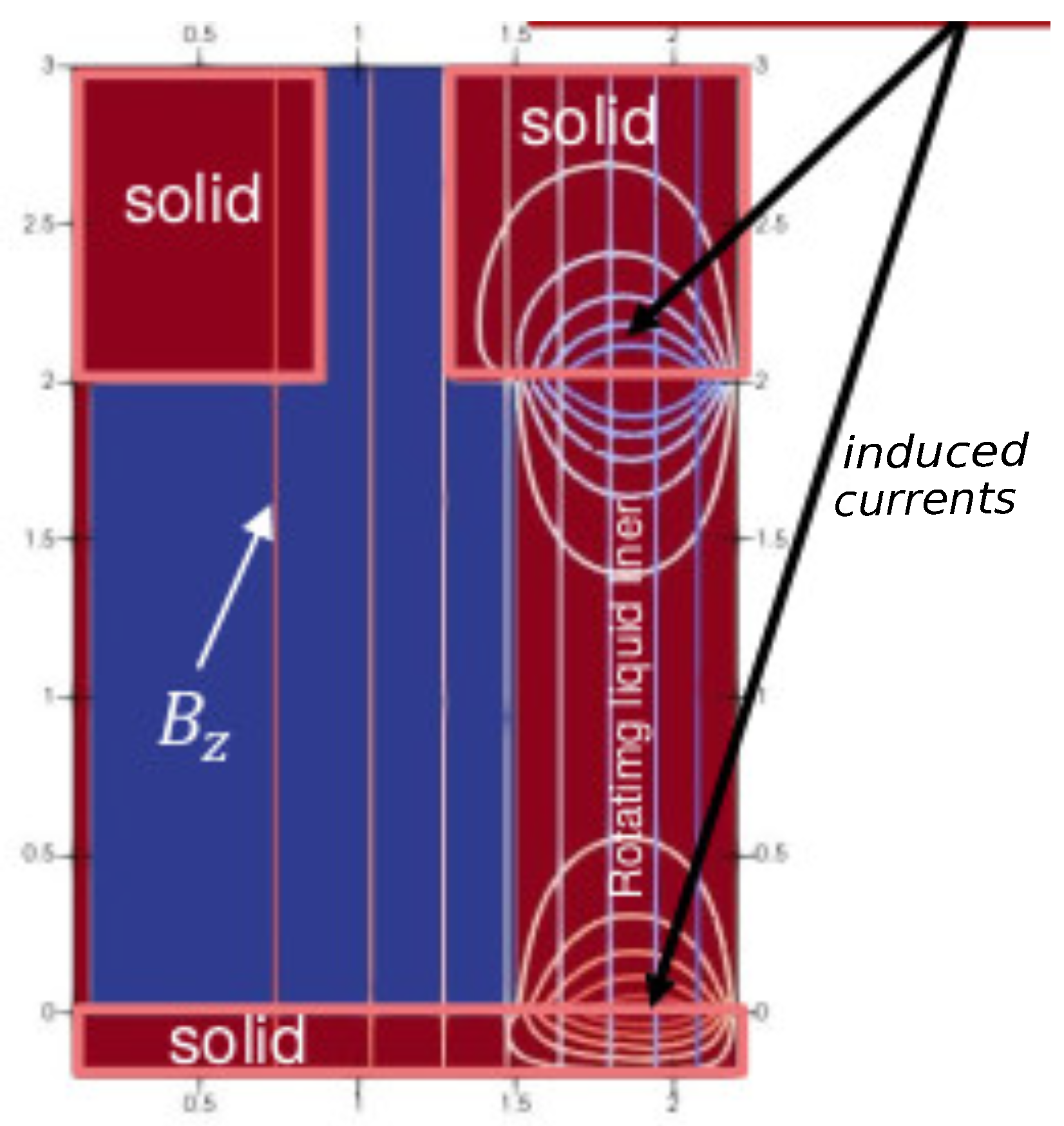
A cross-section of the computational setup used for the cylindrical compression of vacuum magnetic fields test cases is shown in
Figure 3. To simulate 2-dimensional axisymmetric cases in OpenFOAM, the geometry is specified as a
wedge of small angle (
in this work) and 1 cell thick running along the plane of symmetry. Front and back
wedge planes must be specified as separate patches of
wedge type (see OpenFOAM documentation [
6] and reference [
29] for more details). Position of the central shaft and direction of the electrical current
are shown in the figure (
Figure 3a) along with a direction of generated by the shaft current toroidal magnetic field
. Direction of the uniform vertical magnetic field
(for the poloidal field compression test case discussed later) is also shown in
Figure 3a). The initial position and geometry of the liquid liner and vacuum (gas) cavity are shown by red and blue colors, respectively, in
Figure 3a. Inner boundary of the computational domain marked by number “3”, corresponds to the central shaft with radius
. No-slip wall boundary condition is imposed at this boundary. At top and bottom boundaries, marked by “1” in
Figure 3a, a slip wall boundary condition is used. At the outer boundary (marked by number “2”), a pressurized pushing gas causing liner implosion is prescribed as pressure profile
, that is constant for this test case. Zero-gradient boundary condition is specified for toroidal function
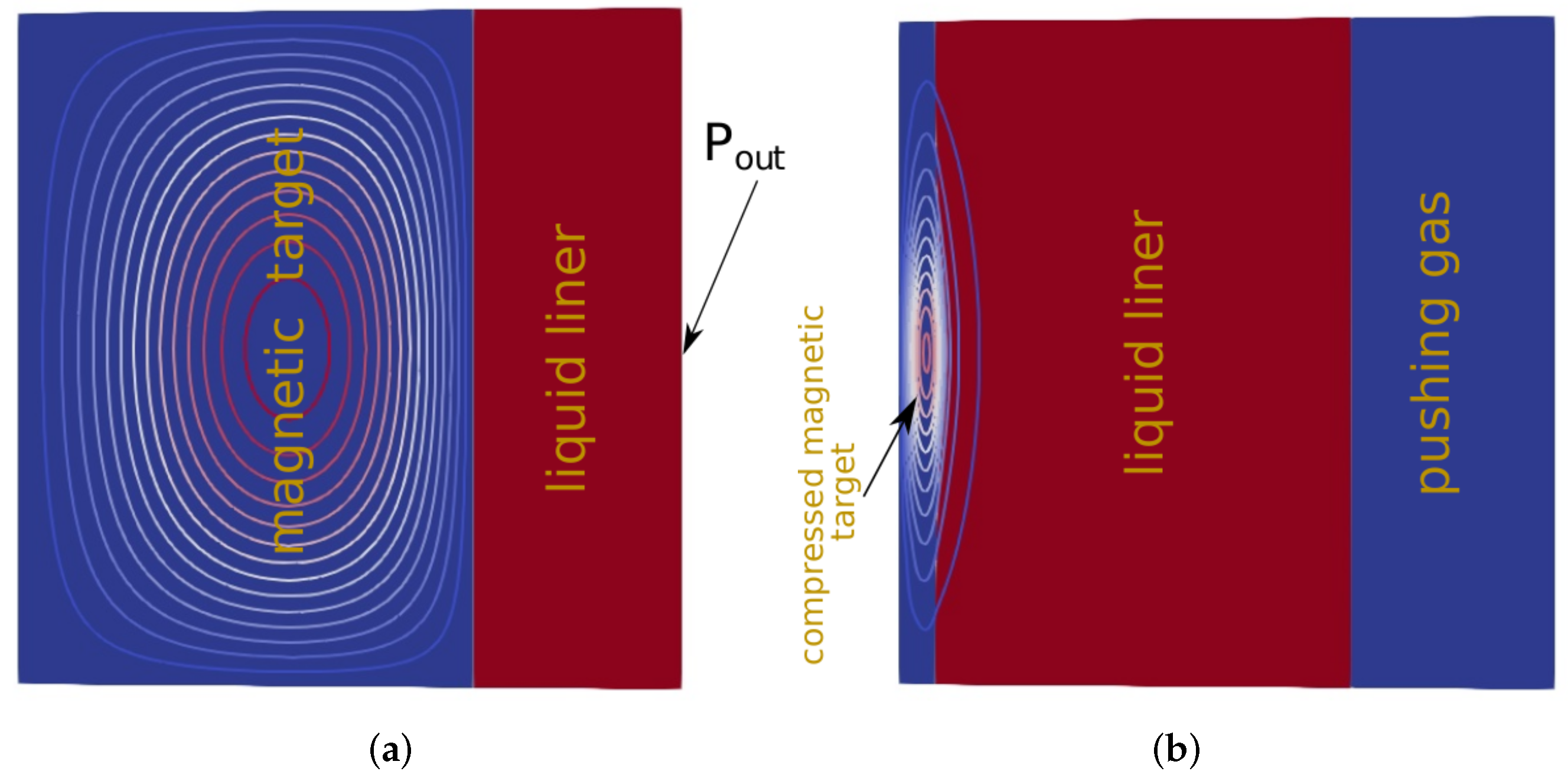
F at all boundaries. Physically, this corresponds to boundaries with perfect electric conductivity and results in conservation of total toroidal magnetic flux inside computational domain.The instant when the toroidal magnetic field is highly compressed and the liquid liner is near its turnaround point is shown in
Figure 3b. As mentioned earlier, a low pressure gas is also initially present in the cavity (in addition to the toroidal magnetic field), but the parameters are chosen in such a way that the effect of the magnetic field on the liner trajectory is a dominant one.
For this first verification case, the toroidal magnetic field (represented by the toroidal function
) is calculated by an external procedure using conservation of the total toroidal flux. Hence, the toroidal function
F in the gas region is overwritten at each time step, while Equation (
3) is solved in the liquid. The test case parameters are also chosen to ensure that the magnetic field is not diffused through the entire thickness of the liquid liner during the implosion such that no magnetic flux exiting through the outer liner surface.
The procedure for calculating the toroidal function
in the gas cavity is detailed below. The initial toroidal flux
is given by:
where
is the initial shaft current,
is the initial inductance of the gas cavity, and
is the vacuum permeability. The relation between the initial shaft current and the initial value of toroidal function in the gas cavity is given by (according to the Biot–Savart law):
Using Equations (
14) and (
15), the initial toroidal flux
can be calculated as:
Once the magnetic field starts diffusing into a liquid liner, the total conserved toroidal flux consists of that in the gas cavity and that in the liquid liner:
where the first integral is calculated over the volume occupied by the gas cavity and the second one is over the volume of the liquid liner. Thus, the value of
at any given time
t can be calculated from Equation (
17) as:
The simulation procedure can be summarized as follows:
Step 1: For a given initial shaft current
and size of the gas cavity, calculate the initial value of the toroidal function in the gas
by Equation (
15) and the initial toroidal flux
by Equation (
16).
Step 2: Perform one iteration with “mhdCompressibleInterFoam”.
Step 3: Calculate an updated value of the toroidal function in the gas
by Equation (
18).
Step 4: Overwrite the toroidal function F for all the grid cells inside the gas cavity with the value calculated in Step 3.
Step 5: Repeat steps 2 to 4 for the duration of the simulation.
