




CLAIRE—Parallelized Diffeomorphic Image Registration for Large-Scale Biomedical Imaging Applications

 and
and
Abstract
:1. Introduction
1.1. Contributions
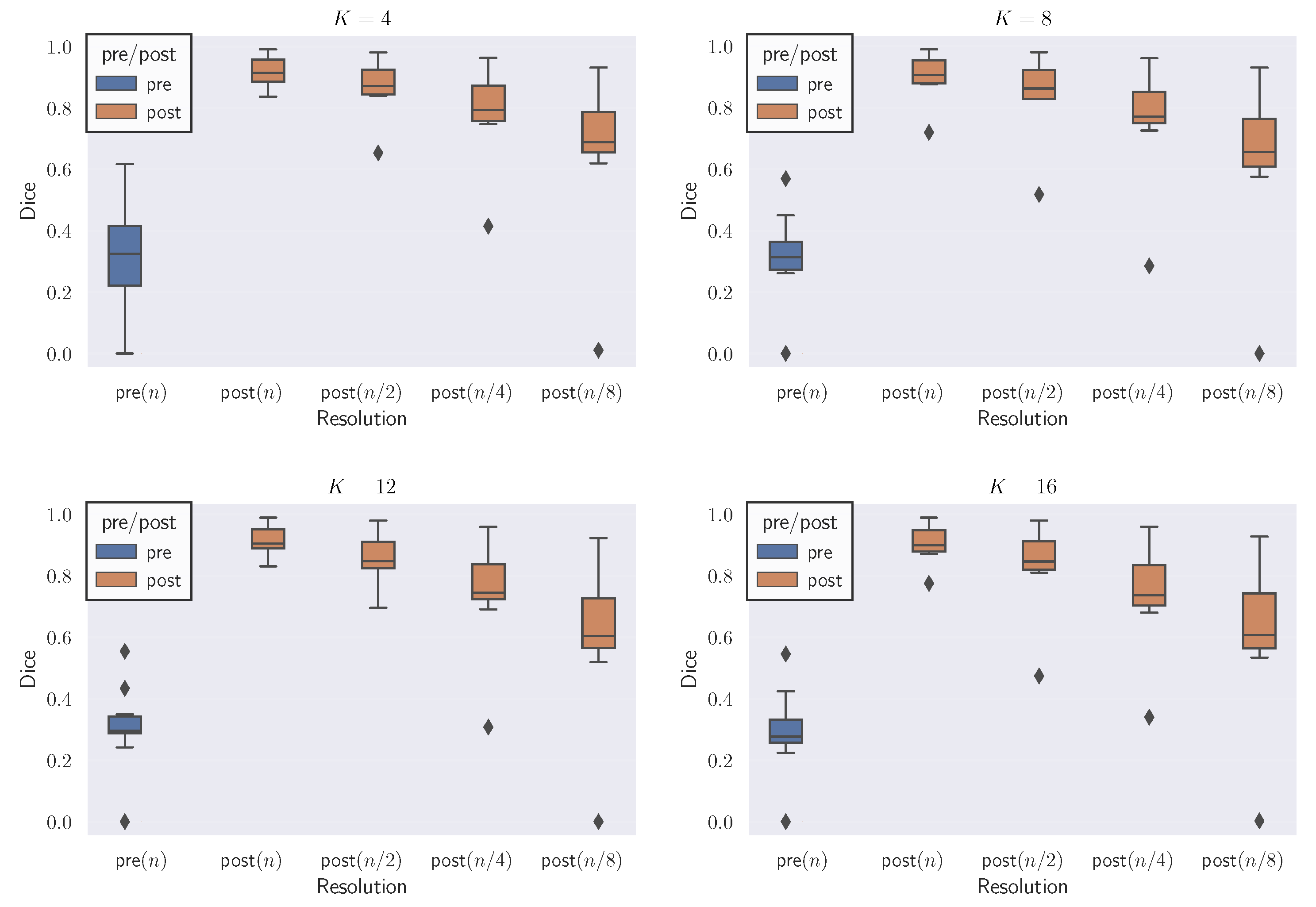
- We evaluate CLAIRE on high resolution synthetic and real image datasets. We demonstrate that image registration when performed at native high resolution results in higher accuracy (measured in terms of the Dice coefficient of the labeled structures in the images). We conduct experiments to show that downsampling the images and then registering them result in loss of registration accuracy.
