Author Contributions
Conceptualization, K.H. and C.H.; methodology, software, data curation, formal analysis, C.H.; validation, K.H. and C.H.; investigation, C.H.; resources, K.H. and C.H.; writing—original draft preparation, C.H., writing—review and editing, K.H.; visualization, C.H.; supervision, A.S. and K.H.; project administration, funding acquisition, K.H. All authors have read and agreed to the published version of the manuscript.
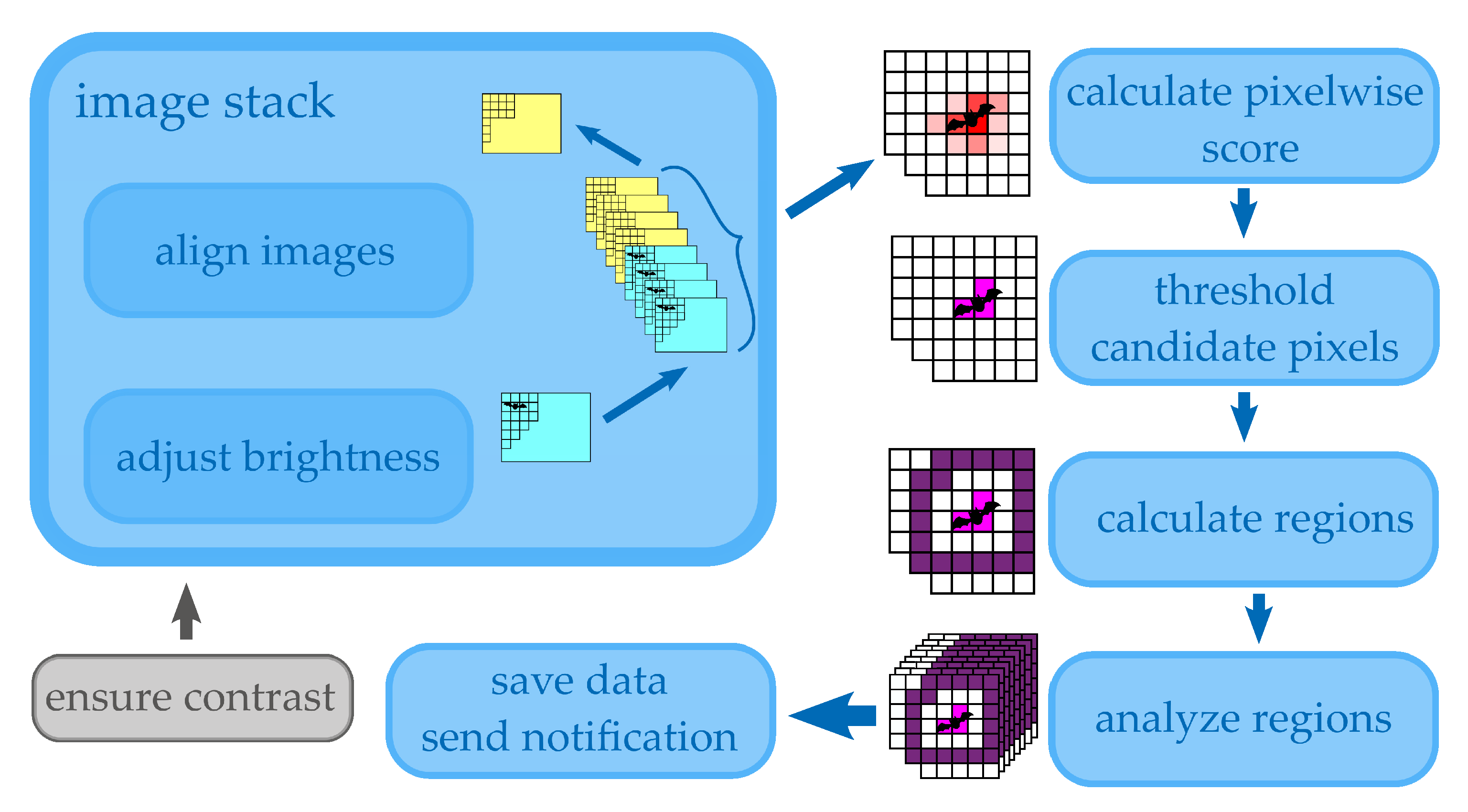
Figure 1.
Main steps of developed image processing software (blue) plus contrast as main hardware requirement (gray).
Figure 1.
Main steps of developed image processing software (blue) plus contrast as main hardware requirement (gray).
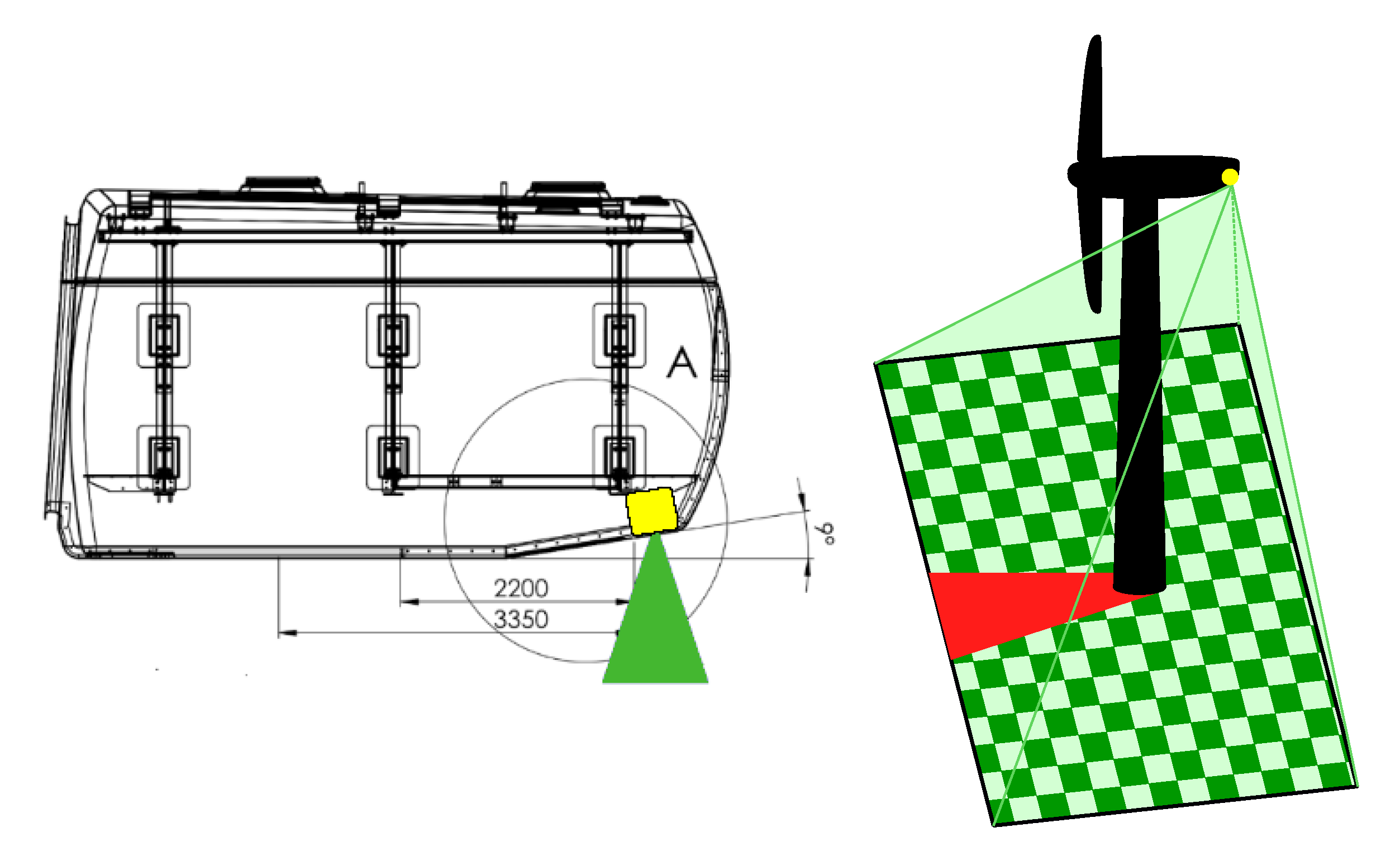
Figure 2.
Camera system is mounted on back of nacelle (left) and senses area underneath wind turbine (right). Tower produces a dead corner which cannot be recorded by system (red projection).
Figure 2.
Camera system is mounted on back of nacelle (left) and senses area underneath wind turbine (right). Tower produces a dead corner which cannot be recorded by system (red projection).
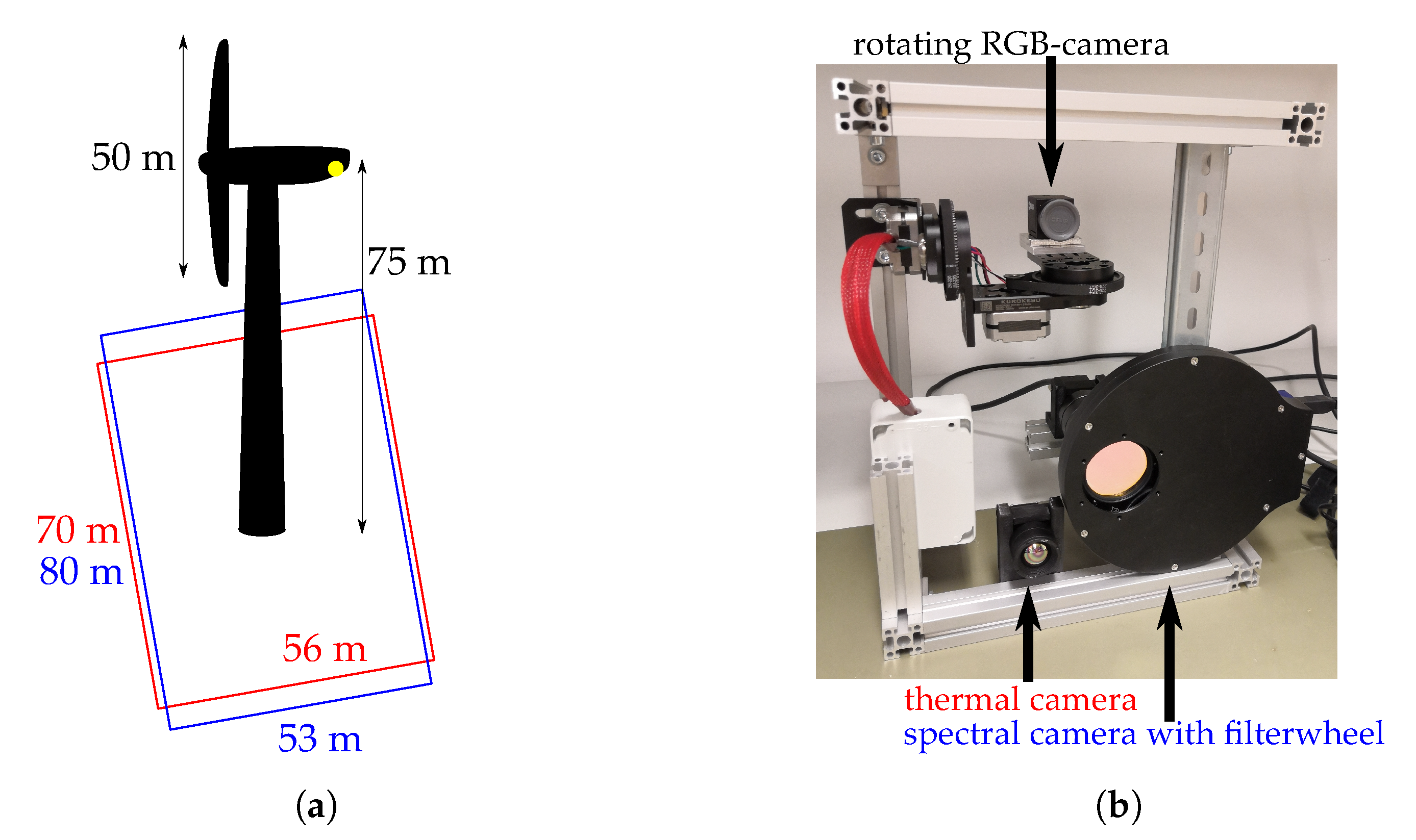
Figure 3.
(a) dimensions of wind turbine; FOV (= field of view) thermal camera (red); FOV spectral camera (blue). (b) Prototype of camera system for collision victim detection.
Figure 3.
(a) dimensions of wind turbine; FOV (= field of view) thermal camera (red); FOV spectral camera (blue). (b) Prototype of camera system for collision victim detection.
