4.2. Comparisons between Extended Sanders–Koiter Shell Theory and Simplified Thin Shell Models
In the numerical simulations performed to compare simplified and extended shell models, the aspect ratio L/R2 assumes values from 10 (relatively short DWCNT) to 50 (long DWCNT) and 100 (very long DWCNT), while the thickness ratio R2/h assumes values from 25 (relatively thick DWCNT) to 50 (thin DWCNT) and 250 (very thin DWCNT).
It must be observed that, since the thickness ratio
R2/
h considered in the numerical simulations is within the range of validity 20 ≤
R/
h ≤ 500 of Kirchhoff–Love’s assumptions, then the DWCNT can be modelled by means of two concentric thin elastic circular cylindrical shells, and the Sanders–Koiter thin shell theory can be correctly applied, see ref. [
7] for more details.
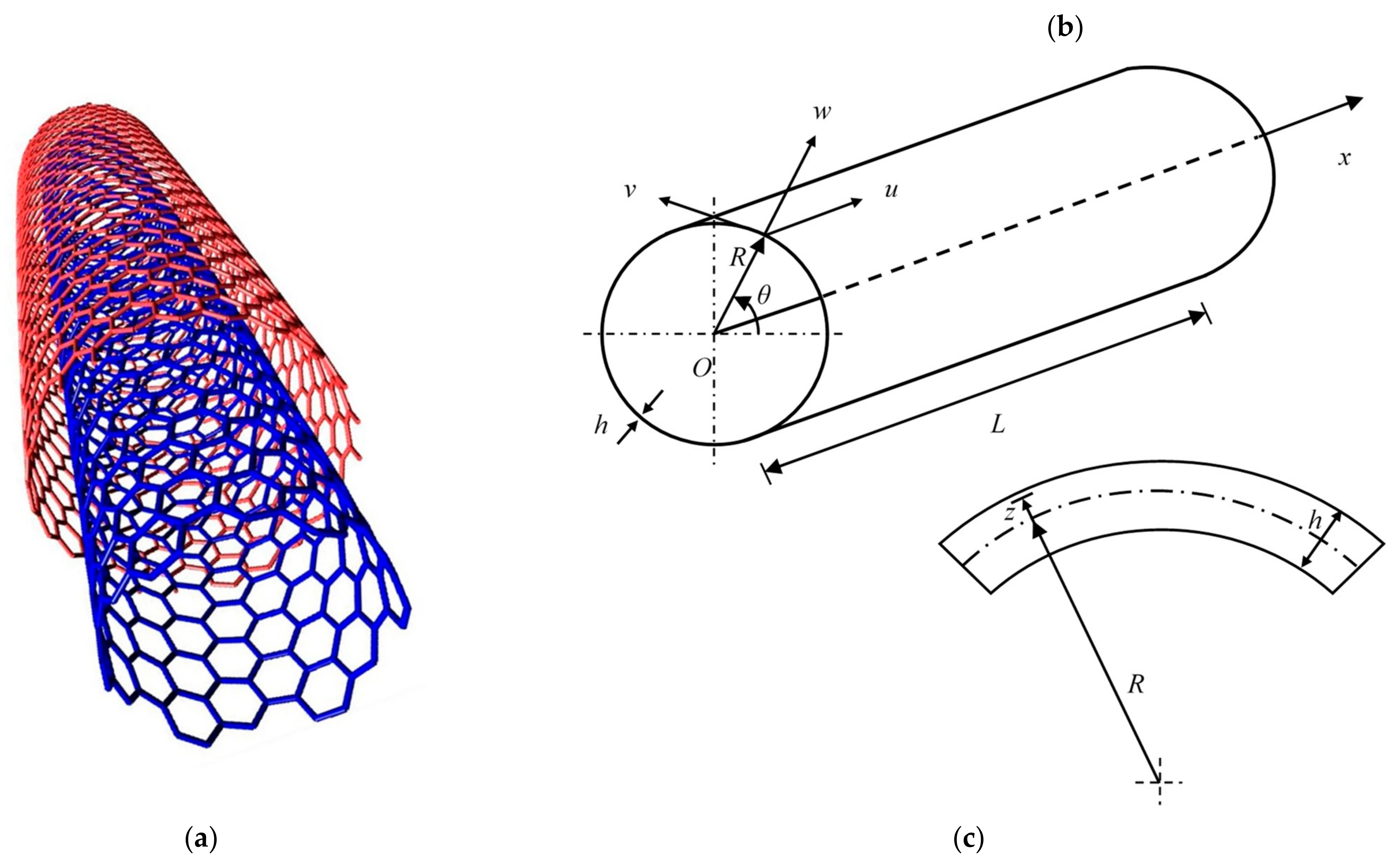
As previously stated, in the present paper, the actual discrete DWCNTs are modelled by means of couples of concentric equivalent continuous thin cylindrical shells with van der Waals interactions.
In the case of cylindrical shells, the modal shapes associated with each natural frequency can be classified as primarily radial (flexural), longitudinal (axial) or circumferential (torsional). It was demonstrated that the lowest natural frequency is usually associated with the modal shape where the transverse (i.e., radial) displacement
w is prevalent, while the other two natural frequencies are usually higher by one order of magnitude and they are associated with modal shapes where the displacements in the tangent plane (i.e., longitudinal
u and circumferential
v) dominate, see Refs. [
4,
7,
8] for more details.
Moreover, since a DWCNT is constituted by two concentric cylindrical shells (i.e., SWCNTs), then each modal shape of the DWCNT is present twice, once referred to the inner cylindrical shell (with prevalent radius
R1) and once referred to the outer cylindrical shell (with prevalent radius
R2). As reported in literature [
61], between the two corresponding natural frequencies, the one associated with the modal shape referred to the inner cylindrical shell (inner radius
R1) is usually lower.
Therefore, in the following numerical simulations, only the natural frequencies corresponding to modal shapes with prevalent radial displacement w and prevalent inner radius R1 will be analysed, which, according to the previous observations, represent the fundamental (i.e., lowest) frequencies of DWCNTs.
In this paper, the extended Sanders–Koiter shell theory, which retains three middle surface strains and three middle surface changes in curvature and torsion in the expression of the elastic strain energy (12), is taken as reference model. Three different simplified elastic shell models are compared with the extended Sanders–Koiter shell theory to investigate their applicability and limitations for vibration modelling of DWCNTs in case of axisymmetric (n = 0), beam-like (n = 1) and shell-like (n ≥ 2) modes.
The first simplified elastic shell model studied is a reduced version of the Sanders–Koiter shell theory developed on the basis of the assumptions of the membrane shell theory (6) and (7), retaining only the three middle surface strains and neglecting the three middle surface changes in curvature and torsion .
The second simplified elastic shell model analysed is a reduced version of the Sanders–Koiter shell theory developed on the basis of the assumptions of the moment shell theory (8) and (9), retaining only the three middle surface changes in curvature and torsion and neglecting the three middle surface strains .
It must be stressed that, for shell-like modes, as reported in literature [
3], the membrane shell theory is accurate for relatively short and thin shells, when the effect of the middle surface changes in curvature and torsion
is negligible (very small bending/torsional deformations); conversely, the moment shell theory is accurate for relatively long and thick shells, when the effect of the middle surface strains
is negligible (very small stretching deformations).
Therefore, for shell-like modes, a third simplified elastic shell model is introduced, which is a new approximate model, developed on the basis of a combination of the hypotheses of the membrane and semi-moment theories of thin shells, retaining the middle surface terms and neglecting the middle surface changes in curvature and torsion .
4.2.1. Axisymmetric Vibration Modes
In this section, natural frequencies of simply supported DWCNTs, in case of axisymmetric vibration modes (n = 0), are obtained. Different numbers of longitudinal half-waves m are considered. Aspect ratios L/R2 = (10,50,100) and thickness ratios R2/h = (25,50,250) are investigated. Different elastic shell theories are compared.
In
Table 3,
Table 4 and
Table 5, comparisons between extended Sanders–Koiter and simplified membrane shell theories are reported. A negligible percentage difference (≈0%) is obtained for every number of longitudinal half-waves
m and every value of aspect
L/
R2 and thickness
R2/
h ratios.
In
Table 6,
Table 7 and
Table 8, comparisons between extended Sanders–Koiter and simplified moment shell theories are reported. A very large percentage difference (≈100%) is obtained for every number of longitudinal half-waves
m and every value of aspect
L/
R2 and thickness
R2/
h ratios.
Therefore, in case of axisymmetric vibration modes, membrane shell theory, which neglects the middle surface changes in curvature and torsion and retains the middle surface strains , gives an excellent agreement, with respect to the extended Sanders–Koiter shell theory, and can be adopted to properly compute the natural frequencies of DWCNTs.
