

Mechanisms of Plasma Actuators Controlling High-Aspect-Ratio Rectangular Jet Width for Automobile Air Conditioning Systems


Abstract
:1. Introduction
2. Experiment Setup
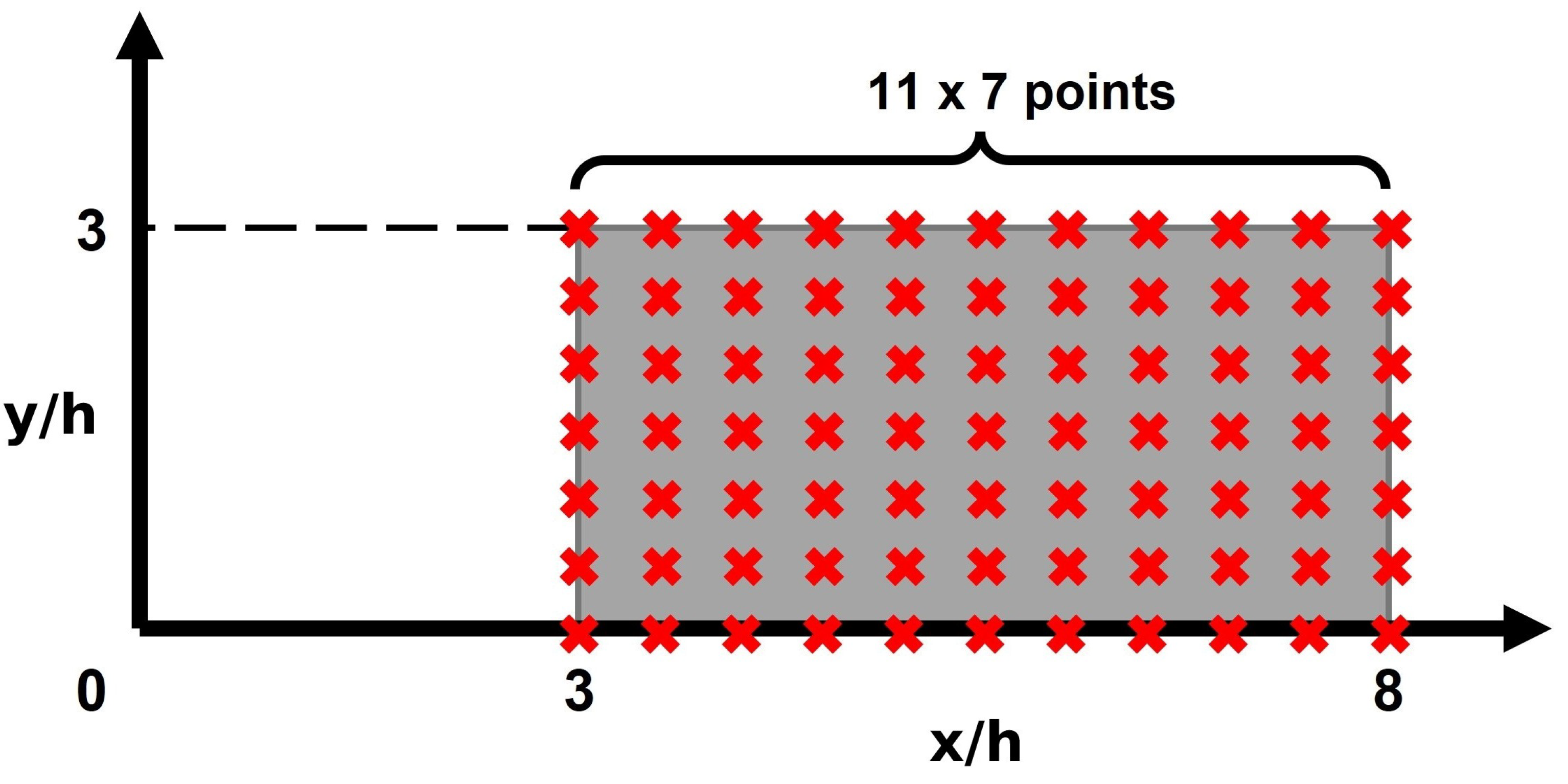
2.1. Flow Visualization and Measurement Setup
- The raw voltage data from hot-wire measurement were collected at a 50-kHz sampling rate within 3 s for each measurement point and converted to velocity. From here, the velocity trace of the flow was obtained for further processing.