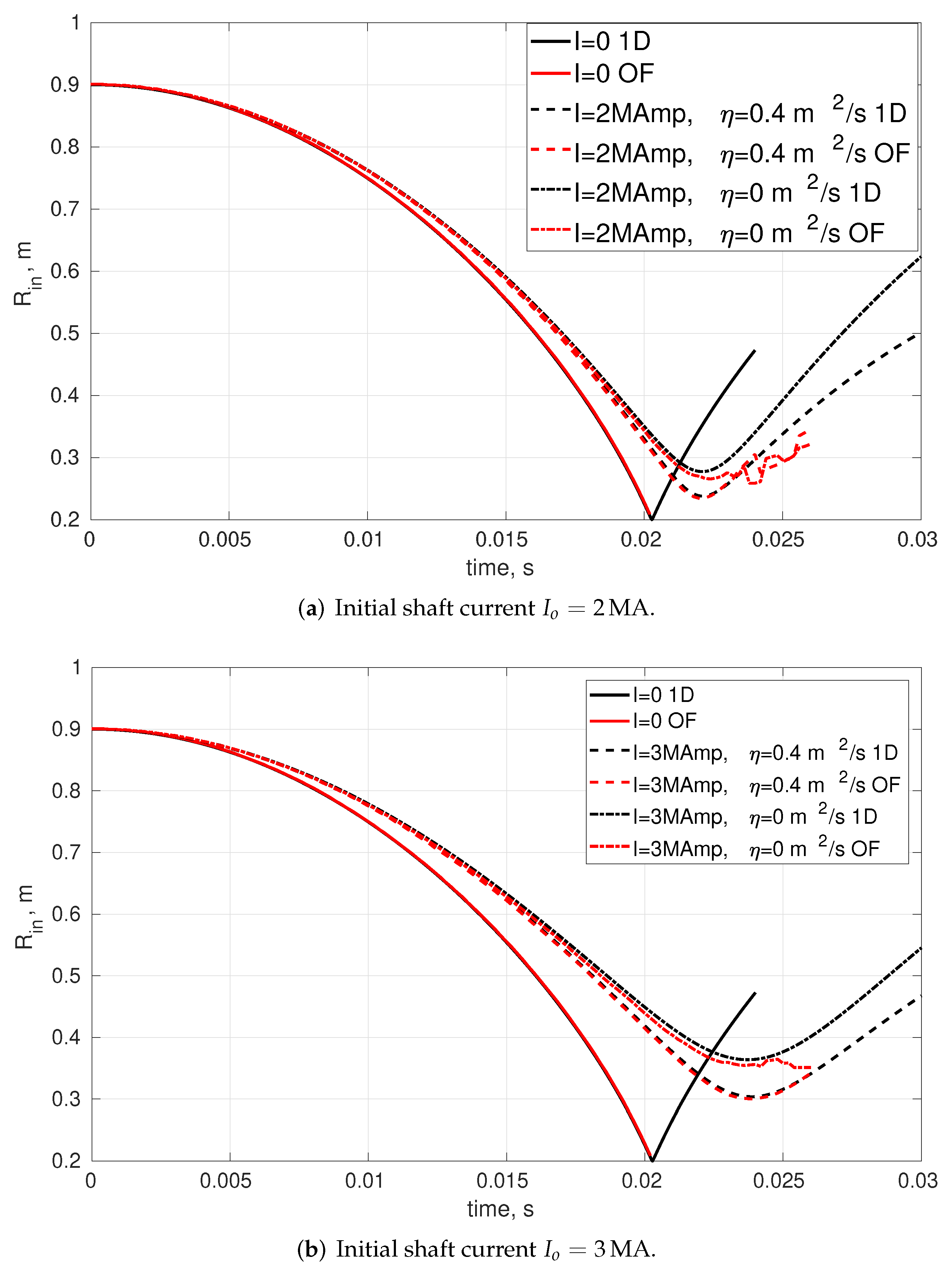
Examples of inner liner surface trajectories obtained with the above prescribed procedure are given in
Figure 4. The following set of parameters has been used for those simulations: initial radius of the inner liner surface
m, initial radius of the outer liner surface
m, cylinder height
, central shaft radius
m, constant pushing pressure
Pa, initial gas cavity pressure
Pa, and constant liner density of
. Structured orthogonal mesh has been used with a uniform
mm grid resolution in the radial direction. In the azimuthal direction,
mm grid resolution has been imposed at the radius of the initial inner liner surface. Isothermal calculation has been run, i.e., all liquid phase properties (including magnetic diffusivity) have been held constant throughout the simulation. For the gas phase, this implies isothermal compression. Here, it is worth reiterating that for this test case, the dynamics of the gas is not of an interest, provided that gas has a negligible effect on the liner trajectory. What is of interest is the effect of the toroidal magnetic field on the liner trajectory and the amount of the magnetic flux diffused into the liner during implosion.
In
Figure 4a,b, results are shown for the initial shaft currents of
MA and
MA, respectively. Two sets of curves (dashed and dash dot) corresponding to the two values of magnetic diffusivity (
and
) are plotted for each value of the initial shaft current. Also plotted by the solid line is a trajectory obtained in a pure hydrodynamic simulation, i.e., for a zero value of the shaft current (
). Results obtained with the newly developed solver “mhdCompressibleInterFoam” are shown by the red lines and the ones obtained with in-house 1D code are shown by the black lines. (Description of the in-house 1D code is provided in
Appendix A. Equations describe only dynamics of the liner with pushing pressure and cavity pressure are used as boundary conditions. Gas cavity pressure is recalculated based on the inner liner surface position assuming adiabatic (or isothermal) compression. Toroidal function in the gas
is calculated from total toroidal flux conservation the same way is in “mhdCompressibleInterFoam”).
One can see that with no magnetic pressure acting on the liner (solid lines in
Figure 4), it implodes faster, goes deeper into compression, and is characterized by a sharp rebound occurring close to the central shaft. Results obtained with “mhdCompressibleInterFoam” (that reduces to the original “compressibleInterFoam” solver for the case of
) are in good agreement with those produced with our in-house 1D code during the entire implosion phase. As in this case, the liner comes close to the shaft, capturing rebound using OpenFOAM is challenging, as it requires fine resolution and small times steps. Hence, the OpenFOAM simulation is limited to the imploding stage only.
By examining the trajectories obtained with toroidal magnetic field in the gas cavity, one can observe the following: (i) with an increase in the magnetic field strength, the liner turn around radius increases for the same value of magnetic diffusivity, (ii) for a higher value of magnetic diffusivity, the liner goes deeper into a compression as some portion of the magnetic flux diffuses into the liner reducing overall magnetic push-back, (iii) there is a good agreement between “mhdCompressibleInterFoam” results and the in-house 1D code until the turnaround point for all cases. It can also be noticed that for the case of zero magnetic diffusivity (dashed lines), there is a slight deviation between “mhdCompressibleInterFoam” and 1D code. This happens because even when the magnetic diffusivity is set to zero, some magnetic flux getting diffused into the liner due to the numerical diffusion. Finally, we should emphasize, that with the current numerical setup, it is not always possible to run the simulation much longer beyond the turn around point. This happens because during the rebound stage, the magnetic field in the liner close to the inner surface might become higher than in the gas cavity. This might put liquid under tension and cause delamination of the inner liner surface [
35]. Mechanism of the liner surface delamination is not captured correctly at present, as it requires a cavitation model and addition of the third phase (cavitated liquid) into simulation. This is outside the scope of the current work, whose primary goal is to simulate liner implosion up-to the turn around point.
The second verification case is an extension of the first one, where a uniform vertical magnetic field is also present in the gas cavity at the start of the simulation. The computational setup is the same as in the previous case and is shown in
Figure 3. A vertical uniform poloidal field is initially present only in the gas cavity, it then diffuses into a liquid liner and also gets compressed during the liner implosion similar to the case with a toroidal magnetic field. For a uniform vertical poloidal magnetic field
, a poloidal flux function
is of a form
, where
and
are constants. The initial distribution of the poloidal flux function in the gas cavity
is then prescribed as:
where
is the value of the poloidal flux function at the shaft,
is the strength of the uniform vertical poloidal field,
and
are the initial radii of the inner liner surface and the central shaft, respectively. In this verification test, the equations for the evolution of magnetic field (Equations (
3) and (
4)) have been solved in both gas and liquid regions. Here a high value of magnetic diffusivity inside the gas is used to mimic vacuum. This is instead of using an external procedure to calculate magnetic field in the gas region, as it has been done in the previous verification test. At the inner boundary
(marked by “3” at
Figure 3a), a zero gradient boundary condition is imposed for the toroidal function
F (superconductor shaft) and a fixed value of
for the poloidal flux function. As in the previous test case, it is assumed that the magnetic field does not reach the back side of the liner, hence
and a zero gradient is prescribed for
F at the outer
boundary. Zero-gradient boundary condition is imposed at top and bottom boundaries (marked by “1” at
Figure 3a) for both toroidal function
F and poloidal flux function
. Several tests with different values of magnetic diffusivity in the gas have been carried out and the results have converged to those obtained with using an external procedure to calculate the magnetic field in the cavity for the values of magnetic diffusivity
.
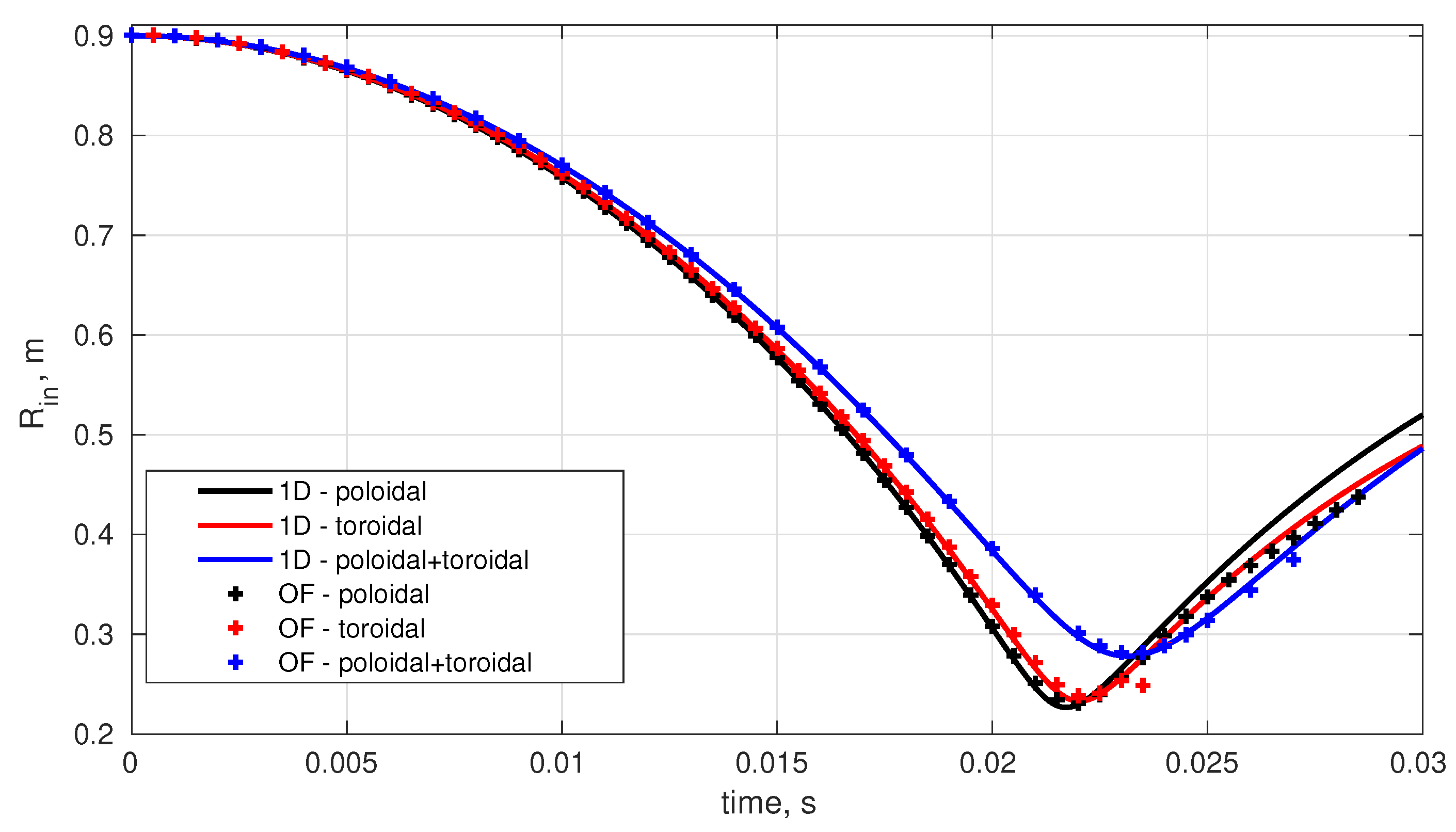
Trajectories of the inner liner surface during the compression of poloidal, toroidal and combination of both are shown in
Figure 5. Results obtained with “mhdCompressibleInterFoam” are shown by the symbols, whilst those obtained with the in-house 1D code (see
Appendix A for the details) are plotted by the solid lines. Case parameters are similar to the first verification test;
m,
m,
m,
,
Pa,
Pa,
,
,
. Black, red and blue curves correspond respectively to (i)
T,
, (ii)
,
MA and (ii)
T,
MA cases. First of all, one can see that for all three cases, there is good agreement between the results obtained with “mhdCompressibleInterFoam” and those of 1D code during the implosion phase. For a chosen set of parameters, effects of poloidal only (black) or toroidal only (red) vacuum fields on the liner trajectory are similar. When combined (blue), the liner’s turnaround radius increases, the time it takes to reach a turnaround point also increases and the turnaround is more gradual.