These results, obtained for DWCNTs, confirm the applicability of membrane and limitations of moment thin shell theories for the axisymmetric vibration modelling of simply supported thin circular cylindrical shells [
4]. In fact, in this case, membrane (stretching) energy is prevalent, while bending (flexural) energy is negligible, in the expression of the elastic strain energy of the cylindrical shell.
Moreover, since, from the computations, it was found that, for axisymmetric vibration modes, the middle surface tangential shear strain is equal to zero , then this last component can be neglected. Therefore, a further simplified model, based on the hypotheses of the semi-membrane shell theory and retaining the middle surface strains (two terms instead of six) in the expression of the elastic strain energy (12), can be used. This model again provides an excellent agreement, but with a much lower computational effort, than the extended Sanders–Koiter shell theory. These last comparisons are omitted for the sake of brevity.
In particular, from the performed simulations it was found that, for sufficiently long and thin DWCNTs (L/R2 ≥ 50, R2/h ≥ 50), the contribution of the circumferential normal strain is strongly prevalent with respect to the one of the longitudinal normal strain ().
4.2.2. Beam-Like Vibration Modes
In this section, natural frequencies of simply supported DWCNTs in the case of beam-like modes (n = 1) are obtained. Different numbers of longitudinal half-waves m are considered. Aspect ratios L/R2 = (10,50,100) and thickness ratios R2/h = (25,50,250) are investigated. Different elastic shell theories are compared.
In
Table 9,
Table 10 and
Table 11, comparisons between extended Sanders–Koiter and simplified membrane shell theories are reported. Again, a negligible percentage difference (≈0%) is obtained for every number of longitudinal half-waves
m and every value of aspect
L/
R2 and thickness
R2/
h ratios.
In
Table 12,
Table 13 and
Table 14, comparisons between extended Sanders–Koiter and simplified moment shell theories are reported. Again, a very large percentage difference (≈100%) is found for every number of longitudinal half-waves
m and every value of aspect
L/
R2 and thickness
R2/
h ratios.