- We design scalable image registration experiments to explore the effect of solver parameters—the number of time steps in the semi-Lagrangian scheme, and regularization parameters and —on the registration performance at different image resolutions.
- We present an extension of the regularization parameter continuation scheme first presented in [28] by searching for in addition to , thereby removing the need for selecting an additional resolution-dependent solver parameter.
- We study the performance of our scalable registration solver CLAIRE for applications in high-resolution mouse and human neuroimage registration. We perform image registration for two pairs of CLARITY mouse brain images at a resolution of voxels. To the best of our knowledge, images of this scale have not been registered before at full resolution in under 30 min.
1.2. Related Work
1.3. Outline
1.4. Limitations
2. Methods
2.1. Formulation
2.2. Discretization and Numerical Algorithms
2.2.1. Optimality Conditions & Reduced Space Approach
2.2.2. Discretization
2.2.3. Gauss–Newton–Krylov Solver
3. Computational Kernels and Parallel Algorithms
3.1. Compute Hardware and Libraries
3.2. Code Availability
3.3. Key Solver Parameters
- —regularization parameter for the velocity field . Large values for result in very smooth velocities and, thus, maps that are typically associated with a large final image mismatch. Smaller values of allow complex deformations but lead to a solution that might be close to being non-diffeomorphic due to discretization issues. From a user application point of view, we are interested in computing velocity fields, for which the Jacobian determinant, i.e., the determinant of the deformation gradient , is strictly positive for every image voxel. This guarantees a locally diffeomorphic transformation (subject to numerical accuracy). In [28,85], we determined the regularization parameter based on a binary search algorithm. The search is constrained by the bounds on . That is, we choose such that J is bounded from below by and bounded from above by 1/, where is a user-defined parameter. The binary search is expensive because we solve the inverse problem repeatedly. For each trial , we iterate until the convergence criteria for the Gauss–Newton–Krylov solver is met then use the previous velocity field as an initial guess for the next trial .
- —regularization parameter for the divergence of the velocity field . The choice of , along with , is equally critical. Small values can result in extreme values of J and make the deformations locally non-diffeomorphic. As discussed above, in our previous work [28], we do parameter continuation in and keep fixed. This is sub-optimal for two reasons: (i) Both and depend on the resolution, so keeping fixed for all resolutions can result in deformations with undesirable properties, and (ii) doing continuation in alone does not ensure we get close enough to the set Jacobian bounds. Therefore, adding continuation in , which also affects the Jacobian, is necessary.
- —lower bound for the determinant of the deformation gradient. The choice of this parameter is typically driven by dataset requirements, i.e., one has to decide how much volume change is acceptable. CLAIRE uses a default value of 0.25 [19]. Tighter bound on the Jacobian, i.e., close to unity, will result in large and values leading to simple deformations and sub-par registration quality. Relaxing the Jacobian bound in combination with our continuation schemes for and can result in very small regularization parameters and extremely complex deformations.
- —number of time steps in the semi-Lagrangian scheme. The semi-Lagrangian scheme is unconditionally stable and outperforms RK2 time integration schemes in terms of runtime for a given accuracy tolerance [30]. The choice of is based on the adjoint error, which is the error measured after solving Equation (3) forward and then backward in time. In [30], we conducted detailed experiments for 2D image registration and found, that even for problems of clinical resolution , (CFL = 10) did not cause issues in solver convergence. Increasing beyond a certain value will introduce additional discretization errors from the interpolation scheme.
- Resolution of . We use the same spatial discretization for as given for the input images. There exist image registration algorithms that approximate the registration deformation in a low-dimensional bandlimited space without sacrificing accuracy, resulting in dramatic savings in computational cost [15]. We have not explored this within the framework of CLAIRE. Note that [15] uses higher order regularization operators, which leads to smoother velocities compared to the ones CLAIRE produces, therefore enabling a representation on a coarser mesh. Moreover, CLAIRE uses a stationary velocity field, i.e., is constant in time. In our previous work [28], we have demonstrated that stationary and time-varying velocity fields yield similar registration accuracy for registration between two real medical images of different subjects. More precisely, we did not observe any practically significant quantitative differences in registration accuracy for a varying number of coefficient fields in the case of time-varying velocity fields. Using a stationary velocity field is significantly cheaper and has a smaller memory overhead from a computational cost perspective.