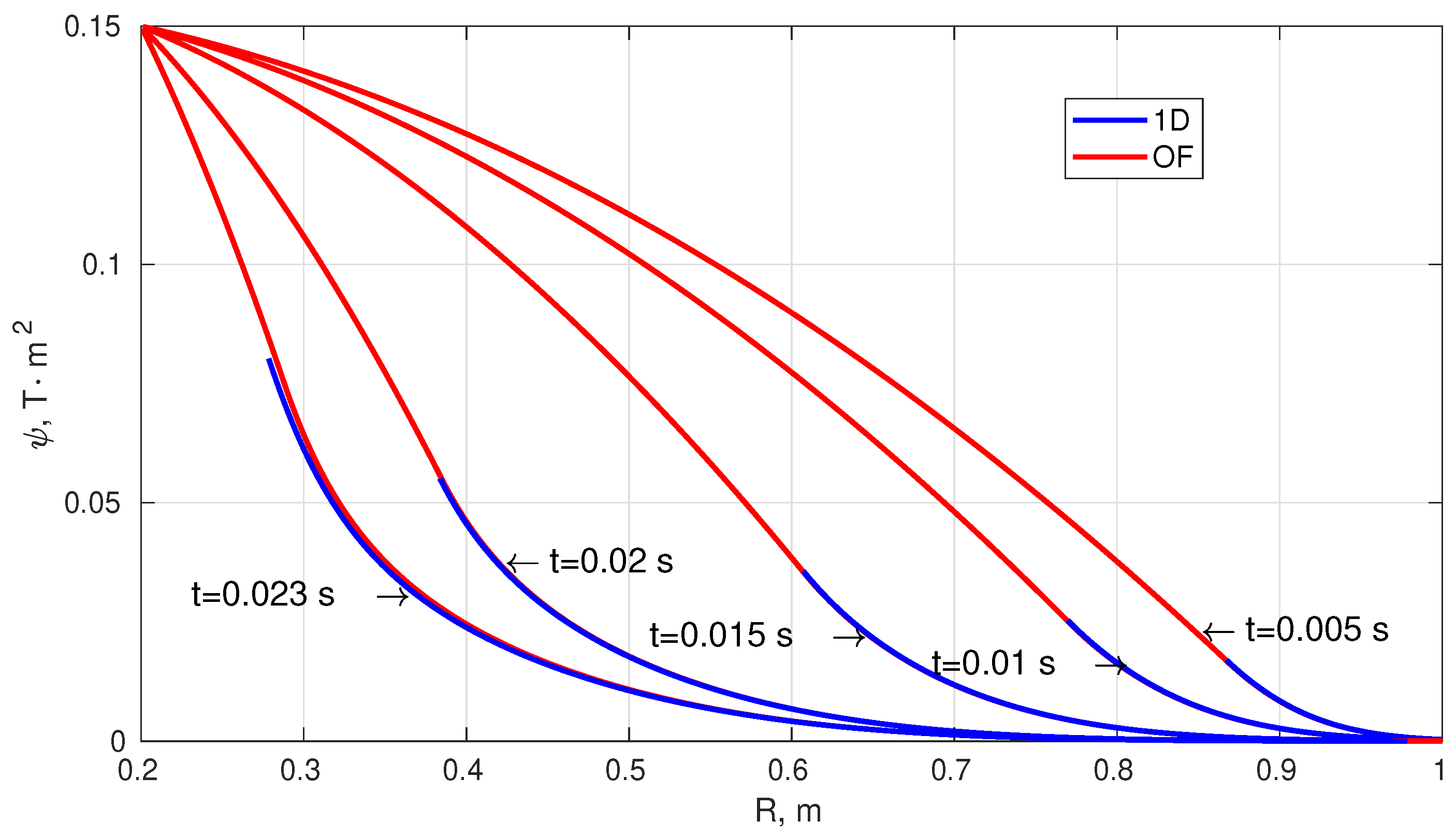
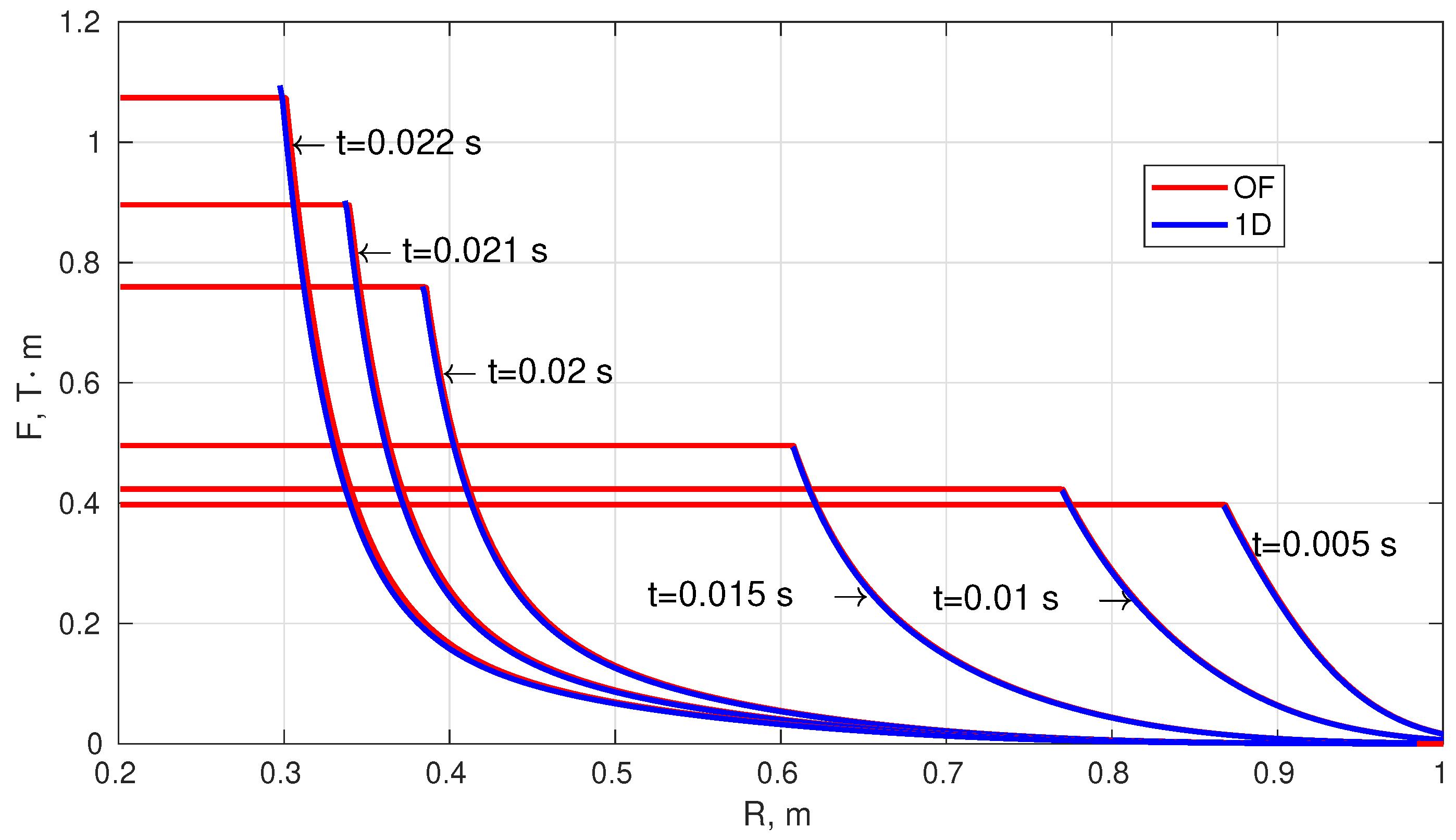
Radial profiles of the poloidal flux function
and toroidal function
F at several times during the compression are shown in
Figure 6 and
Figure 7 for the case where the poloidal and toroidal vacuum magnetic fields are initially present in the cavity (case is shown by the blue line in
Figure 5;
T,
MA). Results obtained with “mhdCompressibleInterFoam” solver are shown by the red lines and those obtained with 1D code by the blue ones. MHD equations are solved in both liquid liner and gas cavity region with “mhdCompressibleInterFoam” solver, whereas the 1D code solved only the dynamics of the liquid liner. “Ends” of the blue lines correspond to the radial position of the inner surface of the liner at different times; it can be seen that they correlate with the points on the blue curve in
Figure 5 at those times. The latest time for which profiles are shown, is about the liner turnaround point. Diffusion of both toroidal and poloidal magnetic fields into the liquid liner is clearly seen, and there is good agreement between “mhdCompressibleInterFoam” and in-house 1D code for the magnetic field profiles inside the liner. In the gas cavity region, a parabolic profile of the poloidal flux function
corresponding to the uniform vertical field, can be also seen at all times presented. A constant value of the toroidal function
F in the gas cavity, which increases as the toroidal field gets compressed, is clearly seen in
Figure 7. It is also worth reiterating, that for a given set of parameters, the magnetic field has not diffused through the entire thickness of the liquid liner, such that no magnetic flux leaves through the outer liner surface during the implosion.
Finally, we would like to mention, that a number of grid convergence tests have been run for the presented test cases. Grid cell size was varied between and . The effect of the time step has been also studied. Main outcome of these studies is that pretty high resolution grid is required to obtain a converged solution for the diffusion of magnetic field into the liner, especially for the small values of magnetic diffusivity. Even finer resolution is required to accurately resolve thermal layer (due to Ohmic heating) in the liquid liner if it is of interest. To achieve grid independent results, a higher grid resolution is required compared to the pure hydrodynamic simulations of imploding liner. A grid with square cells has been found appropriate for our problems of interest. Running simulations on structured meshes with square cells (as much as possible) and keeping a time step small and nearly constant during the simulation was unsurprisingly found to lead the best results.
3.1.2. Hartmann Annular Flow
In this section the “mhdCompressibleInterFoam” solver is validated against an analytical solution for a Hartmann Annular Flow. Hartmann annular flow is an extension of a classical MHD Hartmann flow benchmark problem [
36] to the case of an annular channel with a rectangular cross-section [
37], see a schematic of a computational setup in
Figure 8. Geometry of the test case is defined by the inner and outer radii of the annular channel
and
, respectively, and by the height of the channel
H. A channel is filled with an electrically conducting fluid which is initially at rest. A non-slip boundary condition is applied at all walls of the channel. A vertical uniform magnetic field
acting on a fluid is imposed through the boundary condition on the poloidal flux function (per radian)
;
—at the inner wall,
—at the outer wall,
— at the bottom and top walls. The initial poloidal field can be either imposed at the start of the simulation (to speed up reaching the steady-state) or let it to diffuse from the boundaries as simulation progresses. To induce a poloidal current, a fixed value boundary condition for a toroidal function
F is applied at the top and bottom walls as:
and
. A zero gradient boundary condition for
F is applied at the inner and outer radii walls (superconductor).
