
GUBS: Graph-Based Unsupervised Brain Segmentation in MRI Images

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
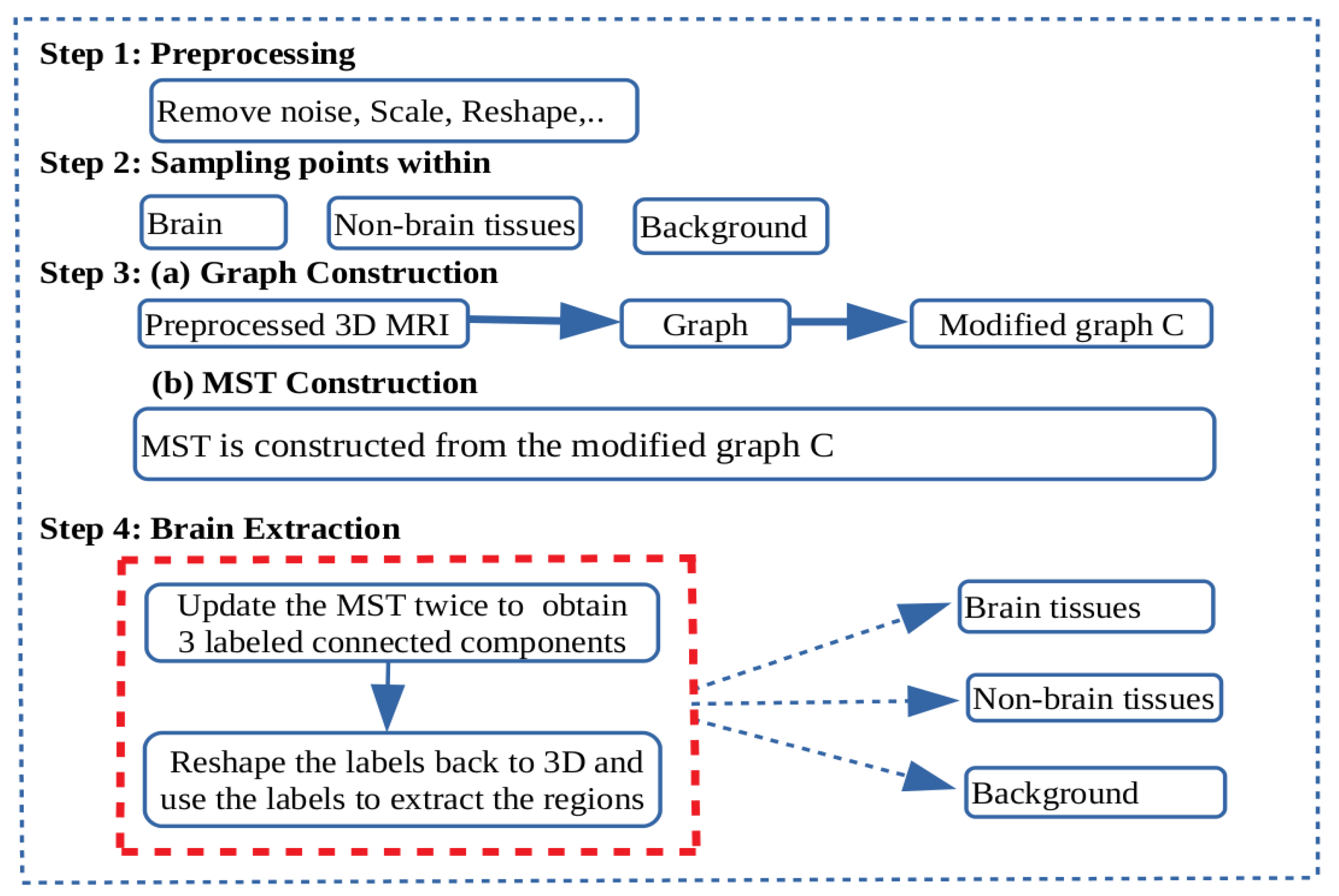
2.2. Methods
2.2.1. Preprocessing
2.2.2. Edge Surface Detection
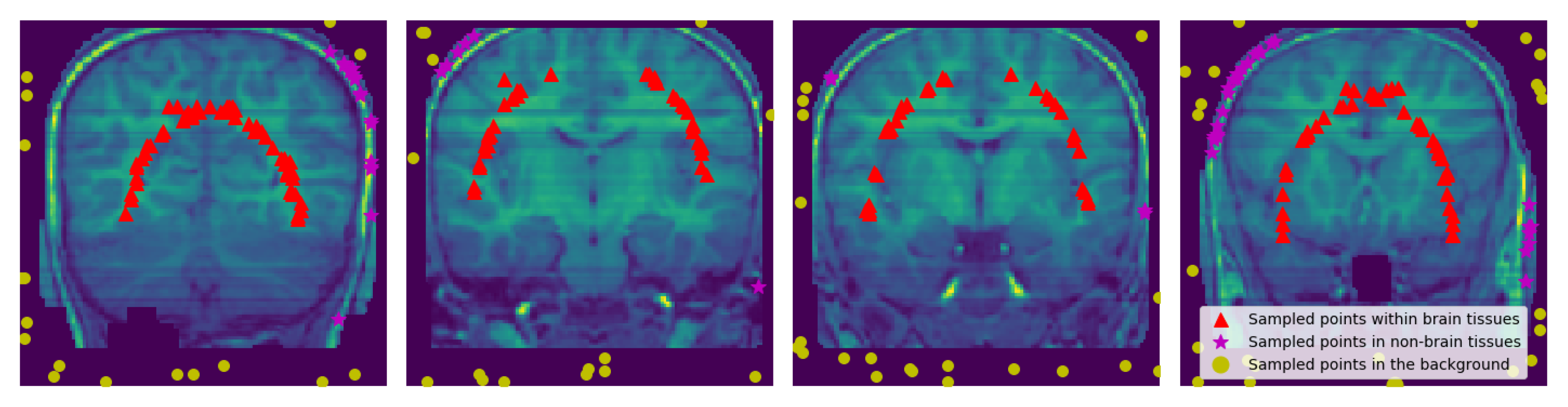
2.2.3. Sampling Points within the Brain, Non-Brain Tissues and Background
2.2.4. Graph
2.2.5. Collapsing Nodes
- For every edge e in G, if both end nodes of e appear in H the edge e is discarded.
- For every remaining edge e, if a node v in H appears in e, the edge e is modified by replacing v by h.
- Remove all the nodes in H except the node h from the modified graph to obtain the graph .
2.2.6. Segmentation Criteria
3. Results
3.1. Performance Analysis
Consistency Analysis of the GUBS across Different Data Sets
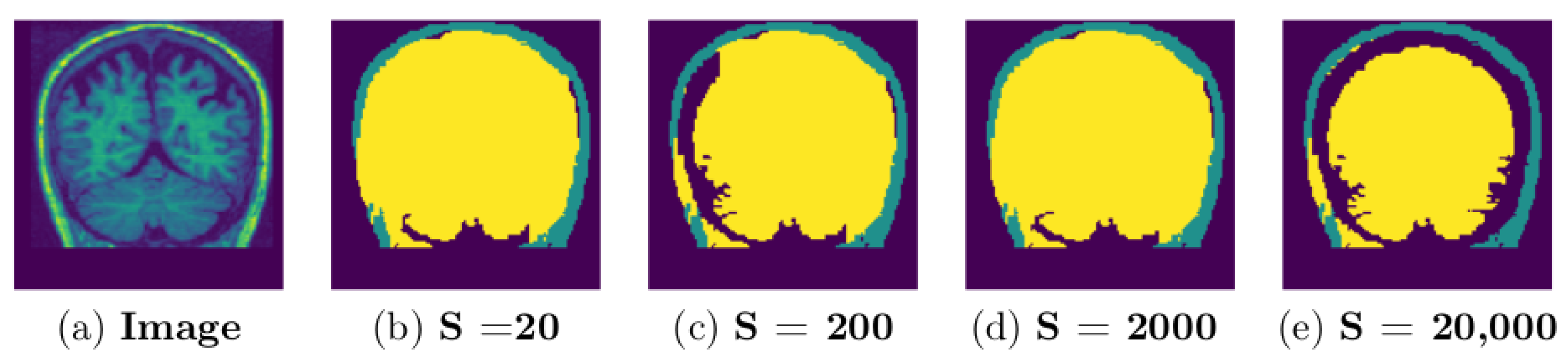
3.2. Parameter Selection
3.3. Experimental Timing
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Despotović, I.; Goossens, B.; Philips, W. MRI segmentation of the human brain: Challenges, methods, and applications. Comput. Math. Methods Med. 2015, 2015, 450341. [Google Scholar] [CrossRef] [PubMed]
- Kalavathi, P.; Prasath, V. Methods on skull stripping of MRI head scan images—A review. J. Digit. Imaging 2016, 29, 365–379. [Google Scholar] [CrossRef] [PubMed]
- Ramon, C.; Garguilo, P.; Fridgeirsson, E.A.; Haueisen, J. Changes in scalp potentials and spatial smoothing effects of inclusion of dura layer in human head models for EEG simulations. Front. Neuroeng. 2014, 7, 32. [Google Scholar] [CrossRef] [PubMed]
- Fatima, A.; Shahid, A.R.; Raza, B.; Madni, T.M.; Janjua, U.I. State-of-the-art traditional to the machine-and deep-learning-based skull stripping techniques, models, and algorithms. J. Digit. Imaging 2020, 33, 1443–1464. [Google Scholar] [CrossRef]
- Li, J.; Erdt, M.; Janoos, F.; Chang, T.C.; Egger, J. Medical image segmentation in oral-maxillofacial surgery. In Computer-Aided Oral and Maxillofacial Surgery; Academic Press: Cambridge, MA, USA, 2021; pp. 1–27. [Google Scholar]
