


Angle-Retaining Chromaticity and Color Space: Invariants and Properties


Abstract
:1. Introduction
- We compare two alternative formulations of the conversion from ARC to RGB, based on different geometric interpretations: a first formulation described in the original introduction of the ARC space [6], and a second formulation derived from a work by Chen et al. [29] on the definition of a spherical color space. Specifically for this paper, we characterize the two formulations in terms of precision in numerical representation.
- We characterize how small perturbations in the original RGB triplets map as changes in various chromaticity diagrams. A similar analysis was originally conducted in [7], providing a shape description of the local distortions introduced with chromaticity representations. In contrast, here we instead describe the intensity of such deformations, formulated with a novel approach. This information is both presented qualitatively with intuitive representations, as well as quantified numerically.
- We present an analytical study on the invariance of each component of the ARC space to various perturbations in the input RGB triplets as related to different changes in environmental illumination conditions. This analysis borrows existing definitions of light transformations [30], and provides an entirely original mathematical derivation.
- We explore the perceptual properties of the ARC space by referring to the standard Munsell hue data, and propose a direction for improvement in future works. Previous works related to ARC did not provide any study or insight into its relationship with physiological data, which can be considered important for color reproduction applications.
2. Angle-Retaining Chromaticity and Color Space
2.1. RGB-to-ARC Transformation
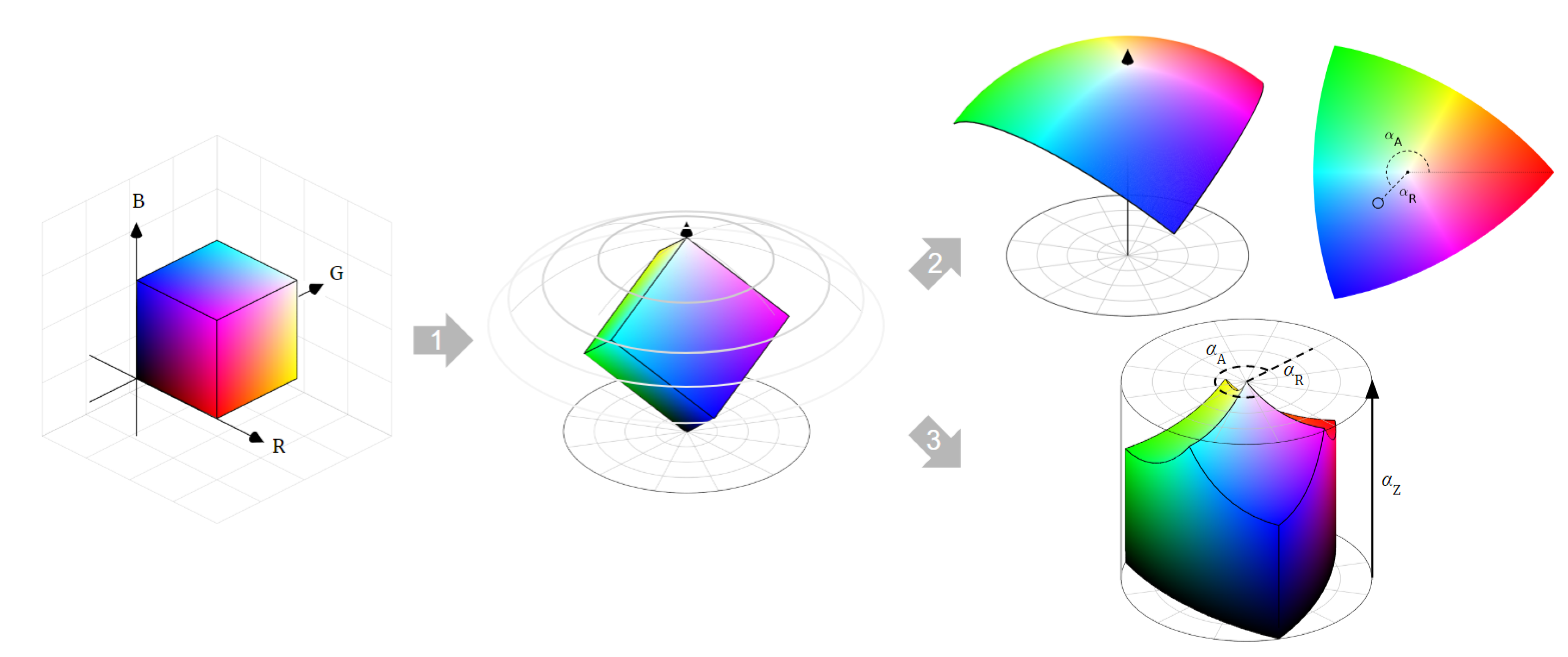
- The RGB cube is rotated so that the neutral gray axis becomes the new vertical axis, and so that the pure green vertex is positioned in the 3D octant of the resulting coordinate system having negative x, and positive y and z. The representation is also brought from Cartesian coordinates into polar coordinates (e.g., ).