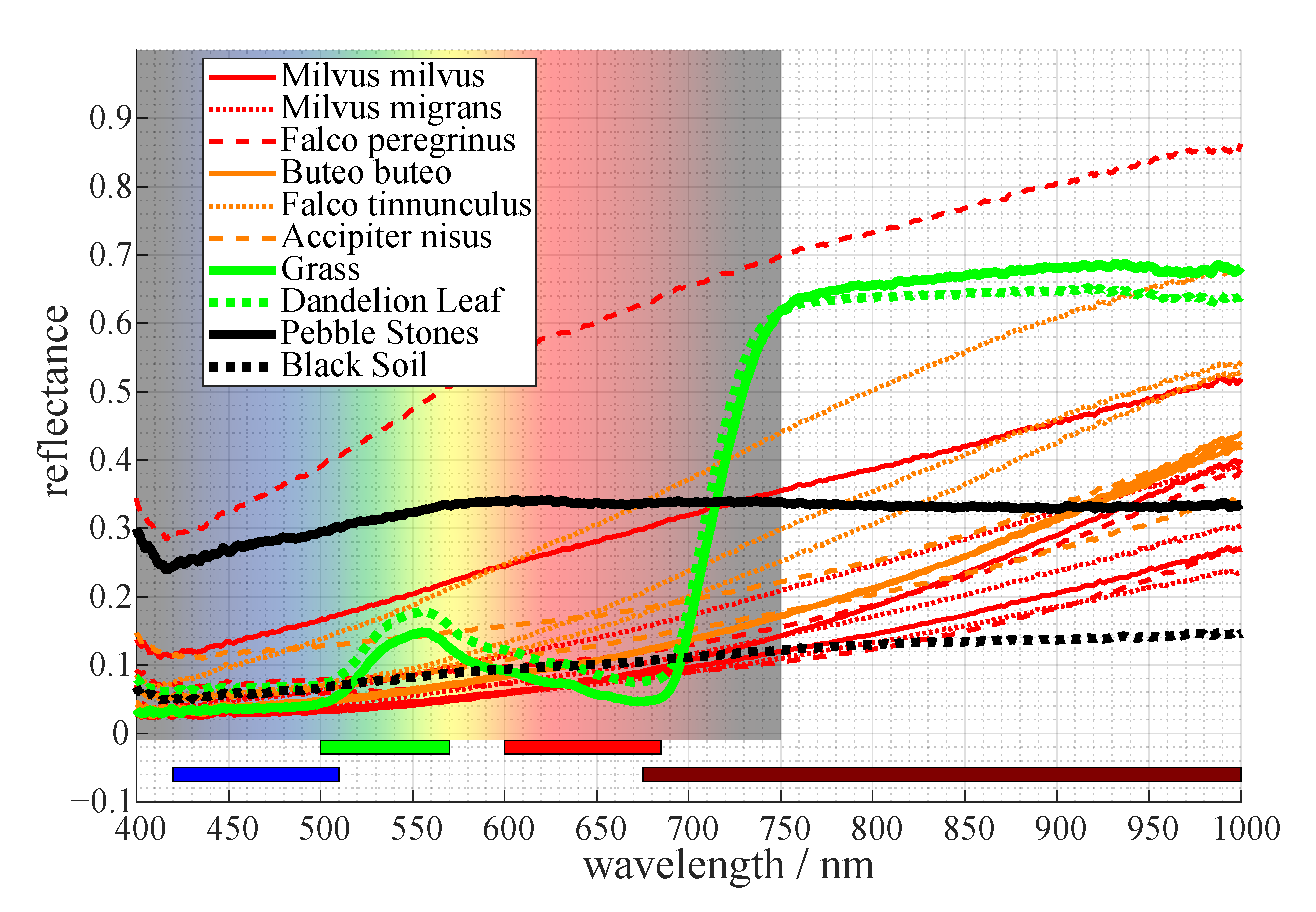
Figure 4.
Reflectance of endangered bird species, vegetation, and other possible background surfaces.
Figure 4.
Reflectance of endangered bird species, vegetation, and other possible background surfaces.
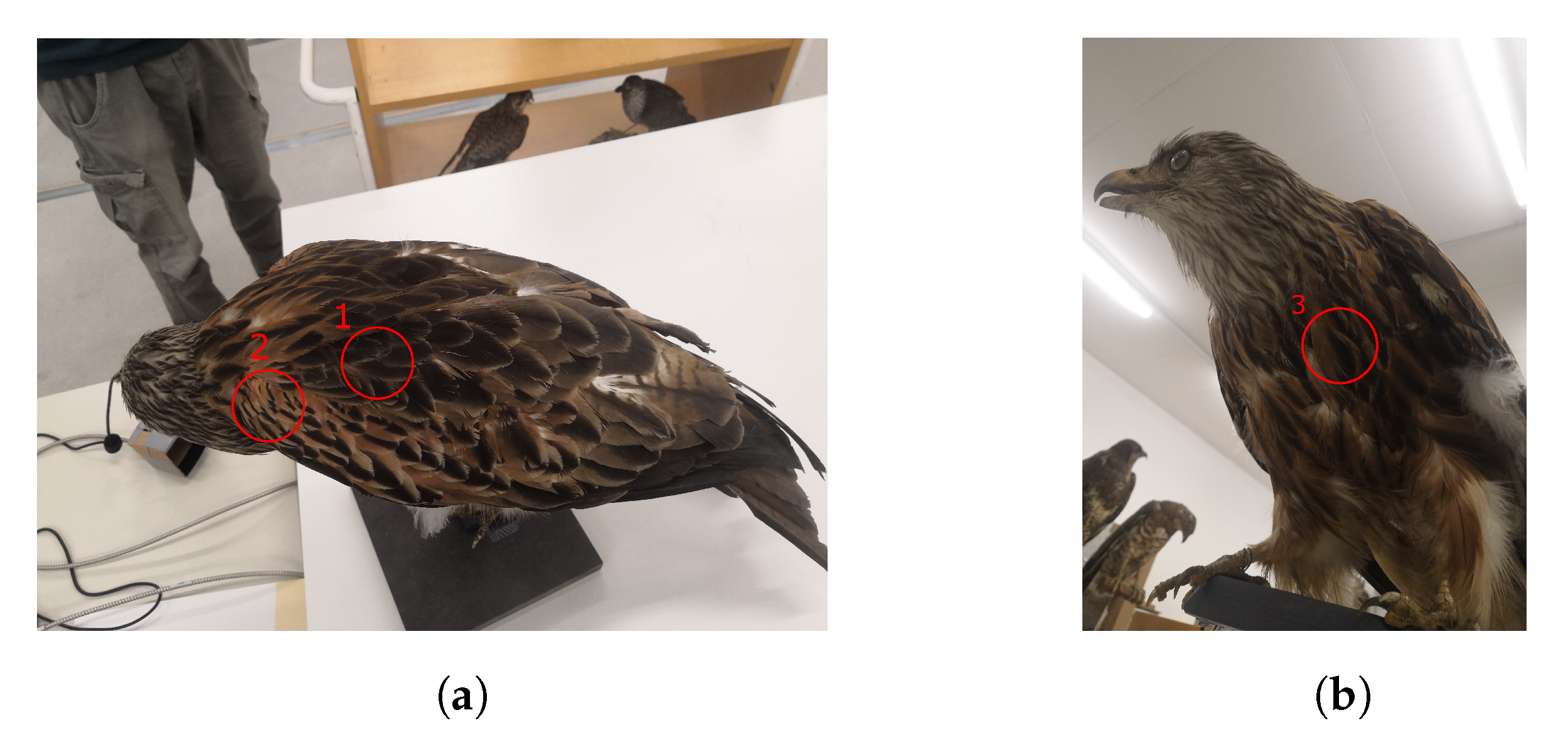
Figure 5.
Measurement positions on the back (a) and on the front side (b) of a Milvus milvus (red kite).
Figure 5.
Measurement positions on the back (a) and on the front side (b) of a Milvus milvus (red kite).
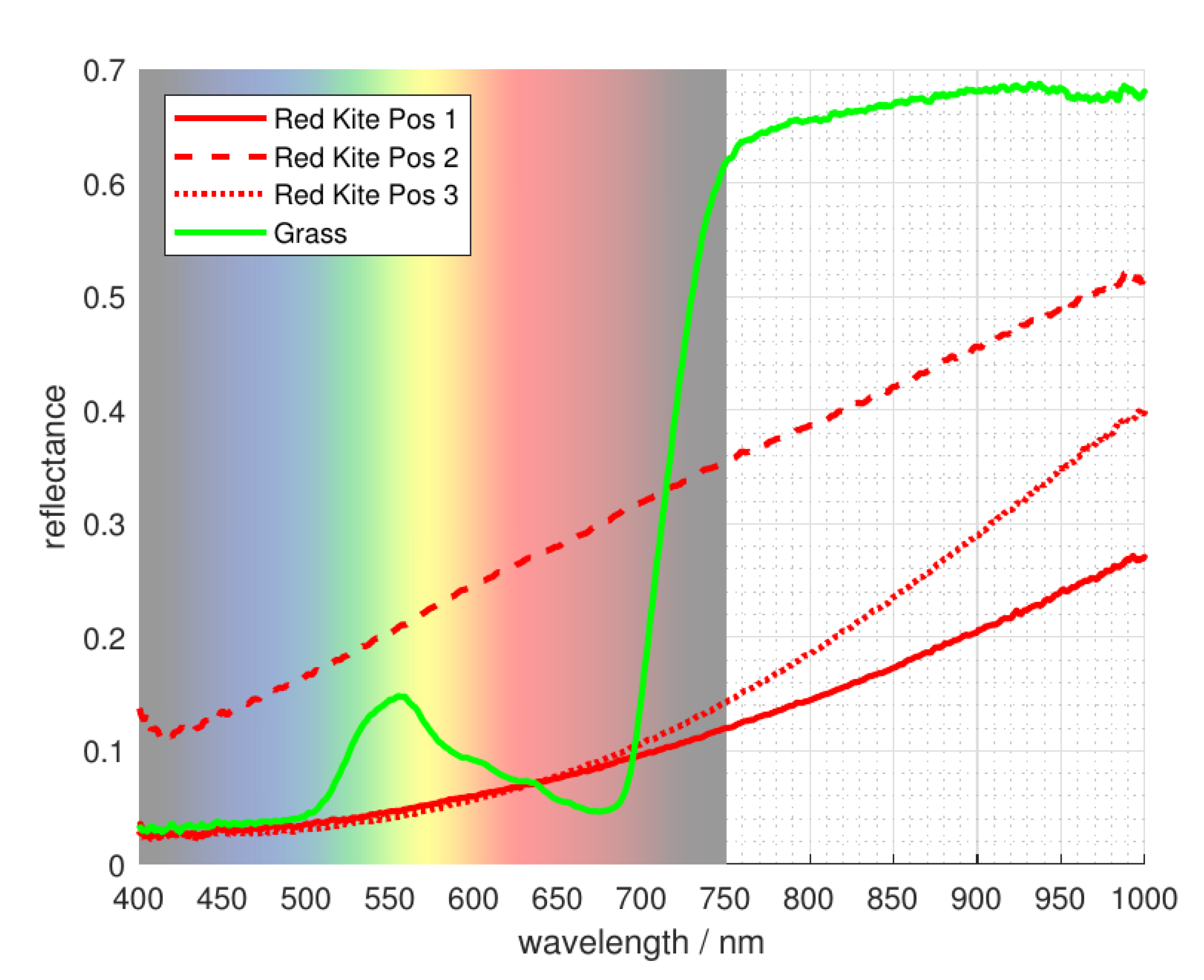
Figure 6.
Reflectance measurement result of Milvus milvus (
Figure 5) compared to that of grass.
Figure 6.
Reflectance measurement result of Milvus milvus (
Figure 5) compared to that of grass.
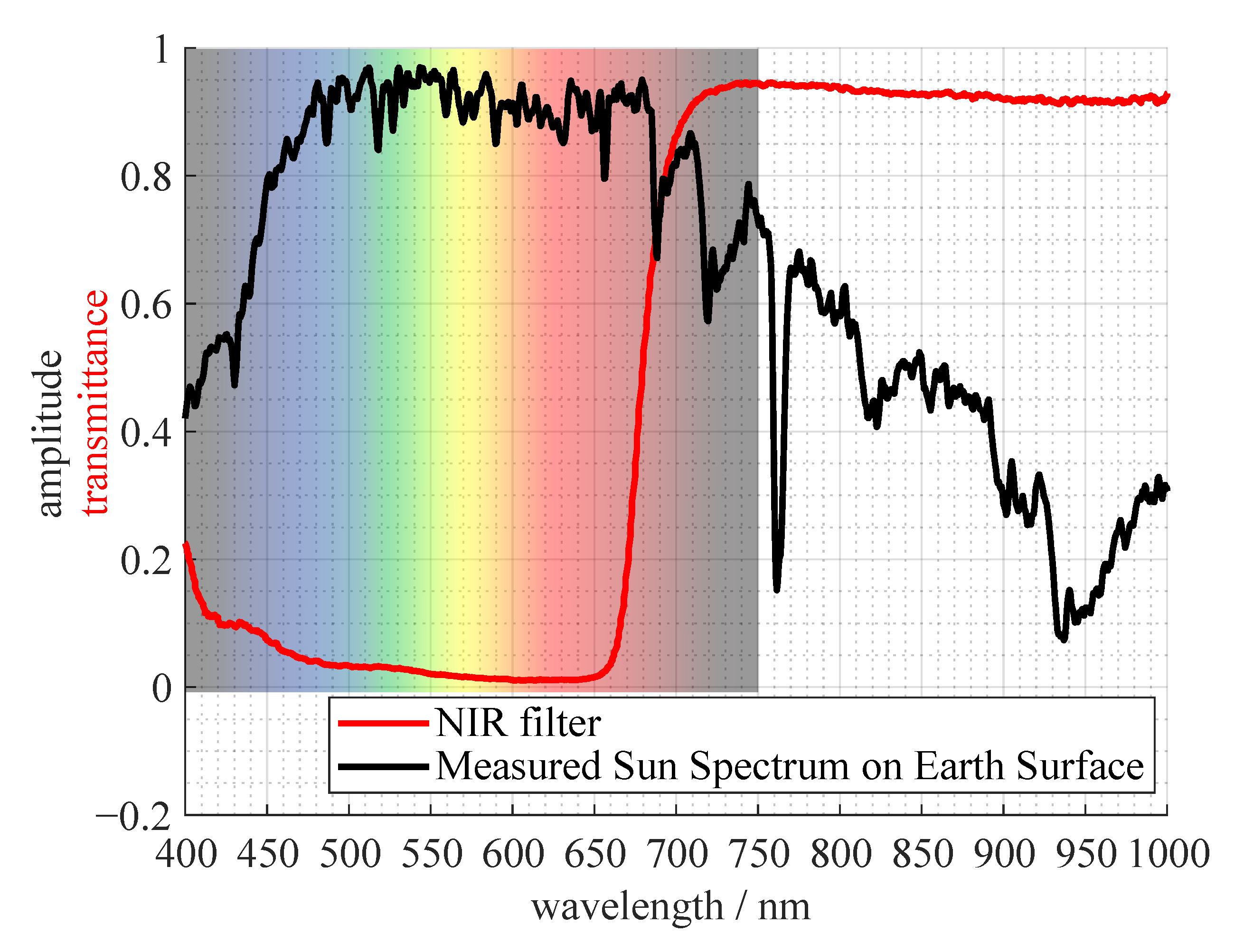
Figure 7.