- Hwang, H.; Rehman, H.Z.U.; Lee, S. 3D U-Net for skull stripping in brain MRI. Appl. Sci. 2019, 9, 569. [Google Scholar] [CrossRef]
- Kapur, T.; Grimson, W.E.L.; Wells, W.M., III; Kikinis, R. Segmentation of brain tissue from magnetic resonance images. Med. Image Anal. 1996, 1, 109–127. [Google Scholar] [CrossRef]
- Gui, L.; Lisowski, R.; Faundez, T.; Hüppi, P.S.; Lazeyras, F.; Kocher, M. Morphology-driven automatic segmentation of MR images of the neonatal brain. Med. Image Anal. 2012, 16, 1565–1579. [Google Scholar] [CrossRef]
- Lucena, O.; Souza, R.; Rittner, L.; Frayne, R.; Lotufo, R. Convolutional neural networks for skull-stripping in brain MR imaging using silver standard masks. Artif. Intell. Med. 2019, 98, 48–58. [Google Scholar] [CrossRef]
- Rehman, H.Z.U.; Hwang, H.; Lee, S. Conventional and deep learning methods for skull stripping in brain MRI. Appl. Sci. 2020, 10, 1773. [Google Scholar] [CrossRef]
- Lemieux, L.; Hagemann, G.; Krakow, K.; Woermann, F.G. Fast, accurate, and reproducible automatic segmentation of the brain in T1-weighted volume MRI data. Magn. Reson. Med. 1999, 42, 127–135. [Google Scholar] [CrossRef]
- Smith, S.M. BET: Brain Extraction Tool. In FMRIB TR00SMS2b (Oxford Centre for Functional Magnetic Resonance Imaging of the Brain); Department of Clinical Neurology, Oxford University, John Radcliffe Hospital: Headington, UK, 2000; pp. 1–25. [Google Scholar]
- Dale, A.M.; Fischl, B.; Sereno, M.I. Cortical surface-based analysis: I. Segmentation and surface reconstruction. Neuroimage 1999, 9, 179–194. [Google Scholar] [CrossRef] [PubMed]
- Shattuck, D.W.; Leahy, R.M. BrainSuite: An automated cortical surface identification tool. Med. Image Anal. 2002, 6, 129–142. [Google Scholar] [CrossRef]
- Ségonne, F.; Dale, A.M.; Busa, E.; Glessner, M.; Salat, D.; Hahn, H.K.; Fischl, B. A hybrid approach to the skull stripping problem in MRI. Neuroimage 2004, 22, 1060–1075. [Google Scholar] [CrossRef] [PubMed]