- Velocity data were processed for spectral analysis to convert the signal from time-series to frequency domain using a fast Fourier transformation (FFT) to obtain the velocity fluctuations’ power spectral density (PSD). The PSD was analyzed to identify the frequency band corresponding to the length scales of interest.
- The integral length scale L (macro-scale) can be calculated by Equation (1) and the dissipation length scale l (micro-scale) can be calculated by Equation (2). Both use the method shown by Roach [25]:where:—the mean of the U-velocity;—the standard deviation of the U-velocity;—the energy corresponding to the frequency from the energy spectrum.
- Repeat for all the measuring points.
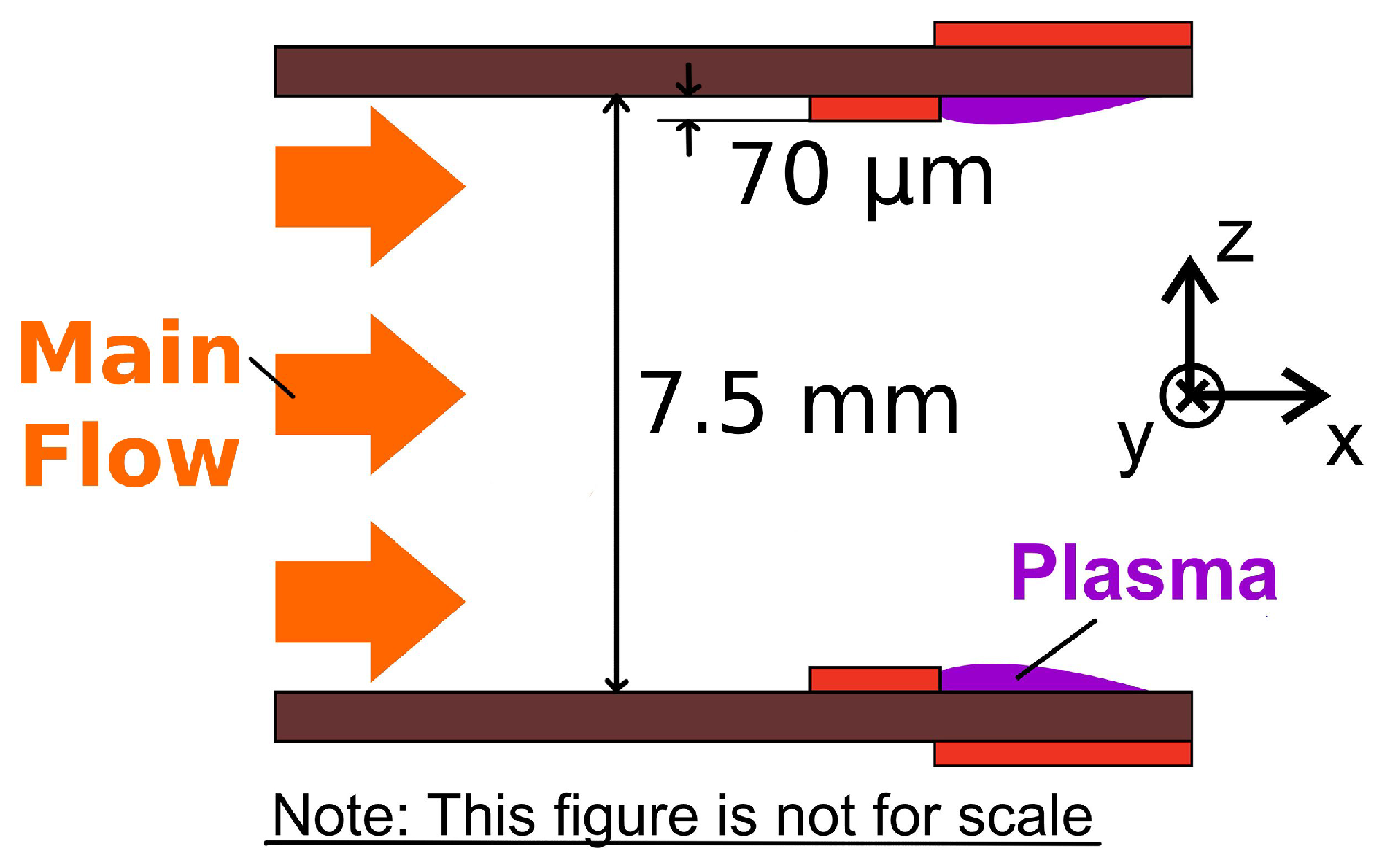
2.2. High-Aspect-Ratio Rectangular Jet with Plasma Actuator
- Cut copper adhesive tape to the designed width and length and paste it onto the edge of Part a (as shown in Figure 3); this becomes the copper-covered electrode. Then, cut the polyamide adhesive tape and attach it next to the copper-covered electrode to complete the first layer.
- Take two layers of polyamide tape and paste them on top of the first layer to create the dielectric layers. These become the second and third layers of the PA.
- Cut copper adhesive tape to the width and length of the exposed electrode and paste it on top of the third layer at the designed position.
- —temperature measured at a point in space;
- —ambient temperature inside the temperature-controlled chamber;
- —temperature at the outlet of the nozzle, where = (0, 0, 0).
3. Results and Discussion
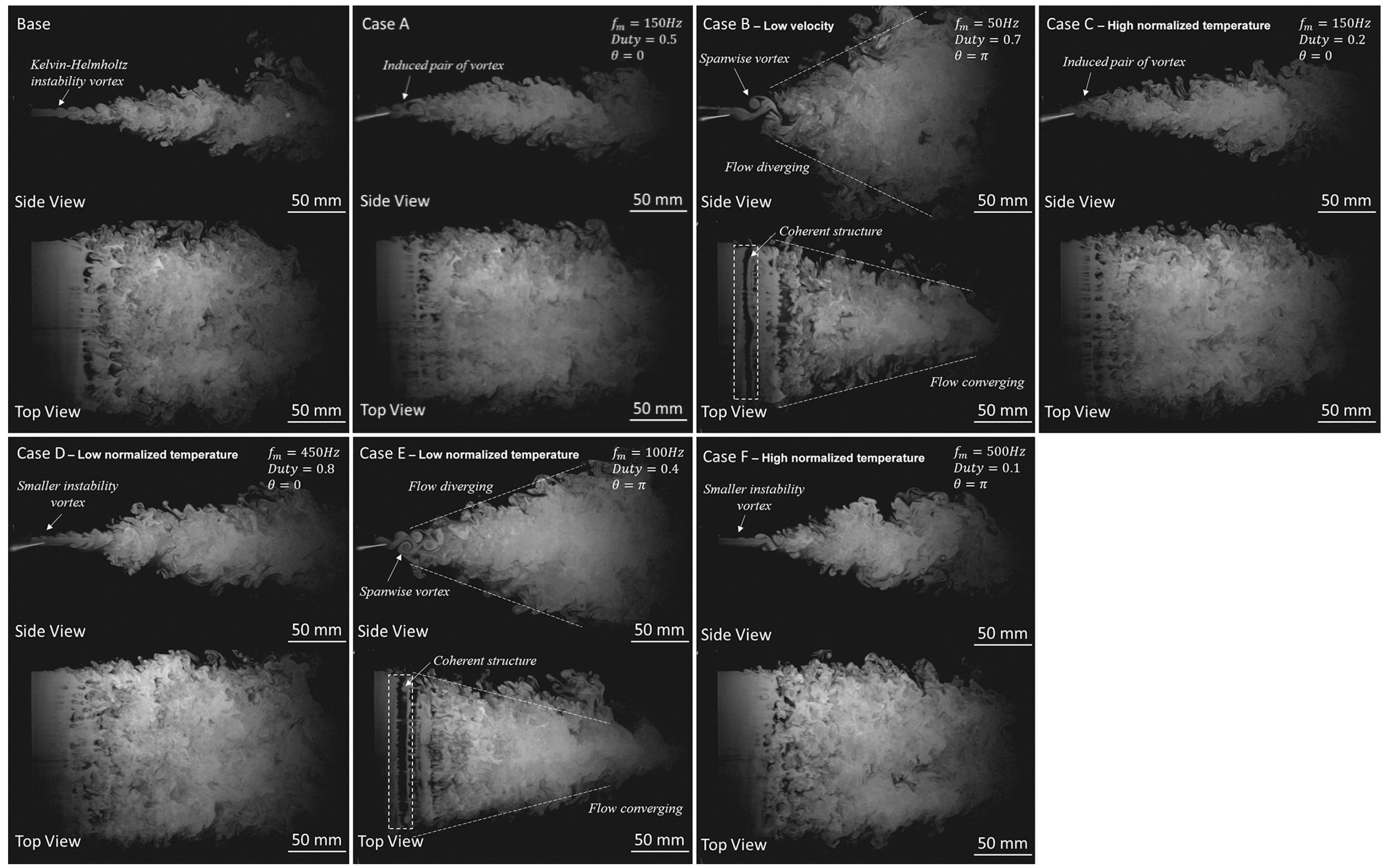
3.1. Flow Features and Turbulent Structure of High-Aspect-Ratio Rectangular Jet Controlled by PAs
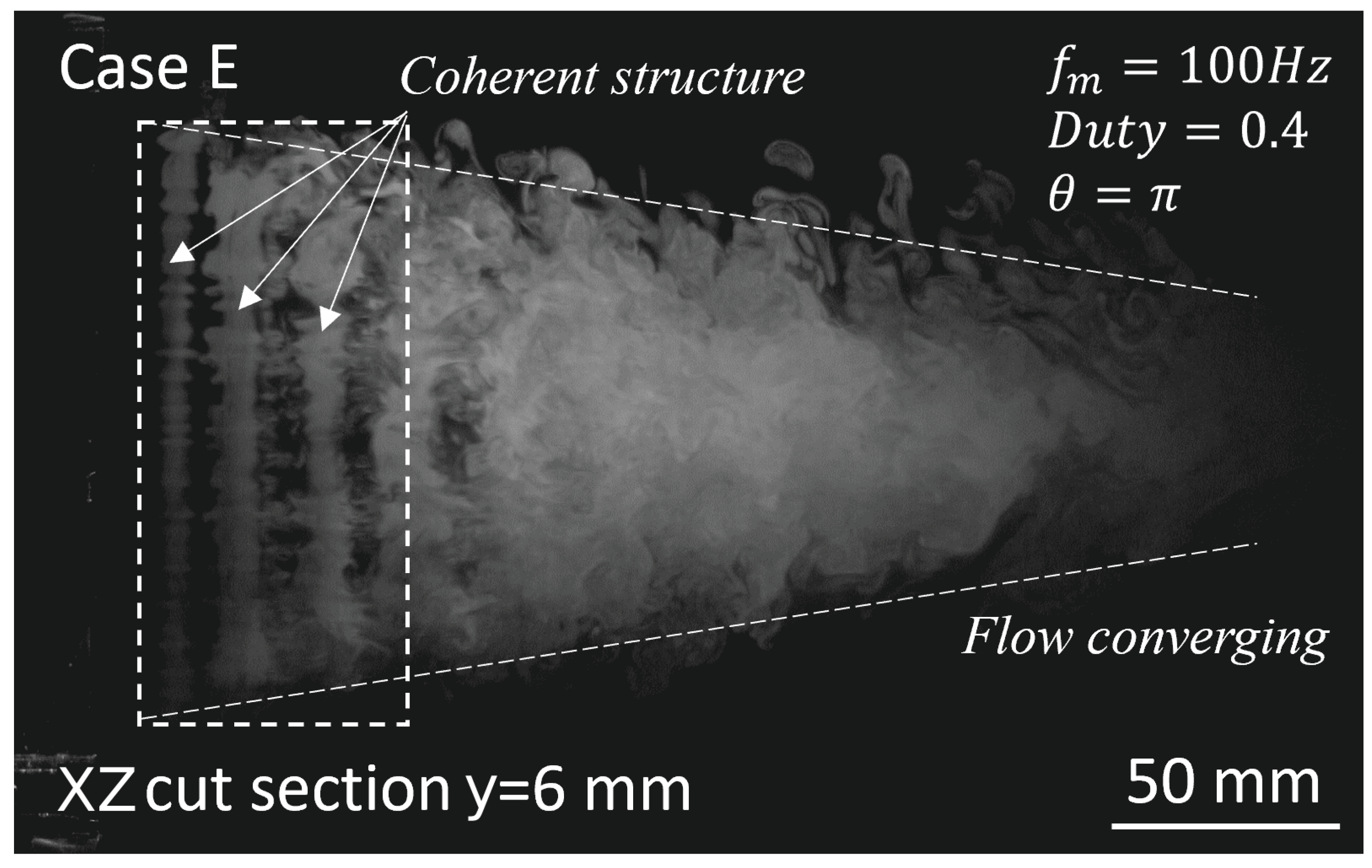
3.2. Mechanism of Rectangular Jet Divergence and Convergence by PAs