Shape of sun spectrum (normed to maximum of amplitude) measured on earth’s surface; measured transmittance of used NIR filter.
Figure 7.
Shape of sun spectrum (normed to maximum of amplitude) measured on earth’s surface; measured transmittance of used NIR filter.
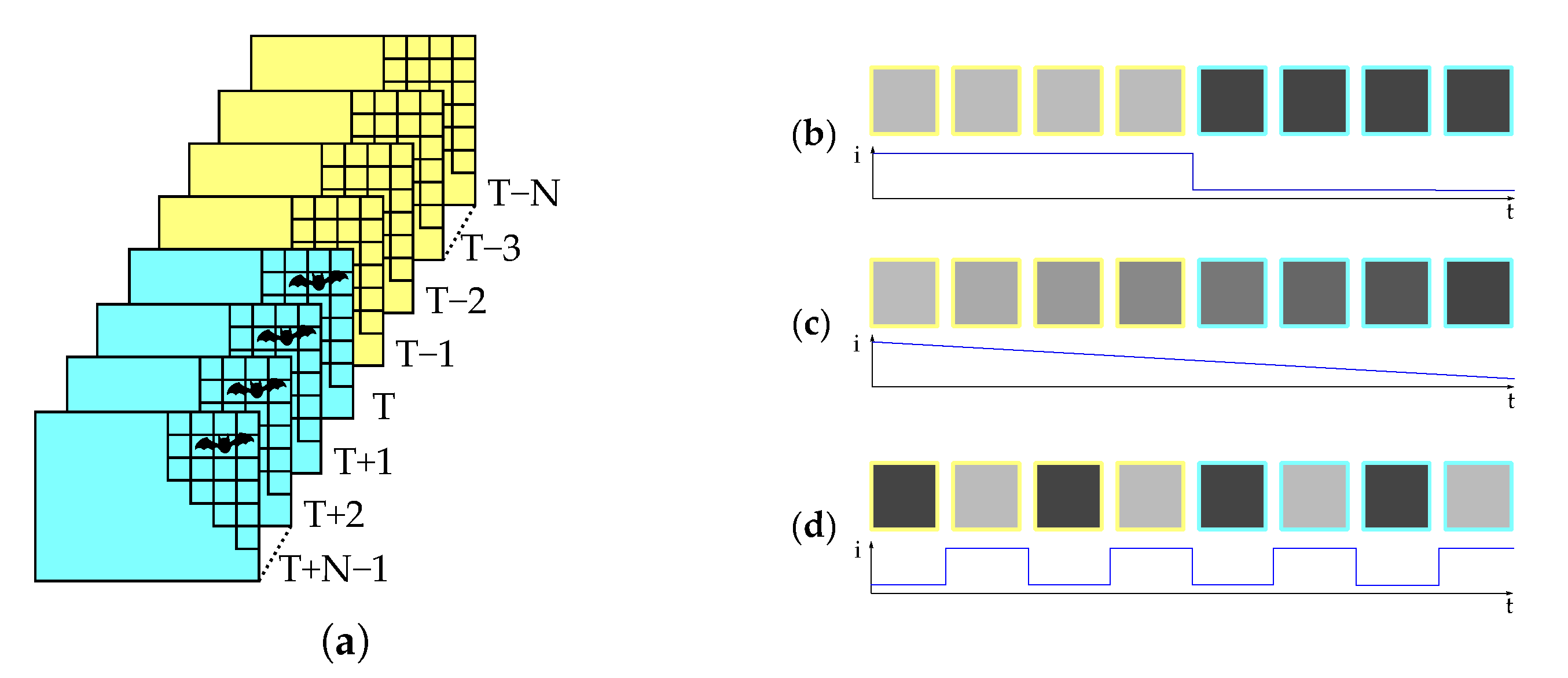
Figure 8.
(a) Picture stack with new (cyan) and old (yellow) images, (b) gray values over time for a potential strike victim, (c) change in brightness over time, (d) alternating gray values, e.g., moving grass.
Figure 8.
(a) Picture stack with new (cyan) and old (yellow) images, (b) gray values over time for a potential strike victim, (c) change in brightness over time, (d) alternating gray values, e.g., moving grass.
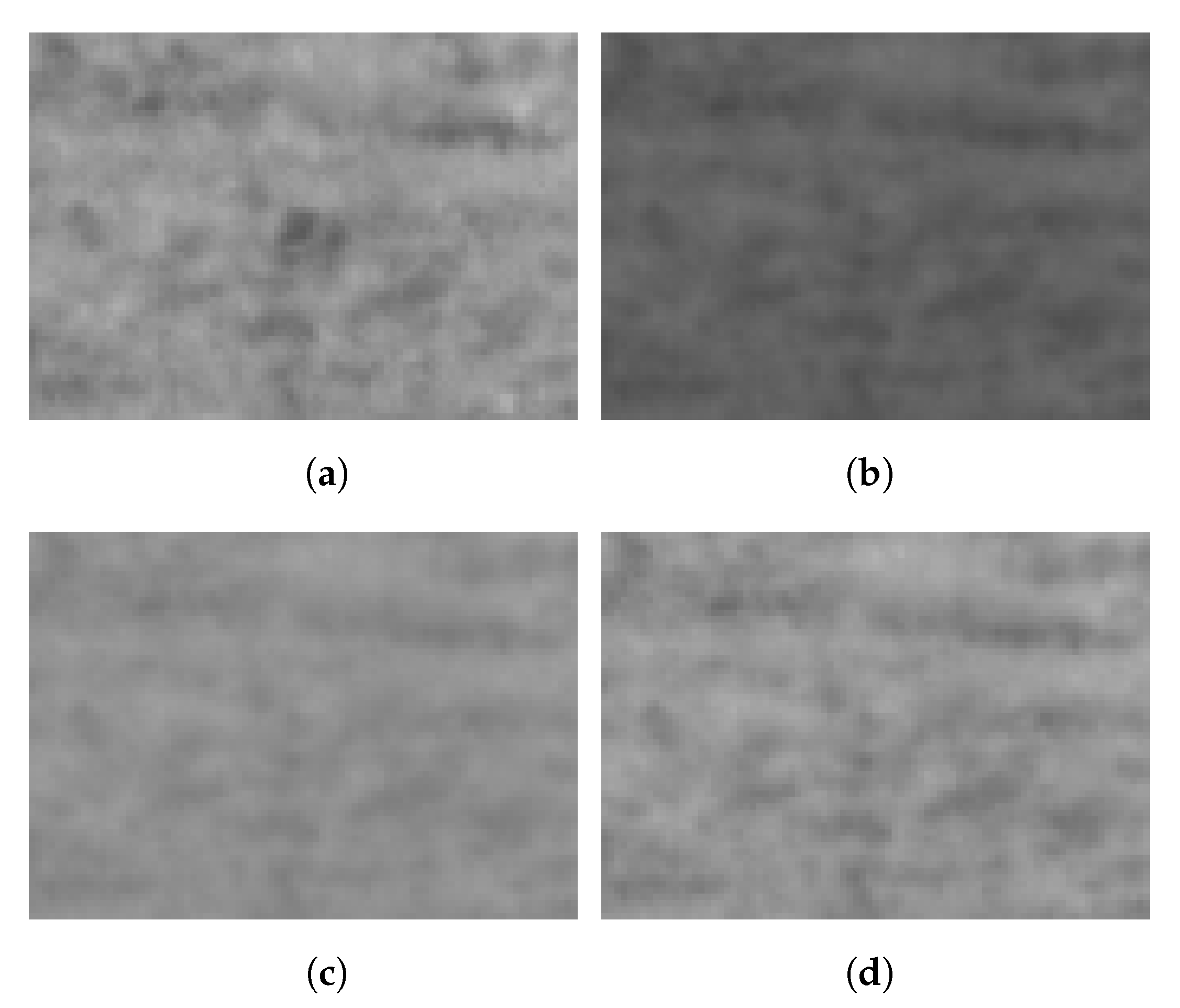
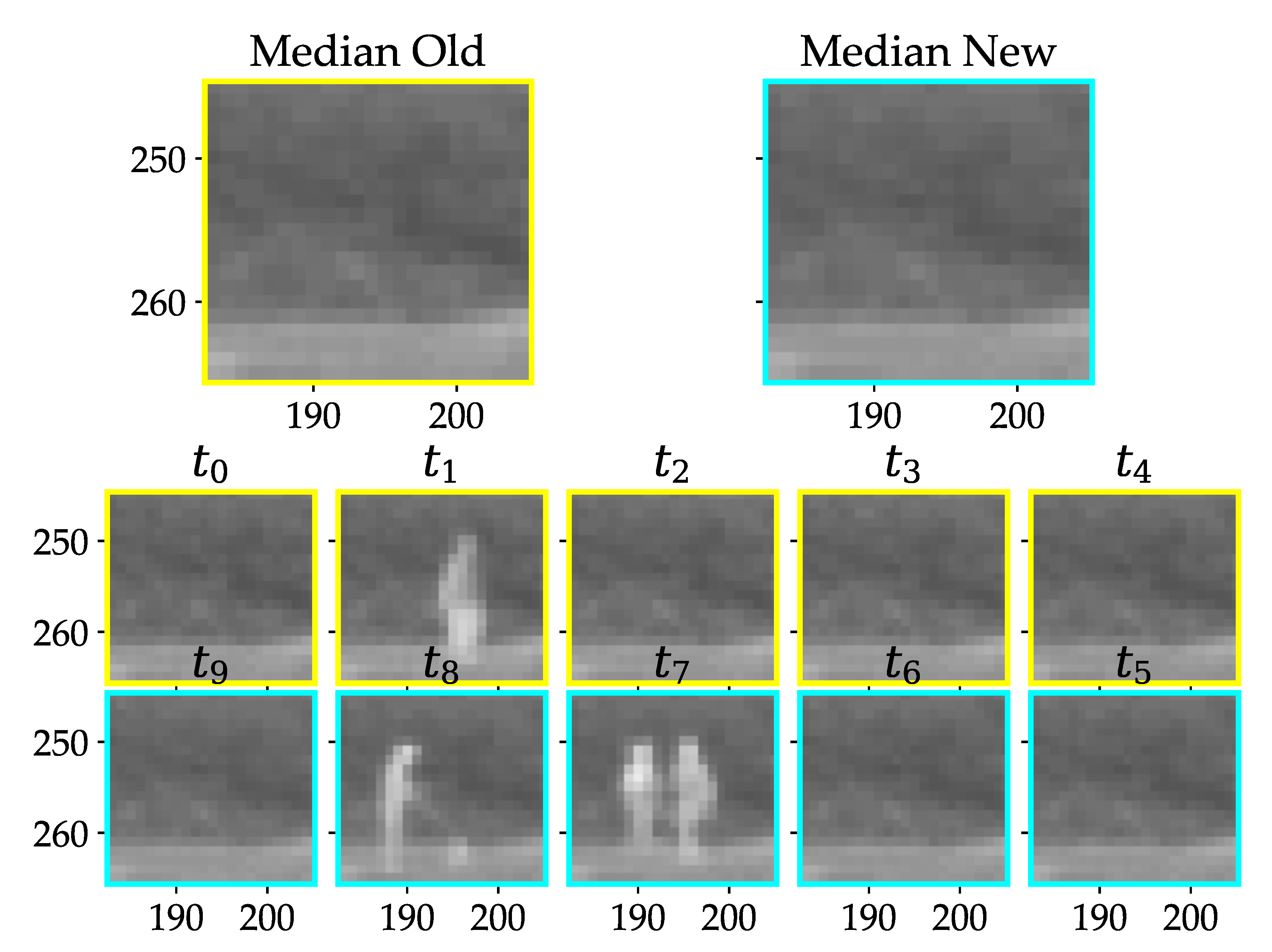
Figure 9.
All images show same zoomed part of the scene. In middle of (a) phantom can be seen (middle) laying in the grass. One minute earlier (b) was taken; object was not there and sun was hidden by clouds. (c) is same image as (b) but with median adjusted to (a). (d) is same as (b) after histogram matching with respect to (a).
Figure 9.
All images show same zoomed part of the scene. In middle of (a) phantom can be seen (middle) laying in the grass. One minute earlier (b) was taken; object was not there and sun was hidden by clouds. (c) is same image as (b) but with median adjusted to (a). (d) is same as (b) after histogram matching with respect to (a).