- For the 2D ARC diagram, the radial distance is intentionally dropped, to discard the intensity information. The authors in [7] show that this operation corresponds to expanding all RGB points to the surface of a sphere with the center in the origin and flattening such a sphere by following an equidistant projection, which preserves the great-circle distances with respect to the point of neutral grays. This guarantees the main properties that angular distances in RGB are retained as Euclidean distances in ARC.
- For the 3D ARC space, the spherical polar coordinates are reinterpreted as cylindrical polar coordinates, and if necessary brought into Cartesian coordinates. As shown by the authors [6], this guarantees that the angle-retaining property of ARC is maintained for each “horizontal slice” of the 3D space (i.e., by ignoring the third dimension when computing Euclidean distances).
2.2. ARC-to-RGB Transformation
- A half-plane in the RGB space that hinges on the neutral axis, with an orientation depending on the value of .
- An infinite cone with its vertex in the RGB origin, and its axis corresponding to the neutral axis. The aperture of this cone is directly related to the value of .
- A sphere having its center in the RGB origin, and radius equivalent to .
- Transformation from the polar coordinates to Cartesian coordinates.
- Inverse rotation of the three axes.
3. Properties of the 2D ARC Diagram
- “Maxwell” is computed by projecting the three components onto a plane perpendicular to the neutral axis. It is named in reference to the pioneering works on color by James Clerk Maxwell [23].
- “HSV” refers to the traditional hue–saturation–value color space, from which we consider the chromatic components hue and saturation. Although not typically used in the domain of color constancy, we chose to include it for comparison due to its conceptual similarity to ARC.
- The distortion of each diagram is normalized for its distortion level in the case of a neutral gray, in order to remove a global bias related to different orders of magnitude.
- The normalization allows observing, at a glance, the differences in distortion impacts across different diagrams.
4. Properties of 3D ARC Space
- On the surface of the half-plane in the RGB space, whose equation is defined by .
- On the surface of the infinite cone in the RGB space, whose equation is defined by .
- On the surface of the sphere of the RGB space, whose equation is defined by .
4.1. Light Intensity Change
4.2. Light Intensity Shift
4.3. Light Intensity Change and Shift
4.4. Light Color Change
4.5. Light Color Change and Shift
5. ARC Properties Related to Human Perception
- We select all patches with intermediate Munsell value = 5; therefore, varying the Munsell hue and Munsell chroma, and plotting them in the ARC diagram, connecting patches relative to the same Munsell hue group. The resulting plot, shown in Figure 7 (left) with 40 hues radiating from the center, is not composed of straight lines, especially for highly-saturated purple, red, and lime areas. This implies that moving in the direction defined by the component does not guarantee perceived hue invariance.
- We select all patches with intermediate Munsell chroma = 8; therefore, varying the Munsell hue and Munsell value, and once again plotting them in ARC and grouping the points by the Munsell hue. The result, shown in Figure 7 (right), is equivalent to plotting the information in the 3D arc space and then observing the data from the “top view”, i.e., neglecting the intensity component. In addition to the already commented upon the effect of hue instability, it can be observed that the Munsell value does not correspond to the ARC intensity component: each Munsell hue group in fact appears as radiating from the center, instead of being composed of overlapping points.