- —relative vorticity caused by wind or flow control;
- f—planetary vorticity caused by rotation of the earth (for this application, the effect is neglected, as );
- —component of coordinate system;
- —velocity component according to the coordinate system;
- —mean density of the fluid.
- l—length of the coherent structure.
3.3. Energy Spectra Analysis of Rectangular Jet with PA
- —Strouhal number;
- —vortex shedding frequency, also known as the dominant frequency during analysis of the energy density spectrum;
- —PA modular frequency applied to the rectangular jet flow;
- h—characteristic length, i.e., the rectangular nozzle height;
- —velocity of the initial flow.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| A/C | Air Conditioning |
| AFC | Active Flow Control |
| PA | Plasma Actuator |
| DBD | Dielectric Barrier Discharge |
| HAR | High-Aspect-Ratio |
References
- Castiglioni, G.; Russo, R.N.; Mardall, J.; Mancini, N. Thermal System with High Aspect Ratio Vent. U.S. Patent 10,464,397, 5 November 2019. [Google Scholar]
- Rajaratnam, N. Turbulent Jets; Elsevier: Amsterdam, The Netherlands, 1976; Chapter 13; p. 267. [Google Scholar]
- Shakouchi, T. Jet Flow Engineering-Fundamentals and Application; Morikita-Shuppan Co.: Tokyo, Japan, 2004. (In Japanese) [Google Scholar]
- Yang, X.; Long, X.; Yao, X. Numerical investigation on the mixing process in a steam ejector with different nozzle structures. Int. J. Therm. Sci. 2012, 56, 95–106. [Google Scholar] [CrossRef]
- Deo, R.C.; Mi, J.; Nathan, G.J. The influence of nozzle-exit geometric profile on statistical properties of a turbulent plane jet. Exp. Therm. Fluid Sci. 2007, 32, 545–559. [Google Scholar] [CrossRef]
- Batchelor, G. Fluid Mechanics. J. Fluid Mech. 1989, 205, 593–594. [Google Scholar] [CrossRef]