Therefore, also in case of beam-like vibration modes, membrane shell theory, which neglects the middle surface changes in curvature and torsion and retains the middle surface strains , gives an excellent agreement with respect to the extended Sanders–Koiter shell theory and can be adopted to properly compute the natural frequencies of DWCNTs.
These results, obtained for DWCNTs, confirm applicability of membrane and limitations of moment thin shell theories also for beam-like vibration modelling of simply supported thin circular cylindrical shells [
4]. In fact, also in this case, membrane energy is prevalent, while bending energy is negligible, in the expression of the elastic strain energy of the cylindrical shell.
From the computations it was obtained that, for beam-like vibration modes, all middle surface strains are not negligible. Therefore, a simplified elastic shell model, based on the hypotheses of the membrane shell theory and taking into account all the middle surface strains (three terms instead of six) in the expression of the elastic strain energy (12), can be adopted. This model provides an excellent agreement but with a lower computational effort than the extended Sanders–Koiter shell theory.
In particular, from the performed simulations, similarly to the axisymmetric modes, it was found that, for sufficiently long and thin DWCNTs (L/R2 ≥ 50, R2/h ≥ 50), the contribution of the circumferential normal strain is strongly prevalent with respect to the longitudinal normal and tangential shear strains ().
Therefore, from the results reported in the present and in the previous section, it can be derived that membrane shell theory, as a simplified elastic shell model, provides natural frequencies with excellent agreement with respect to the extended Sanders–Koiter shell theory with regard to axisymmetric and beam-like modes. The goal of the next section is to verify if the membrane shell theory can be rightly applied also to shell-like modes or of it is necessary to integrate/complete it with moment shell theory in order to obtain an acceptable agreement with the results of the extended Sanders–Koiter shell theory.
4.2.3. Shell-Like Vibration Modes