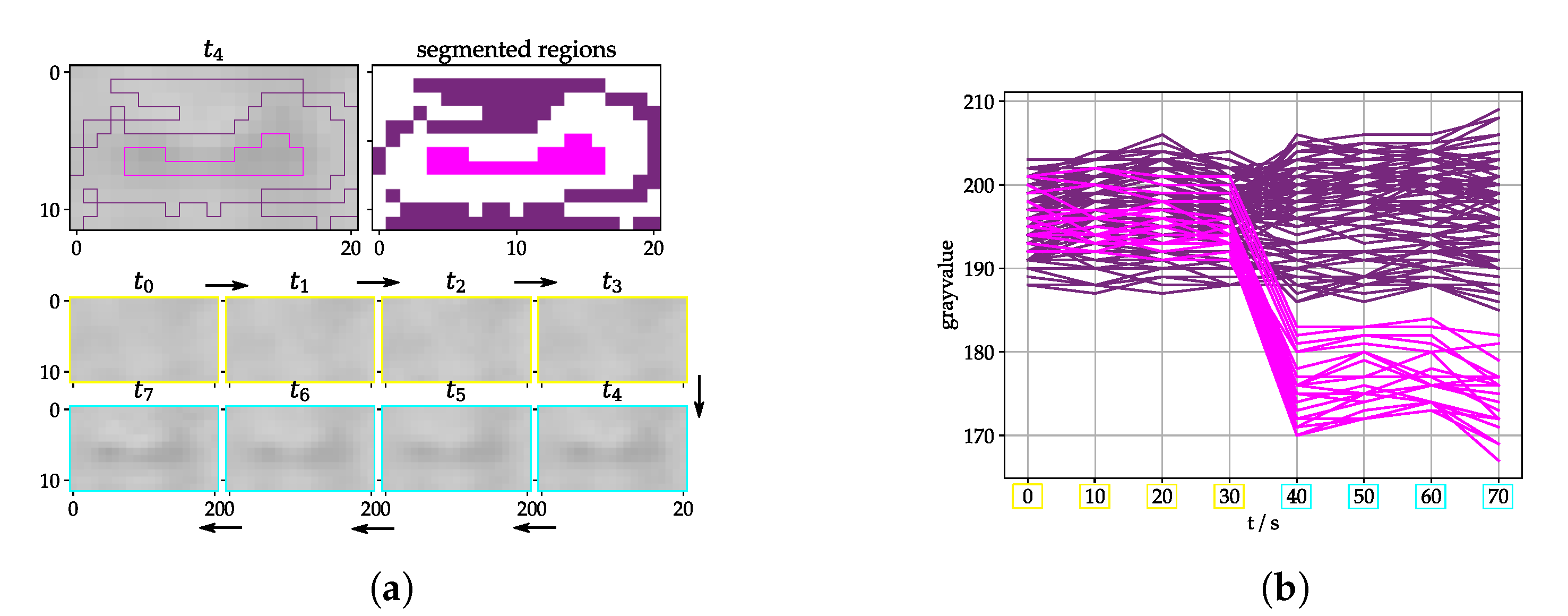
Figure 10.
(
a) Tool for manual segmentation of inner (pink) and outer (purple) region for analysis.
to
(newest image) shows image stack according to
Figure 8; images are zoomed to relevant part and are with VIS camera (
b) gray values over time of segmented regions starting from
with
.
Figure 10.
(
a) Tool for manual segmentation of inner (pink) and outer (purple) region for analysis.
to
(newest image) shows image stack according to
Figure 8; images are zoomed to relevant part and are with VIS camera (
b) gray values over time of segmented regions starting from
with
.
Figure 11.
(a) Fatality score (red) and ground truth; (b) resulting region after thresholding and morphological operations.
Figure 11.
(a) Fatality score (red) and ground truth; (b) resulting region after thresholding and morphological operations.
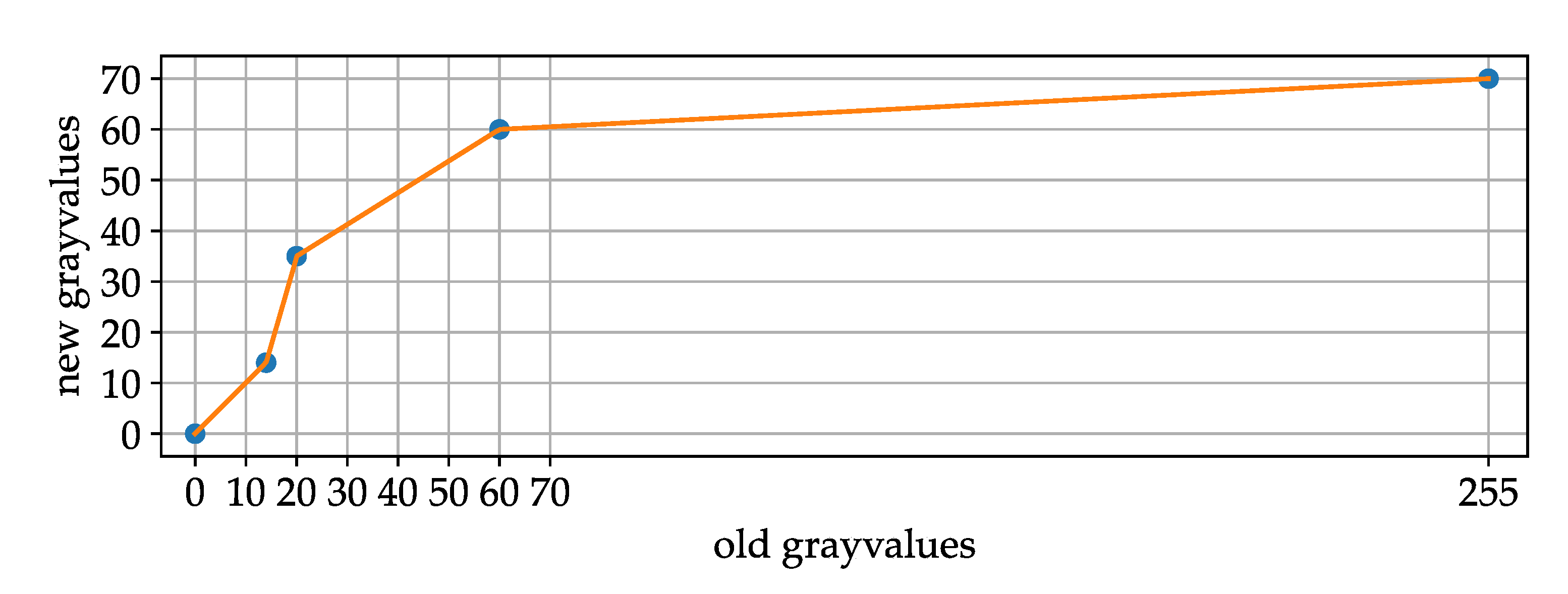
Figure 12.
LUT for LUTshift function in Equation (
1).
Figure 12.
LUT for LUTshift function in Equation (
1).
Figure 13.
Moving people recorded with the LWIR camera; the median helps to get rid of outliers.
Figure 13.
Moving people recorded with the LWIR camera; the median helps to get rid of outliers.
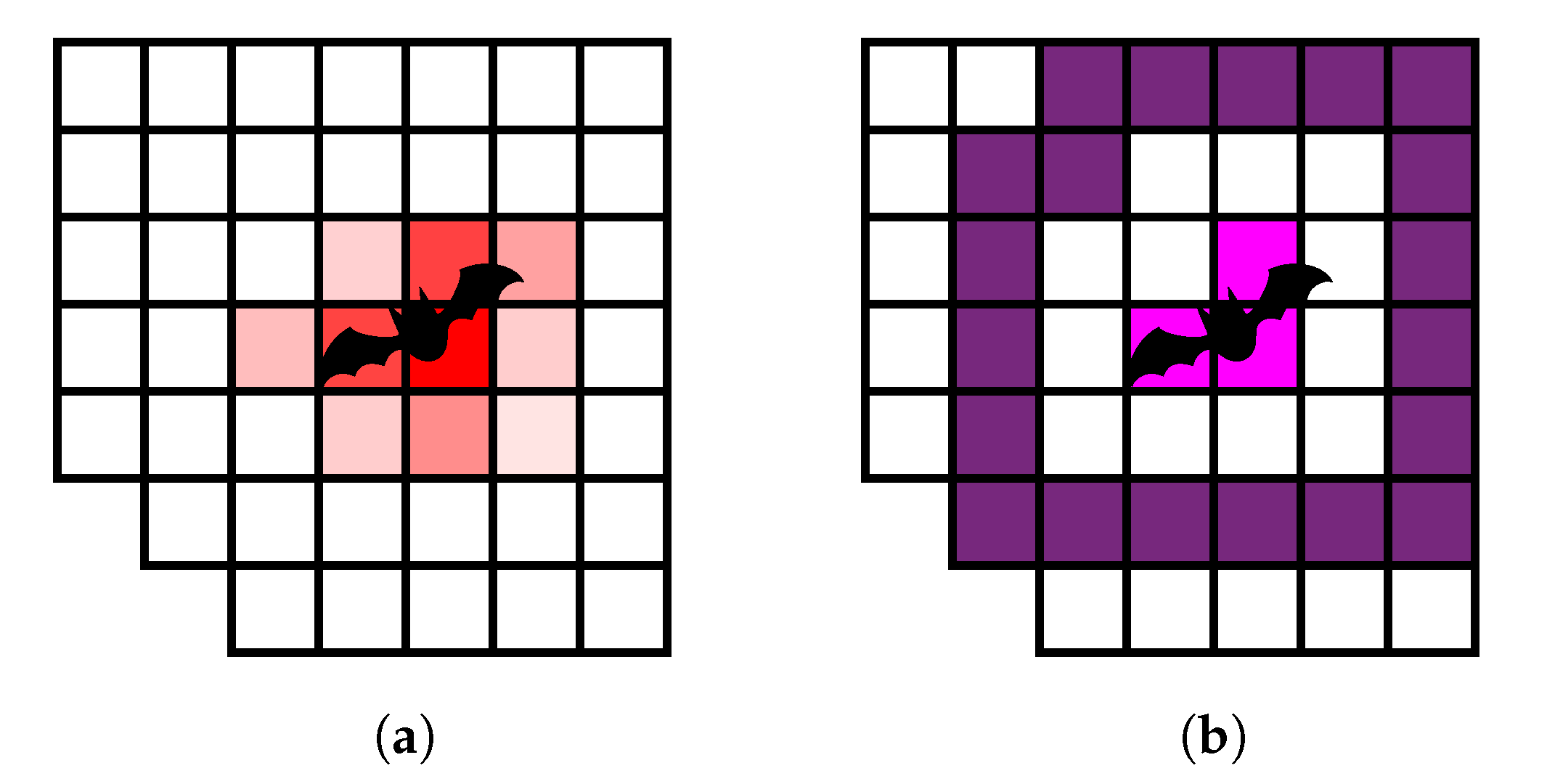
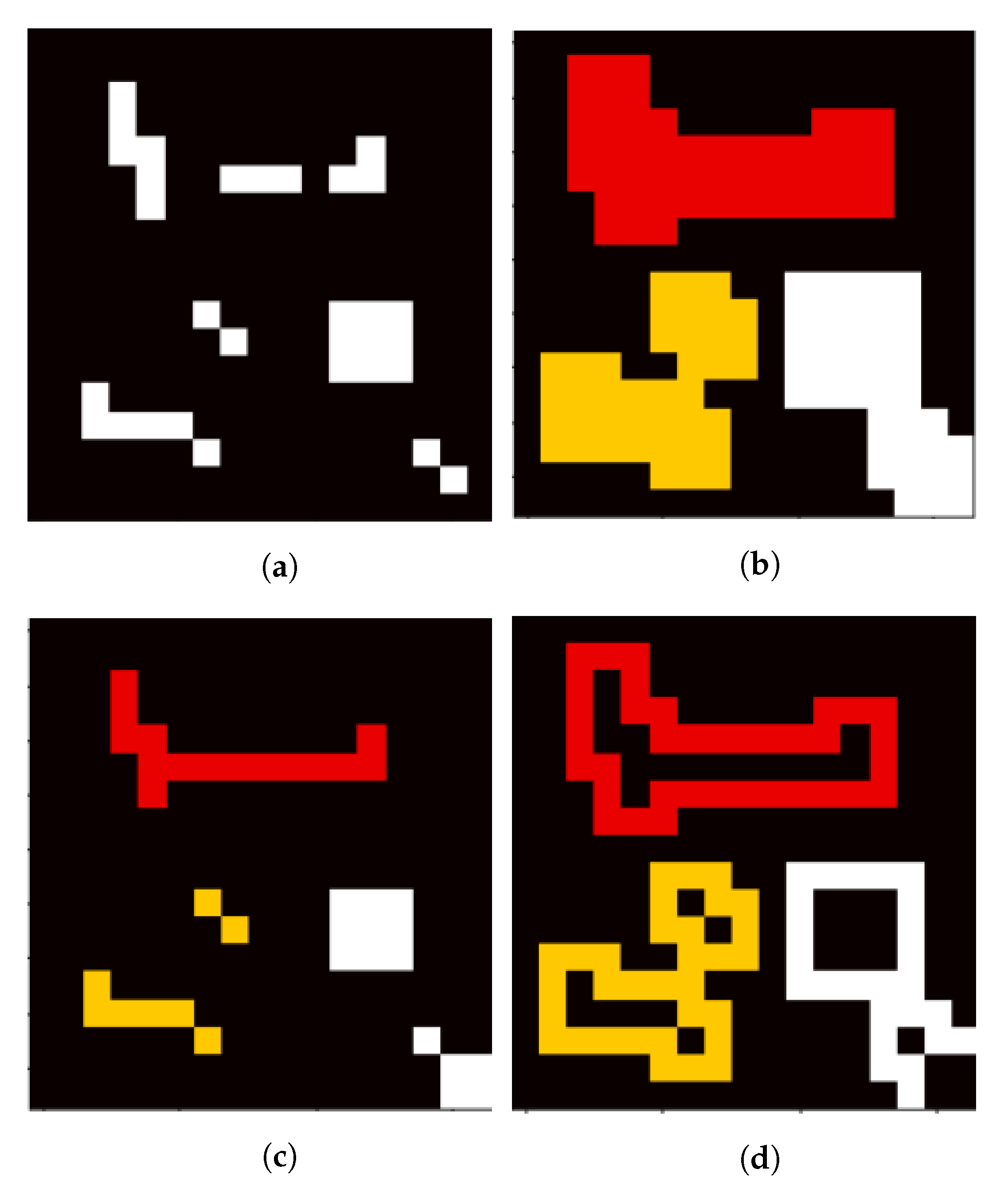
Figure 14.
Region Generation: (a) thresholded image, (b) labeled full, (c) labeled inner and (d) labeled outer areas.
Figure 14.
Region Generation: (a) thresholded image, (b) labeled full, (c) labeled inner and (d) labeled outer areas.