- Luo, M.; Wang, Z.; Zhang, H.; Arens, E.; Filingeri, D.; Jin, L.; Ghahramani, A.; Chen, W.; He, Y.; Si, B. High-density thermal sensitivity maps of the human body. Build. Environ. 2020, 167, 106435. [Google Scholar] [CrossRef]
- Corke, T.C.; Enloe, C.L.; Wilkinson, S.P. Dielectric barrier discharge plasma actuators for flow control. Annu. Rev. Fluid Mech. 2010, 42, 505–529. [Google Scholar] [CrossRef]
- Kriegseis, J.; Simon, B.; Grundmann, S. Towards in-flight applications? A review on dielectric barrier discharge-based boundary-layer control. Appl. Mech. Rev. 2016, 68, 020802. [Google Scholar] [CrossRef]
- Moreau, E. Airflow control by non-thermal plasma actuators. J. Phys. Appl. Phys. 2007, 40, 605. [Google Scholar] [CrossRef]
- Benard, N.; Moreau, E. Electrical and mechanical characteristics of surface AC dielectric barrier discharge plasma actuators applied to airflow control. Exp. Fluids 2014, 55, 1846. [Google Scholar] [CrossRef] [Green Version]
- Kotsonis, M. Diagnostics for characterisation of plasma actuators. Meas. Sci. Technol. 2015, 26, 092001. [Google Scholar] [CrossRef]
- Pham, A.V.; Inaba, K.; Saito, M.; Sakai, M. Effect of Plasma Actuator on Velocity and Temperature Profiles of High Aspect Ratio Rectangular Jet. Fluids 2022, 7, 281. [Google Scholar] [CrossRef]
- Jakob, H.; Kim, M.K. Feasibility Study on the Use of Non-Thermal Plasma for a Cold Radio Blackout Experiment. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2150. [Google Scholar] [CrossRef]
- Jukes, T.N.; Choi, K.S.; Johnson, G.A.; Scott, S.J. Characterization of surface plasma-induced wall flows through velocity and temperature measurements. AIAA J. 2006, 44, 764–771. [Google Scholar] [CrossRef]
- Benard, N.; Bonnet, J.P.; Touchard, G.; Moreau, E. Flow Control by Dielectric Barrier Discharge Actuators: Jet Mixing Enhancement. AIAA J. 2008, 46, 2293–2305. [Google Scholar] [CrossRef]