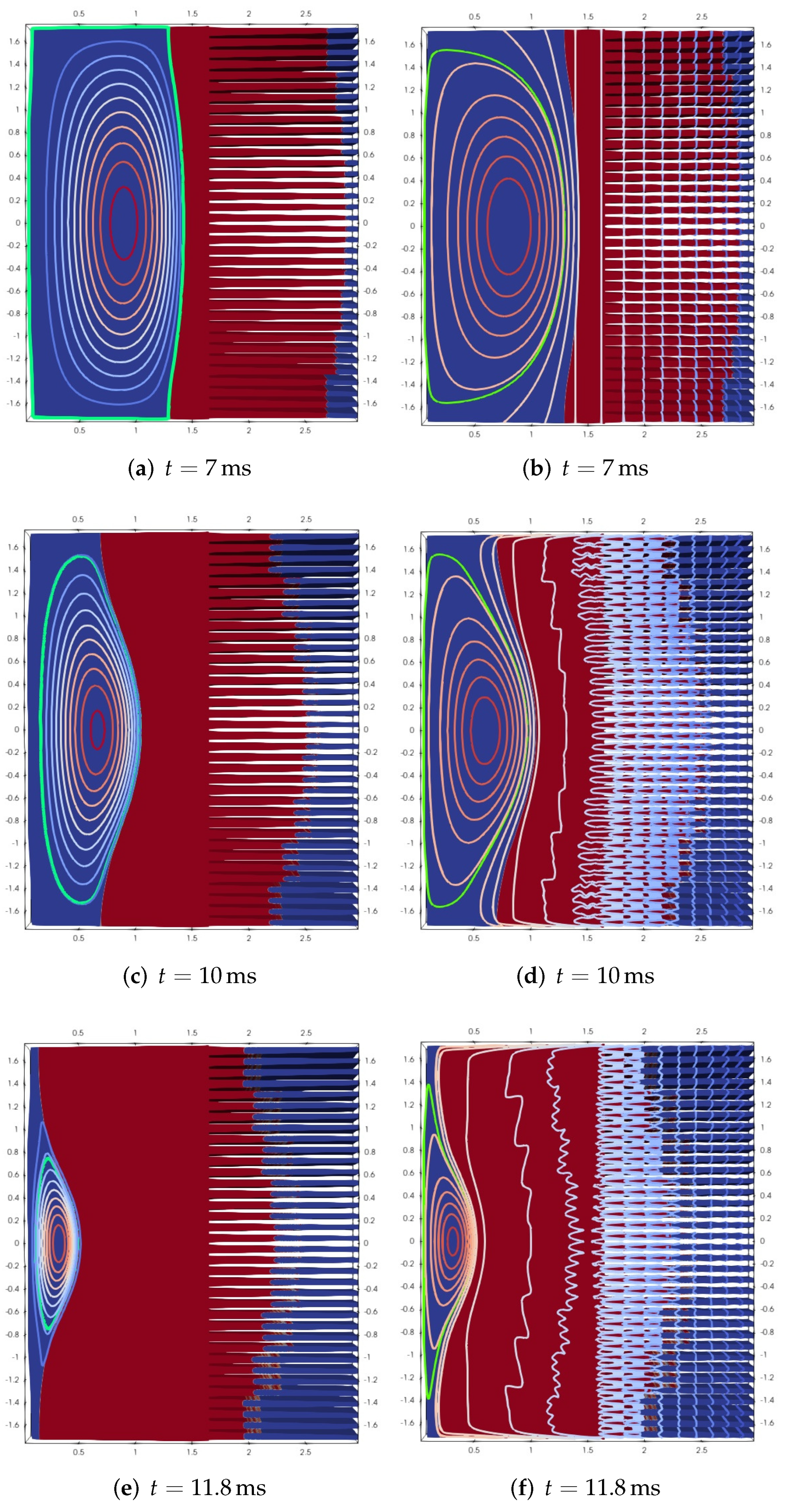
With such a setup, an electrically conductive fluid starts to swirl inside the channel due to the Lorentz force (in particular due to the third term in Equation (
6)) and eventually reaches a steady state when balanced by the viscous forces. An example of swirling velocity contours at the channel cross-section is shown in
Figure 8, where magnitude of the swirling velocity varies from the maximum (dark blue) inside the channel to zero (red) at the wall. In the middle section of the annular channel, away from the inner and outer radii walls (schematically indicated by the green rectangular in
Figure 8), this flow problem can be analytically solved for a steady state. In this central region the laminar steady state flow is described by the following equations (see [
37] for details):
where
is an angular momentum,
F(
z) is the toroidal function,
is the strength of the uniform vertical magnetic field,
is magnetic diffusivity,
is vacuum permeability,
and
are density and kinematic viscosity of the fluid. For the case of an annular channel entirely filled with liquid, the above system is solved with the following set of boundary conditions:
The shapes of the angular momentum
L and toroidal function
F profiles depend on the Hartmann number that is defined as:
The Hartmann number represents the ratio of electromagnetic and viscous forces, hence, depending on the value of number, a flow regime is dominated by the viscous forces (low ) or by electromagnetic forces (high ).
Validation tests have been carried out for the following set of parameters:
m,
m,
m,
,
,
,
and three different strengths of the vertical uniform magnetic field
,
and
. For those parameters, the corresponding test cases Hartmann numbers are
, 11 and 22. Steady state laminar flow simulations have been run on a computational grid with square cells at different resolutions. Grid convergence has been confirmed and the results obtained for the grid with
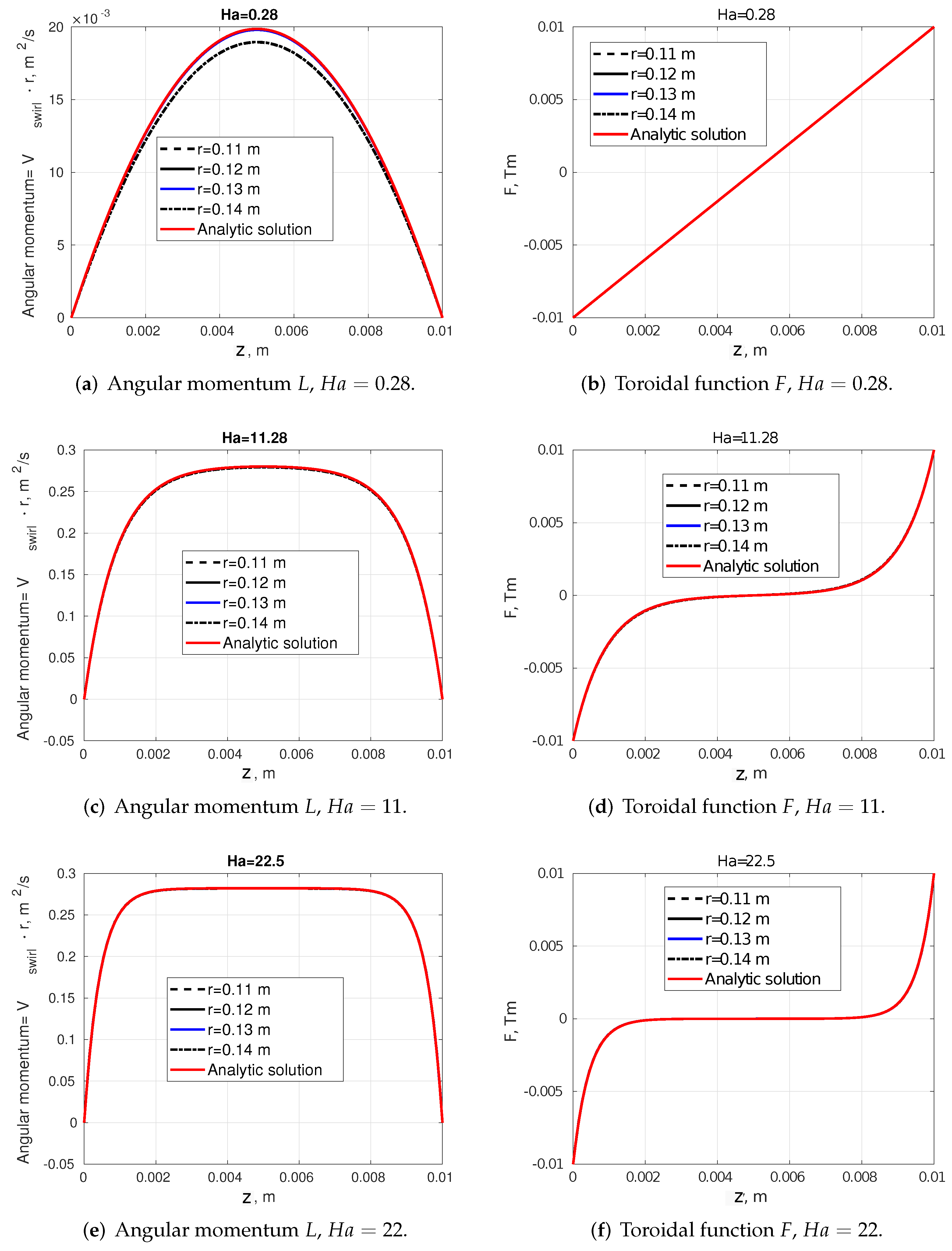
cell size are presented below. Vertical angular momentum and toroidal function profiles at several radial positions (away from the inner and outer walls) along with analytical solution obtained by solving Equation (
20) with boundary conditions given by Equation (
21) are plotted in
Figure 9 for different Hartmann numbers. Analytical solutions have been obtained for the same set of parameters used in numerical simulations, i.e., units of measurement for individual physical quantities are identical to those used in simulations.
First of all, one can see, that there is an excellent agreement between the results obtained with the “mhdCompressibleInterFoam” solver and the analytical solution for all the test cases. A slight deviation from the analytical solution is observed for the angular momentum profile plotted at the radial position of at Hartmann number (part a). This is likely because viscous forces dominate this regime, and the influence of the outer radius wall extends to that radial position. As it can be expected, at a low Hartmann number, the velocity exhibits a parabolic shape profile and the poloidal electrical current (proportional to ) is uniformly distributed through out the channel. With the increase in Hartmann number, development of the Hartmann layers near the top and bottom walls is clearly observed and the velocity profile changes from the parabolic to the flat top shape. Hartmann layers become thinner with a further increase in Hartmann number such that electrical currents are concentrated inside those thin layers near the top and bottom walls, whereas the central part of the channel is electrical current free (area of constant toroidal function F).