- Iglesias, J.E.; Liu, C.Y.; Thompson, P.M.; Tu, Z. Robust brain extraction across datasets and comparison with publicly available methods. IEEE Trans. Med. Imaging 2011, 30, 1617–1634. [Google Scholar] [CrossRef]
- Galdames, F.J.; Jaillet, F.; Perez, C.A. An accurate skull stripping method based on simplex meshes and histogram analysis for magnetic resonance images. J. Neurosci. Methods 2012, 206, 103–119. [Google Scholar] [CrossRef]
- Roy, S.; Maji, P. A simple skull stripping algorithm for brain MRI. In Proceedings of the 2015 Eighth International Conference on Advances in Pattern Recognition (ICAPR), Kolkata, India, 4–7 January 2015; pp. 1–6. [Google Scholar]
- Fatima, A.; Madni, T.M.; Anwar, F.; Janjua, U.I.; Sultana, N. Automated 2D Slice-Based Skull Stripping Multi-View Ensemble Model on NFBS and IBSR Datasets. J. Digit. Imaging 2022, 35, 374–384. [Google Scholar] [CrossRef]
- Rampun, A.; Jarvis, D.; Griffiths, P.D.; Zwiggelaar, R.; Scotney, B.W.; Armitage, P.A. Single-Input Multi-Output U-Net for Automated 2D Foetal Brain Segmentation of MR Images. J. Imaging 2021, 7, 200. [Google Scholar] [CrossRef]
- Sadananthan, S.A.; Zheng, W.; Chee, M.W.; Zagorodnov, V. Skull stripping using graph cuts. NeuroImage 2010, 49, 225–239. [Google Scholar] [CrossRef]
- Marcus, D.S.; Wang, T.H.; Parker, J.; Csernansky, J.G.; Morris, J.C.; Buckner, R.L. Open Access Series of Imaging Studies (OASIS): Cross-sectional MRI data in young, middle aged, nondemented, and demented older adults. J. Cogn. Neurosci. 2007, 19, 1498–1507. [Google Scholar] [CrossRef]
- Aubert-Broche, B.; Evans, A.C.; Collins, L. A new improved version of the realistic digital brain phantom. NeuroImage 2006, 32, 138–145. [Google Scholar] [CrossRef]
- Cocosco, C.A.; Kollokian, V.; Kwan, R.K.S.; Pike, G.B.; Evans, A.C. Brainweb: Online interface to a 3D MRI simulated brain database. NeuroImage 1997, 5, 425. [Google Scholar]
- Rohlfing, T. Image similarity and tissue overlaps as surrogates for image registration accuracy: Widely used but unreliable. IEEE Trans. Med. Imaging 2011, 31, 153–163. [Google Scholar] [CrossRef] [PubMed]