In this section, natural frequencies of simply supported DWCNTs in the case of shell-like vibration modes (n ≥ 2) are obtained. Different numbers of longitudinal half-waves m are considered. Aspect ratios L/R2 = (10,50,100) and thickness ratios R2/h = (25,50,250) are investigated. Different elastic shell theories are compared.
In
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
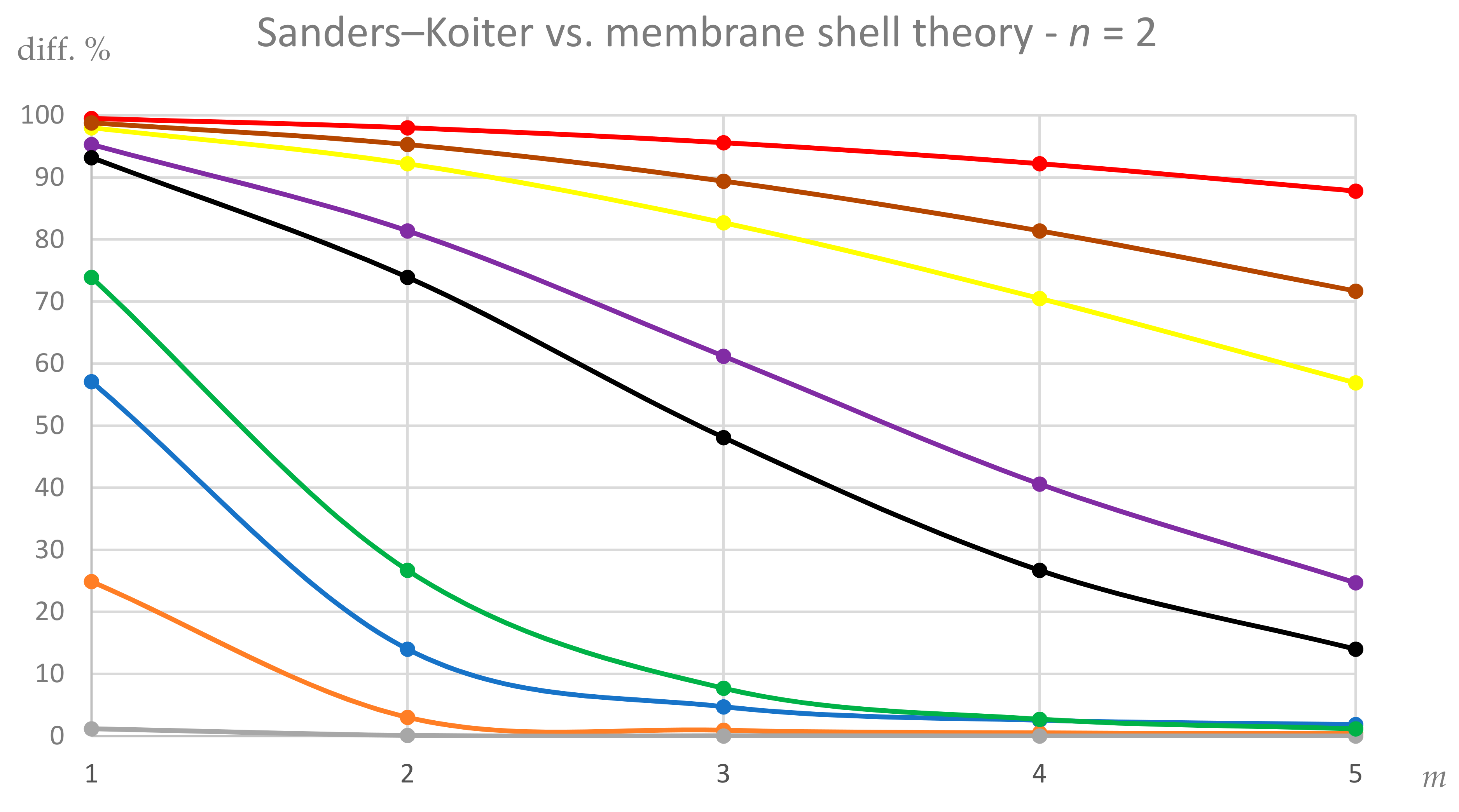
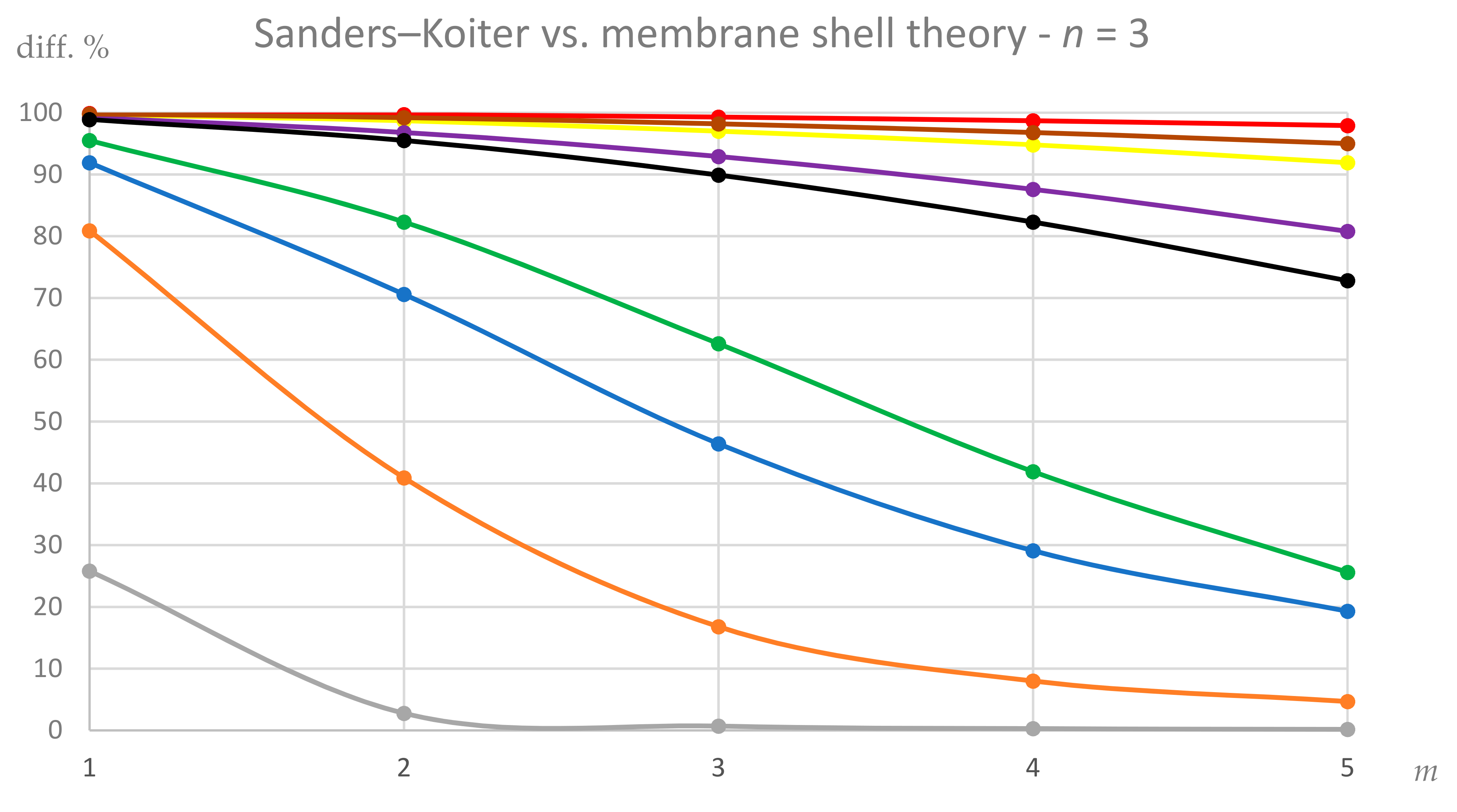
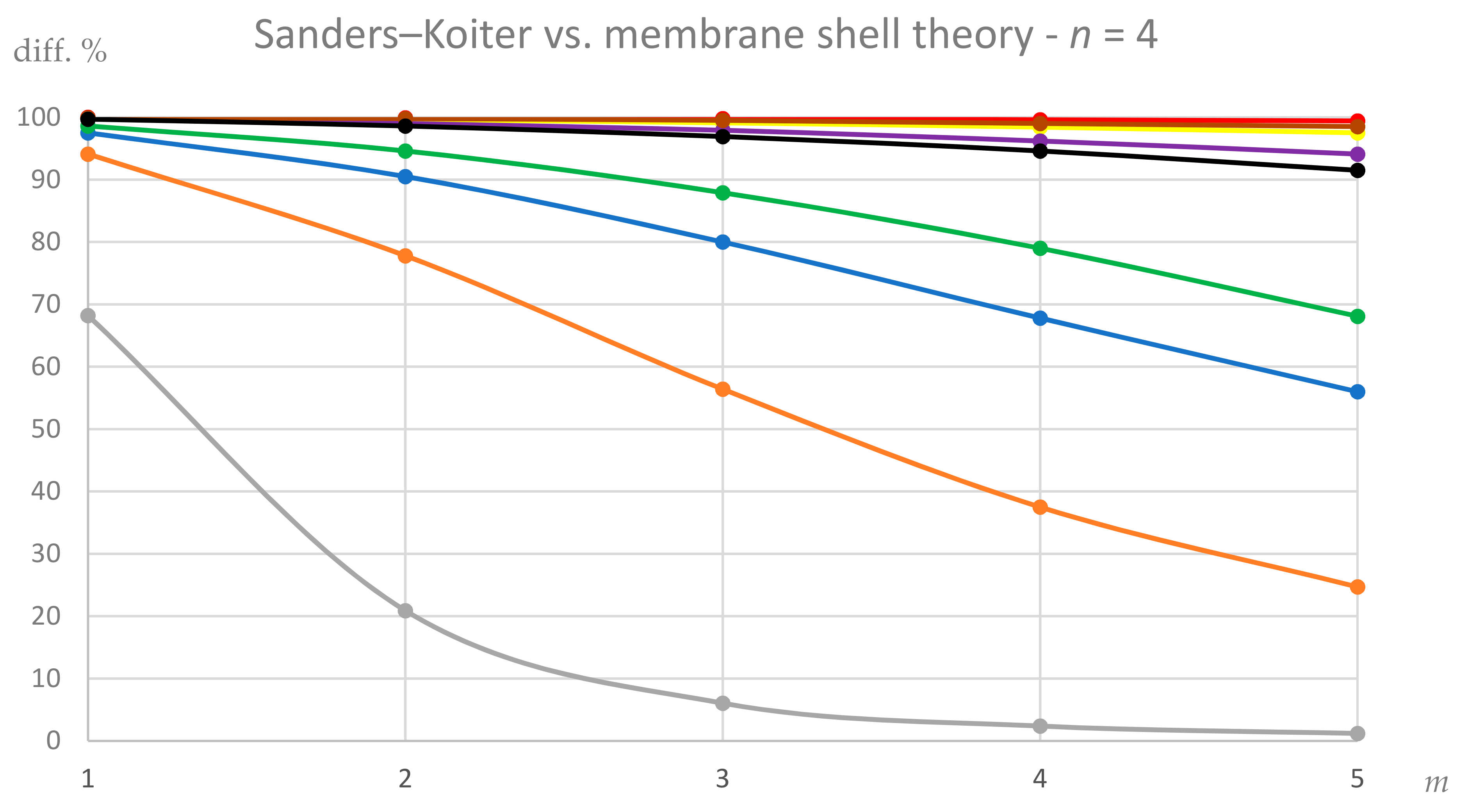
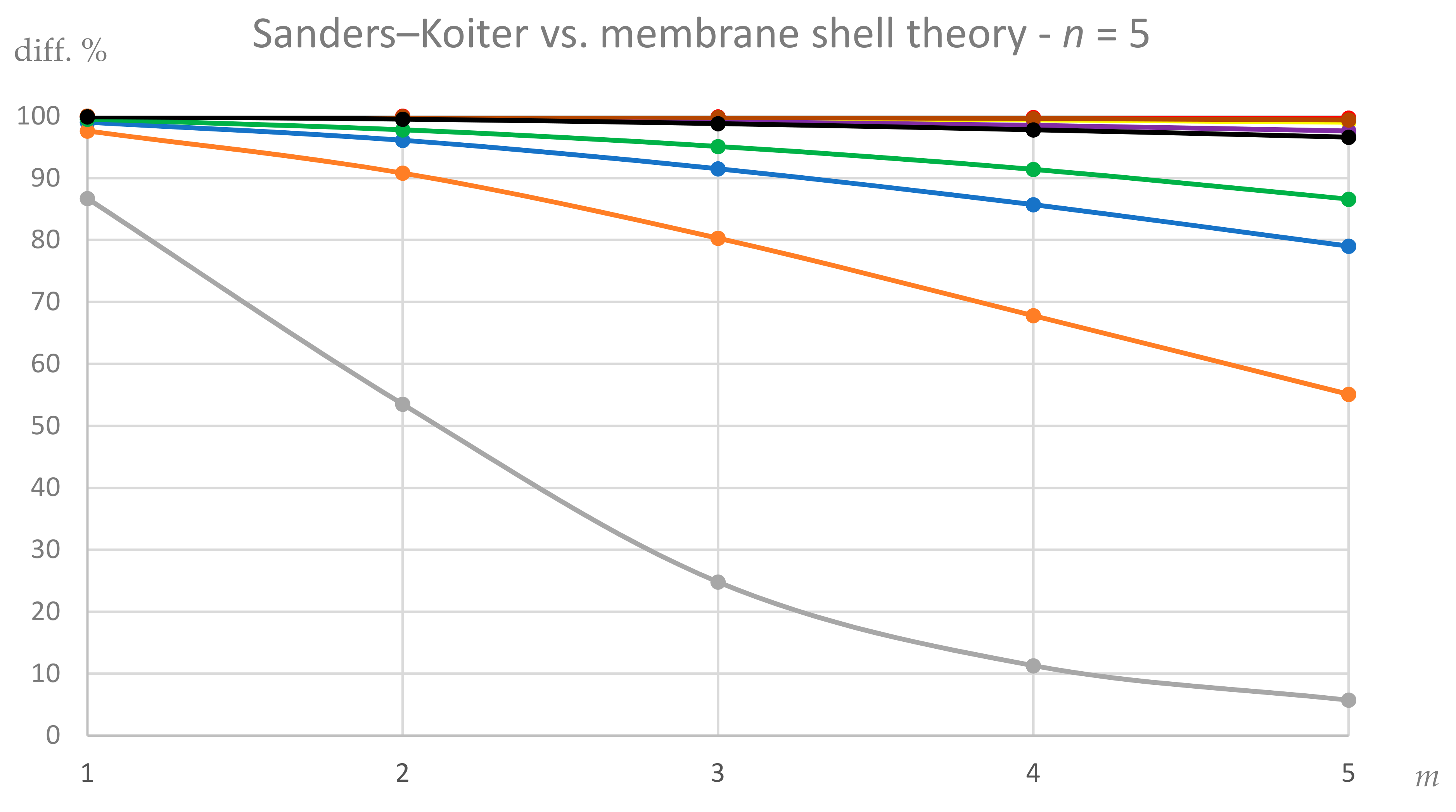
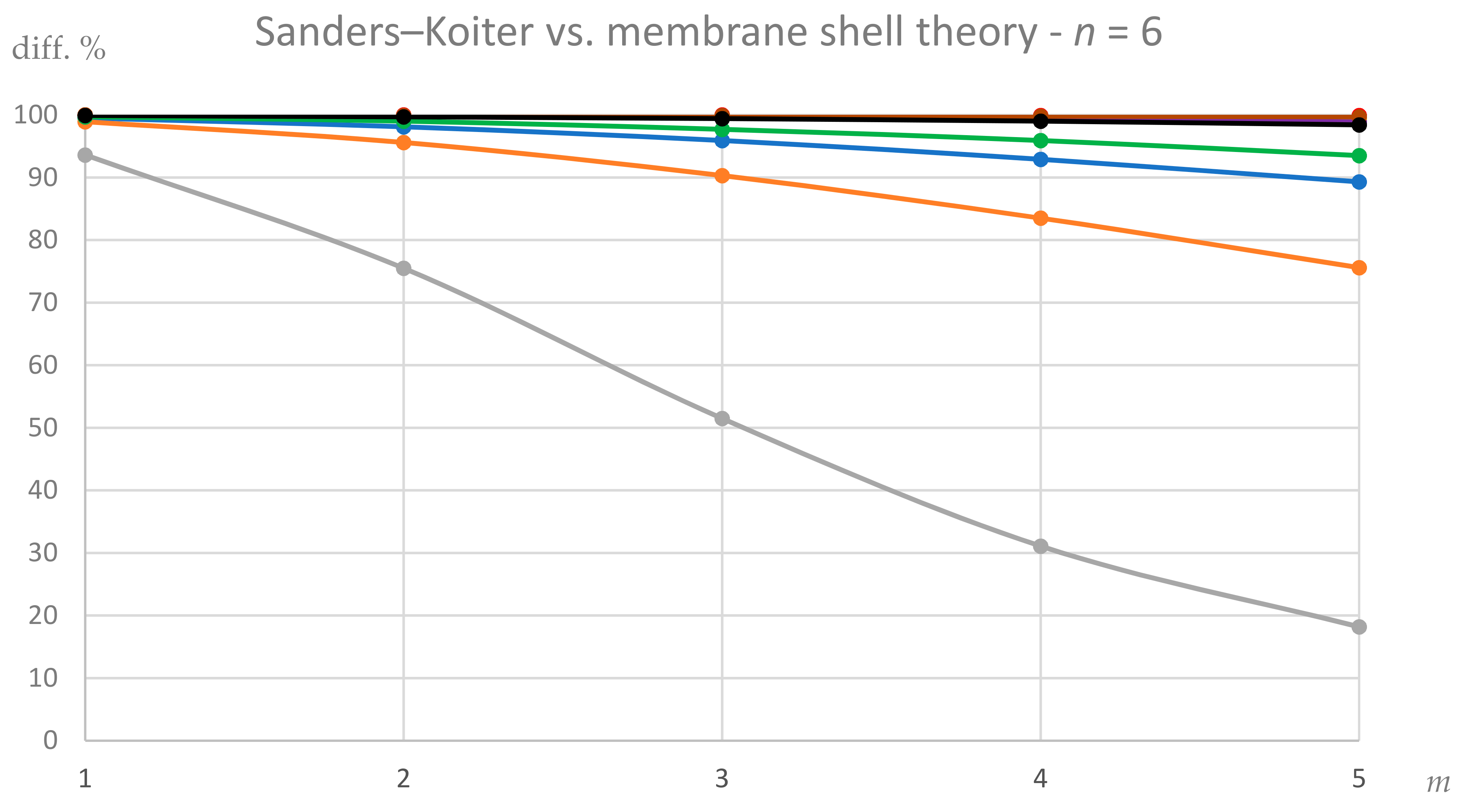
Figure 6, comparisons between extended Sanders–Koiter and simplified membrane shell theories are reported. From these comparisons, the following observations can be made:
by increasing the number of longitudinal half-waves m the percentage difference decreases (the contribution of the middle surface changes decreases);
by increasing the number of circumferential waves n the percentage difference increases (the contribution of the middle surface changes increases);
by increasing the aspect ratio L/R2 the percentage difference increases (the contribution of the middle surface changes increases);
by increasing the thickness ratio R2/h the percentage difference decreases (the contribution of the middle surface changes decreases).
Therefore, in case of shell-like modes, membrane shell theory yields satisfactory results only for relatively short and very thin DWCNTs, when the effect of middle surface changes in curvature and torsion is negligible (very small bending and torsional deformations) and the effect of middle surface strains results prevalent (very high stretching deformations).
Starting from the previous observations, the following results can be obtained:
the percentage difference decreases as the number of longitudinal half-waves m increases, the number of circumferential waves n decreases, the aspect ratio L/R2 decreases and the thickness ratio R2/h increases;
the minimum percentage difference is obtained at (m = 5, n = 2, L/R2 = 10, R2/h = 250) and is equal to 0.01;
the percentage difference increases as the number of longitudinal half-waves m decreases, the number of circumferential waves n increases, the aspect ratio L/R2 increases and the thickness ratio R2/h decreases;
the maximum percentage difference is obtained at (m = 1, n = 6, L/R2 = 100, R2/h = 25) and is equal to 100.