3.1.3. Compression of Magnetic Target in a Cylindrical Geometry
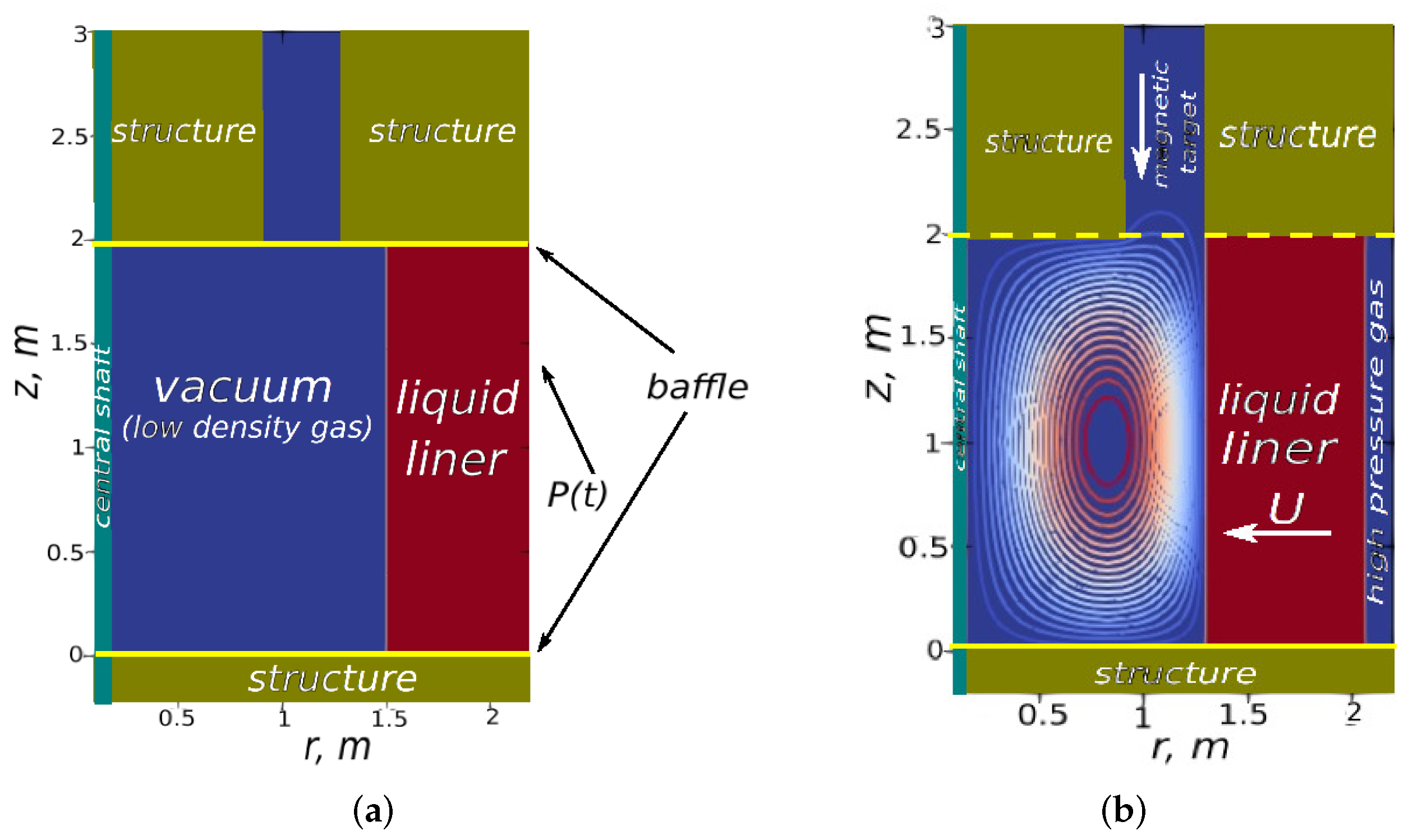
In this section a more complex verification test for the compression of a simplified magnetic target is discussed. Results of an axisymmetric compression simulation of a simplified magnetic target by an imploding liquid metal liner driven by a pressurized gas in a cylindrical geometry are presented and compared to those obtained with VAC code. A schematic of the initial simulation setup is shown in
Figure 10a, while a highly compressed target is shown in
Figure 10b. Parameters for this test case have been chosen within the range relevant to General Fusion’s FDP. Geometry of the test case is defined by the radii of inner
and outer
liner surfaces, radius of the central shaft
and height of the cylinder
H.
Magnetic target to be compressed is specified as an initial condition in terms of the poloidal flux function per radian
and toroidal function
and is calculated as a solution of Grad-Shafranov (GS) equilibrium equation [
39,
40] given by Equation (
23). For a rectangular cross-section and pressure and toroidal function profiles given by Equation (
24), Grad-Shafranov equation can be solved analytically (as detailed below).
where
is the magnetic permeability,
is the pressure and
is a toroidal function. The nature of the equilibrium is mainly determined by the choices of the two functions
and
as well as the boundary conditions. Here it is assumed that:
where
and
are some constants. Here
corresponds to the value of the initial central shaft current
and pressure is assumed to be constant and equal to
. Substituting Equation (
24) into Equation (
23) leads to a specific form of Grad-Shafranov equation:
with boundary condition of
at all boundaries of the domain. A rectangular cross-section initially occupied by the magnetic target, is constrained by the central shaft radius
, initial radius of the inner liner surface
, bottom wall
and top wall
(see
Figure 10a). General solution to Equation (
25) is:
where
and
are Bessel functions. Radial wave-number
k and amplitude constants
a and
b are determined from boundary and initial conditions. For given radii
and
, wave number
k is determined from boundary condition (
at
and
) using:
Then full solution is:
where
c in an amplitude constant determining the maximum poloidal flux.
Parameters for the verification case are given below in
Table 1. Following assumptions have been made: laminar flow, incompressible liquid liner, constant magnetic diffusivity (different values for gas and liquid regions) and, for simplicity, iso-thermal. Viscosity in the gas region has been set to an artificially high value in order to damp waves bouncing inside the cavity during compression. Simulation has been run on an uniform computational grid with
mm cell size. Simulation has been run for the set of boundary conditions (see
Figure 3 for notation): non-slip wall at the inner boundary (
), slip wall boundary condition at top and bottom walls (
and
), prescribed pressure at the outer boundary (
, fixed value of
and zero-gradient for
F at all boundaries).
Evolution of the magnetic field during the compression obtained with “mhdCompressibleInterFoam” solver is compared to that obtained with “layered VAC” code for the same set of parameters and physical models. “Layered VAC” code is in-house modified version of VAC code, which allows to simulate a layer of liquid metal in addition to the plasma region. Current limitation of compression simulations with VAC code is that the trajectory and shape of the liner should be known in prior (usually from hydrodynamic simulation), which then used as a moving boundary for VAC. In the “layered VAC”, the velocity field in the liquid liner layer is also provided as an input to the simulation. This allows to examine diffusion of the magnetic field into the liner during compression. With such a numerical setup we can compare evolution of the magnetic target and diffusion of the magnetic field into the liner between the two codes. What it is not possible to compare, is the effect of the magnetic field on the trajectory of the liner, as it has to be prescribed in VAC simulation.
Simulation with “layered VAC” code has been run on a structured non-uniform grid; grid resolution at the plasma-liquid metal interface is
mm (the same as for “mhdCompressibleInterFoam” solver) and is much coarser for the rest of the domain (
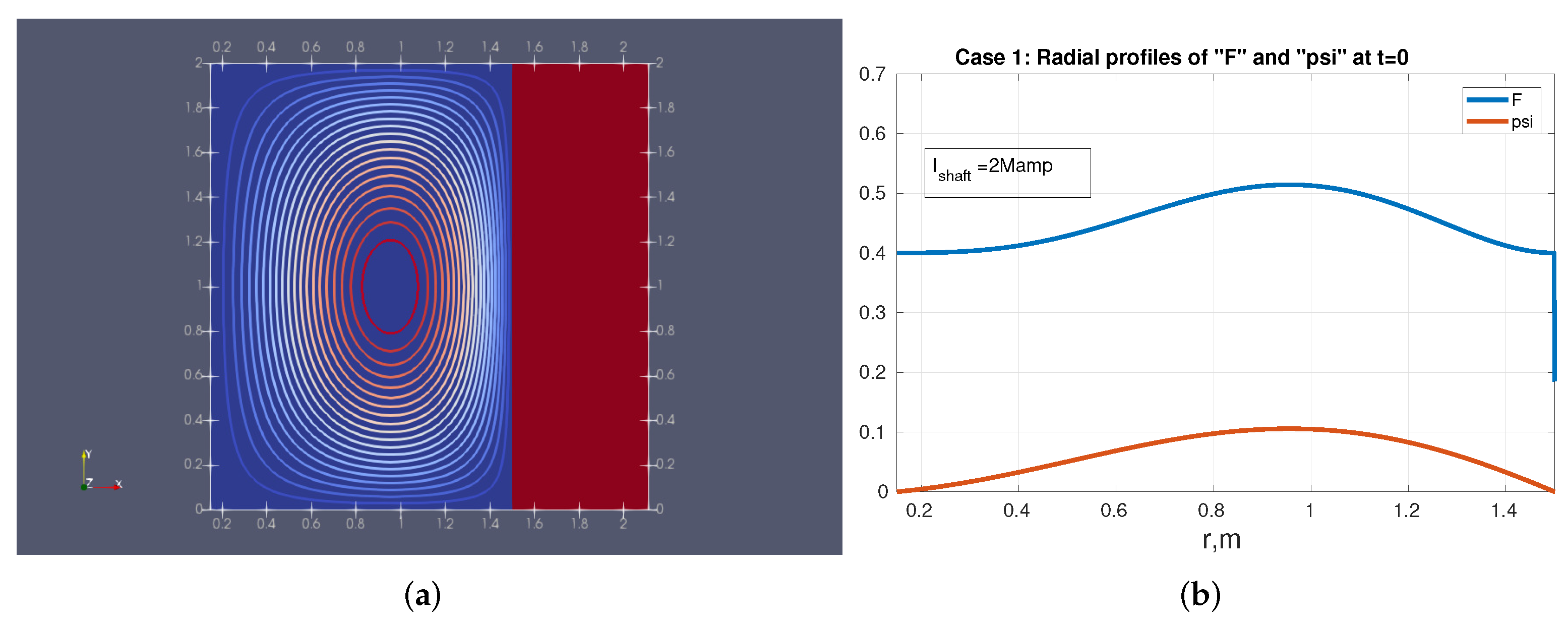
cm). Both codes have been run for identical set of parameters and physical models but viscosity in the gas. Inviscid fluid model is used in VAC simulation, whereas in “mhdCompressibleInterFoam”, high viscosity is set in the gas region. Initial condition is shown in
Figure 11a, where magnetic target is plotted by the contours of the poloidal function
. Initial radial profiles of the poloidal function
and toroidal function
F at the equator (
) (Equation (
28) with parameters in
Table 1) are shown in
Figure 11b.