- Corke, T.; Matlis, E. Phased plasma arrays for unsteady flow control. In Proceedings of the Fluids 2000 Conference and Exhibit, Graz, Austria, 24–29 September 2000; p. 2323. [Google Scholar] [CrossRef]
- Parekh, D.; Kibens, V.; Glezer, A.; Wiltse, J.; Smith, D. Innovative jet flow control-mixing enhancement experiments. In Proceedings of the 34th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 15–18 January 1996; p. 308. [Google Scholar] [CrossRef]
- Strykowski, P.; Wilcoxon, R. Mixing enhancement due to global oscillations in jets with annular counterflow. AIAA J. 1993, 31, 564–570. [Google Scholar] [CrossRef]
- Ginevsky, A.; Vlasov, Y.V.; Vlasov, E.V.; Karavosov, R. Acoustic Control of Turbulent Jets; Springer Science & Business Media: Berlin, Germany, 2004; p. 4. [Google Scholar]
- Suzuki, H.; Kasagi, N.; Suzuki, Y. Active control of an axisymmetric jet with distributed electromagnetic flap actuators. Exp. Fluids 2004, 36, 498–509. [Google Scholar] [CrossRef]
- Kozato, Y.; Kikuchi, S.; Imao, S.; Kato, Y.; Okayama, K. Flow control of a rectangular jet by DBD plasma actuators. Int. J. Heat Fluid Flow 2016, 62, 33–43. [Google Scholar] [CrossRef]
- Thielicke, W.; Sonntag, R. Particle Image Velocimetry for MATLAB: Accuracy and enhanced algorithms in PIVlab. J. Open Res. Softw. 2021, 9. [Google Scholar] [CrossRef]
- El-Gabry, L.A.; Thurman, D.R.; Poinsatte, P.E. Procedure for Determining Turbulence Length Scales Using Hotwire Anemometry; Technical Report; National Aeronautics and Space Administration: Hampton, VA, USA, 2014. [Google Scholar]
- Roach, P. The generation of nearly isotropic turbulence by means of grids. Int. J. Heat Fluid Flow 1987, 8, 82–92. [Google Scholar] [CrossRef]
- Tesař, V. Axisymmetric nozzles with chamfered contraction. Sens. Actuators A Phys. 2017, 263, 147–158. [Google Scholar] [CrossRef]