- Kleesiek, J.; Urban, G.; Hubert, A.; Schwarz, D.; Maier-Hein, K.; Bendszus, M.; Biller, A. Deep MRI brain extraction: A 3D convolutional neural network for skull stripping. NeuroImage 2016, 129, 460–469. [Google Scholar] [CrossRef] [PubMed]
- Brett, M.; Markiewicz, C.J.; Hanke, M.; Côté, M.A.; Cipollini, B.; McCarthy, P.; Jarecka, D.; Cheng, C.P.; Halchenko, Y.O.; Cottaar, M.; et al. nipy/nibabel: 3.2.1. 2020. Available online: https://doi.org/10.5281/zenodo.4295521 (accessed on 1 February 2022). [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]
- Heng, P.; Wang, L.; Wong, T.; Leung, K.; Cheng, J.C.Y. Edge surface extraction from 3D images. In Proceedings of the Medical Imaging 2001: Image Processing, San Diego, CA, USA, 17–22 February 2001; Volume 4322, pp. 407–416. [Google Scholar]
- Bomans, M.; Hohne, K.H.; Tiede, U.; Riemer, M. 3-D segmentation of MR images of the head for 3-D display. IEEE Trans. Med. Imaging 1990, 9, 177–183. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Morris, O.; Lee, M.d.J.; Constantinides, A. Graph theory for image analysis: An approach based on the shortest spanning tree. IEE Proc. (Commun. Radar Signal Process.) 1986, 133, 146–152. [Google Scholar] [CrossRef]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Waskom, M.; Botvinnik, O.; O’Kane, D.; Hobson, P.; Lukauskas, S.; Gemperline, D.C.; Augspurger, T.; Halchenko, Y.; Cole, J.B.; Warmenhoven, J.; et al. mwaskom/seaborn: V0.8.1 (September 2017). Available online: https://doi.org/10.5281/zenodo.883859 (accessed on 1 February 2022). [CrossRef]
- Mayala, S.; Herdlevær, I.V.; Bull Haugsøen, J.; Anandan, S.; Gavasso, S.; Brun, M. Brain Tumor Segmentation Based on Minimum Spanning Tree. Front. Signal Process. 2022, 2, 816186. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| JI (mean ± sd) | DSC (mean ± sd) | Sensitivity (mean ± sd) | Specificity (mean ± sd) | |
|---|---|---|---|---|
| STAPLE | - | 0.960960 ± 0.0070 | 0.989830 ± 0.0060 | 0.951880 ± 0.0200 |
| CONSNet | - | 0.955480 ± 0.0100 | 0.990550 ± 0.0060 | 0.939800 ± 0.0280 |
