


Simple Color Calibration Method by Projection onto Retroreflective Materials



Abstract
:1. Introduction
2. Measurement of Reflectance Characteristics
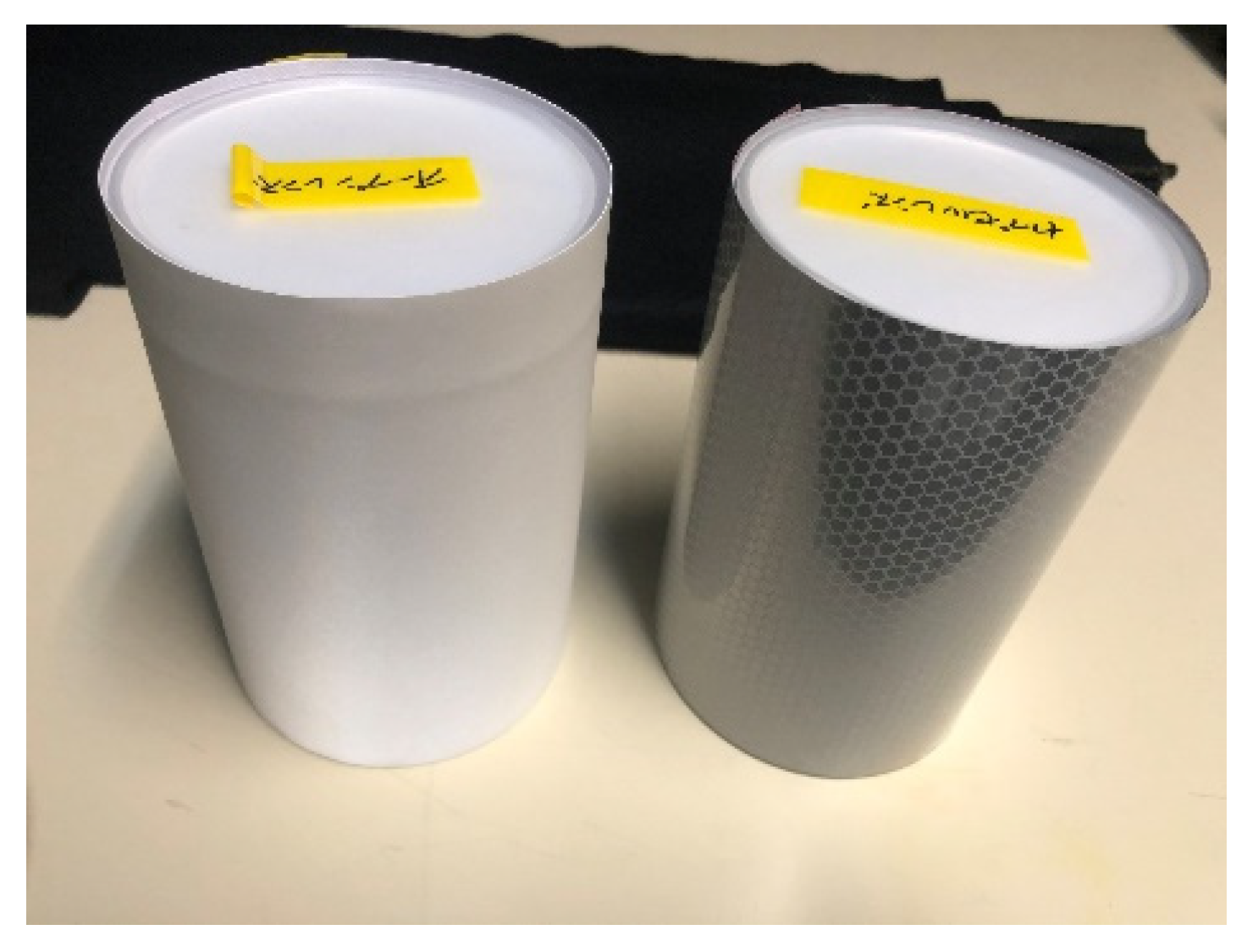
2.1. Measured Objects
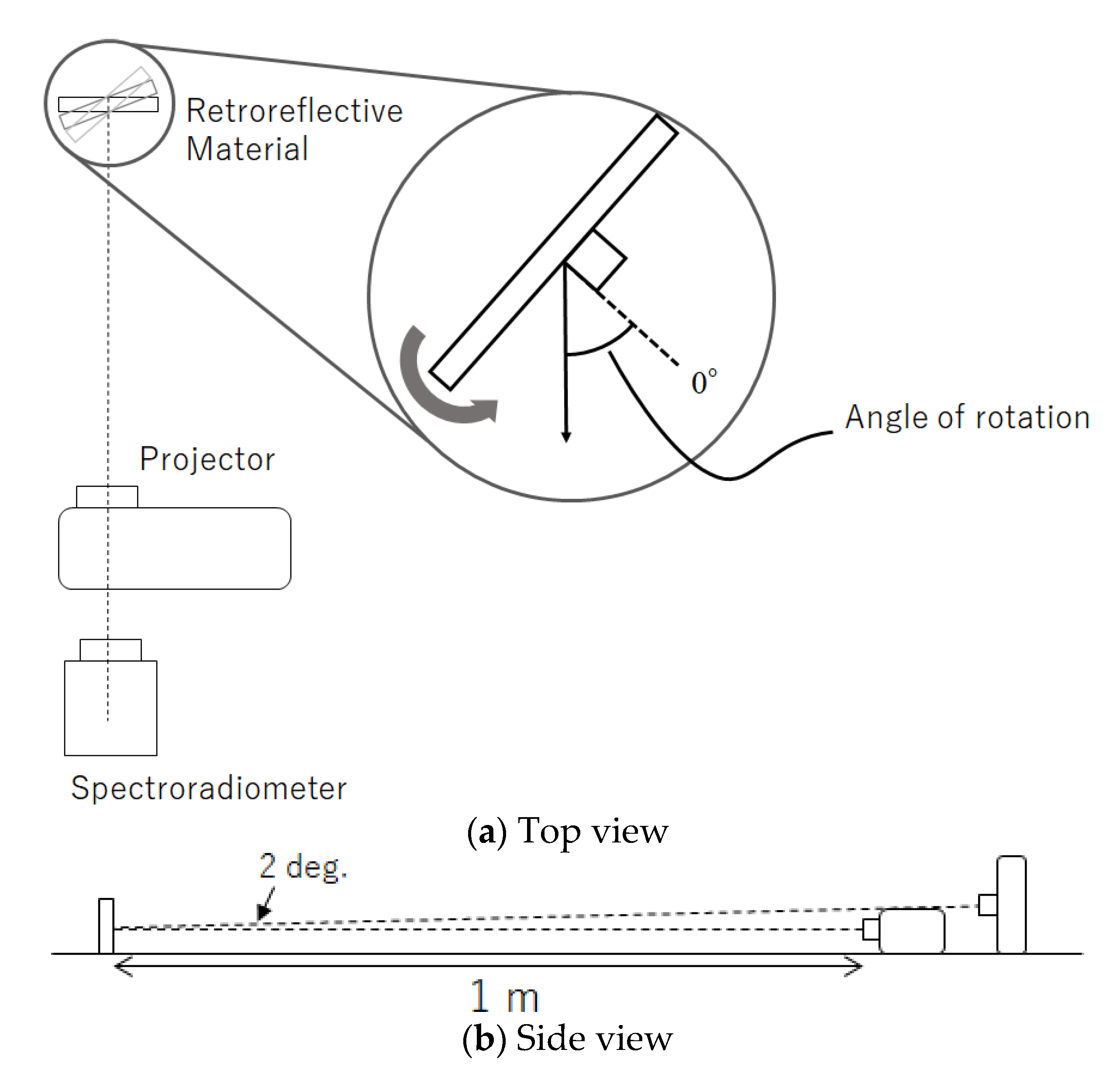
2.2. Measurement Environment
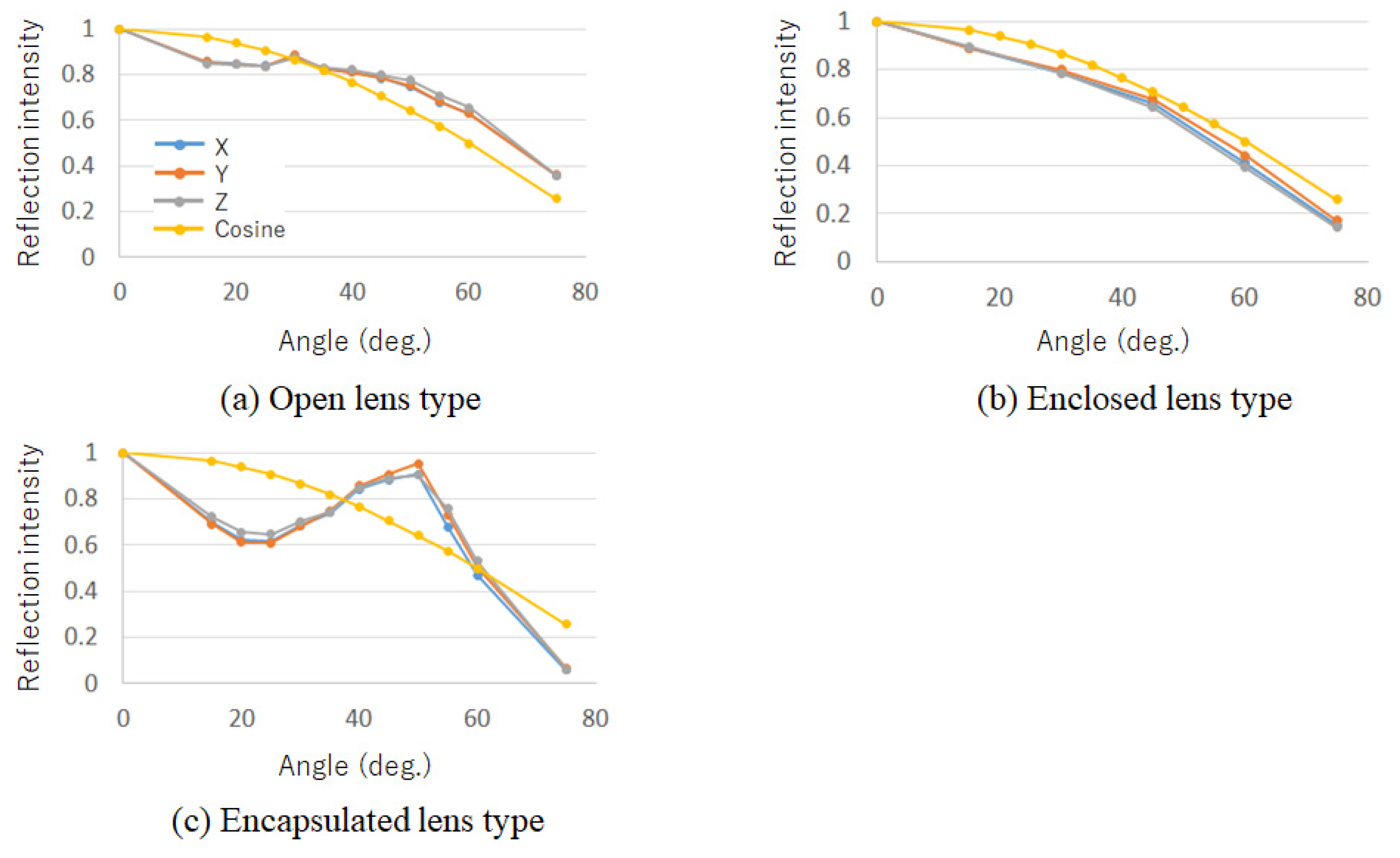
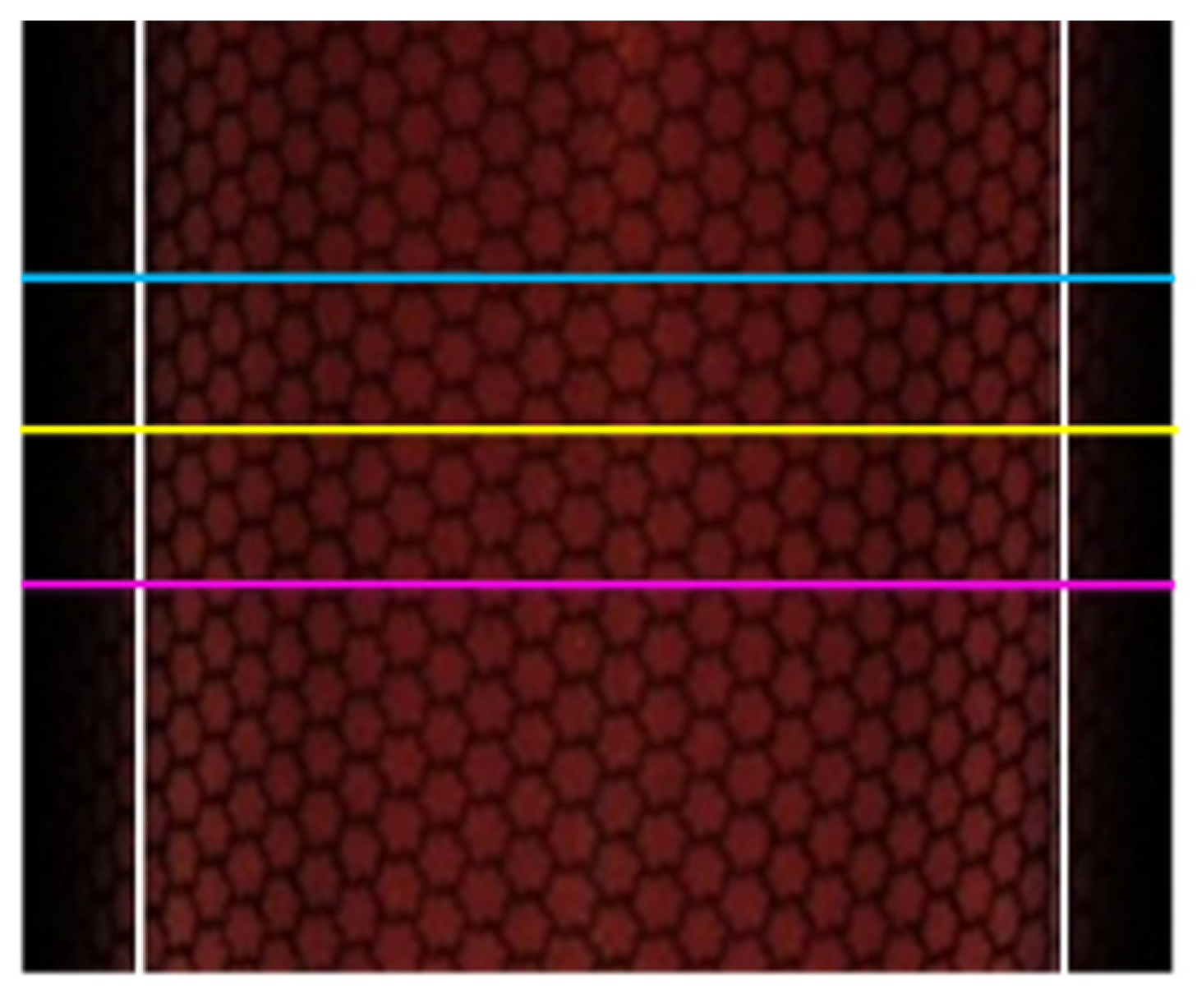
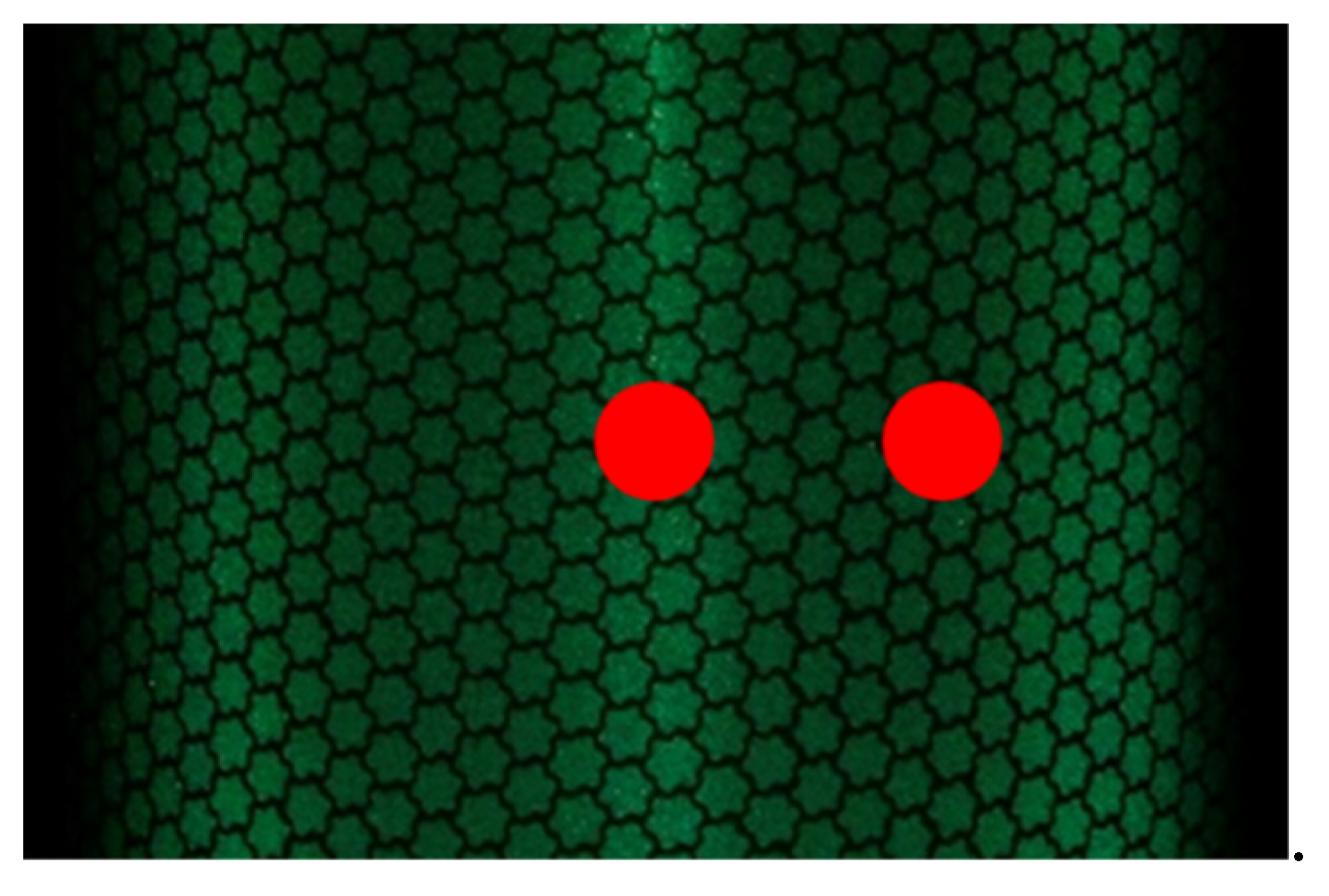
2.3. Reflection Characteristics