Figure 15.
Criteria for the decision about a detection.
Figure 15.
Criteria for the decision about a detection.
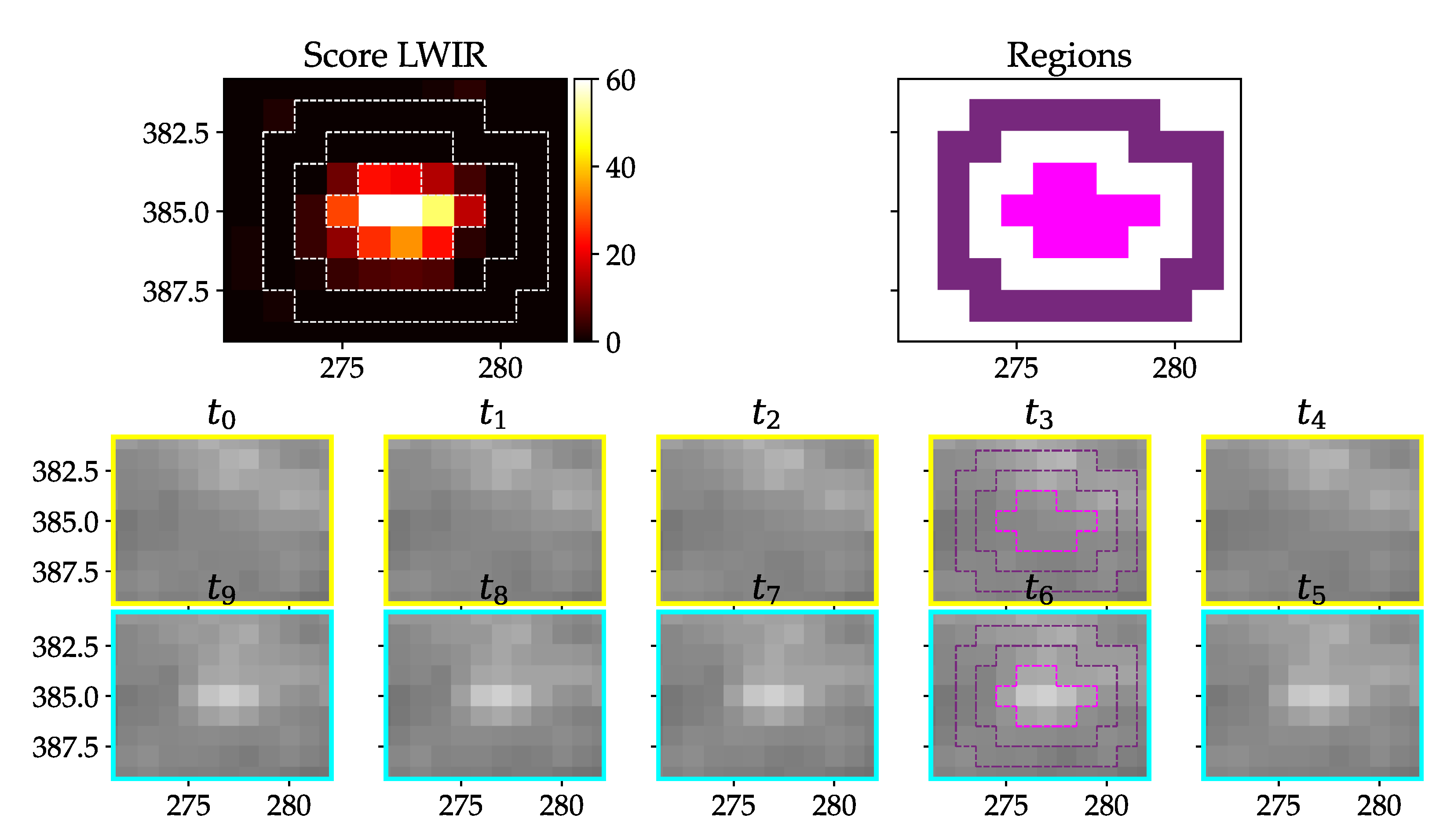
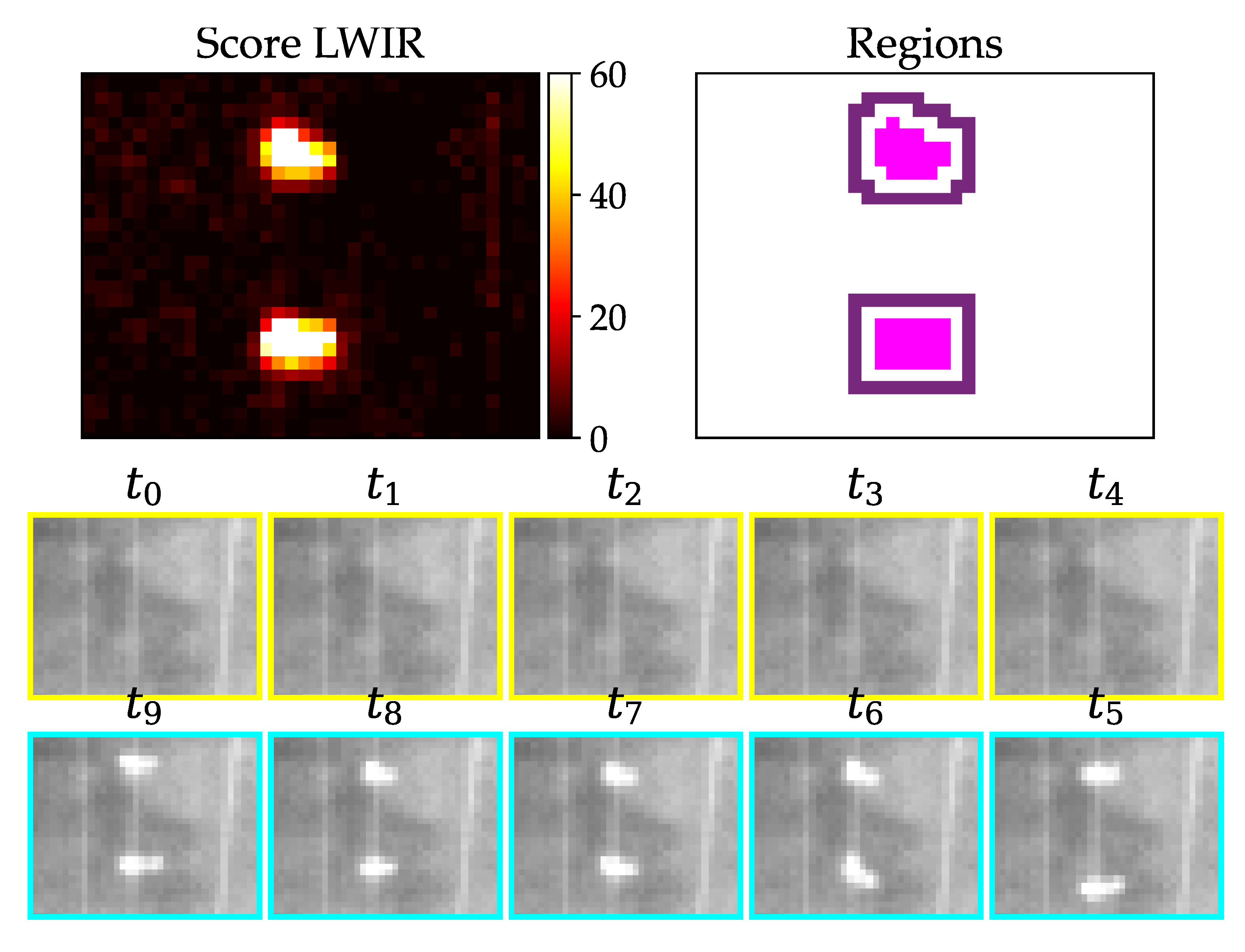
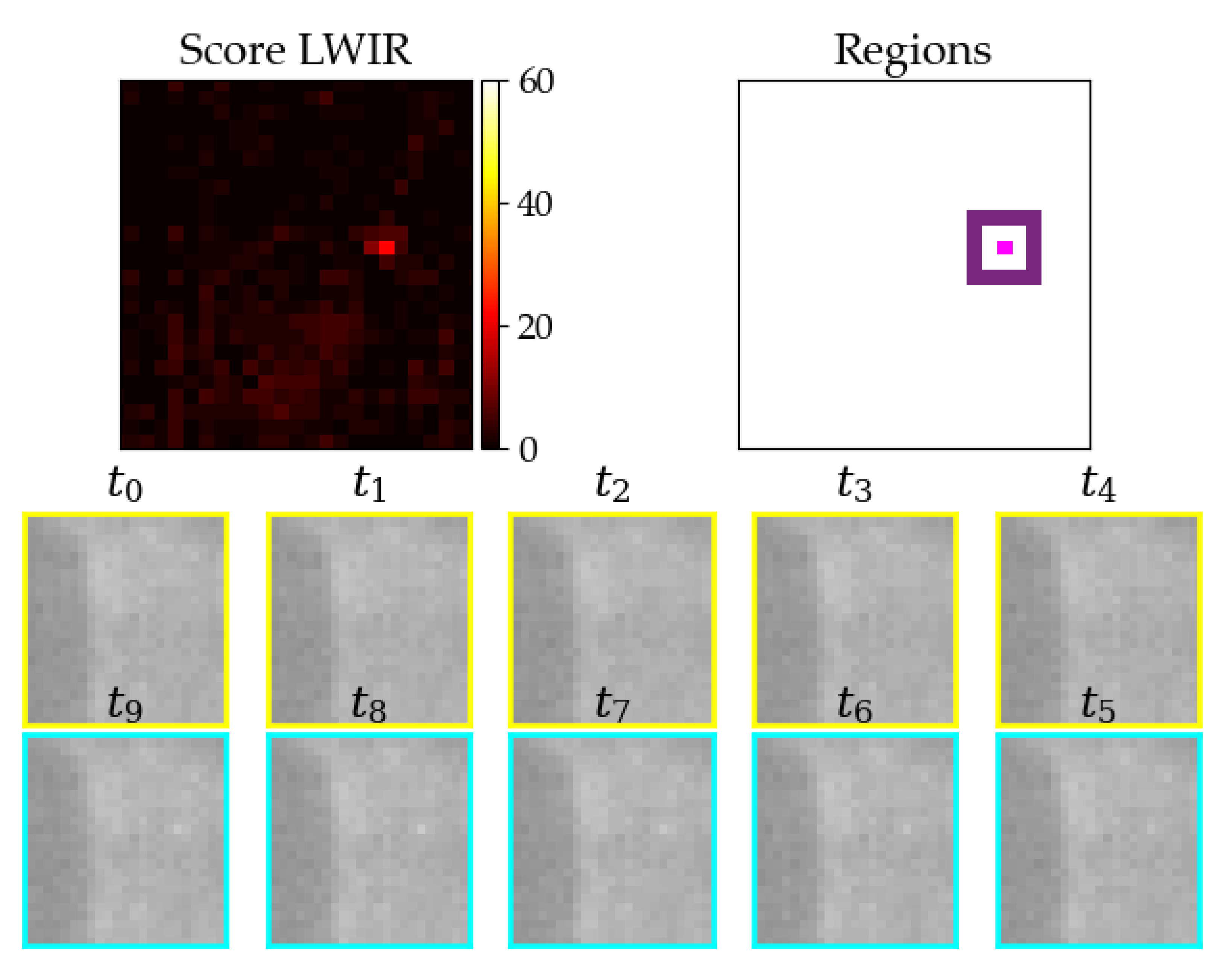
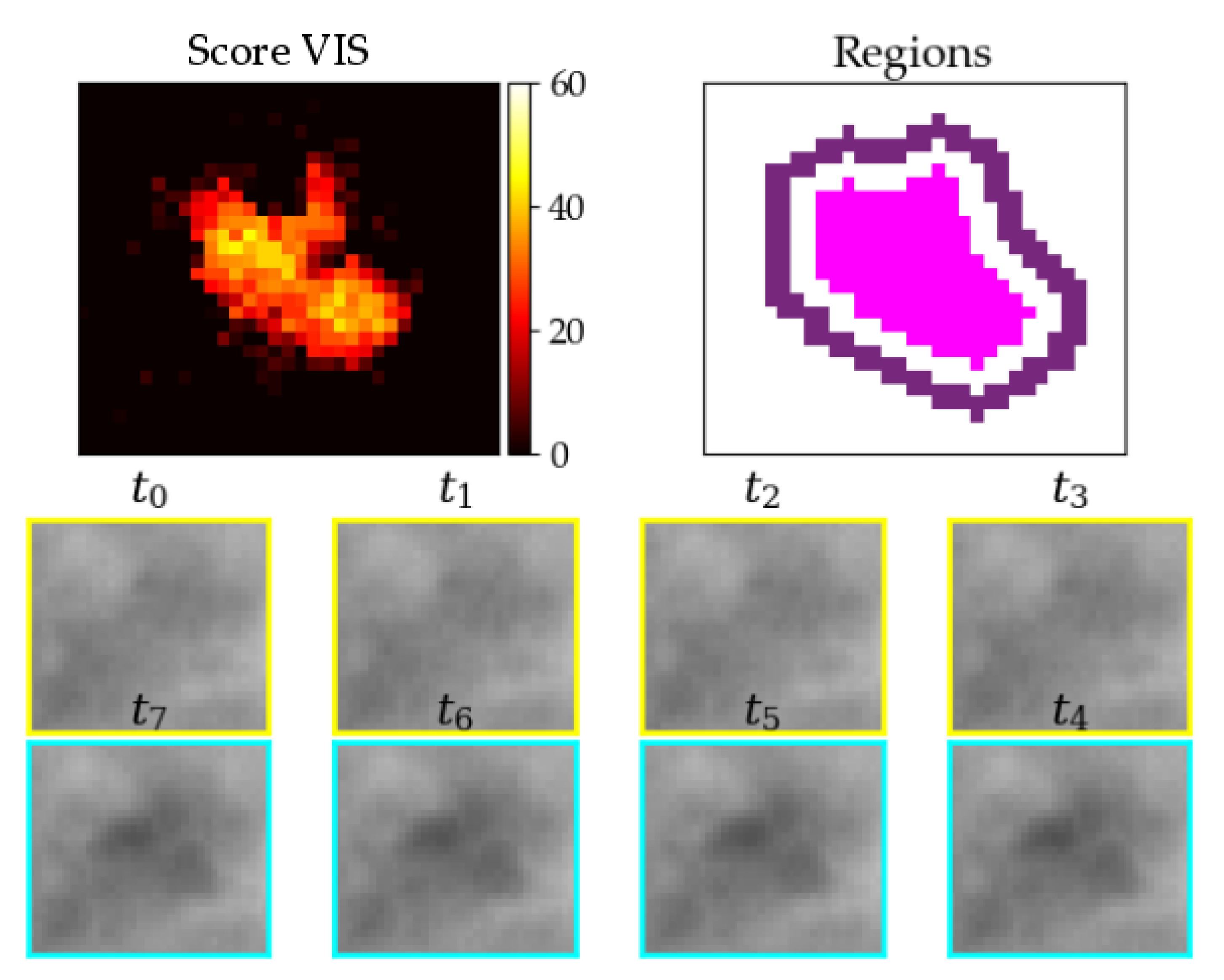
Figure 16.