| GUBS | 0.872633 ± 0.0148 | 0.931918 ± 0.0084 | 0.937179 ± 0.0256 | 0.974223 ± 0.0101 |
| JI (mean ± sd) | DSC (mean ± sd) | Sensitivity (mean ± sd) | Specificity (mean ± sd) | |
|---|---|---|---|---|
| BSE | 0.875000 ± 0.0490 | 0.932000 ± 0.0310 | 0.991000 ± 0.0040 | 0.979000 ± 0.0120 |
| HWA | 0.685000 ± 0.0170 | 0.813000 ± 0.0120 | 1.000000 ± 0.0010 | 0.928000 ± 0.0050 |
| SMHASS | 0.904000 ± 0.0110 | 0.950000 ± 0.0060 | 0.990000 ± 0.0030 | 0.985000 ± 0.0020 |
| GUBS | 0.982396 ± 0.0271 | 0.990927 ± 0.0141 | 0.984012 ± 0.0268 | 0.999356 ± 0.0005 |
| JI (mean ± sd) | DSC (mean ± sd) | Sensitivity (mean ± sd) | Specificity (mean ± sd) | |
|---|---|---|---|---|
| HWA | 0.814000 ± 0.0360 | 0.897000 ± 0.0220 | 1.000000 ± 0.0000 | 0.966000 ± 0.0120 |
| SMHASS | 0.905000 ± 0.0300 | 0.950000 ± 0.0170 | 0.992000 ± 0.0100 | 0.985000 ± 0.0090 |
| MVU-Net | - | 0.908100 | 0.941400 | 0.989400 |
| GUBS | 0.859300 ±0.0176 | 0.924229 ± 0.0102 | 0.918936 ± 0.0334 | 0.980869 ± 0.0104 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayala, S.; Herdlevær, I.; Haugsøen, J.B.; Anandan, S.; Blaser, N.; Gavasso, S.; Brun, M. GUBS: Graph-Based Unsupervised Brain Segmentation in MRI Images. J. Imaging 2022, 8, 262. https://doi.org/10.3390/jimaging8100262
Mayala S, Herdlevær I, Haugsøen JB, Anandan S, Blaser N, Gavasso S, Brun M. GUBS: Graph-Based Unsupervised Brain Segmentation in MRI Images. Journal of Imaging. 2022; 8(10):262. https://doi.org/10.3390/jimaging8100262
Chicago/Turabian StyleMayala, Simeon, Ida Herdlevær, Jonas Bull Haugsøen, Shamundeeswari Anandan, Nello Blaser, Sonia Gavasso, and Morten Brun. 2022. "GUBS: Graph-Based Unsupervised Brain Segmentation in MRI Images" Journal of Imaging 8, no. 10: 262. https://doi.org/10.3390/jimaging8100262
APA StyleMayala, S., Herdlevær, I., Haugsøen, J. B., Anandan, S., Blaser, N., Gavasso, S., & Brun, M. (2022). GUBS: Graph-Based Unsupervised Brain Segmentation in MRI Images. Journal of Imaging, 8(10), 262. https://doi.org/10.3390/jimaging8100262