3. Color Calibration Method
3.1. Method of Determining the Number of Reference Points
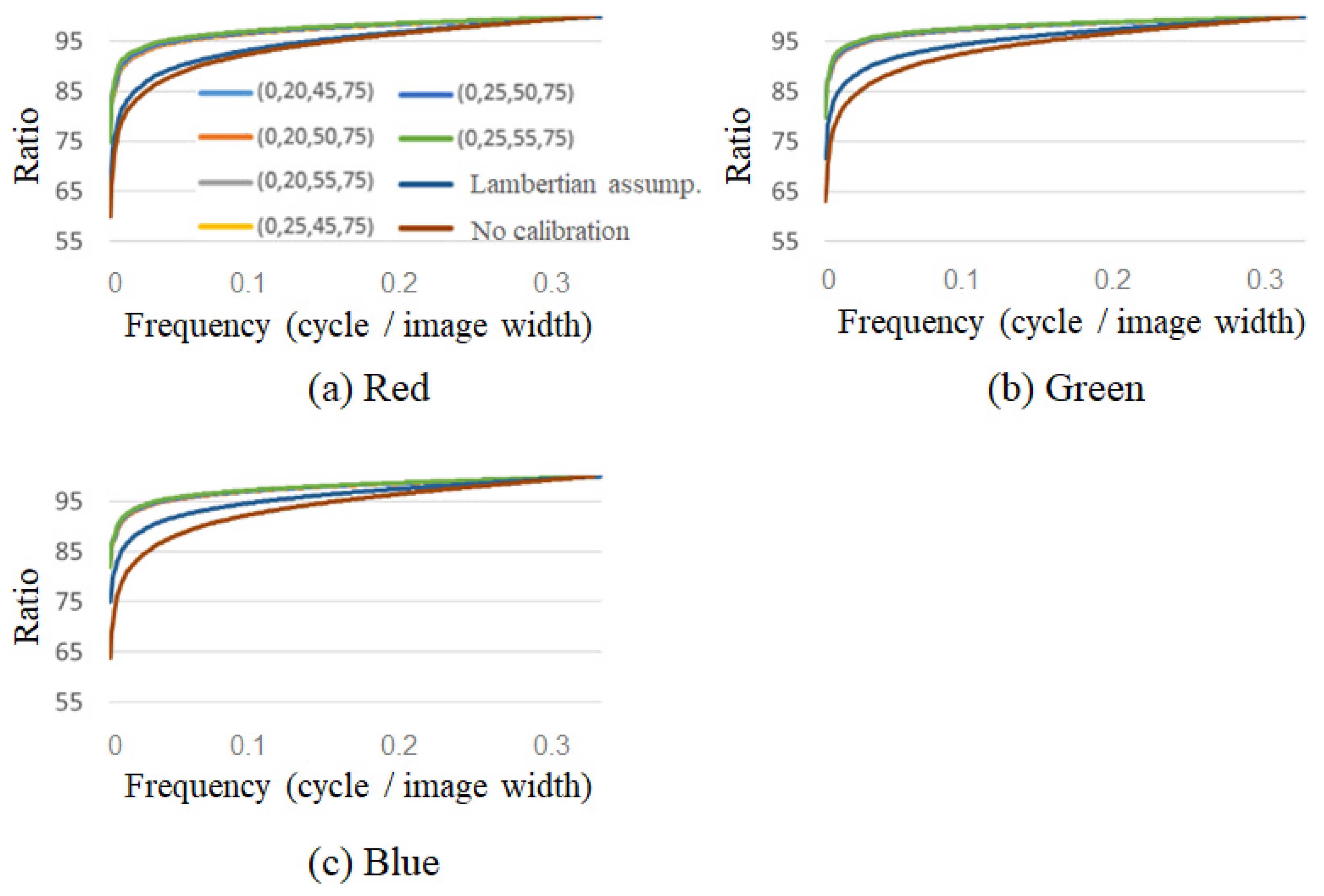
- The number of reference points compared ranged from 3 to 6. For the open model, the reference points were selected from the range of 0°–75°, and for the capsule model, from 0°–55°, with both ends (0° and 75° or 55°) fixed and equally spaced between the two angles.