3.4. Parameter Identification
3.4.1. Resolution-Dependent Choice of the Interpolation Order and
3.4.2. Parameter Search Scheme for and
- (i)
- In the first part of the parameter search, we fix = () and search for . The registration problem is first solved for a large value of = so that we under-fit the data. In our experiments, we set . Subsequently, is reduced by one order of magnitude in every continuation step and the registration problem is solved again with the new . We repeat the reduction of until we breach the Jacobian bounds [, 1/]. When this happens, we do a binary search for between the last two values and terminate the binary search when the relative change in is less than 10% of the previous valid . In addition, we put a lower bound on . This lower bound is set purely to minimize computational cost. We denote the final value of as .
- (ii)
- In the second part of the search, we do a simple reduction search for by fixing = . Starting with a given value , we reduce by one order of magnitude and repeat solving the registration problem with and the respective value for until we reach . We put a lower bound on in order to minimize computational cost. We take the last valid value of , for which the Jacobian determinant was within bounds and denote it as . We fixed the value of for all experiments and resolutions. We determined this value empirically by running image registration on a couple of image pairs at resolution and (see Section 5.4 for the images) for different values of . We report these runs in Table A1 (see Appendix B).
3.4.3. Parameter Continuation Scheme for and
4. Materials
4.1. MUSE
4.2. NIREP
4.3. SYN
4.4. MRI250
4.5. CLARITY
5. Results and Discussion
5.1. Measures of Performance
5.1.1. Dice Score Coefficient D
5.1.2. Relative Residual r
5.1.3. Characteristic Parameters
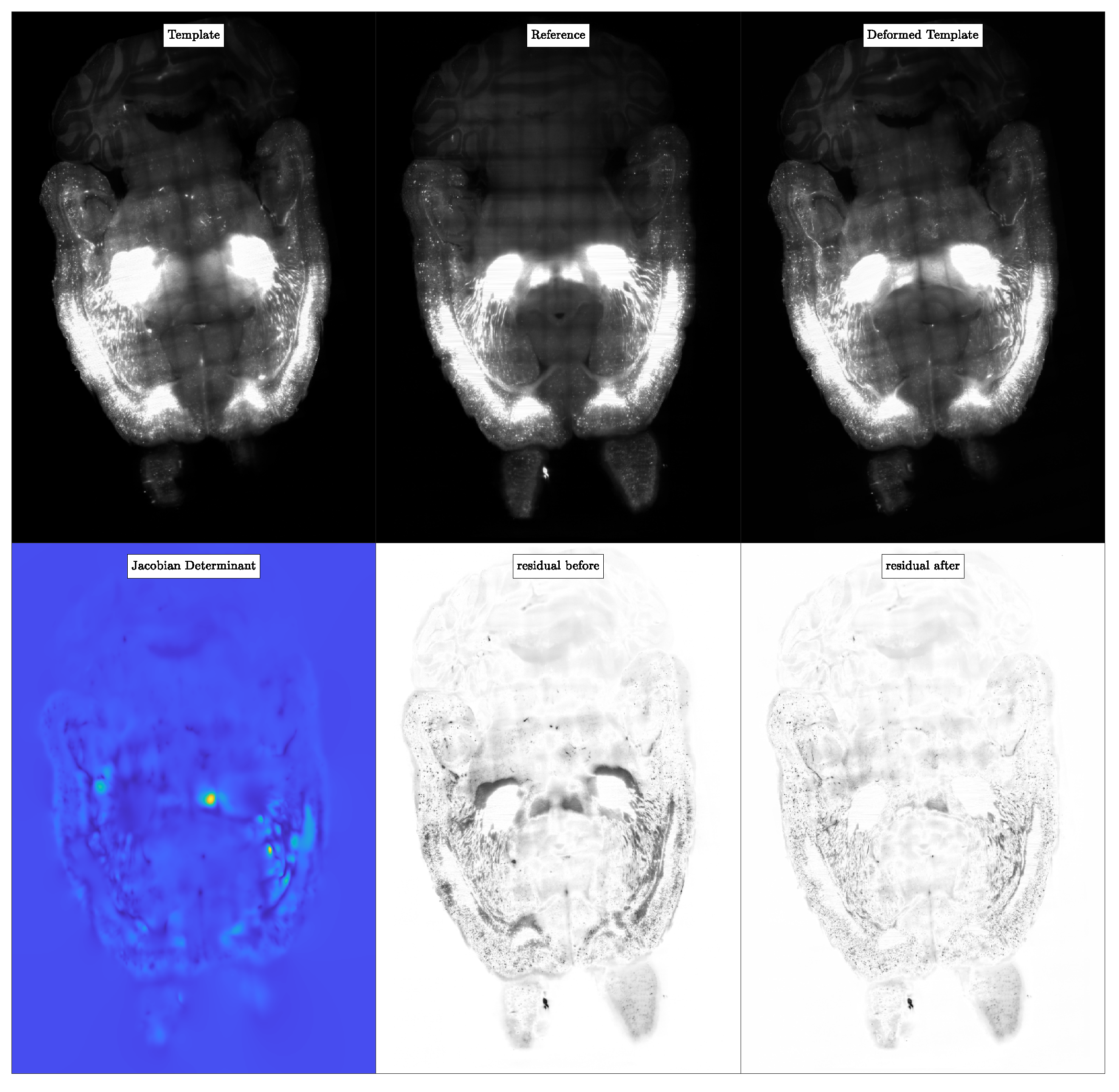
5.1.4. Visual Analysis
5.2. Experiment 1: Evaluation of the Parameter Search Scheme
5.2.1. Dataset
5.2.2. Procedure
5.2.3. Results
5.2.4. Observations
5.3. Experiment 2A: High Resolution Synthetic Data Registration
- They are noise-free, high contrast, and sharp, unlike real-world images.
- There is a scarcity of high resolution real image data because it is expensive and time-consuming to acquire. We can control the resolution of synthetic data because the images are created using analytically known functions.