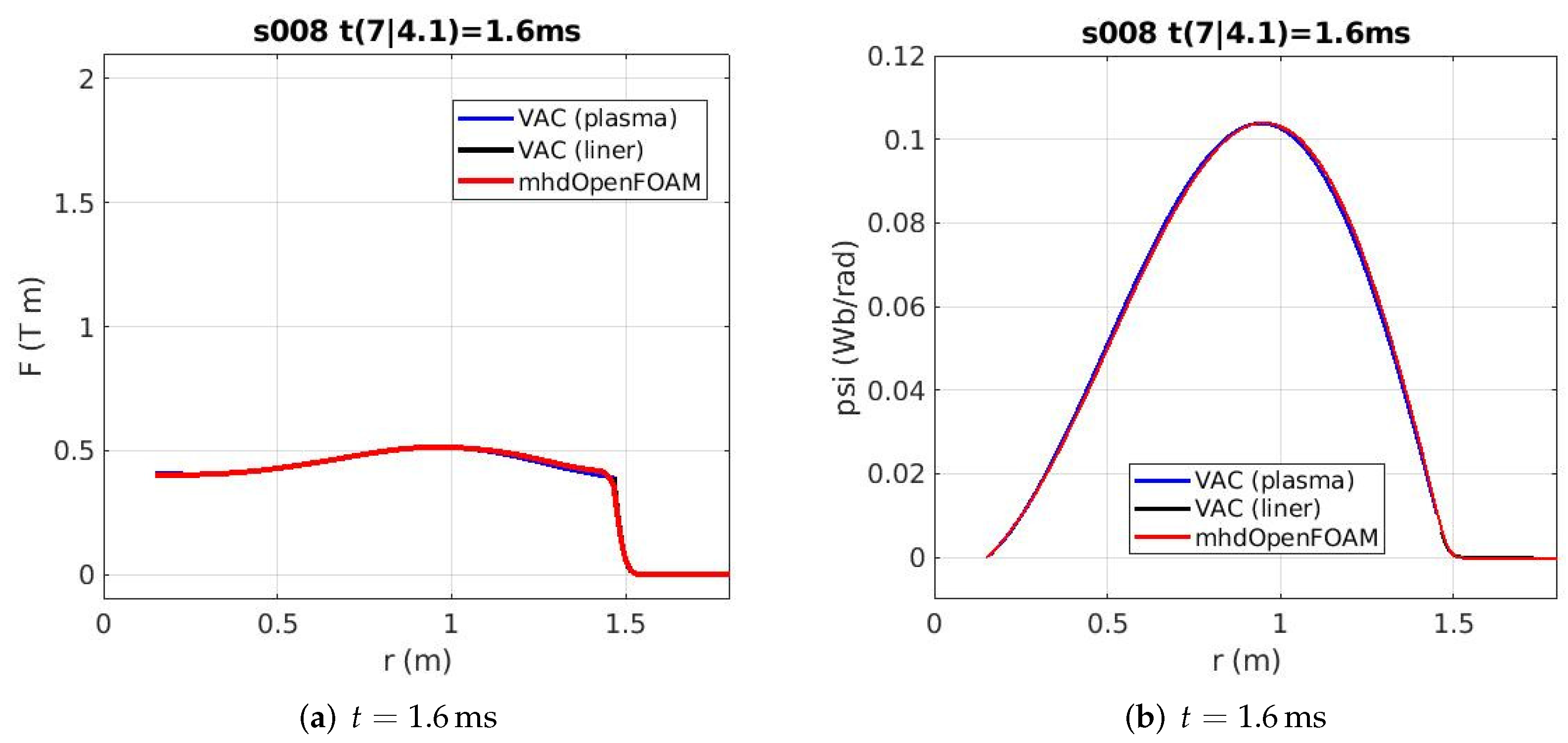
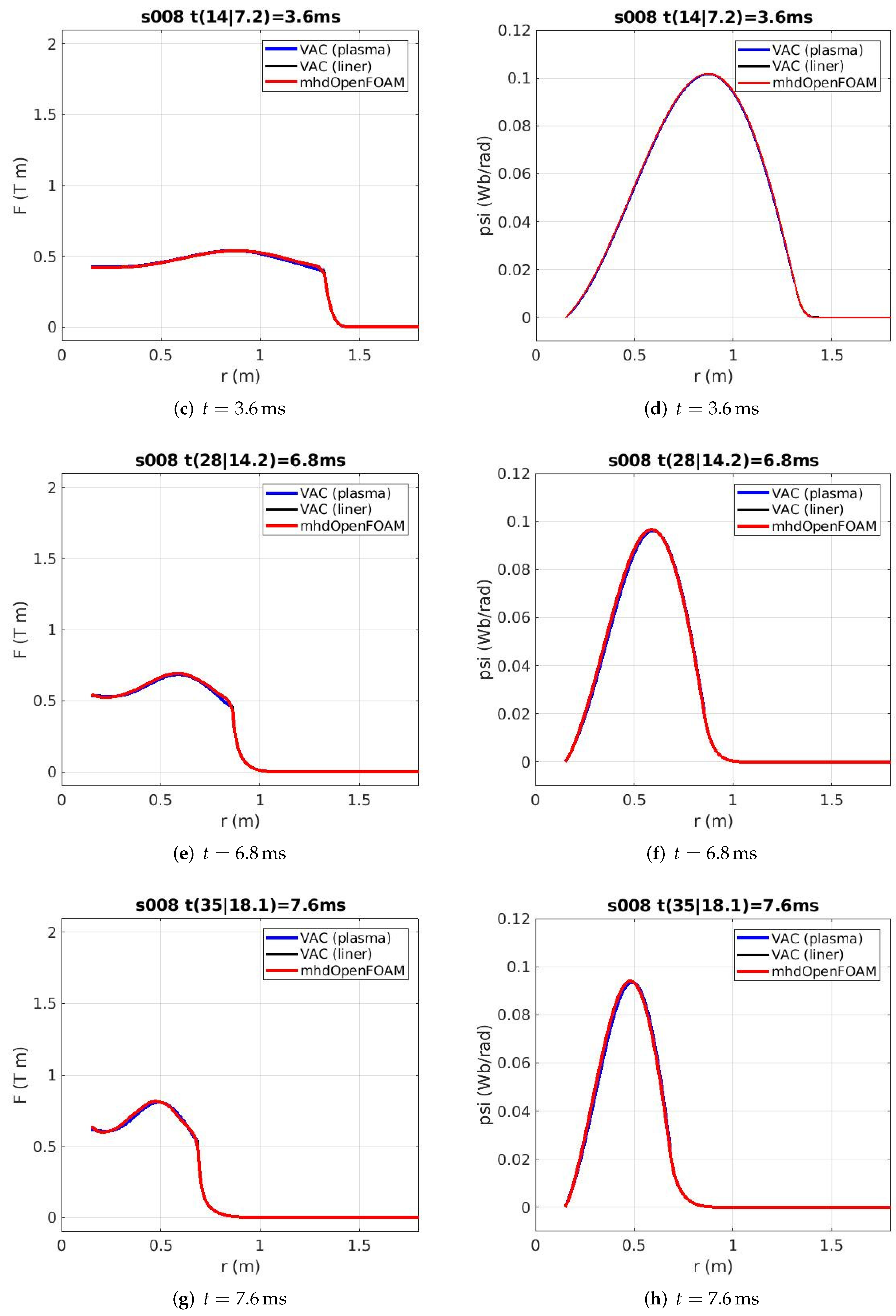
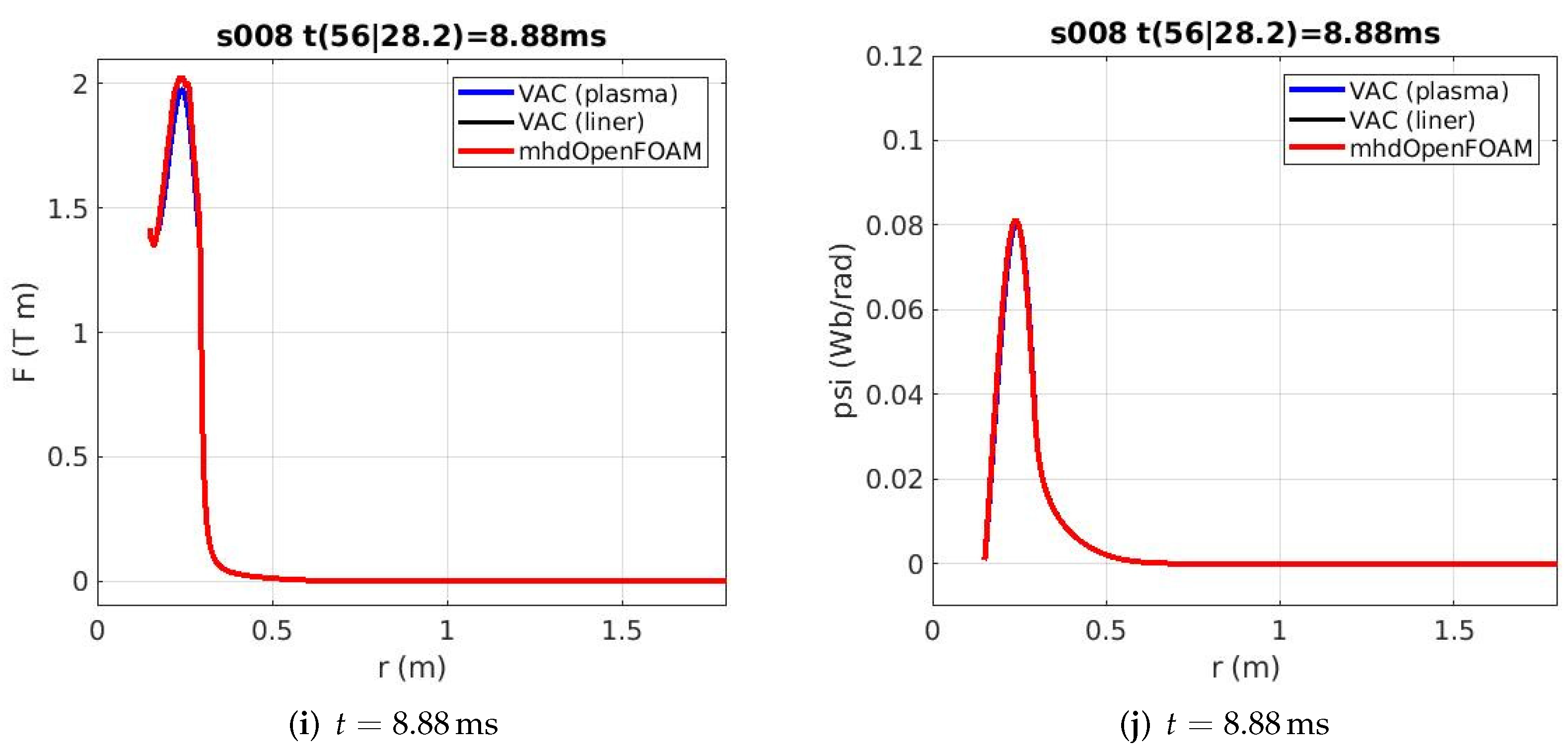
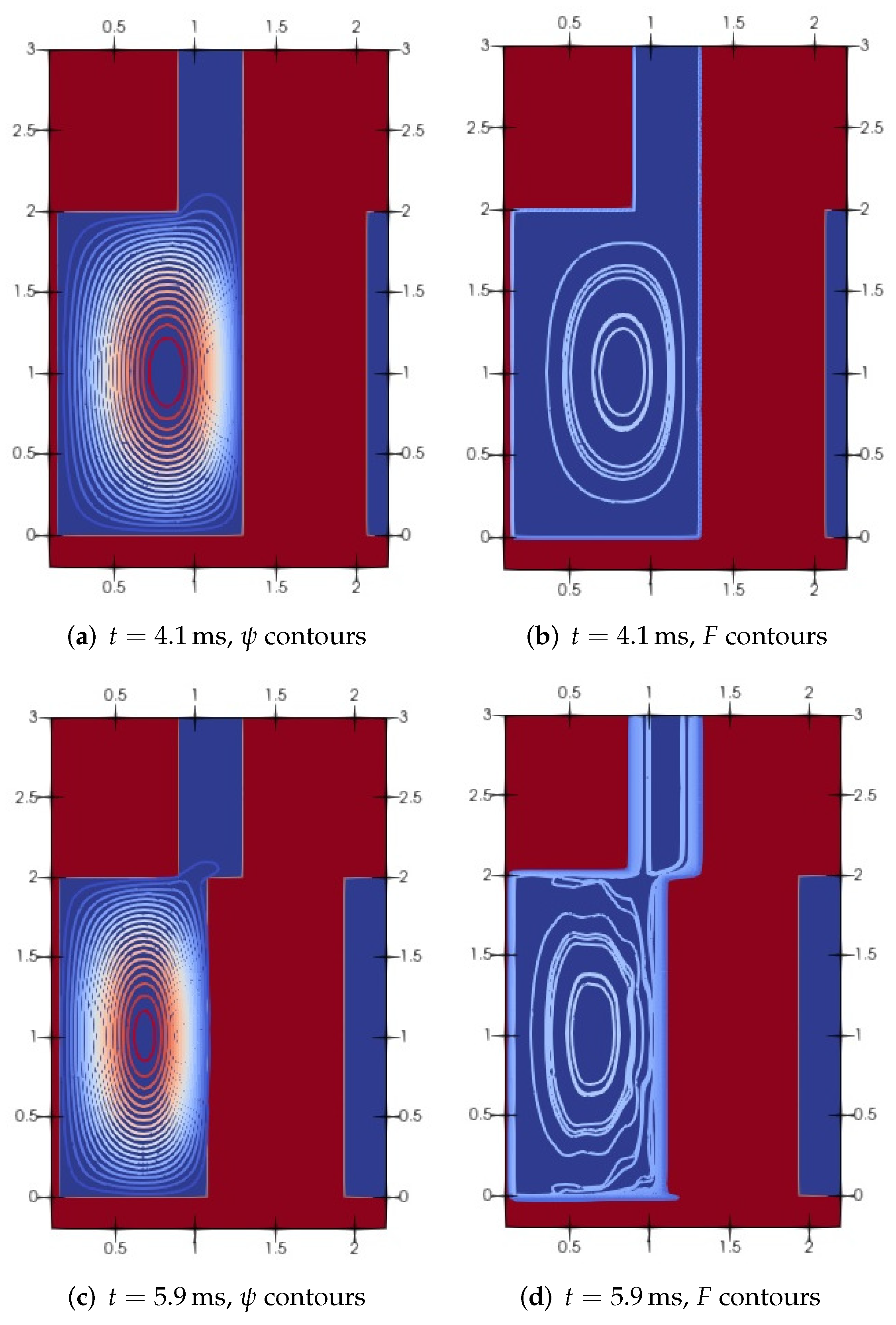
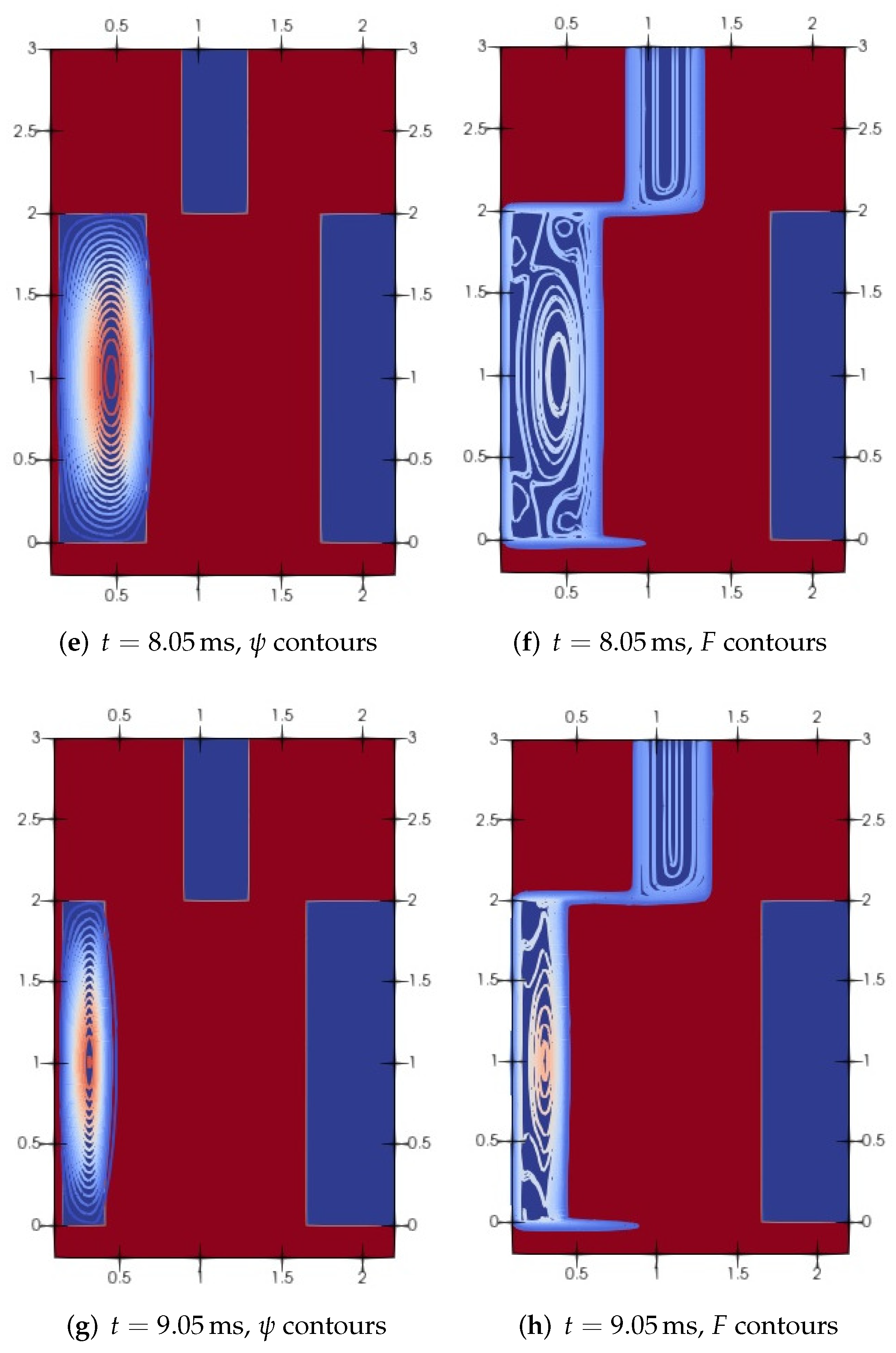
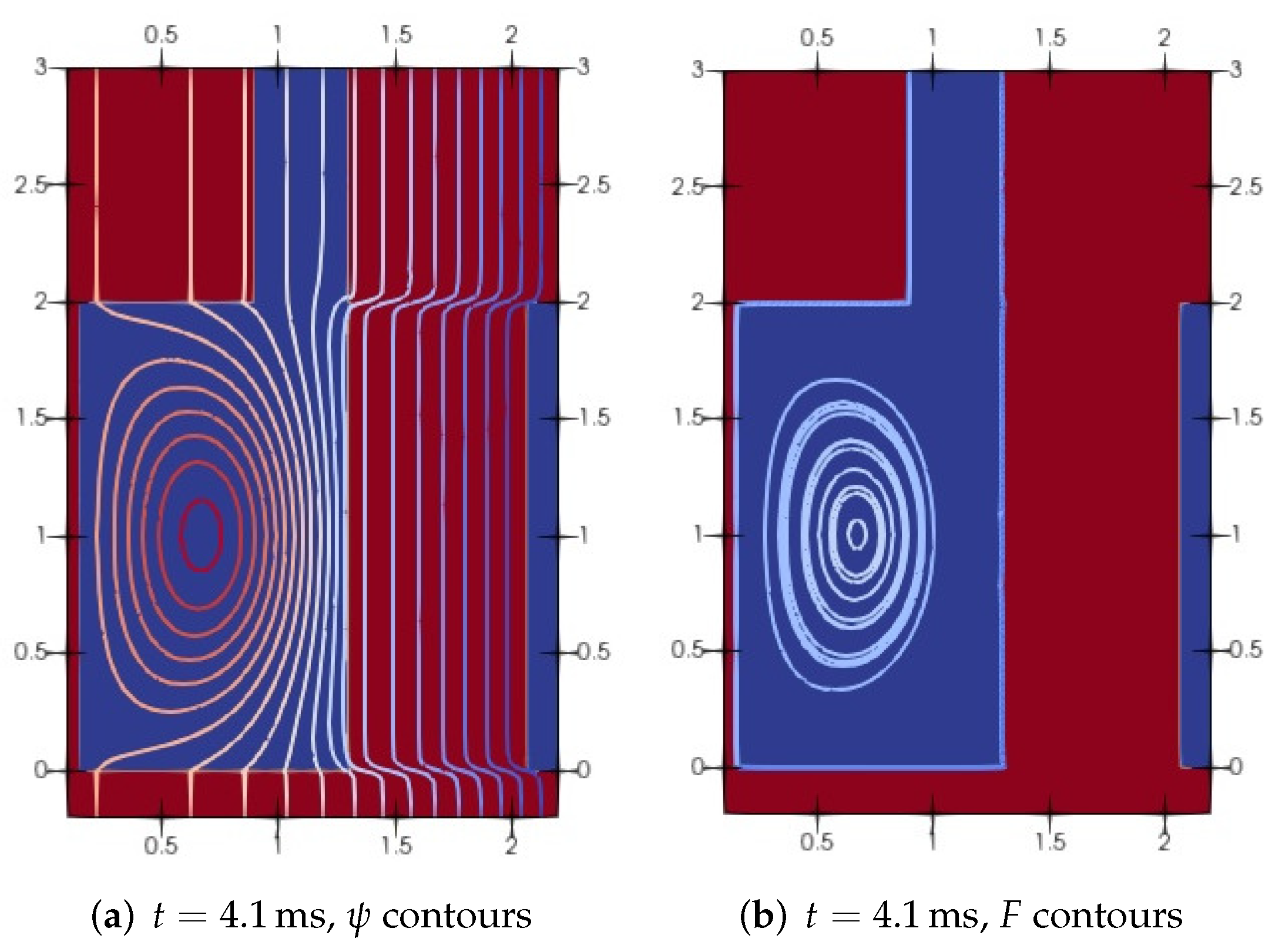
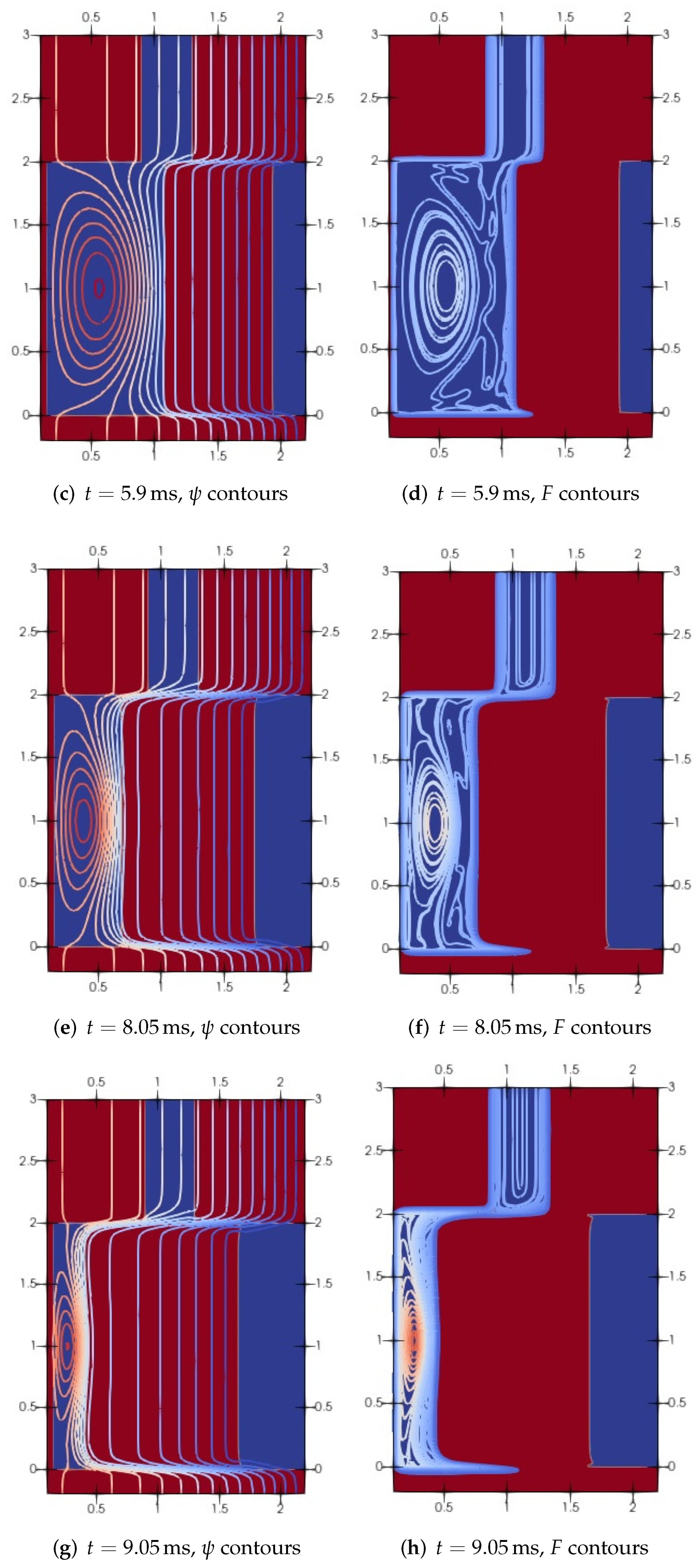
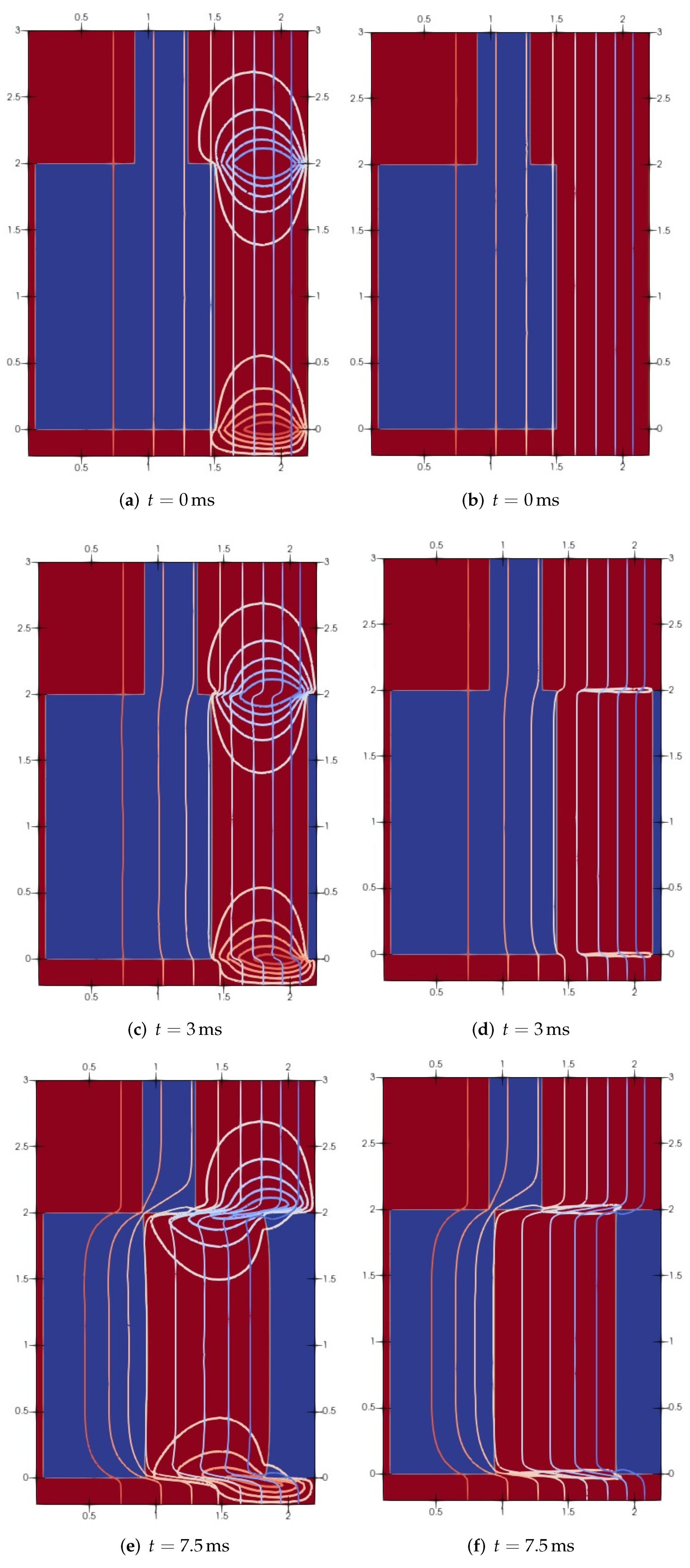
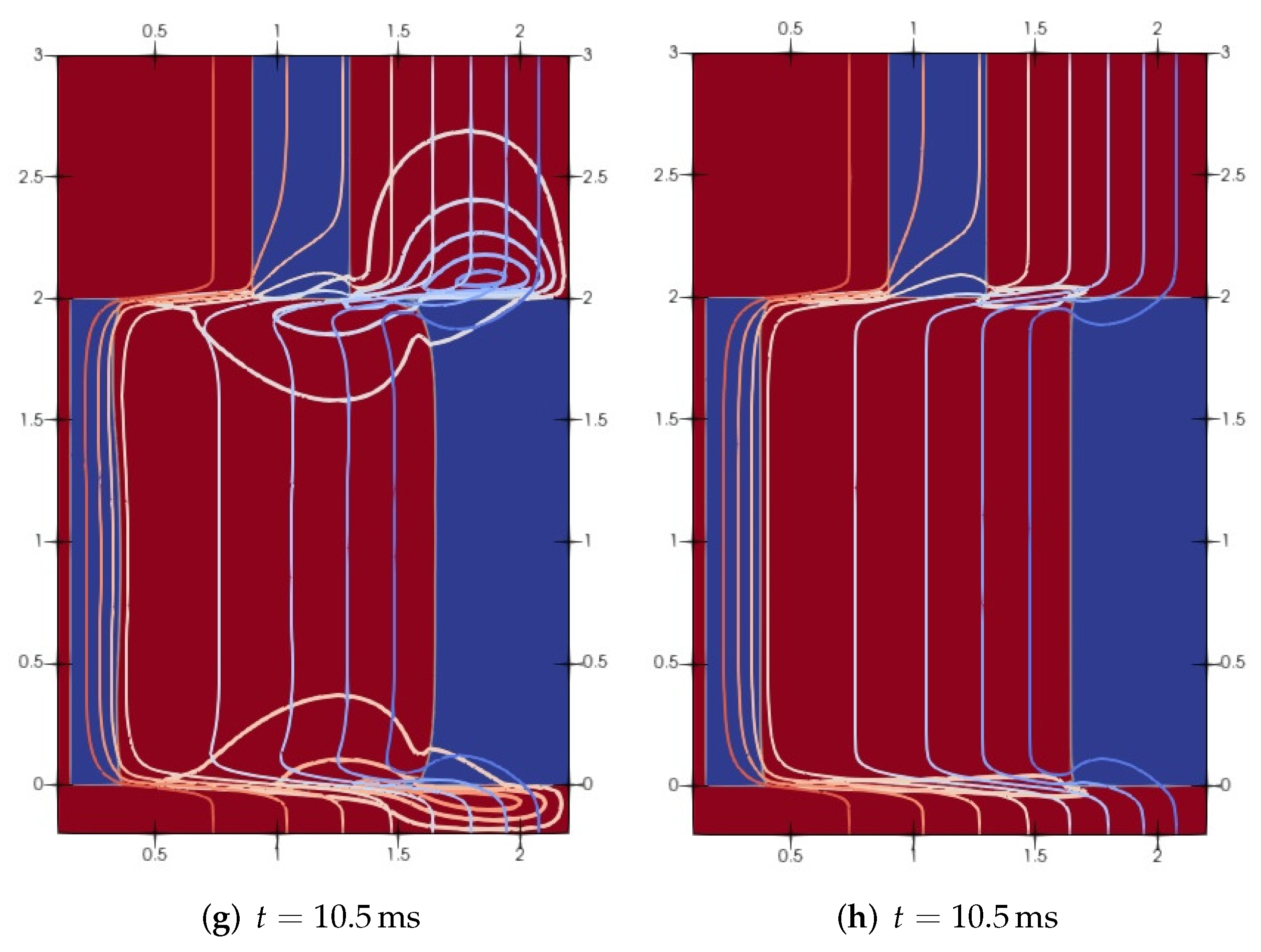
Comparison between “mhdCompressibleInterFoam” solver and “layered VAC” for the evolution of the magnetic field during compression is presented in
Figure 12. Radial profiles of toroidal function
F and poloidal flux function
at the equator at several instances during compression are given in the left and right columns of the
Figure 12, respectively. First of all, one can see that there is good agreement between the results obtained with “mhdCompressibleInterFoam” solver and “layered VAC” for the evolution of the magnetic field in both gas and liquid liner regions, which is encouraging. It