- Using the data for each reference point, a quadratic B-spline function was used to interpolate the reflection intensity data (CIE XYZ) in 1° increments for open and encapsulated ranges.
- The difference between the interpolated data in each range obtained in this study and the data obtained in the measurement was calculated for the reflection intensity data, and the maximum likelihood L in Equation (1) was used to calculate the AIC. Specifically, assuming that the approximation errors at each angle were independent of each other and normally distributed with mean zero and variance , the maximum likelihood L was calculated as follows:where Q means the sum of squares of the approximation error, N represents the number of reference data used to compute the approximation error (N = 76 for the open lens type and N = 56 for the encapsulated lens type), and is the maximum likelihood estimator of , using the relationship .
3.2. Generation of Color Calibration Projection Light
4. Verification Experiment
4.1. Experimental Environment
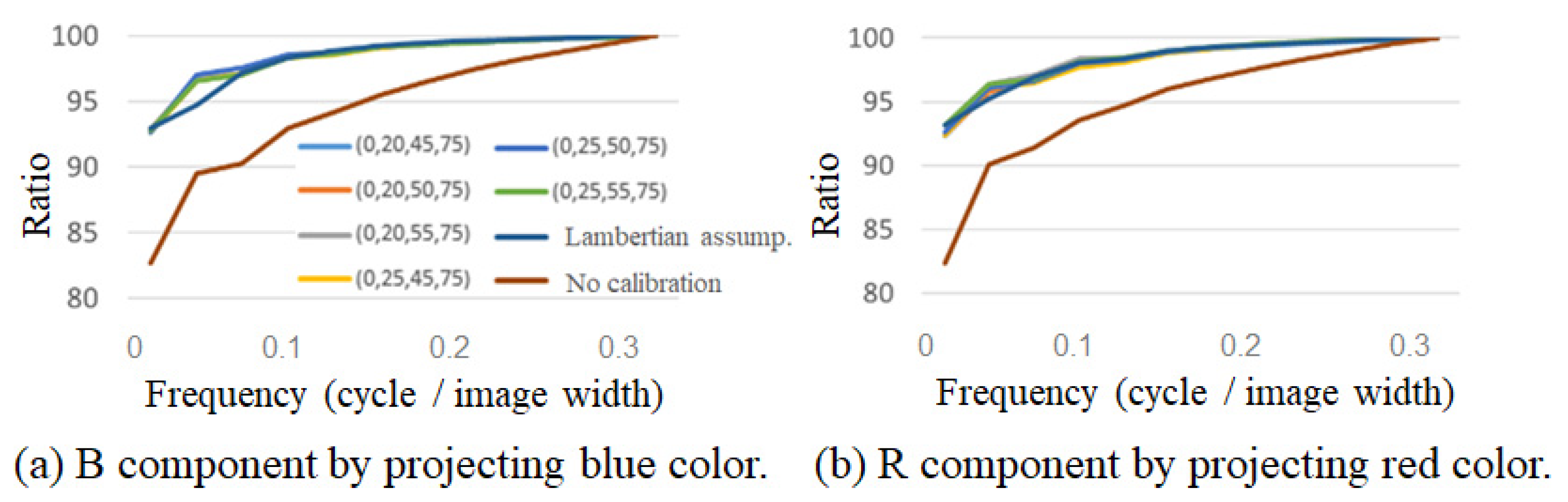
4.2. Color Reproduction Accuracy
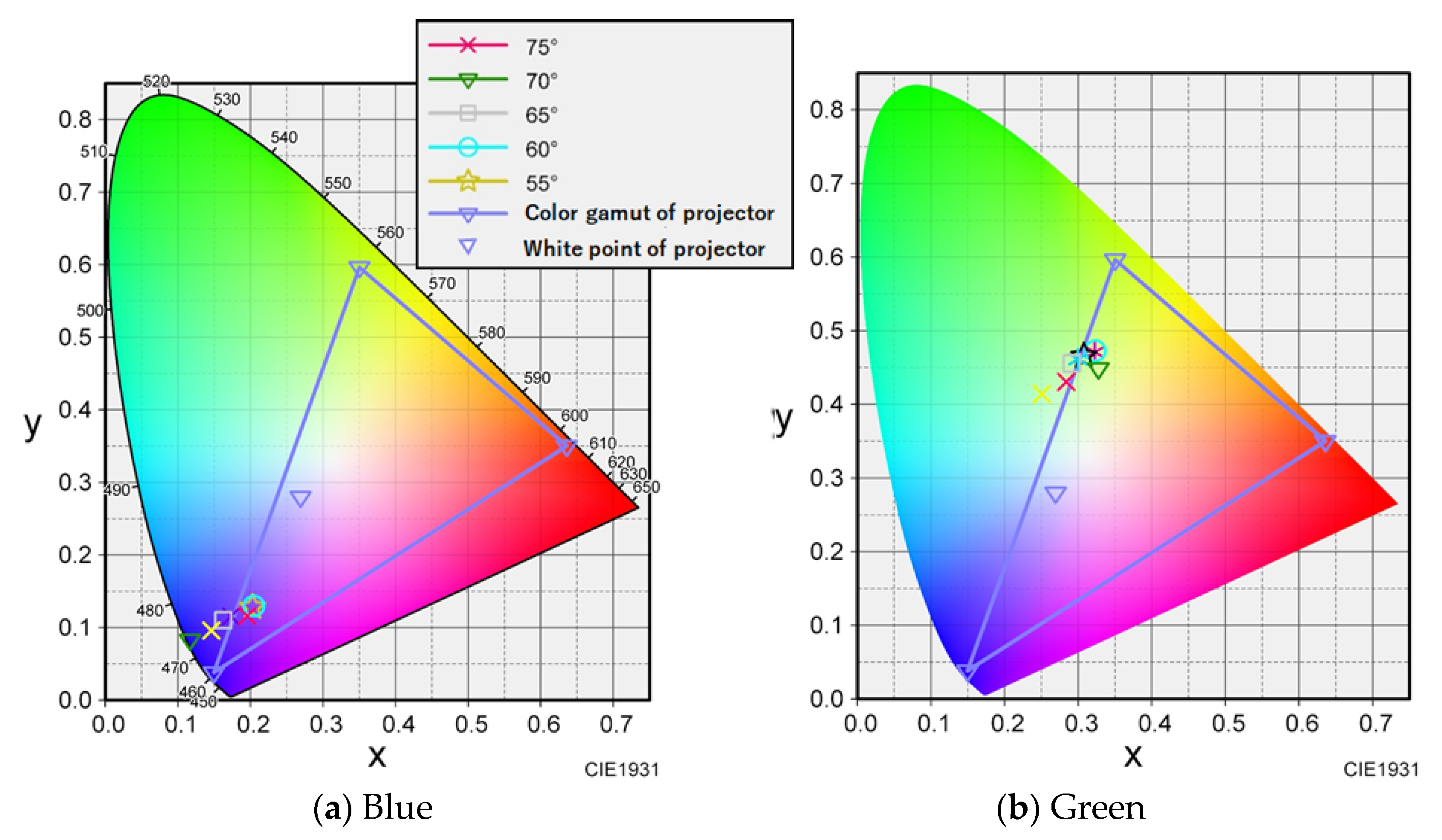
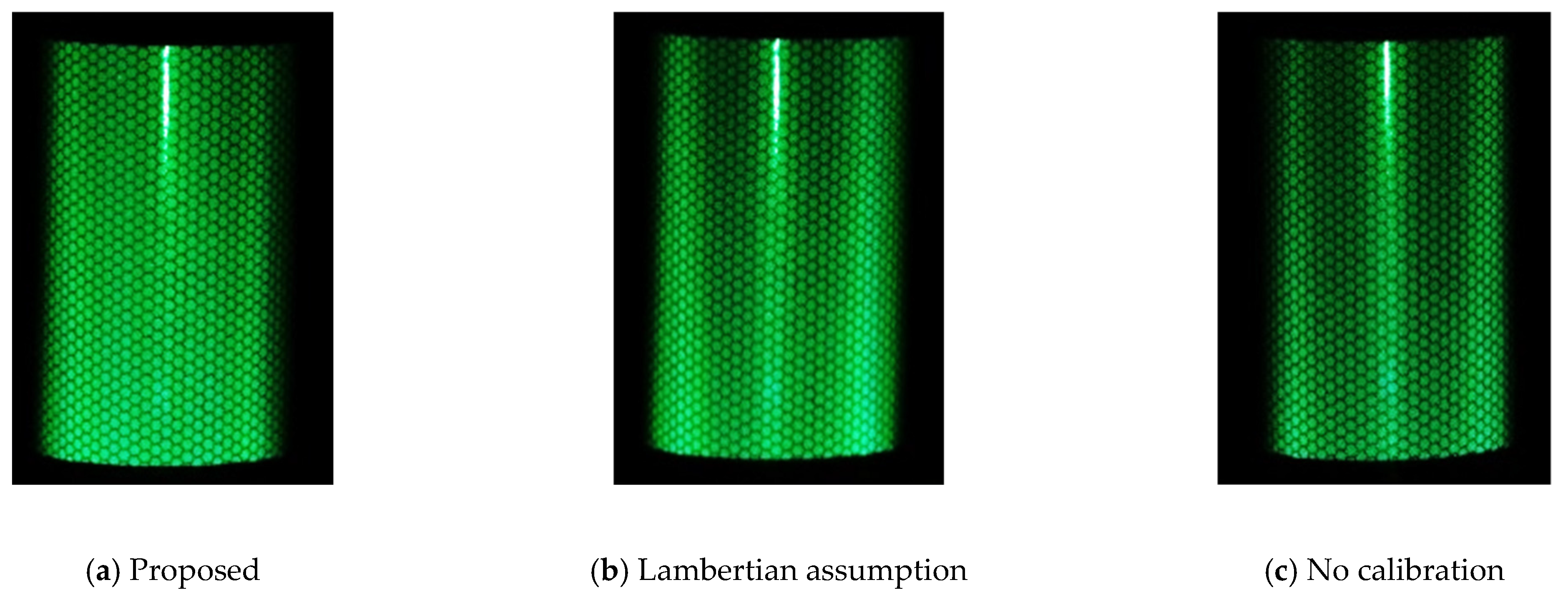
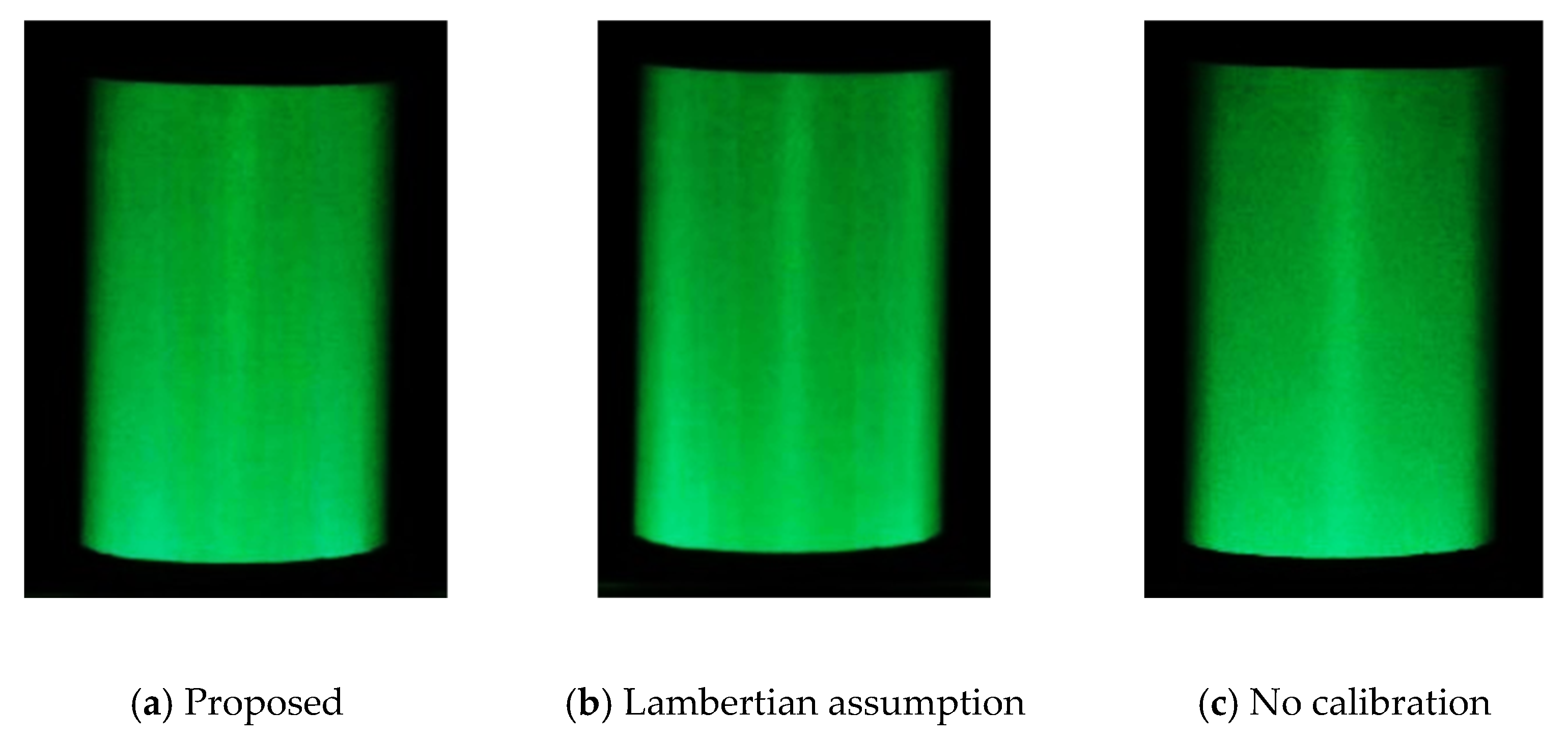
4.3. Verification for Changes in Incidence Angle
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Inami, M.; Kawakami, N.; Sekiguchi, D.; Yanagida, Y.; Maeda, T.; Tachi, S. Visuo-Haptic Display Using Head-Mounted Projector. In Proceedings of the IEEE Virtual Reality 2000 (Cat. No.00CB37048), New Brunswick, NJ, USA, 18–22 March 2000; pp. 233–240. [Google Scholar]
- Inami, M.; Kawakami, N.; Tachi, S. Optical camouflage using retro-reflective projection technology. In Proceedings of the Second IEEE and ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 10 October 2003. [Google Scholar]
- Tachi, S. Recent Advance in Telexistence—Retro-reflective Projection Technology based Mutual Telexistence. In Proceedings of the 13th International Symposium on Measurement and Control in Robotics—Toward Advanced Robots: Design, Sensors, Control and Applications, Madrid, Spain, 11–12 December 2003; Available online: https://tachilab.org/content/files/publication/ic/tachi200312ISMCR.pdf (accessed on 1 September 2022).