- Fukagata, K.; Yamada, S.; Ishikawa, H. Plasma actuators: Fundamentals and research trends. J. Jpn. Soc. Fluid Mech. 2010, 29, 243–250. [Google Scholar]
- List, E. Turbulent jets and plumes. Annu. Rev. Fluid Mech. 1982, 14, 189–212. [Google Scholar] [CrossRef]
- Von Helmholtz, H. Über Discontinuirliche Flüssigkeits-Bewegungen; Akademie der Wissenschaften zu Berlin: Berlin, Germany, 1868. [Google Scholar]
- Thompson, W.S. Hydrokinetic solutions and observations. Phil. Mag. 1871, 1, 374. [Google Scholar] [CrossRef]
- Caulfield, C.; Peltier, W. The anatomy of the mixing transition in homogeneous and stratified free shear layers. J. Fluid Mech. 2000, 413, 1–47. [Google Scholar] [CrossRef]
- Wu, J.Z.; Ma, H.Y.; Zhou, M.D. Vorticity and Vortex Dynamics; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Kolmogorov, A.N. The local structure of turbulence in incompressible viscous fluid for very large Reynolds numbers. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1991, 434, 9–13. [Google Scholar] [CrossRef]
- Pope, S.B.; Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000; p. 242. [Google Scholar]
- Wiltse, J.M.; Glezer, A. Direct excitation of small-scale motions in free shear flows. Phys. Fluids 1998, 10, 2026–2036. [Google Scholar] [CrossRef]
- Chen, J.E.; Theurich, T.; Krack, M.; Sapsis, T.; Bergman, L.A.; Vakakis, A.F. Intense cross-scale energy cascades resembling “mechanical turbulence” in harmonically driven strongly nonlinear hierarchical chains of oscillators. Acta Mech. 2022, 233, 1289–1305. [Google Scholar] [CrossRef]
- Hinze, J. Isotropic turbulence. In Turbulence, 2nd ed.; McGraw-Hill: New York, NY, USA, 1975; p. 790. [Google Scholar]
- Tennekes, H.; Lumley, J.L. A First Course in Turbulence; MIT Press: Cambridge, MA, USA, 1972; p. 300. [Google Scholar]