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Properties of 3D ARC Space—Derivation
Appendix A.1. Light Intensity Change
Appendix A.2. Light Intensity Shift
Appendix A.3. Light Intensity Change and Shift
Appendix A.4. Light Color Change
Appendix A.5. Light Color Change and Shift
References
- Kuehni, R. Color spaces. Scholarpedia 2010, 5, 9606. [Google Scholar] [CrossRef]
- Tang, B.; Sapiro, G.; Caselles, V. Color image enhancement via chromaticity diffusion. IEEE Trans. Image Process. 2001, 10, 701–707. [Google Scholar] [CrossRef] [PubMed]
- Vazquez-Corral, J.; Bertalmio, M. Angular-based preprocessing for image denoising. IEEE Signal Process. Lett. 2017, 25, 219–223. [Google Scholar] [CrossRef]
- Li, X.; Plataniotis, K.N. Novel chromaticity similarity based color texture descriptor for digital pathology image analysis. PLoS ONE 2018, 13, e0206996. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Buzzelli, M.; Bianco, S.; Schettini, R. Angle-Retaining Color Space for Color Data Visualization and Analysis. In Proceedings of the International Colour Association (AIC) Conference, Milan, Italy, 30 August–3 September 2021; pp. 245–250. [Google Scholar]
- Buzzelli, M.; Bianco, S.; Schettini, R. ARC: Angle-Retaining Chromaticity diagram for color constancy error analysis. J. Opt. Soc. Am. A 2020, 37, 1721–1730. [Google Scholar] [CrossRef]
- Hordley, S.D.; Finlayson, G.D. Reevaluation of color constancy algorithm performance. J. Opt. Soc. Am. A 2006, 23, 1008–1020. [Google Scholar] [CrossRef]
- Gijsenij, A.; Gevers, T.; Lucassen, M.P. Perceptual analysis of distance measures for color constancy algorithms. J. Opt. Soc. Am. A 2009, 26, 2243–2256. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Zakizadeh, R. Reproduction angular error: An improved performance metric for illuminant estimation. Perception 2014, 310, 1–26. [Google Scholar]
- Afifi, M.; Price, B.; Cohen, S.; Brown, M.S. When color constancy goes wrong: Correcting improperly white-balanced images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 1535–1544. [Google Scholar]
- Finlayson, G.D.; Hordley, S.D.; Hubel, P.M. Color by correlation: A simple, unifying framework for color constancy. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1209–1221. [Google Scholar] [CrossRef]
- Aytekin, C.; Nikkanen, J.; Gabbouj, M. INTEL-TUT Dataset for Camera Invariant Color Constancy Research. arXiv 2017, arXiv:1703.09778. [Google Scholar]
- Finlayson, G.D.; Drew, M.S.; Lu, C. Intrinsic images by entropy minimization. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2004; pp. 582–595. [Google Scholar]
- Barron, J.T. Convolutional color constancy. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 379–387. [Google Scholar]
- Afifi, M.; Brown, M.S. Sensor-independent illumination estimation for DNN models. arXiv 2019, arXiv:1912.06888. [Google Scholar]
- Gao, S.B.; Zhang, M.; Li, Y.J. Improving color constancy by selecting suitable set of training images. Opt. Express 2019, 27, 25611–25633. [Google Scholar] [CrossRef] [PubMed]
- Barnard, K.; Cardei, V.; Funt, B. A comparison of computational color constancy algorithms. I: Methodology and experiments with synthesized data. IEEE Trans. Image Process. 2002, 11, 972–984. [Google Scholar] [CrossRef] [PubMed]
- Hemrit, G.; Finlayson, G.D.; Gijsenij, A.; Gehler, P.V.; Bianco, S.; Drew, M.; Funt, B.; Shi, L. Providing a Single Ground-truth for Illuminant Estimation for the ColorChecker Dataset. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 1286–1287. [Google Scholar] [CrossRef]
- Banić, N.; Koščević, K.; Lončarić, S. Unsupervised learning for color constancy. arXiv 2017, arXiv:1712.00436. [Google Scholar]
- Cardei, V.C.; Funt, B.; Barnard, K. Estimating the scene illumination chromaticity by using a neural network. J. Opt. Soc. Am. A 2002, 19, 2374–2386. [Google Scholar] [CrossRef]
- Cheng, D.; Price, B.; Cohen, S.; Brown, M.S. Effective learning-based illuminant estimation using simple features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1000–1008. [Google Scholar]
- Malacara, D. Color Vision and Colorimetry: Theory and Applications; SPIE: Bellingham, WA, USA, 2011; Volume PM204, p. 188. [Google Scholar]
- Smith, T.; Guild, J. The CIE colorimetric standards and their use. Trans. Opt. Soc. 1931, 33, 73. [Google Scholar] [CrossRef]
- Ohta, N. Correspondence between CIELAB and CIELUV color differences. Color Res. Appl. 1977, 2, 178–182. [Google Scholar] [CrossRef]
- Munsell, A.H. A pigment color system and notation. Am. J. Psychol. 1912, 23, 236–244. [Google Scholar] [CrossRef]
- Buzzelli, M.; Erba, I. On the evaluation of temporal and spatial stability of color constancy algorithms. J. Opt. Soc. Am. A 2021, 38, 1349–1356. [Google Scholar] [CrossRef] [PubMed]
- Burt, J.E.; Barber, G.M.; Rigby, D.L. Elementary Statistics for Geographers; Guilford Press: New York, NY, USA, 2009. [Google Scholar]
- Chen, T.; Deng, Z.; Ma, J. A spherical perceptual color model. In Color Imaging XVIII: Displaying, Processing, Hardcopy, and Applications; SPIE: New York, NY, USA, 2013; Volume 8652, p. 865202. [Google Scholar]
- Van De Sande, K.; Gevers, T.; Snoek, C. Evaluating color descriptors for object and scene recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 1582–1596. [Google Scholar] [CrossRef] [PubMed]
- Buzzelli, M.; Bianco, S.; Schettini, R. ARC: Angle-Retaining Chromaticity Diagram for Color Constancy Error Analysis. 2020. Available online: http://www.ivl.disco.unimib.it/activities/arc/ (accessed on 19 August 2022).
