
An Optimized Random Forest Regression Model for Li-Ion Battery Prognostics and Health Management




Abstract
:1. Introduction
1.1. Review of the Methods for SOH
1.1.1. Direct Measurement
1.1.2. Model-Based Methods
1.1.3. Data-Driven Methods
1.2. Review of the Methods for RUL
1.2.1. Model-Based Methods
1.2.2. Data-Driven Methods
1.3. Contribution of the Paper
2. Aging Features for SOH and RUL
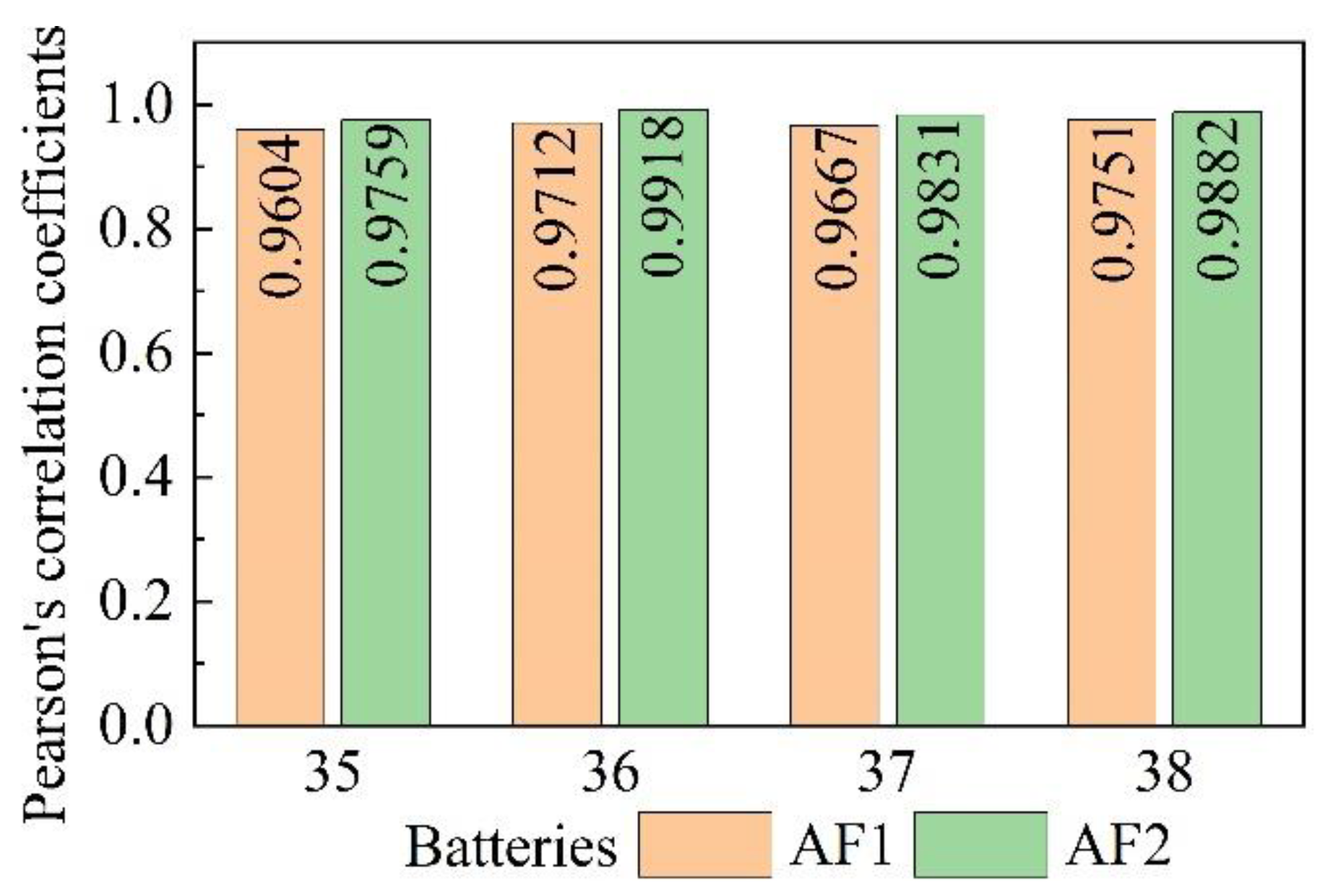
2.1. Battery Aging Datasets and Aging Features
2.2. The Extrapolation of the Aging Features
3. Methodologies
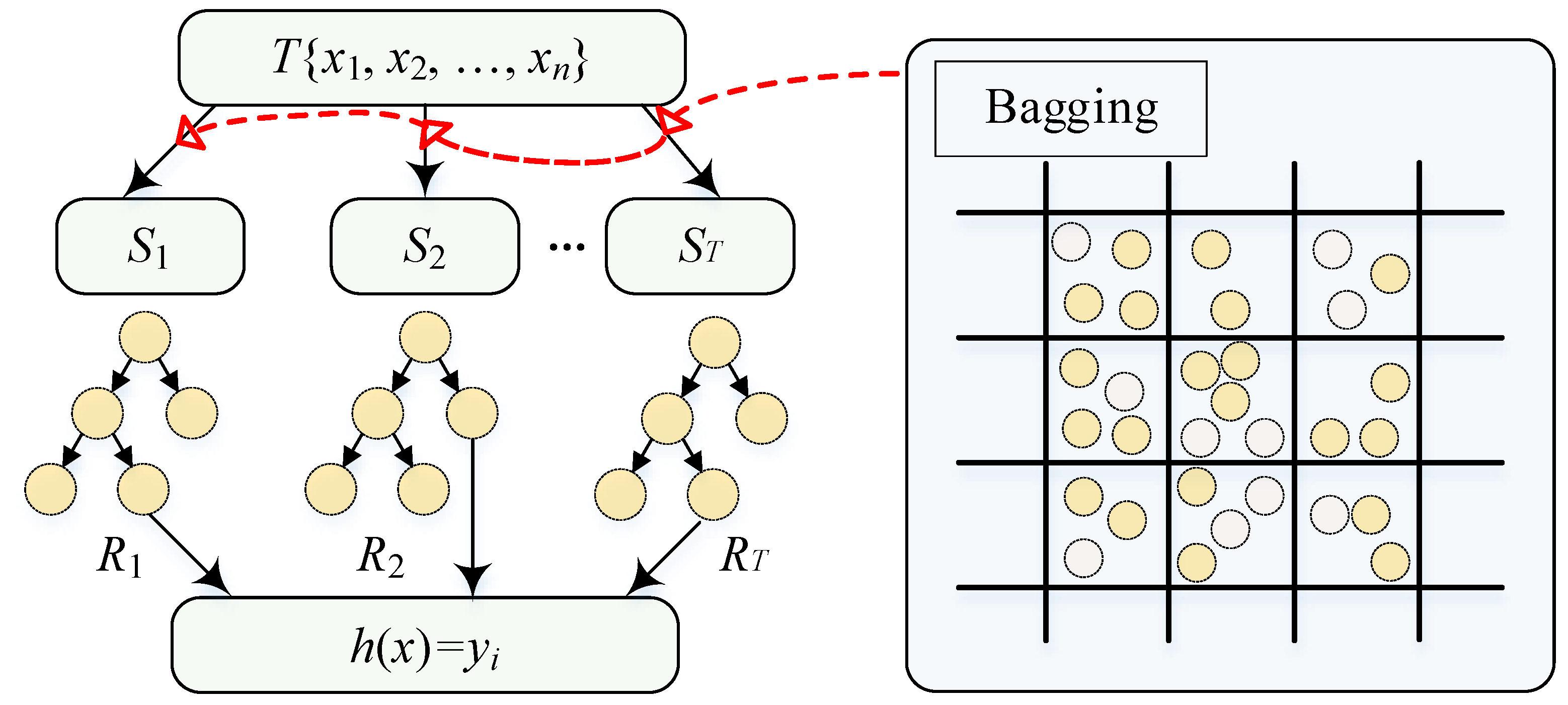
3.1. Random Forest Regression Optimization Model
3.2. Bayesian Optimization
| Algorithm 1: Bayesian optimization |
| for n=1, 2, …, do select new xn+1 by optimizing acquisition function α query objective function to obtain yn+1 update statistical model end for |
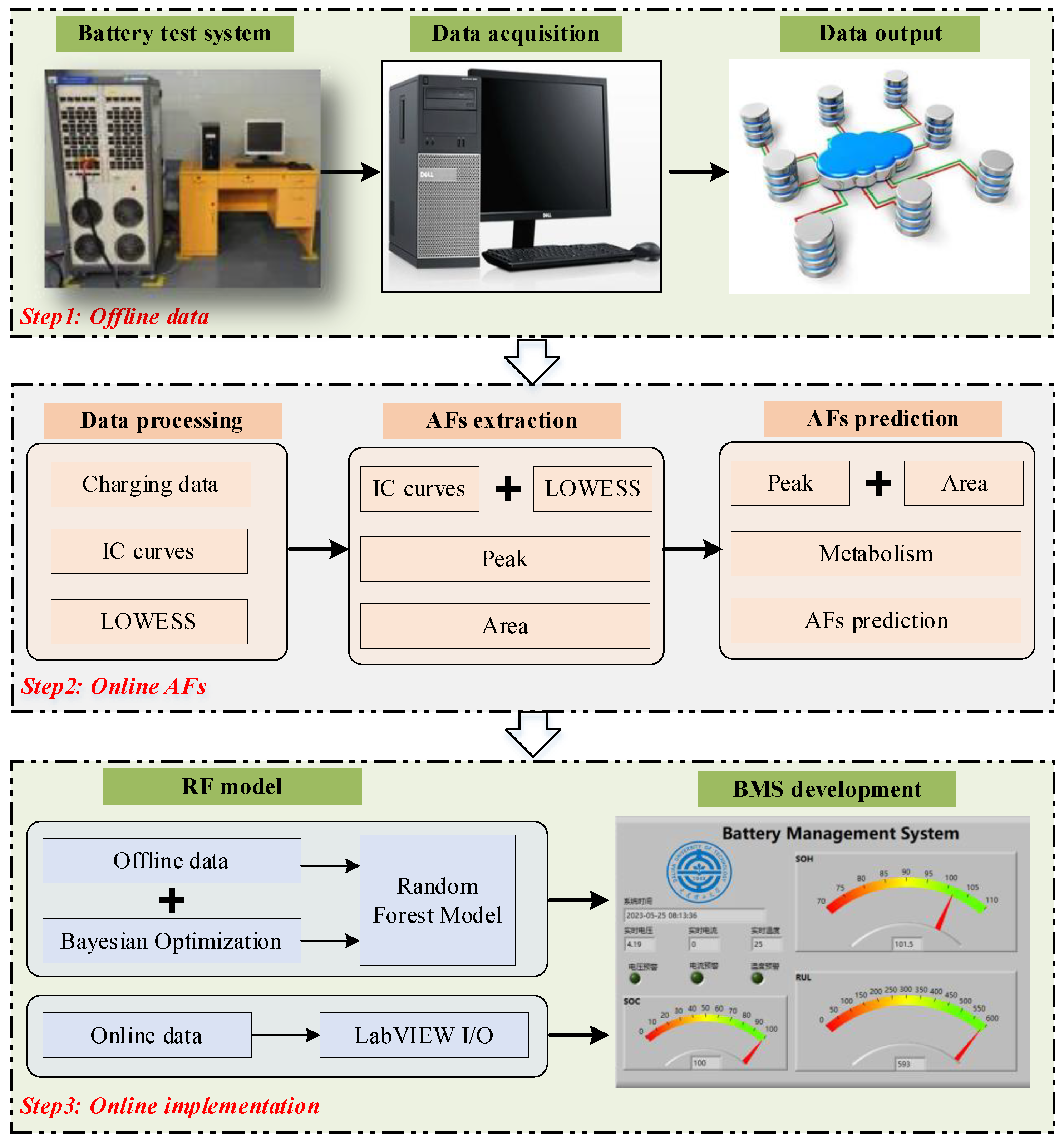
3.3. The Flowchart for SOH and RUL
4. Results and Discussion
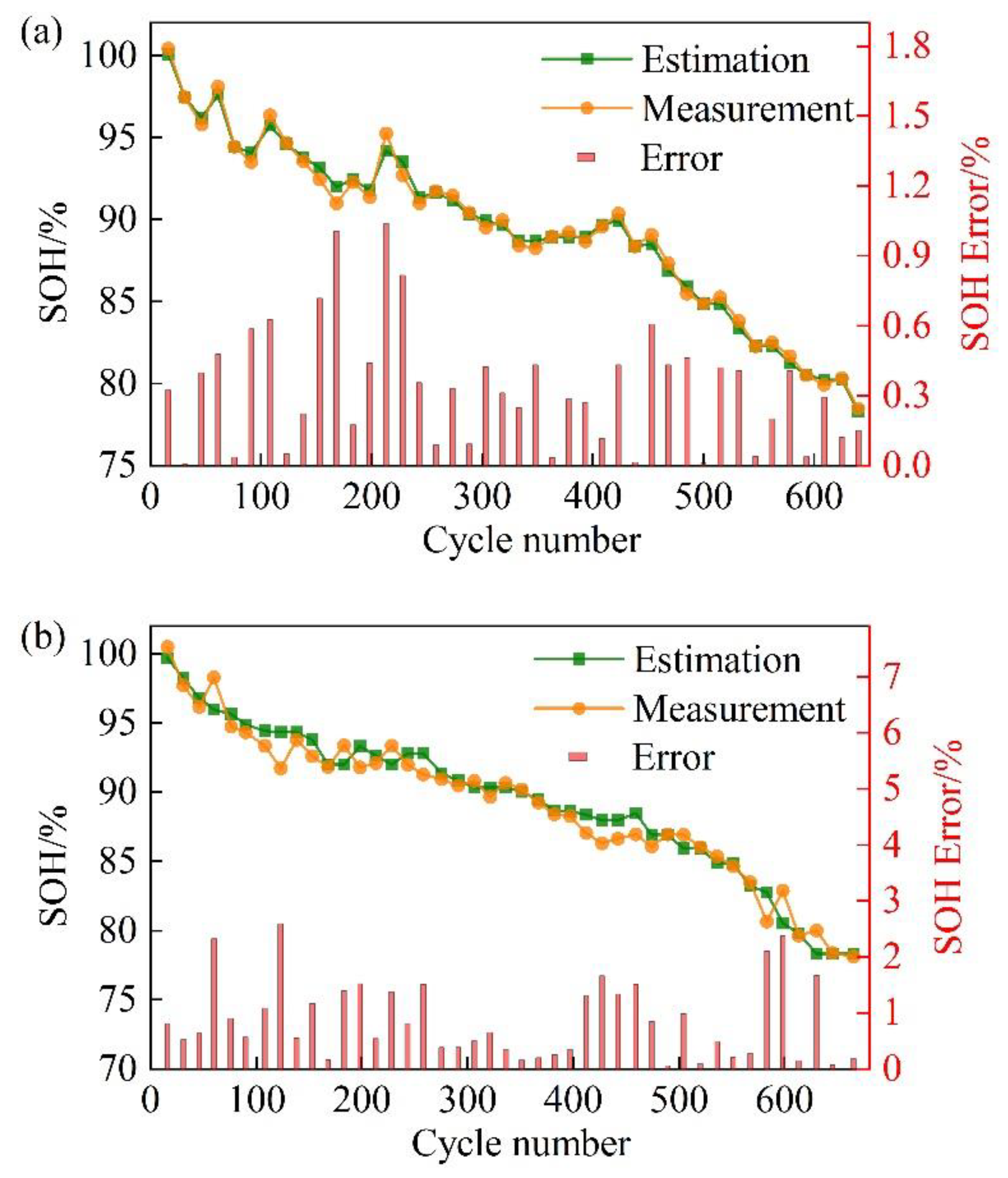
4.1. SOH Estimation
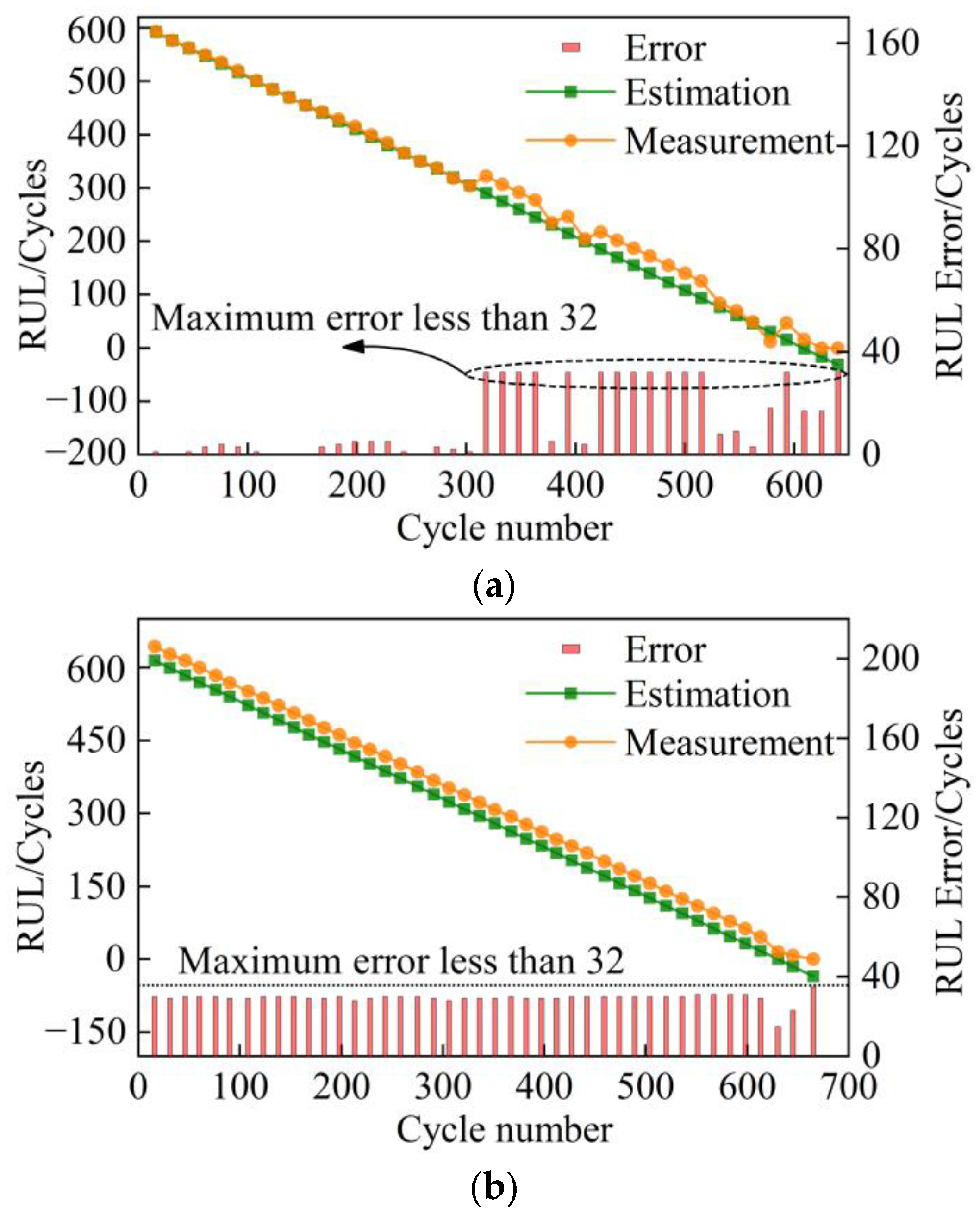
4.2. RUL Prediction
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| EV | Electric vehicle |
| PHM | Prognostics and health management |
| SOH | State of health |
| RUL | Remaining useful life |
| EM | Electrochemical model |
| ECM | Equivalent circuit model |
| PF | Particle filter |
| SOC | State of charge |
| EKF | Extended Kalman filter |
| AF | Aging feature |
| BO | Bayesian optimization |
| BMS | Battery management system |
| RF | Random forest |