- Palkin, E.; Hadžiabdić, M.; Mullyadzhanov, R.; Hanjalić, K. Control of flow around a cylinder by rotary oscillations at a high subcritical Reynolds number. J. Fluid Mech. 2018, 855, 236–266. [Google Scholar] [CrossRef]
- Mao, X.; Wang, B. Spanwise localized control for drag reduction in flow passing a cylinder. J. Fluid Mech. 2021, 915, A112. [Google Scholar] [CrossRef]
- Melander, M.V.; Hussain, F. Coupling between a coherent structure and fine-scale turbulence. Phys. Rev. 1993, 48, 2669. [Google Scholar] [CrossRef]
- Holton, J.R.; Hakim, G.J. An Introduction to Dynamic Meteorology, 5th ed.; Academic Press: Boston, MA, USA, 2013; p. 100. [Google Scholar] [CrossRef]
- Rossby, C.G. Dynamics of Steady Ocean Currents in the Light of Experimental Fluid Mechanics; Massachusetts Institute of Technology and Woods Hole Oceanographic Institution: Cambridge, MA, USA, 1936. [Google Scholar]
- Rossby, C.G. Planetary flow pattern in the atmosphere. Quart. J. Roy. Meteor. Soc. 1940, 66, 68–87. [Google Scholar]
- Sakamoto, H.; Haniu, H. A Study on Vortex Shedding From Spheres in a Uniform Flow. J. Fluids Eng. 1990, 112, 386–392. [Google Scholar] [CrossRef]
- Katopodes, N.D. Free-Surface Flow: Environmental Fluid Mechanics; Butterworth-Heinemann: Oxford, UK, 2018; p. 384. [Google Scholar]
- Gungor, A.; Khalid, M.S.U.; Hemmati, A. Classification of vortex patterns of oscillating foils in side-by-side configurations. J. Fluid Mech. 2022, 951, A37. [Google Scholar] [CrossRef]
- Marzouk, S.; Hnaien, N. Experimental study of an acoustically excited plane jet at low Reynolds numbers. J. Appl. Fluid Mech. 2019, 12, 527–537. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unit |
|---|---|---|---|
| B | Nozzle width | 150 | mm |
| h | Nozzle height | 7.5 | mm |
| Rectangular jet initial velocity | 4.5 | m/s | |