Warm test object (body temperature) with about 5 cm lengths lying in grass; upper left: resulting score from pixel-wise detection; upper right: derived inner (pink) and outer (purple) region; two lower rows: image stack from oldest () to newest () image with assumed strike happening between and .
Figure 16.
Warm test object (body temperature) with about 5 cm lengths lying in grass; upper left: resulting score from pixel-wise detection; upper right: derived inner (pink) and outer (purple) region; two lower rows: image stack from oldest () to newest () image with assumed strike happening between and .
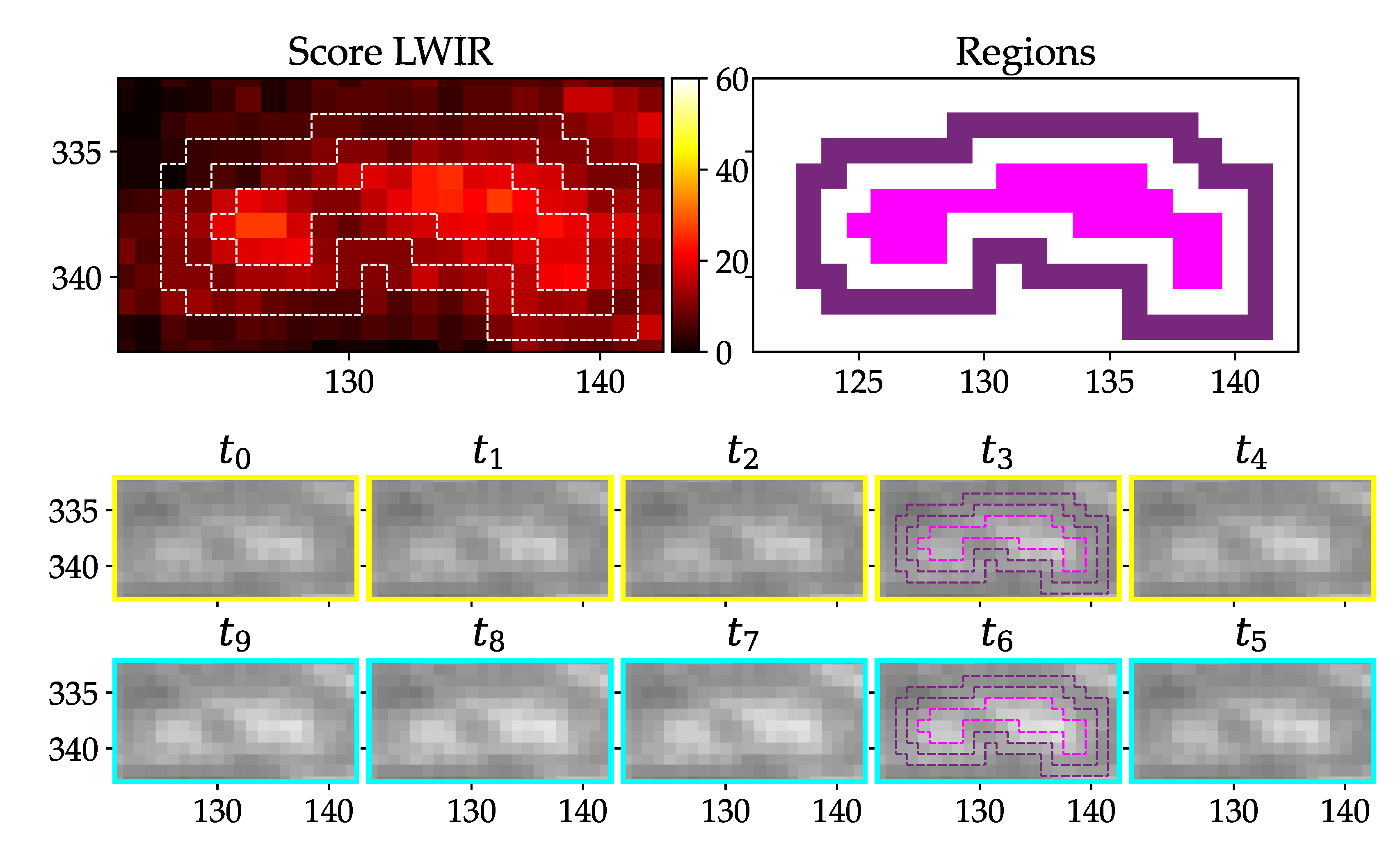
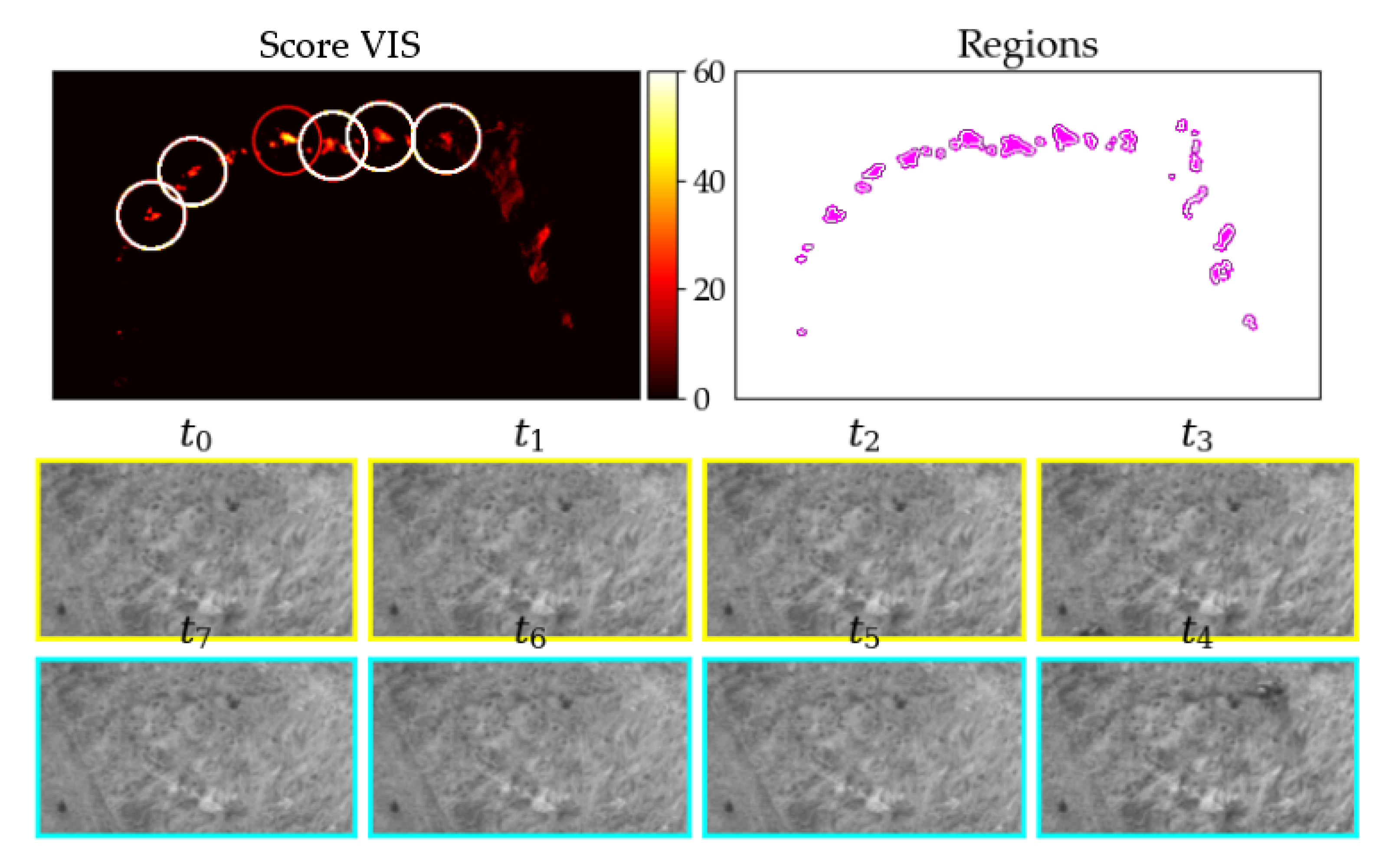
Figure 17.
Wind leads to a high LWIR score distributed over a big area compared to a potential detection.
Figure 17.
Wind leads to a high LWIR score distributed over a big area compared to a potential detection.
Figure 18.
Grass getting illuminated by sun differently over time, which leads to a false positive detection after preselection, but obviously image content stays same from to .
Figure 18.
Grass getting illuminated by sun differently over time, which leads to a false positive detection after preselection, but obviously image content stays same from to .
Figure 19.
Birds sitting on a guy wire produce false positives without further filtering.
Figure 19.
Birds sitting on a guy wire produce false positives without further filtering.
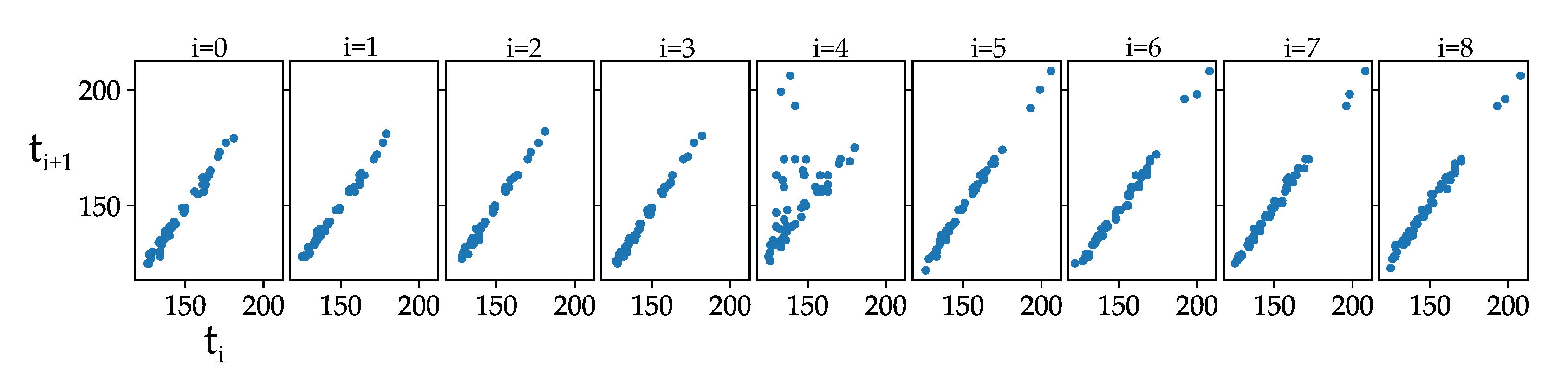
Figure 20.
Gray value vector of region at time
on x-axis plotted against vector of the same region at time
on y-axis of true positive detection (
Figure 16).
Figure 20.
Gray value vector of region at time
on x-axis plotted against vector of the same region at time
on y-axis of true positive detection (
Figure 16).