| SVR | Support vector regression |
| EIS | Electrochemical impedance spectroscopy |
| RVM | Relevance vector machine |
| ELM | Extreme learning machine |
| ICC | Incremental capacity curve |
| ICA | Incremental capacity analysis |
| PSO | Particle swarm optimization |
| LOWESS | Locally weighted scatterplot smoothing |
| PICC | Peak of the incremental capacity curve |
| CCEV | Charged capacity of equal voltage |
| BPNN | Back propagation neural networks |
References
- Li, X.; Yuan, C.; Wang, Z.; He, J.; Yu, S. Lithium battery state-of-health estimation and remaining useful lifetime prediction based on non-parametric aging model and particle filter algorithm. eTransportation 2022, 11, 100156. [Google Scholar] [CrossRef]
- Yu, Q.; Huang, Y.; Tang, A.; Wang, C.; Shen, W. Ocv-soc-temperature relationship construction and state of charge estimation for a series—parallel lithium-ion battery pack. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6362–6371. [Google Scholar] [CrossRef]
- Guo, Y.; Yang, D.; Zhao, K.; Wang, K. State of health estimation for lithium-ion battery based on bi-directional long short-term memory neural network and attention mechanism. Energy Rep. 2022, 8, 208–215. [Google Scholar] [CrossRef]
- Yu, Q.; Liu, Y.; Long, S.; Jin, X.; Li, J.; Shen, W. A branch current estimation and correction method for a parallel connected battery system based on dual bp neural networks. Green Energy Intell. Transp. 2022, 1, 100029. [Google Scholar] [CrossRef]