| Peak-to-peak voltage of PA controlling signal | 6 | kV | |
| Base frequency of PA controlling signal | 15 | kHz |
| No. | Case Name | Description | (Hz) | D | 1 | 2 | |
|---|---|---|---|---|---|---|---|
| 1 | Base | Base case | - | - | - | - | - |
| 2 | Case A | High Velocity | 150 | 0.5 | 0 | 15.47% | - |
| 3 | Case B | Low Velocity | 50 | 0.7 | −44.98% | - | |
| 4 | Case C | High Normalized Temp. | 150 | 0.2 | 0 | - | 13.68% |
| 5 | Case D | Low Normalized Temp. | 450 | 0.8 | 0 | - | −14.91% |
| 6 | Case E | Low Normalized Temp. | 100 | 0.4 | - | −17.38% | |
| 7 | Case F | High Normalized Temp. | 500 | 0.1 | - | 10.44% |
| (Hz) | D | (Hz) | |||
|---|---|---|---|---|---|
| Case A | 150 | 0.5 | 0 | 300.67 | 0.501 |
| Case B | 50 | 0.7 | 100.67 | 0.168 | |
| Case C | 150 | 0.2 | 0 | 300 | 0.500 |
| Case D | 450 | 0.8 | 0 | 154.67 | 0.258 |
| Case E | 100 | 0.4 | 200.67 | 0.334 | |
| Case F | 500 | 0.1 | 373.33 | 0.622 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, A.V.; Inaba, K. Mechanisms of Plasma Actuators Controlling High-Aspect-Ratio Rectangular Jet Width for Automobile Air Conditioning Systems. Fluids 2023, 8, 186. https://doi.org/10.3390/fluids8070186
Pham AV, Inaba K. Mechanisms of Plasma Actuators Controlling High-Aspect-Ratio Rectangular Jet Width for Automobile Air Conditioning Systems. Fluids. 2023; 8(7):186. https://doi.org/10.3390/fluids8070186
Chicago/Turabian StylePham, Anh Viet, and Kazuaki Inaba. 2023. "Mechanisms of Plasma Actuators Controlling High-Aspect-Ratio Rectangular Jet Width for Automobile Air Conditioning Systems" Fluids 8, no. 7: 186. https://doi.org/10.3390/fluids8070186
APA StylePham, A. V., & Inaba, K. (2023). Mechanisms of Plasma Actuators Controlling High-Aspect-Ratio Rectangular Jet Width for Automobile Air Conditioning Systems. Fluids, 8(7), 186. https://doi.org/10.3390/fluids8070186