- Tachi, S. Telexistence and Retro-reflective Projection Technology (RPT). In Proceedings of the 5th Virtual Reality International Conference (VRIC2003), Tokyo, Japan, 13–18 May 2003. [Google Scholar]
- Tachi, S.; Kawasaki, N.; Inami, M.; Zaitsu, Y. Mutual Telexistence System using Retro-Reflective Projection Technology. Int. J. Hum. Robot. 2004, 1, 45–64. [Google Scholar] [CrossRef]
- Yoshida, T.; Jo, K.; Minamizawa, K.; Nii, H.; Kawakami, N.; Tachi, T. Transparent Cockpit: Visual Assistance System for Vehicle Using Retro-reflective Projection Technology. In Proceedings of the 2008 IEEE Virtual Reality Conference, Reno, NV, USA, 8–12 March 2008. [Google Scholar]
- Uema, Y.; Koizumi, N.; Chang, S.W.; Minamizawa, K.; Sugimoto, M.; Inami, M. Optical Camouflage III: Auto-Stereoscopic and Multiple-View Display System using Retro-Reflective Projection Technology. In Proceedings of the 2012 IEEE Virtual Reality Workshops (VRW), Costa Mesa, CA, USA, 4–8 March 2012. [Google Scholar]
- Bhardawaj, A.; Samyal, P.; Yadav, P.; Ratra, L. A Review of Retro Reflective Technology for Optical Camouflage Applications. Int. J. Inf. Comput. Technol. 2014, 4, 1057–1062. [Google Scholar]
- CIE. Retroreflection Definition and Measurement; CIE Technical Report; CIE: Vienna, Austria, 1982; p. 54. [Google Scholar]
- CIE Technical Committee 2-36 of Division 2. Retroreflection: Definition and Measurement; CIE Technical Report; CIE: Vienna, Austria, 2001; p. 54.2. [Google Scholar]
- Akaike, H. Information Theory and the Maximum Likelihood Principle; Springer: Berlin/Heidelberg, Germany, 1973. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Three Angles | Four Angles | Five Angles | Six Angles | |
|---|---|---|---|---|
| Open lens type | −90.39 | −118.78 | −104.44 | −90.41 |
| Encapsulated lens type | −49.69 | −57.52 | −53.27 | −43.27 |
| Red | Green | Blue | Cyan | Magenta | Yellow | White | |
|---|---|---|---|---|---|---|---|
| Open lens type | 2.87 | 2.89 | 1.53 | 0.71 | 1.98 | 2.21 | 1.82 |
| Encapsulated lens type | 2.06 | 1.77 | 2.13 | 2.17 | 2.59 | 2.00 | 2.24 |
| R | G | B | |
|---|---|---|---|
| (0, 20, 40, 55) | 29.69 | 28.72 | 27.40 |
| (0, 20, 45, 55) | 30.40 | 29.48 | 28.33 |
| (0, 20, 50, 55) | 32.97 | 31.80 | 28.52 |
| (0, 25, 40, 55) | 29.67 | 29.21 | 27.71 |
| (0, 25, 45, 55) | 31.44 | 30.33 | 28.41 |
| (0, 25, 50, 55) | 36.73 | 35.07 | 30.29 |
| Lambertian assumption | 34.09 | 34.25 | 30.49 |
| No calibration | 38.55 | 39.53 | 40.43 |
| R | G | B | |
|---|---|---|---|
| (0, 20, 40, 55) | 3.76 | 5.01 | 3.98 |
| (0, 20, 45, 55) | 3.24 | 4.79 | 3.65 |
| (0, 20, 50, 55) | 3.49 | 4.70 | 3.64 |
| (0, 25, 40, 55) | 3.46 | 4.90 | 3.73 |
| (0, 25, 45, 55) | 3.25 | 4.72 | 3.60 |
| (0, 25, 50, 55) | 3.52 | 4.94 | 3.85 |
| Lambertian assumption | 3.55 | 5.13 | 4.06 |
| No calibration | 4.28 | 7.15 | 5.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakamura, Y.; Horiuchi, T. Simple Color Calibration Method by Projection onto Retroreflective Materials. J. Imaging 2022, 8, 239. https://doi.org/10.3390/jimaging8090239
Nakamura Y, Horiuchi T. Simple Color Calibration Method by Projection onto Retroreflective Materials. Journal of Imaging. 2022; 8(9):239. https://doi.org/10.3390/jimaging8090239
Chicago/Turabian StyleNakamura, Yusuke, and Takahiko Horiuchi. 2022. "Simple Color Calibration Method by Projection onto Retroreflective Materials" Journal of Imaging 8, no. 9: 239. https://doi.org/10.3390/jimaging8090239
APA StyleNakamura, Y., & Horiuchi, T. (2022). Simple Color Calibration Method by Projection onto Retroreflective Materials. Journal of Imaging, 8(9), 239. https://doi.org/10.3390/jimaging8090239