- Lin, D.; Zhang, X.; Wang, L.; Zhao, B. State of health estimation of lithium-ion batteries based on a novel indirect health indicator. Energy Rep. 2022, 8, 606–613. [Google Scholar] [CrossRef]
- Wang, C.; Yu, C.; Guo, W.; Wang, Z.; Tan, J. Identification of typical sub-health state of traction battery based on a data-driven approach. Batteries 2022, 8, 65. [Google Scholar] [CrossRef]
- Zhao, J.; Burke, A.F. Electric vehicle batteries: Status and perspectives of data-driven diagnosis and prognosis. Batteries 2022, 8, 142. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Liu, X.; Rao, J.; Fan, Y.; Tan, X. Online state of health estimation for lithium-ion batteries based on a dual self-attention multivariate time series prediction network. Energy Rep. 2022, 8, 8953–8964. [Google Scholar] [CrossRef]
- Wang, Z.; Feng, G.; Zhen, D.; Gu, F.; Ball, A. A review on online state of charge and state of health estimation for lithium-ion batteries in electric vehicles. Energy Rep. 2021, 7, 5141–5161. [Google Scholar] [CrossRef]
- Wang, S.; Jin, S.; Bai, D.; Fan, Y.; Shi, H.; Fernandez, C. A critical review of improved deep learning methods for the remaining useful life prediction of lithium-ion batteries. Energy Rep. 2021, 7, 5562–5574. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, J.; Cao, D.; Egardt, B. Battery health prognosis for electric vehicles using sample entropy and sparse bayesian predictive modeling. IEEE Trans. Ind. Electron. 2016, 63, 2645–2656. [Google Scholar] [CrossRef]