In
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
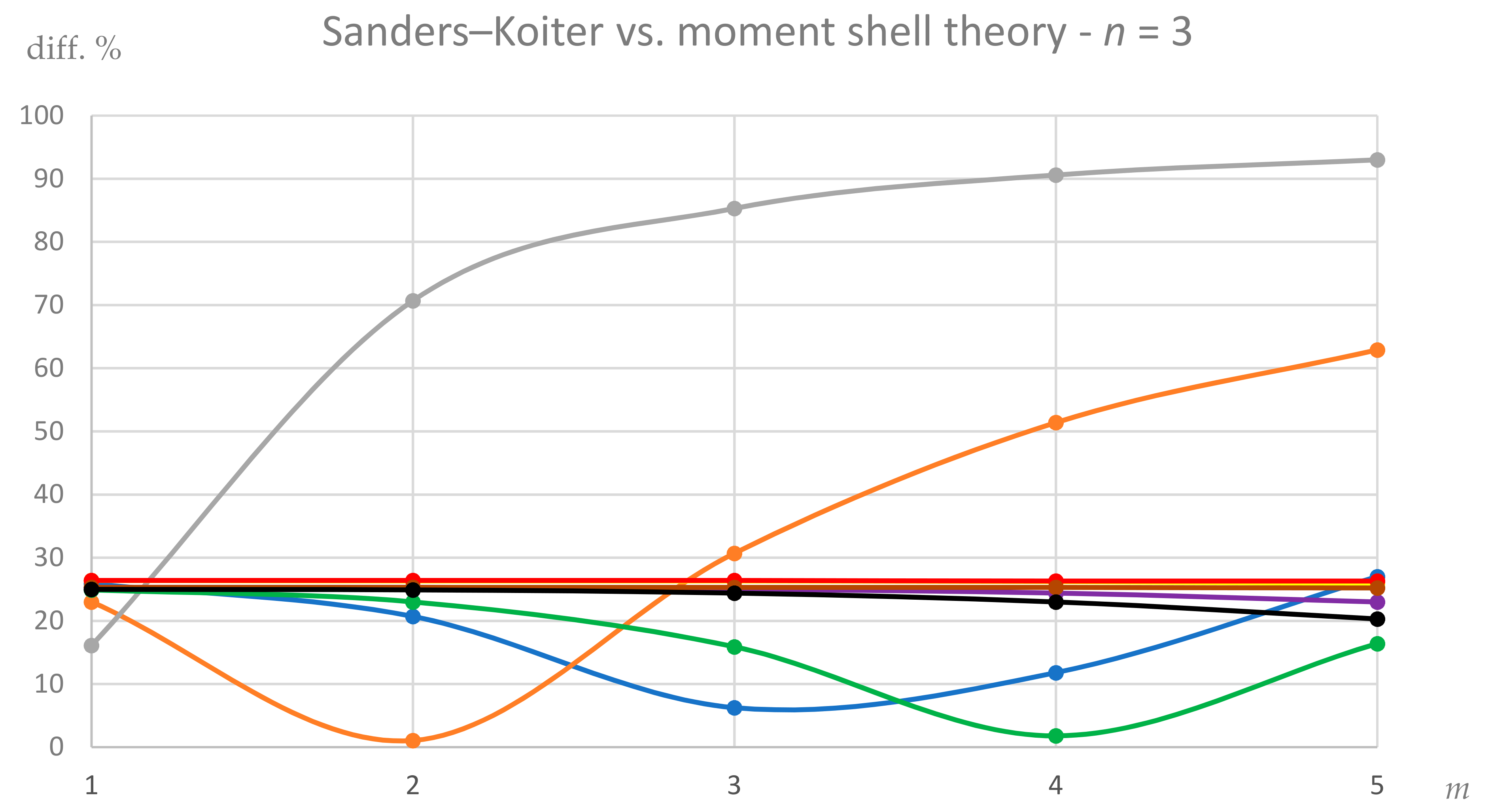
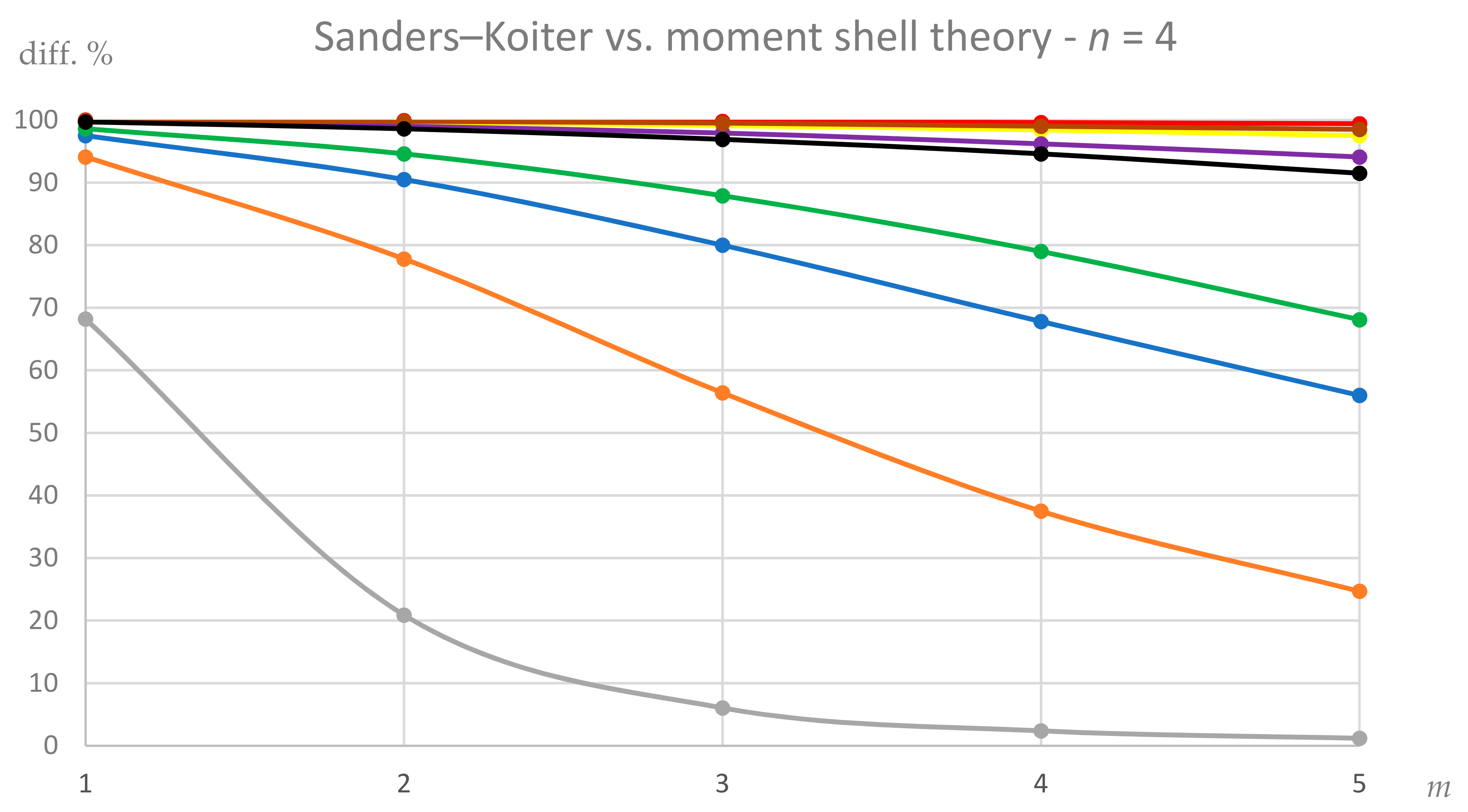
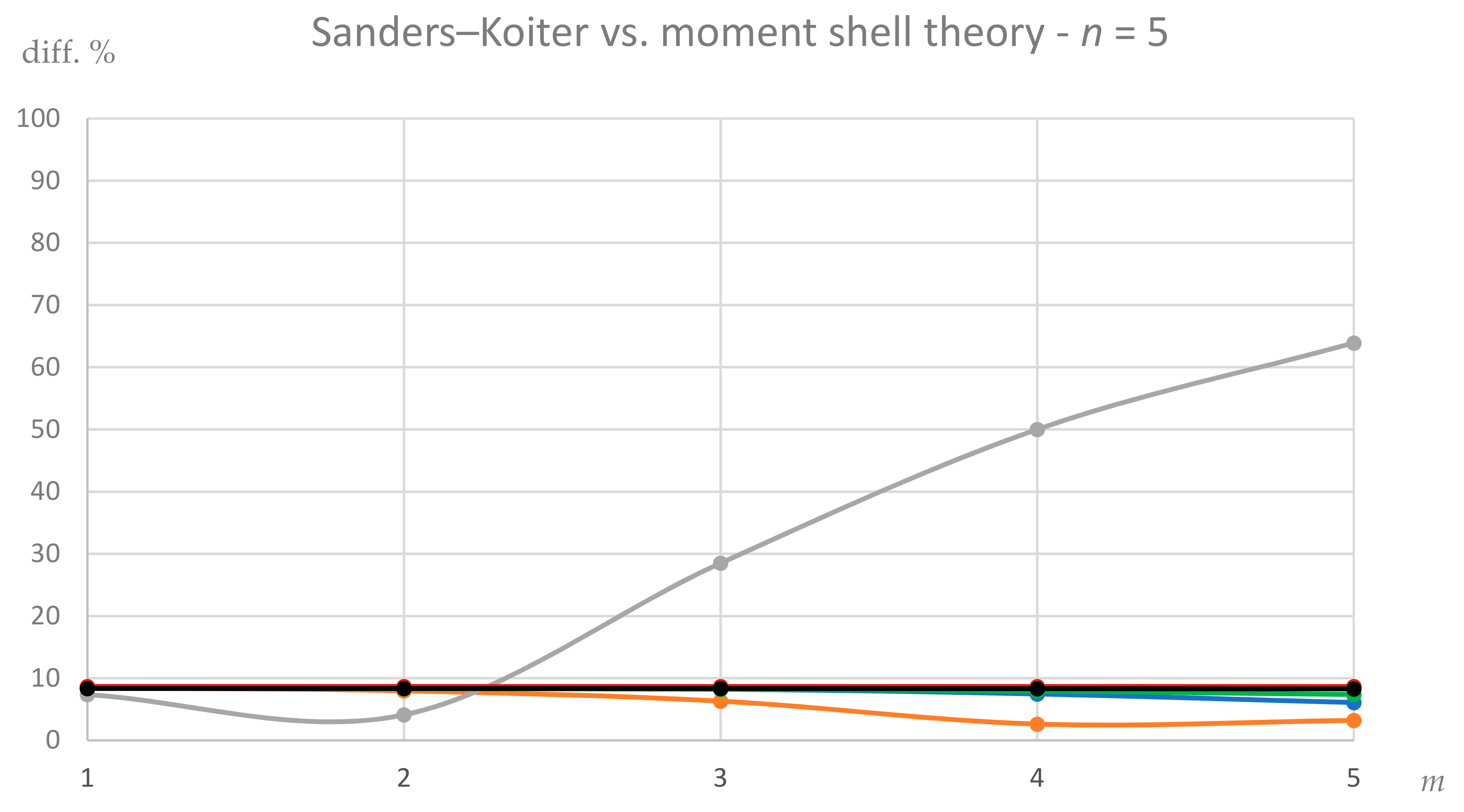
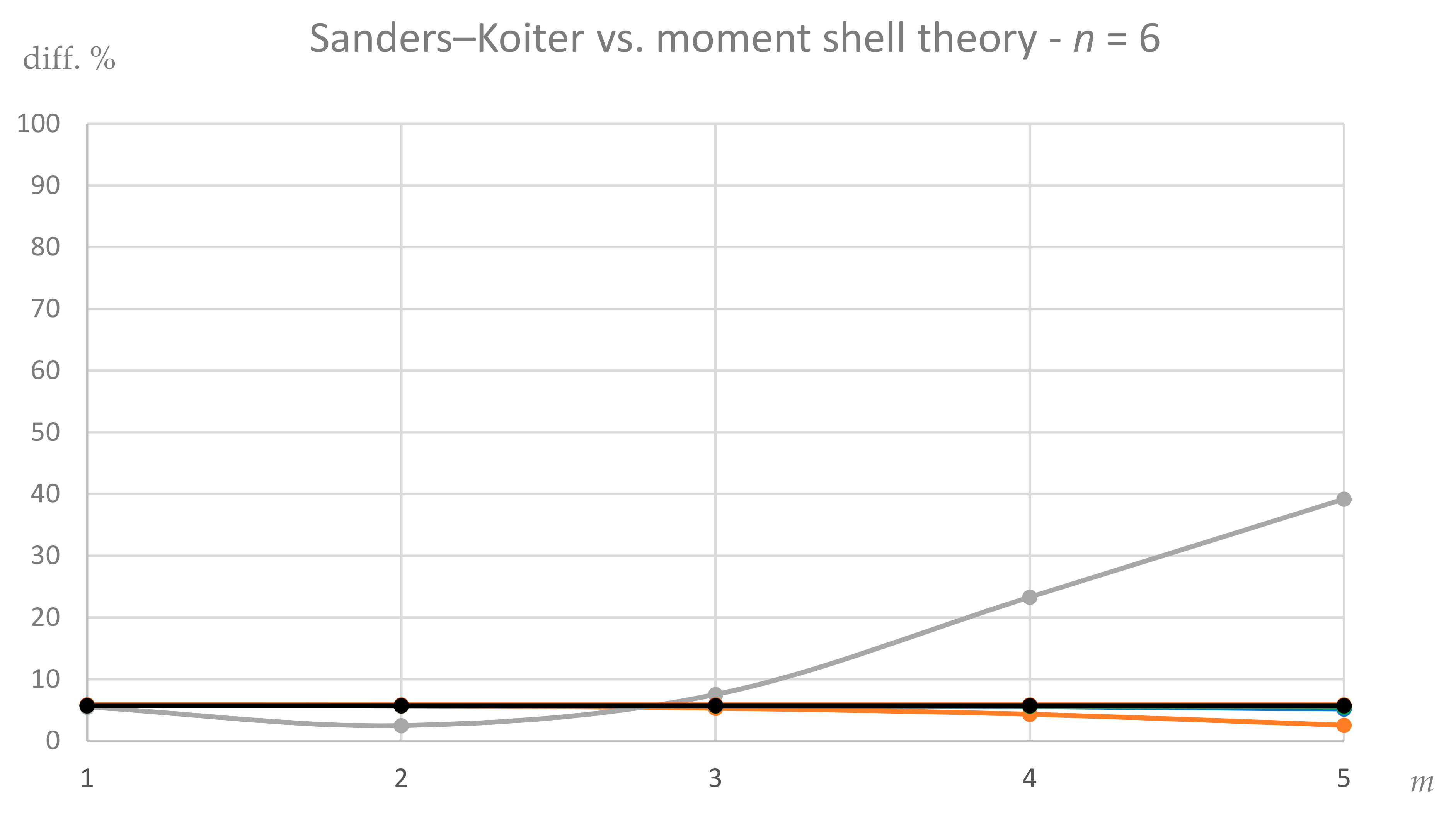
Figure 11, comparisons between extended Sanders–Koiter and simplified moment shell theories are reported. From these comparisons, the following observations can be made:
by increasing the aspect ratio L/R2 the percentage difference decreases (the contribution of the middle surface strains decreases);
by increasing the thickness ratio R2/h the percentage difference increases (the contribution of middle surface strains increases);
the curve showing maximum percentage difference corresponds to (L/R2 = 10, R2/h = 250);
the curve showing minimum percentage difference corresponds to (L/R2 = 100, R2/h = 25).
Therefore, in case of shell-like modes, moment shell theory yields satisfactory results only for very long and relatively thick DWCNTs, when the effect of middle surface strains is negligible (very small stretching deformations) and therefore the effect of middle surface changes in curvature and torsion is prevalent (very high bending/torsional deformations).
Starting from the previous observations, the following results can be obtained:
by increasing the number of longitudinal half-waves m the percentage difference of the curve (L/R2 = 10, R2/h = 250) showing maximum percentage difference increases (the contribution of the middle surface strains increases);
by increasing the number of circumferential waves n the percentage difference of the curve (L/R2 = 10, R2/h = 250) showing maximum percentage difference decreases (the contribution of the middle surface strains decreases);
the maximum percentage difference is obtained at (m = 5, n = 2, L/R2 = 10, R2/h = 250) and is equal to 97.6;