- We can control the number of discrete image intensity levels, i.e., labels. Because these labels are available as ground truth, we can use them to precisely quantify registration accuracy through the Dice coefficient, avoiding inter- and intra-observer variabilities and other issues associated with establishing ground truth labels in real imaging data.
5.3.1. Dataset
5.3.2. Procedure
- We register the template image to the reference image at the base resolution n to get the velocity field . We transport using the velocity to get the deformed template image by solving Equation (3). Then, we compute the Dice score between and , which are discrete labels for and , respectively, using Equation (13).
- We downsample and using nearest neighbor interpolation to half the base resolution (for example, . Notice that we treat as a tuple. When we say , we mean ) and register the downsampled images to get the velocity . We upsample to the base resolution n using spectral prolongation and call it . We transport using by solving Equation (3) to get the deformed template image and then compute the Dice score for this new deformed template image.
- We repeat the procedure in step 2 for resolutions and and compute the corresponding Dice scores.
- changes with resolution: We use time steps for the coarsest resolution and double when we double the resolution in order to keep the CFL number fixed. All other solver parameters, except for the regularization parameters, are the same at each resolution.
- fixed with resolution: In order to study the effect of on the Dice score we keep fixed for each , instead of increasing proportionately to .
5.3.3. Results
5.3.4. Observations
5.4. Experiment 2B: High Resolution Real Data Registration
5.4.1. Datasets
5.4.2. Procedure
- Upsample the respective NIREP image from to using linear interpolation.
- Register MRI250 to the upsampled NIREP image using CLAIRE and transport (which corresponds to the MRI250 image) using the resulting velocity v and solving Equation (3) to obtain the deformed template image . We set the tolerance for the relative gradient norm to . We lower the tolerance compared to other runs to obtain a potentially more accurate registration result. We use the default regularization parameters and . Consequently, we do not perform a parameter search to estimate an optimal regularization parameter for this registration. We want to keep the downstream registration performance analysis, where we will use parameter search, oblivious to the process of generating the high-resolution reference image.