- Kuipers, M.; Schröer, P.; Nemeth, T.; Zappen, H.; Blömeke, A.; Sauer, D.U. An algorithm for an online electrochemical impedance spectroscopy and battery parameter estimation: Development, verification and validation. J. Energy Storage 2020, 30, 101517. [Google Scholar] [CrossRef]
- Li, J.; Adewuyi, K.; Lotfi, N.; Landers, R.G.; Park, J. A single particle model with chemical/mechanical degradation physics for lithium ion battery state of health (soh) estimation. Appl. Energy 2018, 212, 1178–1190. [Google Scholar] [CrossRef]
- Du, X.; Meng, J.; Zhang, Y.; Huang, X.; Wang, S.; Liu, P.; Liu, T. An information appraisal procedure: Endows reliable online parameter identification to lithium-ion battery model. IEEE Trans. Ind. Electron. 2022, 69, 5889–5899. [Google Scholar] [CrossRef]
- Bi, Y.; Yin, Y.; Choe, S. Online state of health and aging parameter estimation using a physics-based life model with a particle filter. J. Power Sources 2020, 476, 228655. [Google Scholar] [CrossRef]
- Allam, A.; Onori, S. Online capacity estimation for lithium-ion battery cells via an electrochemical model-based adaptive interconnected observer. IEEE Trans. Control Syst. Technol. 2021, 29, 1636–1651. [Google Scholar] [CrossRef]
- Yu, Q.; Dai, L.; Xiong, R.; Chen, Z.; Zhang, X.; Shen, W. Current sensor fault diagnosis method based on an improved equivalent circuit battery model. Appl. Energy 2022, 310, 118588. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.; Ma, H.; Li, S.E. Combined state of charge and state of health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Lyu, Z.; Gao, R. A model-based and data-driven joint method for state-of-health estimation of lithium-ion battery in electric vehicles. Int. J. Energy Res. 2019, 43, 7956–7969. [Google Scholar] [CrossRef]
- Vanem, E.; Salucci, C.B.; Bakdi, A.; Alnes, Ø.Å.S. Data-driven state of health modelling—A review of state of the art and reflections on applications for maritime battery systems. J. Energy Storage 2021, 43, 103158. [Google Scholar] [CrossRef]
- Hamar, J.C.; Erhard, S.V.; Canesso, A.; Kohlschmidt, J.; Olivain, N.; Jossen, A. State-of-health estimation using a neural network trained on vehicle data. J. Power Sources 2021, 512, 230493. [Google Scholar] [CrossRef]
- Pradyumna, T.K.; Cho, K.; Kim, M.; Choi, W. Capacity estimation of lithium-ion batteries using convolutional neural network and impedance spectra. J. Power Electron. 2022, 22, 850–858. [Google Scholar] [CrossRef]
- Zhang, W.; Li, X.; Li, X. Deep learning-based prognostic approach for lithium-ion batteries with adaptive time-series prediction and on-line validation. Measurement 2020, 164, 108052. [Google Scholar] [CrossRef]
- Pan, W.; Luo, X.; Zhu, M.; Ye, J.; Gong, L.; Qu, H. A health indicator extraction and optimization for capacity estimation of li-ion battery using incremental capacity curves. J. Energy Storage 2021, 42, 103072. [Google Scholar] [CrossRef]