by increasing the number of longitudinal half-waves m the percentage difference of the curve (L/R2 = 100, R2/h = 25) showing maximum percentage difference is approximately constant (the contribution of the middle surface strains does not vary);
by increasing the number of circumferential waves n the percentage difference of the curve (L/R2 = 100, R2/h = 25) showing minimum percentage difference decreases (the contribution of the middle surface strains decreases);
the minimum percentage difference is obtained at (m = 1 ÷ 5, n = 6, L/R2 = 100, R2/h = 25) and is equal to 5.84.
These results clearly confirm the limitations of membrane and moment shell theories in shell-like vibration modelling of simply supported thin circular cylindrical shells reported in the literature. In particular, in Ventsel [
3] it is stated that “the area of application of the membrane theory of cylindrical shells is restricted by fairly short shells (
)” and “the accuracy of the membrane solution decreases with an increase in the shell length”. Moreover, in Soedel [
4] it is written that the membrane approximation “has some justification for shells and arches vibrating in shapes where the stretching of the middle surface is a dominating contributor to motion resistance” (extensional approximation) and “for thickness-to-radius ratios up to approximately
h/
R = 0.01 (i.e., for
R/
h ≥ 100), the membrane approximation gives very good results. Only when the shell starts to become a “thick” shell we see a pronounced effect of bending on the transverse natural frequencies. This is shown for
h/
R = 0.1 (i.e., for
R/
h ≤ 10)” (inextensional approximation).
From the computations it was found that, for shell-like modes, similarly to beam-like modes, all middle surface strains are not negligible. Moreover, it was obtained that, in the case of shell-like modes, the middle surface change in curvature along the circumferential direction increases with increasing the aspect L/R2 and thickness R2/h ratios, and so also this term must be taken into account within the model.