- Woo, S.M.; Kim, J.O. Deep Dichromatic Guided Learning for Illuminant Estimation. IEEE Trans. Image Process. 2021, 30, 3623–3636. [Google Scholar] [CrossRef] [PubMed]
- Bianco, S.; Buzzelli, M.; Ciocca, G.; Schettini, R.; Tchobanou, M.; Zini, S. Analysis of Biases in Automatic White Balance Datasets. In Proceedings of the International Colour Association (AIC) Conference, Milan, Italy, 30 August–3 September 2021; pp. 233–238. [Google Scholar]
- Buzzelli, M.; Zini, S.; Bianco, S.; Ciocca, G.; Schettini, R.; Tchobanou, M.K. Analysis of Biases in Automatic White Balance. Color Res. Appl. 2022. [Google Scholar] [CrossRef]
- Shi, W.; Loy, C.C.; Tang, X. Deep specialized network for illuminant estimation. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 371–387. [Google Scholar]
- Von Kries, J. Theoretische studien über die umstimmung des sehorgans. In Festschrift der Albrecht-Ludwigs-Universität; Wagner: Freiburg, Germany, 1902; Volume 32, pp. 145–158. [Google Scholar]
- Logvinenko, A.D.; Funt, B.; Mirzaei, H.; Tokunaga, R. Rethinking colour constancy. PLoS ONE 2015, 10, e0135029. [Google Scholar] [CrossRef]
- Newhall, S.M.; Nickerson, D.; Judd, D.B. Final report of the OSA subcommittee on the spacing of the Munsell colors. J. Opt. Soc. Am. 1943, 33, 385–418. [Google Scholar] [CrossRef]
- Munsell Color Science Lab Educational Resources|Munsell Color Science Lab|College of Science|RIT. 2019. Available online: https://www.rit.edu/science/munsell-color-science-lab-educational-resources#munsell-renotation-data (accessed on 12 July 2022).
- Fairchild, M.D. Individual differences in color matching and adaptation: Theory and practice. In Color and Imaging Conference; Society for Imaging Science and Technology: Cambridge, MA, USA, 2016; pp. 115–120. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chromaticity Diagram | St. Dev. (R) | St. Dev. (G) | St. Dev. (B) | St. Dev. (Average) |
|---|---|---|---|---|
| ARC | 0.0103 | 0.0103 | 0.0103 | 0.0103 |
| ratio | 0.3945 | 0.3945 | 0.2245 | 0.3378 |
| uv | 0.1630 | 0.1630 | 0.1658 | 0.1639 |
| rg | 0.0769 | 0.0769 | 0.0556 | 0.0698 |
| Maxwell | 0.0609 | 0.0609 | 0.0609 | 0.0609 |
| HS (HSV) | 0.1193 | 0.1193 | 0.1193 | 0.1193 |
| ARC Component | Light Intensity Change | Light Intensity Shift | Light Intensity Change and Shift | Light Color Change | Light Color Change and Shift |
|---|---|---|---|---|---|
| (Hue-like) | Invariant | Invariant | Invariant | Conditional | Conditional |
| (Saturation-like) | Invariant | Not invariant | Not invariant | Conditional | Conditional |
| (Intensity-like) | Not invariant | Not invariant | Conditional | Conditional | Conditional |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buzzelli, M. Angle-Retaining Chromaticity and Color Space: Invariants and Properties. J. Imaging 2022, 8, 232. https://doi.org/10.3390/jimaging8090232
Buzzelli M. Angle-Retaining Chromaticity and Color Space: Invariants and Properties. Journal of Imaging. 2022; 8(9):232. https://doi.org/10.3390/jimaging8090232
Chicago/Turabian StyleBuzzelli, Marco. 2022. "Angle-Retaining Chromaticity and Color Space: Invariants and Properties" Journal of Imaging 8, no. 9: 232. https://doi.org/10.3390/jimaging8090232
APA StyleBuzzelli, M. (2022). Angle-Retaining Chromaticity and Color Space: Invariants and Properties. Journal of Imaging, 8(9), 232. https://doi.org/10.3390/jimaging8090232