- Wu, J.; Fang, L.; Meng, J.; Lin, M.; Dong, G. Optimized multi-source fusion based state of health estimation for lithium-ion battery in fast charge applications. IEEE Trans. Energy Convers. 2022, 37, 1489–1498. [Google Scholar] [CrossRef]
- Duong, P.L.T.; Raghavan, N. Heuristic kalman optimized particle filter for remaining useful life prediction of lithium-ion battery. Microelectron. Reliab. 2018, 81, 232–243. [Google Scholar] [CrossRef]
- Wei, J.; Dong, G.; Chen, Z. Remaining useful life prediction and state of health diagnosis for lithium-ion batteries using particle filter and support vector regression. IEEE Trans. Ind. Electron. 2018, 65, 5634–5643. [Google Scholar] [CrossRef]
- Downey, A.; Lui, Y.; Hu, C.; Laflamme, S.; Hu, S. Physics-based prognostics of lithium-ion battery using non-linear least squares with dynamic bounds. Reliab. Eng. Syst. Saf. 2019, 182, 1–12. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, J.; Li, K.; Lv, C. The remaining useful life prediction by using electrochemical model in the particle filter framework for lithium-ion batteries. IEEE Access 2020, 8, 126661–126670. [Google Scholar] [CrossRef]
- Hu, X.; Xu, L.; Lin, X.; Pecht, M. Battery lifetime prognostics. Joule 2020, 4, 310–346. [Google Scholar] [CrossRef]
- Afshari, S.S.; Cui, S.; Xu, X.; Liang, X. Remaining useful life early prediction of batteries based on the differential voltage and differential capacity curves. IEEE Trans. Instrum. Meas. 2022, 71, 6500709. [Google Scholar] [CrossRef]