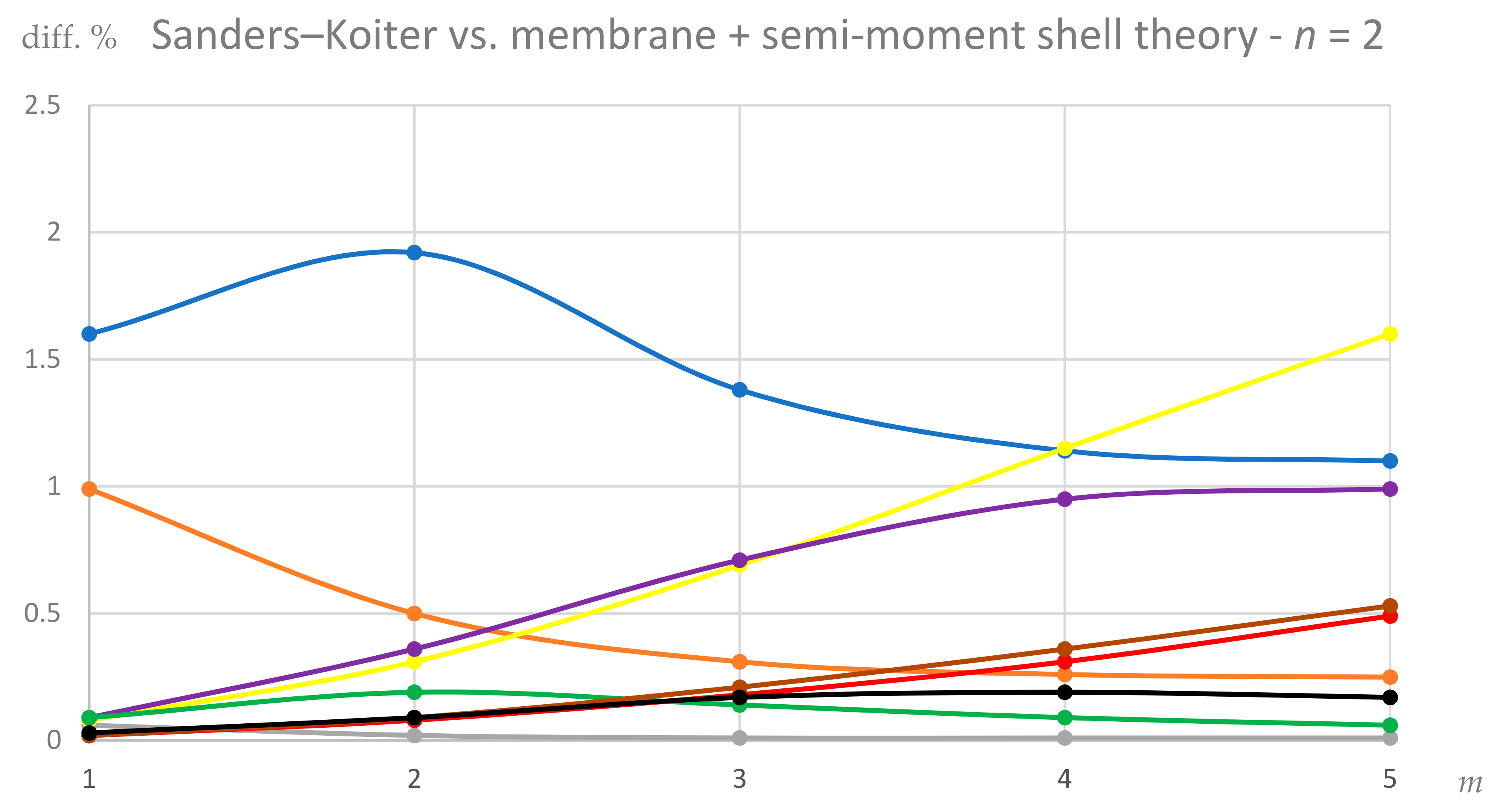
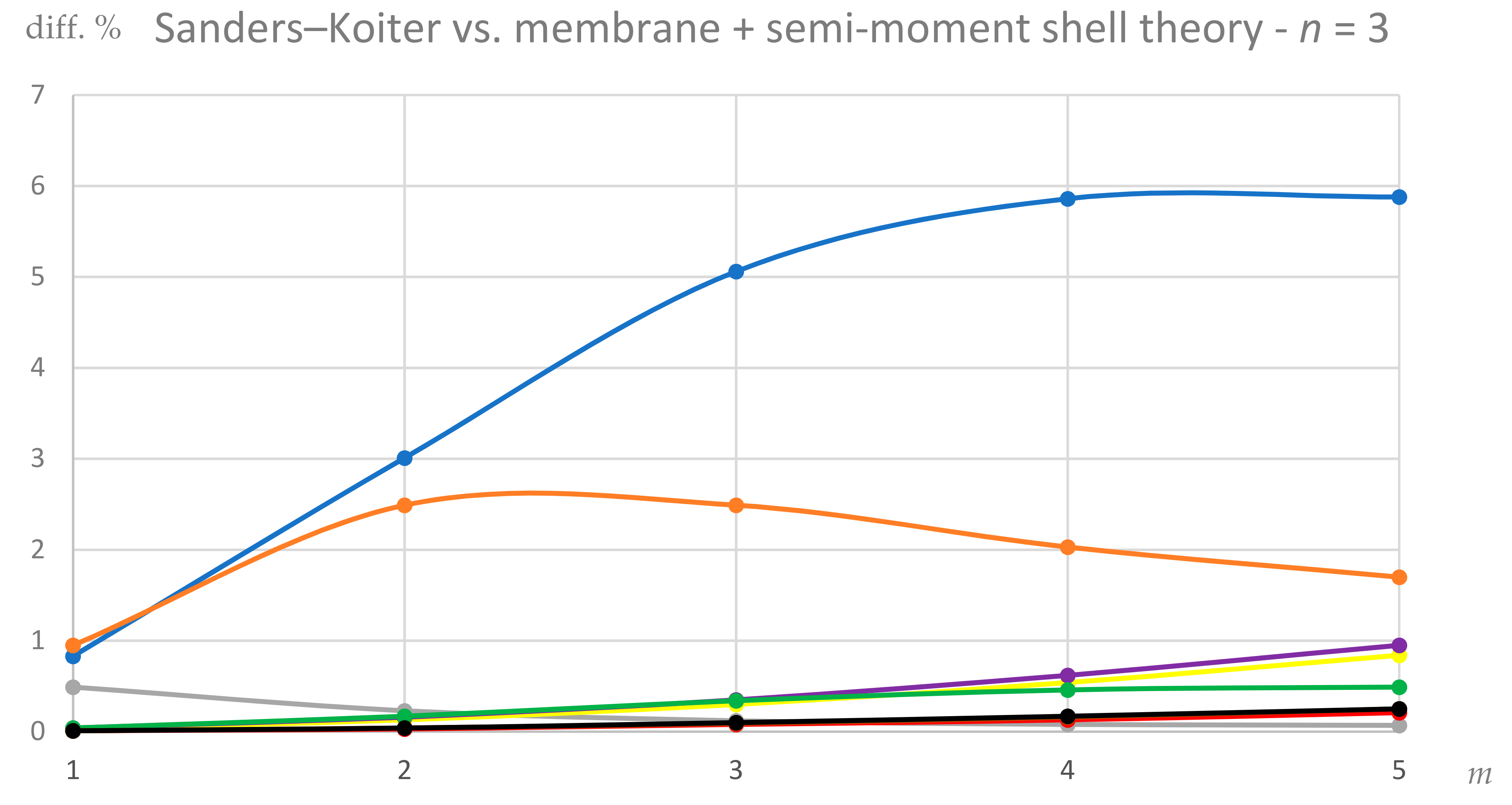
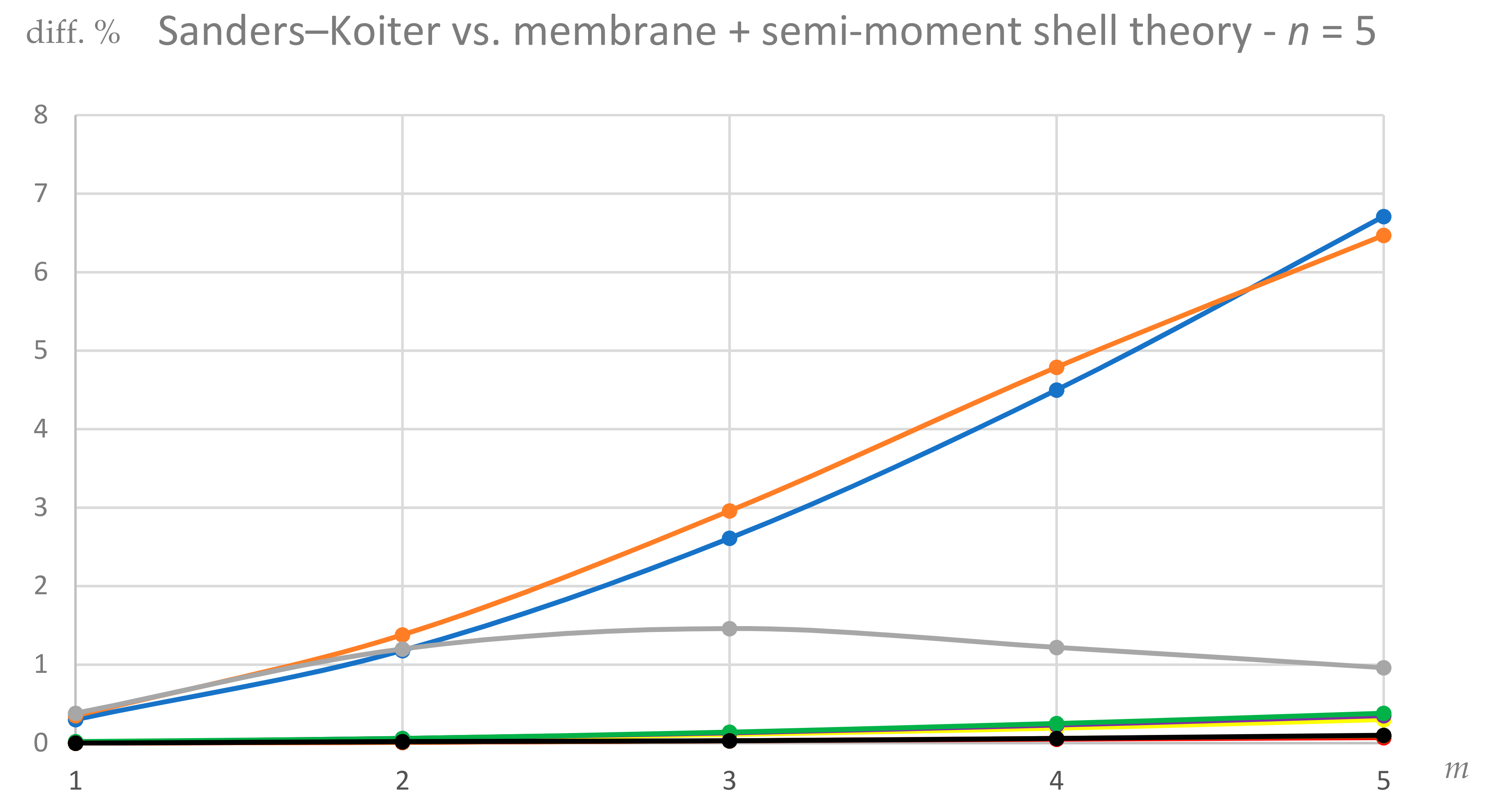
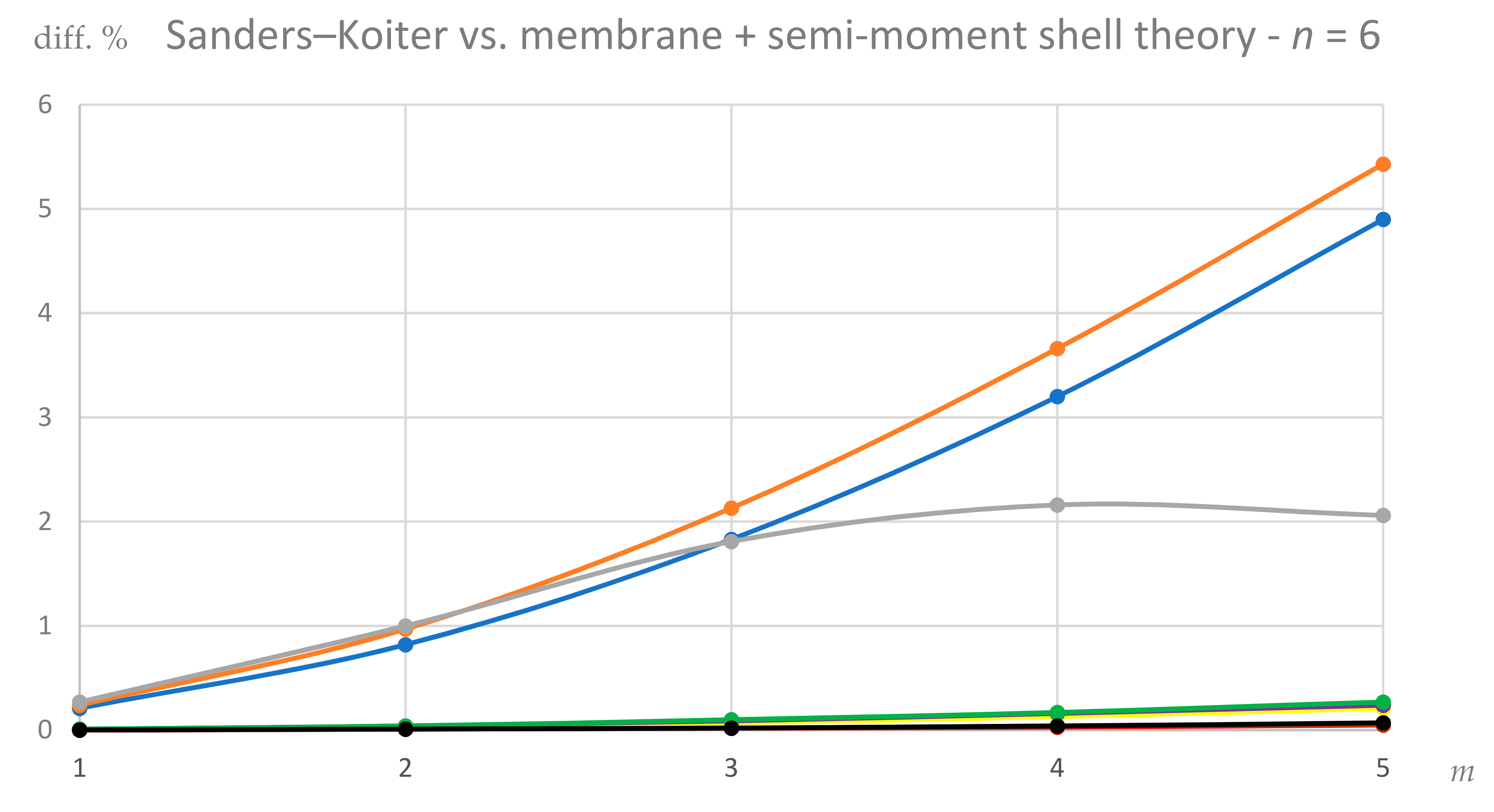
Therefore, starting from these results, a new simplified elastic shell model is proposed, based on a combination of the hypotheses of membrane and semi-moment shell theories, neglecting the middle surface terms and retaining the middle surface terms (four terms instead of six) within the expression of the elastic strain energy (12).
for a number of circumferential waves n = 2, the value of percentage difference is lower than 2 for every DWCNT geometry (L/R2, R2/h) and number of longitudinal half-waves m;
for n > 2, the percentage difference of relatively short DWCNTs (L/R2 = 10) increases with increasing m and n, while the percentage difference of sufficiently long DWCNTs (L/R2 ≥ 50) is quasi-constant with increasing m and decreases with increasing n, becoming negligible;
the maximum percentage difference of a relatively short (L/R2 = 10) and thick (R2/h = 25) DWCNT is obtained at (m = 5, n = 4) and is equal to 8.51;
the maximum percentage difference of a relatively short (L/R2 = 10) and thin (R2/h = 50) DWCNT is obtained at (m = 5, n = 5) and is equal to 6.47.
In all considered ranges, the new developed simplified elastic shell model, based on a combination of membrane and semi-moment shell theories, provides results in satisfactory agreement and lower computational effort than the extended Sanders–Koiter theory.
In particular, from the performed simulations, it was found that, for sufficiently long and thin DWCNTs (L/R2 ≥ 50, R2/h ≥ 50), the contribution of the middle surface change in curvature along the circumferential direction is strongly prevalent with respect to the ones of the middle surface strains ().
In addition, from the performed simulations, it was found that, for relatively thick DWCNTs (R2/h = 25), when the effect of the middle surface changes in curvature and torsion is prevalent, 80% of the difference between extended Sanders–Koiter shell theory and new developed simplified elastic shell model is provided by the middle surface change in torsion with respect to the change in curvature along the longitudinal direction .























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}