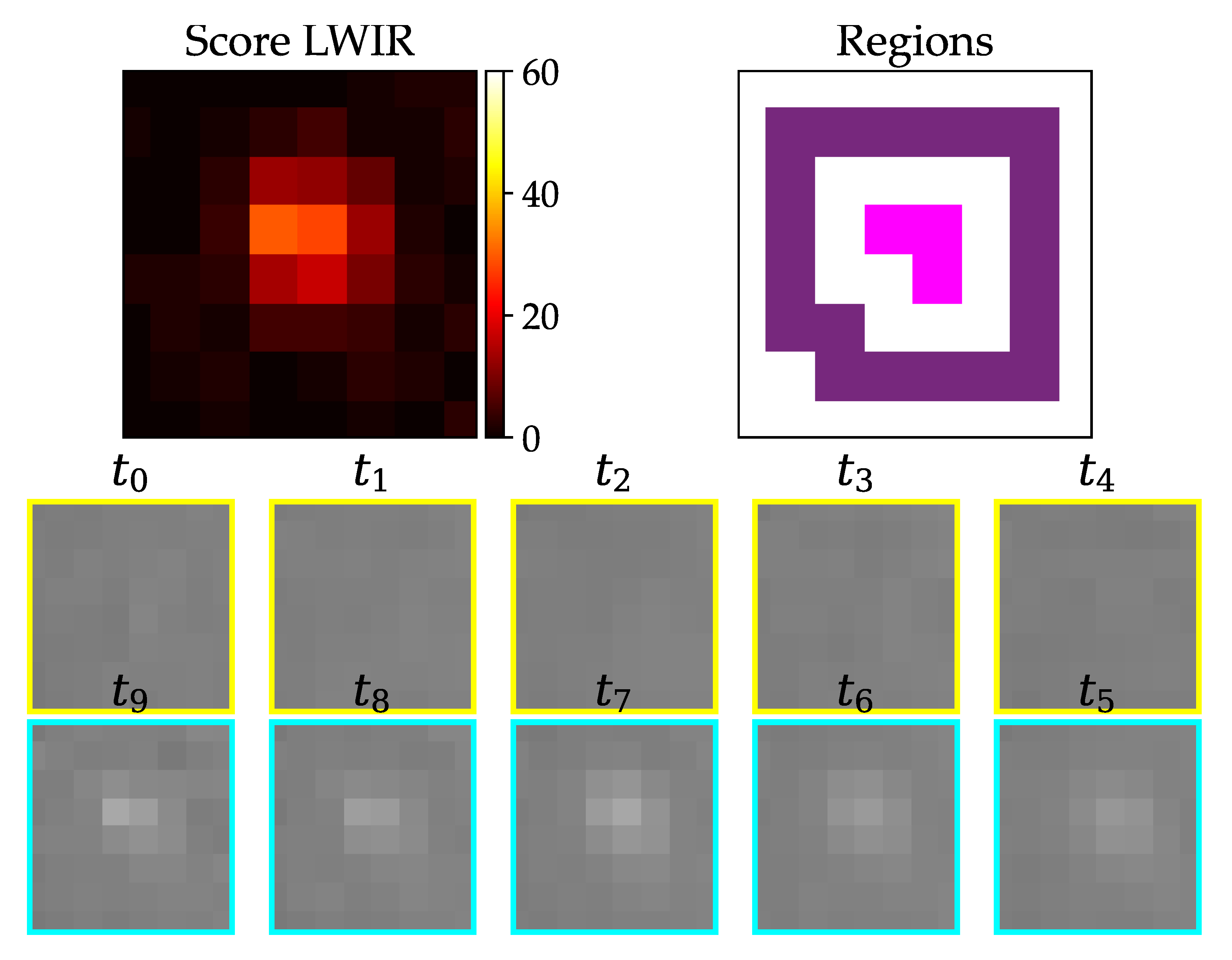
Figure 21.
Phantom with similar gray values as background.
Figure 21.
Phantom with similar gray values as background.
Figure 22.
Gray values of vector
on x-axis and vector
on y-axis for image data of
Figure 21.
Figure 22.
Gray values of vector
on x-axis and vector
on y-axis for image data of
Figure 21.
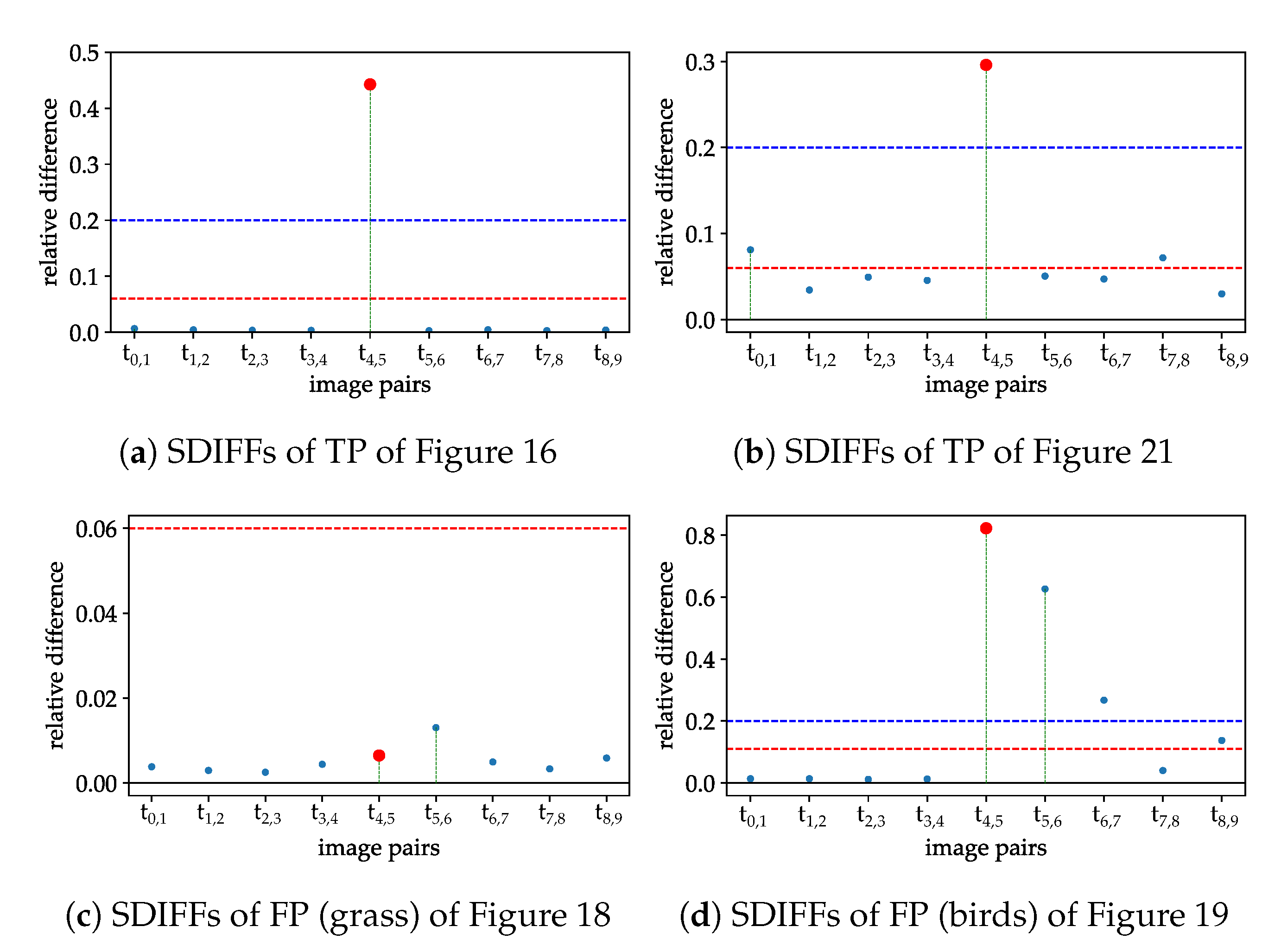
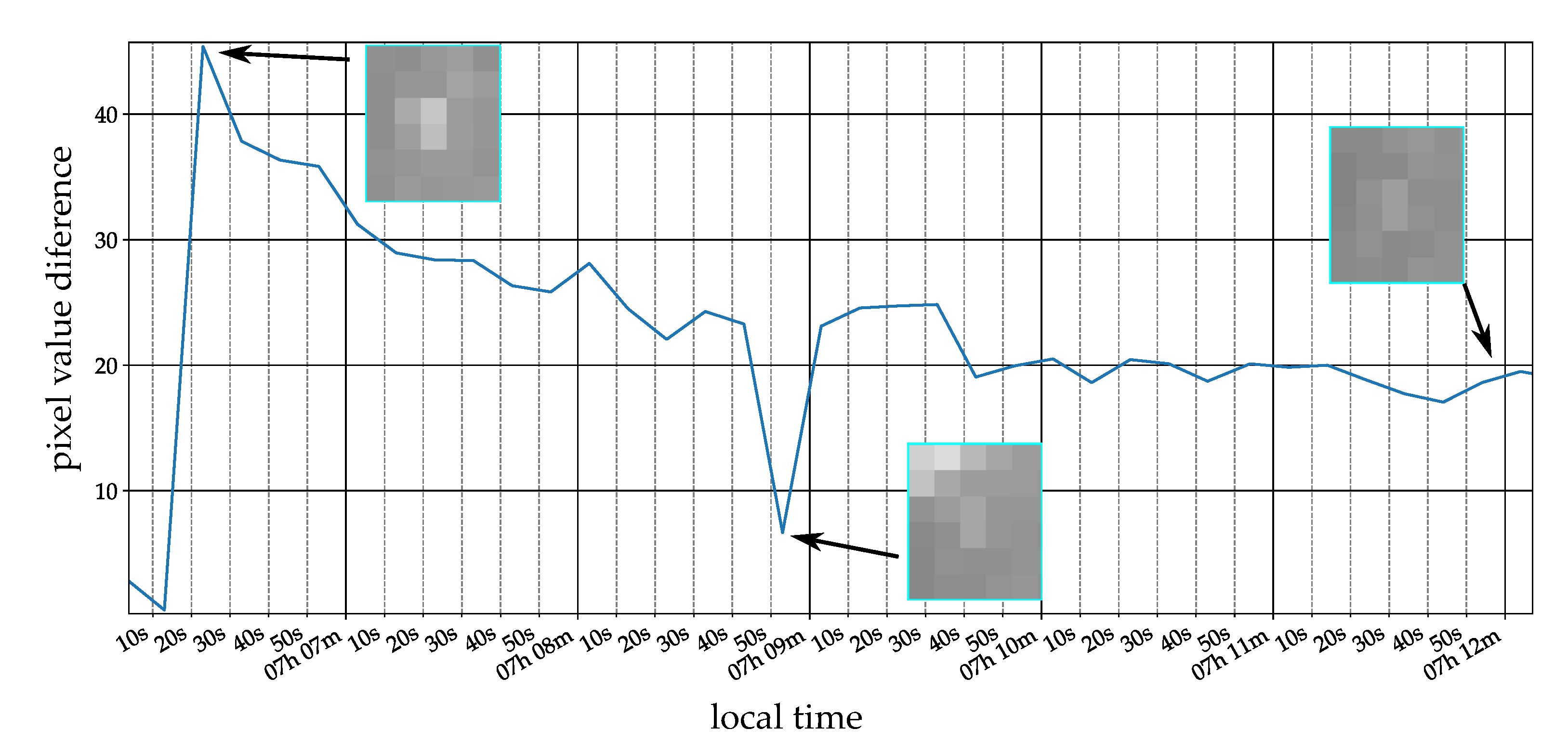
Figure 23.
SDIFFs with middle SDIFF in red and the maximum of outer SDIFFs in blue with green distance line. Horizontal lines are the thresholds according to
Table 5. (
a,
b) are true positives, (
c,
d) are false positives from preselection. (
c,
d) are correctly dismissed through SDIFF criteria in
Table 5.
Figure 23.
SDIFFs with middle SDIFF in red and the maximum of outer SDIFFs in blue with green distance line. Horizontal lines are the thresholds according to
Table 5. (
a,
b) are true positives, (
c,
d) are false positives from preselection. (
c,
d) are correctly dismissed through SDIFF criteria in
Table 5.
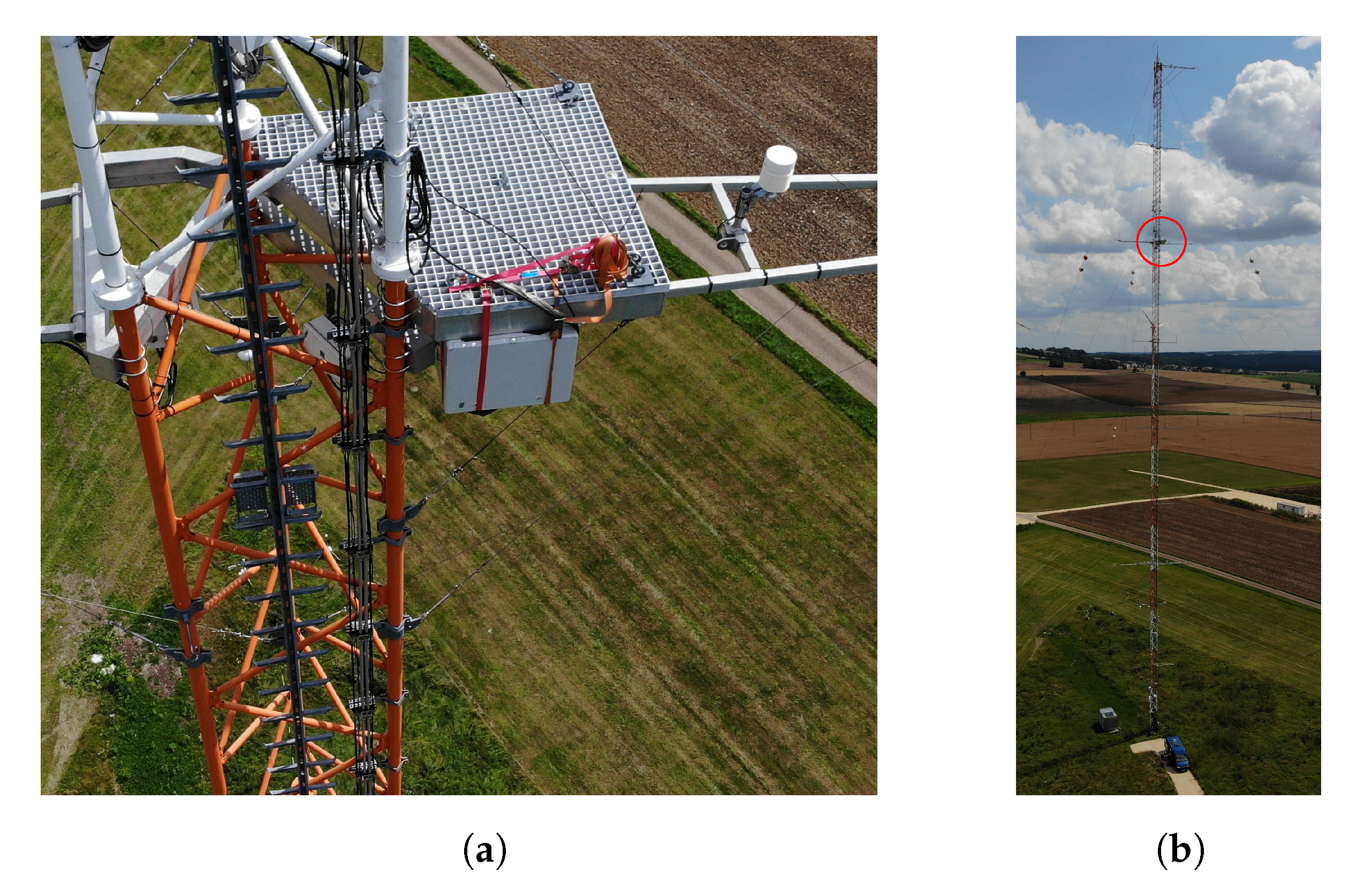
Figure 24.