- Feng, H.; Song, D. A health indicator extraction based on surface temperature for lithium-ion batteries remaining useful life prediction. J. Energy Storage 2021, 34, 102118. [Google Scholar] [CrossRef]
- Yao, F.; He, W.; Wu, Y.; Ding, F.; Meng, D. Remaining useful life prediction of lithium-ion batteries using a hybrid model. Energy 2022, 248, 123622. [Google Scholar] [CrossRef]
- Lyu, Z.; Gao, R.; Li, X. A partial charging curve-based data-fusion-model method for capacity estimation of li-ion battery. J. Power Sources 2021, 483, 229131. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Wang, Z. State of health estimation for li-ion battery via partial incremental capacity analysis based on support vector regression. Energy 2020, 203, 117852. [Google Scholar] [CrossRef]
- Lyu, Z.; Wang, G.; Gao, R. Synchronous state of health estimation and remaining useful lifetime prediction of li-ion battery through optimized relevance vector machine framework. Energy 2022, 251, 123852. [Google Scholar]
- Li, Y.; Zou, C.; Berecibar, M.; Nanini-Maury, E.; Chan, J.C.W.; van den Bossche, P.; Van Mierlo, J.; Omar, N. Random forest regression for online capacity estimation of lithium-ion batteries. Appl. Energy 2018, 232, 197–210. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.; Zhang, H.; Xiong, L.; Lei, H.; Deng, S. Hyperparameter optimization for machine learning models based on bayesian optimizationb. J. Electron. Sci. Technol. 2019, 17, 26–40. [Google Scholar]