it also important to note that viscosity seems to have a little effect on the evolution of the magnetic field. This indicates that using a high viscosity value in “mhdCompressibleInterFoam” to damp the waves and high velocities that might occur in the vicinity of the central shaft, does not significantly influence magnetic field evolution but it does help to stabilize computation and avoid undesirable decrease in the time step.
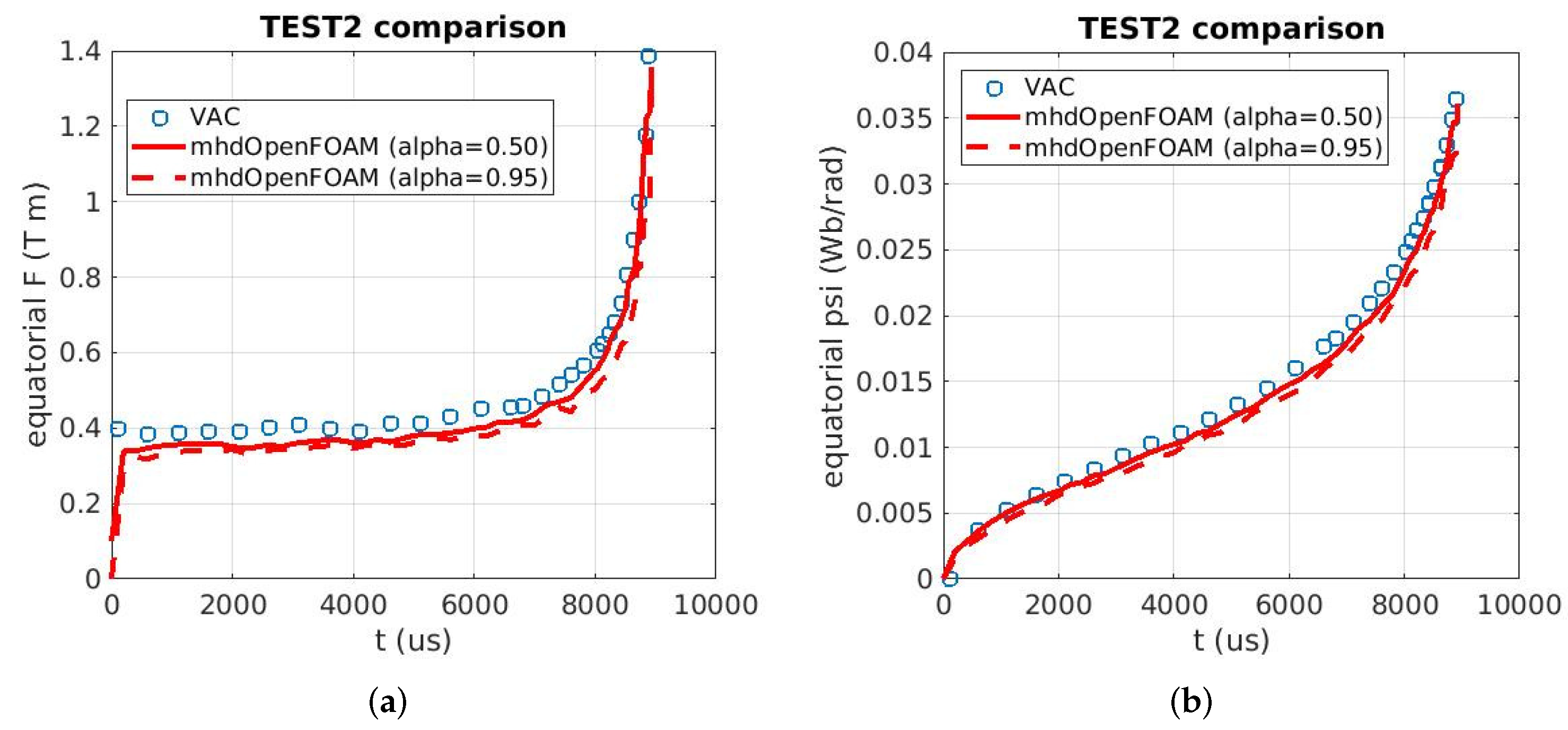
Comparison of the toroidal function
F and poloidal flux function
at the plasma-liquid metal interface at equator (
m) during compression is plotted in
Figure 13. Results are shown for two different values of volume of fraction
, given by solid (
) and broken (
) red lines. Corresponding data from “layered VAC” simulation is shown by hollow circular symbols. It can be seen that there is good agreement between the results obtained with both codes. Following the toroidal function
F value at the interface (
Figure 13a), the next can be observed: (i) it starts at
which corresponds to the initial shaft current of
; (ii) it gradually goes up for the majority of the compression and then rapidly increases towards the end. This behavior goes in line with compression trajectory that is characterized by rapid acceleration of the liner during the last millisecond of the compression. The poloidal flux function
value at the interface (
Figure 13b) can be interpreted as the amount of poloidal flux being diffused into the liner at a certain time during compression. Initially, there is no poloidal flux in the liquid liner (
). Then the poloidal flux starts to diffuse into the liner, and for the parameters and trajectory of the test case, about one third of the initial flux ends up in the liner at the time of maximum compression time (
at
compared to
of the initial target).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}