The camera system in the gray box (a) was mounted in 75 m height (b).
Figure 24.
The camera system in the gray box (a) was mounted in 75 m height (b).
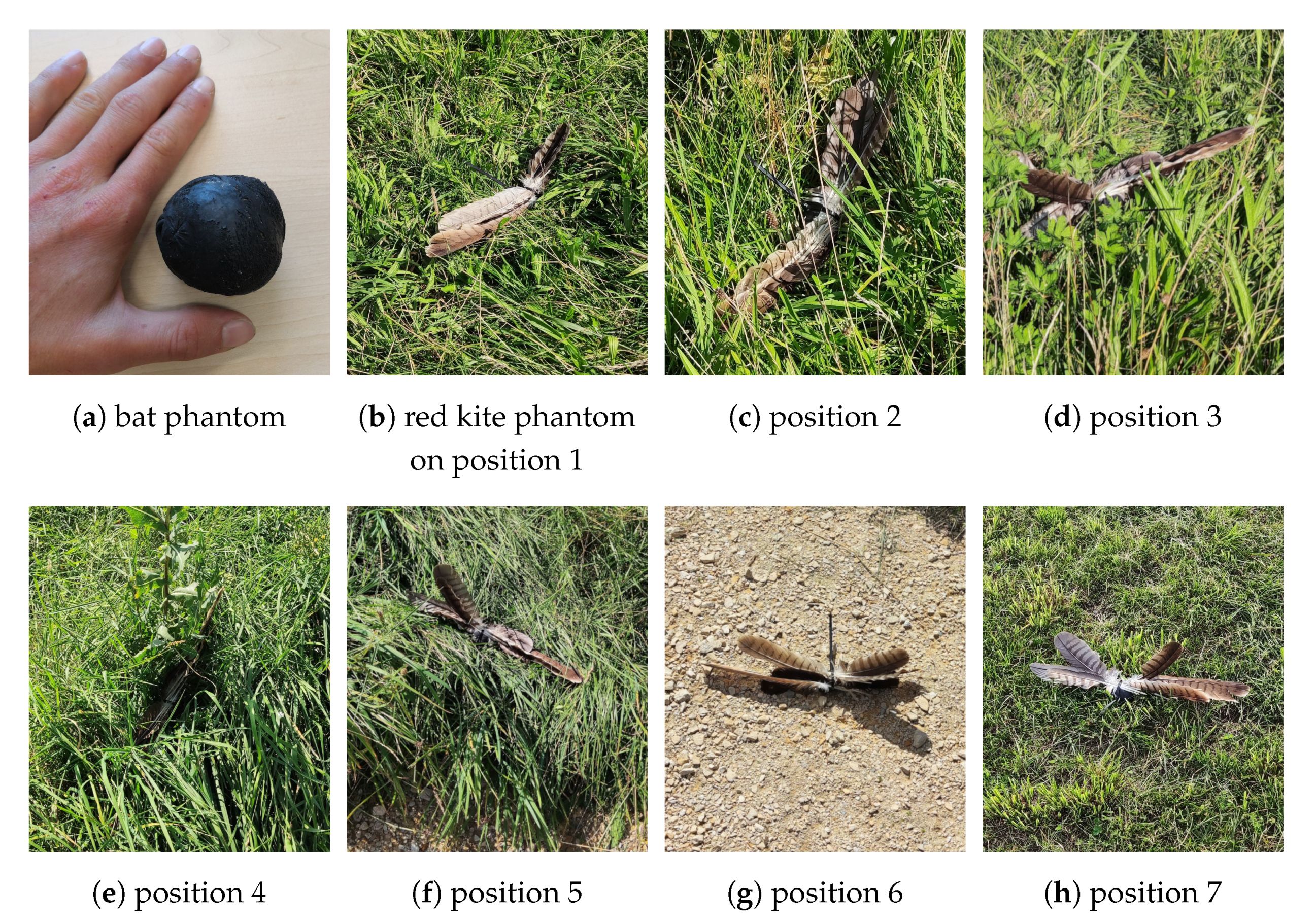
Figure 25.
The bat phantom for the LWIR camera (a) and the red kite phantom for the spectral camera (b–h) were placed on different defined positions including grass with various lengths (b–f,h) and gravel road (g).
Figure 25.
The bat phantom for the LWIR camera (a) and the red kite phantom for the spectral camera (b–h) were placed on different defined positions including grass with various lengths (b–f,h) and gravel road (g).
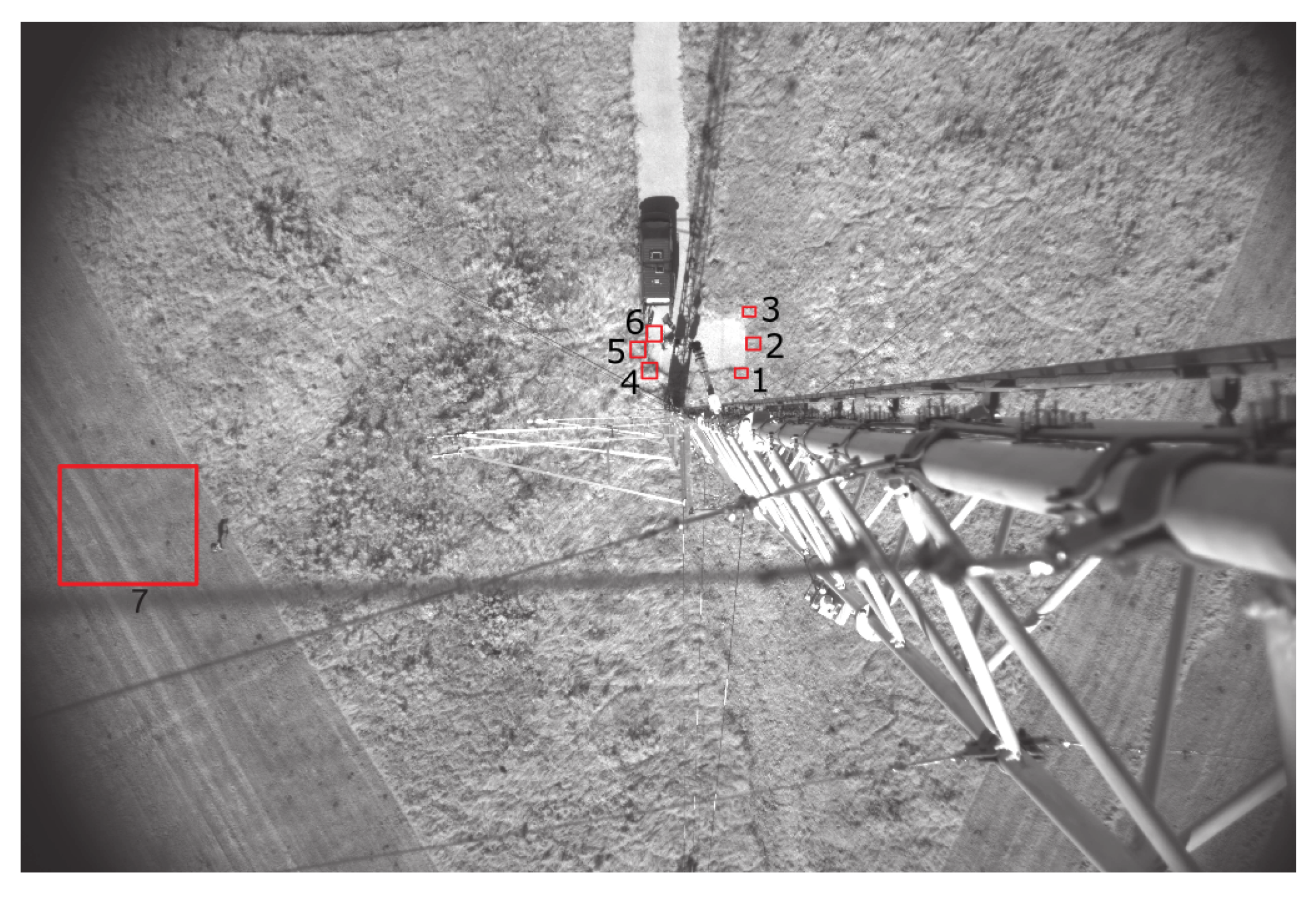
Figure 26.
Positions for phantom drops (VIS and LWIR).
Figure 26.
Positions for phantom drops (VIS and LWIR).
Figure 27.
Example detection of balloon phantom at about 35 °C in middle high grass at position 2.
Figure 27.
Example detection of balloon phantom at about 35 °C in middle high grass at position 2.
Figure 28.
Two pixel bat phantom cooling down over time.
Figure 28.
Two pixel bat phantom cooling down over time.
Figure 29.
Example detection of red kite phantom at about 35 °C in middle high grass at position 2.
Figure 29.
Example detection of red kite phantom at about 35 °C in middle high grass at position 2.
Figure 30.
Footsteps in high grass can produce false positives.
Figure 30.
Footsteps in high grass can produce false positives.
Table 1.
Definition of the preselection criteria.
Table 1.
Definition of the preselection criteria.
| # | Criterium Name | Criterium Rule |
|---|
| 1 | area | within limits |
| 2 | discernability over time | median(new, inner) − median(old, full) > threshold 1 |
| 3 | spatial discernability | median(new, inner) − median(new, outer) > threshold 2 |
| 4 | average score in surr. region | <threshold 3 |
Table 2.
Preselection criteria for test object in
Figure 16.
Table 2.
Preselection criteria for test object in
Figure 16.
| # | Criterium for LWIR Image | Calculated Value |
|---|
| 1 | ≥1 and ≤100 | 10 |
| 2 | >11 | 27 |
| 3 | >11 | 36 |
| 4 | <2.9 | 0.24 |
Table 3.
SSIM in % for true positive detection (
Figure 20).
Table 3.
SSIM in % for true positive detection (
Figure 20).
| t | 0–1 | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8–9 |
|---|
| | 99.3% | 99.6% | 99.6% | 99.7% | 55.7% | 99.7% | 99.5% | 99.7% | 99.6% |
Table 4.
SSIM in % for vector plot in
Figure 22.
Table 4.
SSIM in % for vector plot in
Figure 22.
| t | 0–1 | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8–9 |
|---|
| = 0.0 | 34.9% | 71.8% | 65.8% | 61.7% | 31.4% | 91.6% | 93.3% | 90.1% | 95.8% |
| = 0.01 | 63.4% | 84.3% | 79.4% | 79.0% | 40.1% | 92.2% | 93.6% | 90.5% | 96.0% |
| = 0.03 | 91.9% | 96.6% | 95.1% | 95.4% | 70.4% | 94.9% | 95.3% | 92.8% | 97.0% |
Table 5.
Definition of structural difference criteria.
Table 5.
Definition of structural difference criteria.
| # | Criterium Name | Criterium Rule |
|---|
| 4 | SDIFF of middle image pair | >threshold 3 |
| 5 | max SDIFF of side image pairs | <threshold 4 |
| 6 | SDIFF quotient | > threshold 5 |
Table 6.
Results of bat phantom drop tests.
Table 6.
Results of bat phantom drop tests.
| Position | Duration | TP | FN | FP | Sensitivity |
|---|
| 1 & 2 | | 15 | 6 | | 71.4% |
| 6 | | 16 | 4 | | 80.0% |
| all | 1 h 4 min | 31 | 10 | 0 | 75.6% |
Table 7.
False positives during nights from 10th to 12th.
Table 7.
False positives during nights from 10th to 12th.
| Night | Duration | FP | Reason |
|---|
| 10th 9:04 p.m.–11th 7:30 a.m. | 10 h 26 min | 28 | 1 to 3 pixel animal in field |
| | | 4 | bird sitting on guy cable |
| 11th 8:30 p.m.–12th 7:30 a.m. | 11 h | 20 | 1 to 3 pixel animal in field |
| | | 1 | wind changing radiation direction |
Table 8.
Results of red kite phantom drop tests.
Table 8.
Results of red kite phantom drop tests.
| Position | Duration | TP | FN | FP | Sensitivity |
|---|
| 1 | | 14 | 1 | | 93.3% |
| 2 | | 16 | 0 | | 100.0% |
| 3 | | 10 | 0 | | 100.0% |
| 4 | | 14 | 6 | | 70.0% |
| 5 | | 8 | 2 | | 80.0% |
| 6 | | 14 | 3 | | 82.3% |
| 7 | | 15 | 5 | | 75.0% |
| all | 2 h 21 min | 91 | 17 | 6 | 84.3% |
Table 9.
VIS False positives on 11th of August.
Table 9.
VIS False positives on 11th of August.
| Time | Duration | FP | Reason |
|---|
| 9:41 a.m. to 1:41 p.m. | 4 h | 2 | traces in the grass (people or tractor) |
| | | 9 | repositioning of non-phantom objects by ourselves |
| | | 1 | wind |
| 2:39 p.m. to 5:50 p.m. | 3 h 11 min | 2 | repositioning of non-phantom objects by ourselves |
| 5:53 p.m. to 8:47 p.m. | 2 h 54 min | 6 | traces in the grass (people) |
| | | 10 | repositioning of non-phantom objects by ourselves |
| | | 1 | shadow of the metmast |


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}