- Lin, H.; Kang, L.; Xie, D.; Linghu, J.; Li, J. Online state-of-health estimation of lithium-ion battery based on incremental capacity curve and bp neural network. Batteries 2022, 8, 29. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | MAE (%) | RMSE |
|---|---|---|
| CS 35 | 1.0379 | 0.4185 |
| CS 37 | 2.5925 | 1.0976 |
| Mean | 1.8152 | 0.7581 |
| Index | MAE (Cycle) | RMSE |
|---|---|---|
| CS 35 | 32 | 20.3961 |
| CS 37 | 32 | 29.3198 |
| Mean | 32 | 24.8580 |
| Batteries | Index | Mean MAE | Mean RMSE |
|---|---|---|---|
| BPNN | SOH estimation | 2.6138 | 1.0838 |
| RUL prediction | 33.5 | 28.2835 | |
| SVM | SOH estimation | 3.1786 | 1.3333 |
| RUL prediction | 33.5 | 33.5 | |
| RF | SOH estimation | 2.7293 | 1.1627 |
| RUL prediction | 33.5 | 30.6125 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Lyu, Z.; Li, X. An Optimized Random Forest Regression Model for Li-Ion Battery Prognostics and Health Management. Batteries 2023, 9, 332. https://doi.org/10.3390/batteries9060332
Wang G, Lyu Z, Li X. An Optimized Random Forest Regression Model for Li-Ion Battery Prognostics and Health Management. Batteries. 2023; 9(6):332. https://doi.org/10.3390/batteries9060332
Chicago/Turabian StyleWang, Geng, Zhiqiang Lyu, and Xiaoyu Li. 2023. "An Optimized Random Forest Regression Model for Li-Ion Battery Prognostics and Health Management" Batteries 9, no. 6: 332. https://doi.org/10.3390/batteries9060332
APA StyleWang, G., Lyu, Z., & Li, X. (2023). An Optimized Random Forest Regression Model for Li-Ion Battery Prognostics and Health Management. Batteries, 9(6), 332. https://doi.org/10.3390/batteries9060332