5.4.3. Results
5.4.4. Observations
5.5. Experiment 3: Registration of Mouse Brain CLARITY Images
5.5.1. Dataset
5.5.2. Procedure
5.5.3. Results
5.5.4. Observations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Deformable Registration Parameters for ANTs
| Listing A1. ANTs registration script. |
#!/bin/bash antsRegistration --dimensionality 3 --float 1 --output [$output_directory/,$output_directory/deformed-template.nii.gz] --interpolation Linear --winsorize-image-intensities [0.005,0.995] --use-histogram-matching 1 --initial-moving-transform [$moving_image,$template_image,1] --transform Rigid[0.1] --metric MI[$reference_image,$template_image,1,32,Regular,0.25] --convergence [1000x500x250x100,1e-6,10] --shrink-factors 8x4x2x1 --smoothing-sigmas 3x2x1x0vox --transform Affine[0.1] --metric MI[$reference_image,$template_image,1,32,Regular,0.25] --convergence [1000x500x250x100,1e-6,10] --shrink-factors 8x4x2x1 --smoothing-sigmas 3x2x1x0vox --transform SyN[0.1,3,0] --metric MeanSquares[$reference_image,$template_image,1] --convergence [100x70x50x20,1e-6,10] --shrink-factors 8x4x2x1 --smoothing-sigmas 3x2x1x0vox |
Appendix B. Determining βw,init

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Run | NIREP | r | Runtime (s) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Search | |||||||||
| #1 | na01 | 1 × 10 | N | 1.1 × 10 | 1.0 × 10 | 2.8 × 10 | 2.7 × 10 | 3.4 × 10 | 5.5 × 10 | 8.6 × 10 | 5.0 × 10 |
| #2 | N/4 | 2.3 × 10 | 1.0 × 10 | 3.5 × 10 | 2.8 × 10 | 4.6 × 10 | 7.9 × 10 | 3.5 × 10 | |||
| #3 | 1 × 10 | N | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 8.3 × 10 | 2.5 × 10 | 9.0 × 10 | 3.1 × 10 | ||
| #4 | N/4 | 1.1 × 10 | 1.0 × 10 | 2.3 × 10 | 8.2 × 10 | 4.5 × 10 | 8.0 × 10 | 3.6 × 10 | |||
| #5 | 1 × 10 | N | 2.0 × 10 | 1.0 × 10 | 5.2 × 10 | 1.6 × 10 | 3.0 × 10 | 8.6 × 10 | 2.1 × 10 | ||
| #6 | N/4 | 1.0 × 10 | 1.0 × 10 | 1.2 × 10 | 1.6 × 10 | 3.7 × 10 | 8.5 × 10 | 1.2 × 10 | |||
| #7 | 1 × 10 | N | 5.1 × 10 | 1.0 × 10 | 1.8 × 10 | 1.0 × 10 | 4.1 × 10 | 7.9 × 10 | 2.1 × 10 | ||
| #8 | N/4 | 6.6 × 10 | 1.0 × 10 | 1.1 × 10 | 1.8 × 10 | 4.0 × 10 | 8.2 × 10 | 7.7 × 10 | |||
| #9 | na02 | 1 × 10 | N | 1.1 × 10 | 1.0 × 10 | 2.1 × 10 | 2.7 × 10 | 3.4 × 10 | 5.4 × 10 | 8.4 × 10 | 5.7 × 10 |
| #10 | N/4 | 1.1 × 10 | 1.0 × 10 | 8.7 × 10 | 9.9 × 10 | 4.7 × 10 | 7.7 × 10 | 4.0 × 10 | |||
| #11 | 1 × 10 | N | 1.1 × 10 | 1.0 × 10 | 7.7 × 10 | 6.3 × 10 | 2.5 × 10 | 8.9 × 10 | 3.4 × 10 | ||
| #12 | N/4 | 1.1 × 10 | 1.0 × 10 | 8.1 × 10 | 1.1 × 10 | 4.6 × 10 | 7.7 × 10 | 3.9 × 10 | |||
| #13 | 1 × 10 | N | 4.1 × 10 | 1.0 × 10 | 1.4 × 10 | 2.0 × 10 | 3.8 × 10 | 8.0 × 10 | 2.4 × 10 | ||
| #14 | N/4 | 1.1 × 10 | 1.0 × 10 | 8.2 × 10 | 1.2 × 10 | 4.1 × 10 | 8.1 × 10 | 1.4 × 10 | |||
| #15 | 1 × 10 | N | 4.0 × 10 | 1.0 × 10 | 1.2 × 10 | 1.8 × 10 | 3.8 × 10 | 8.0 × 10 | 2.5 × 10 | ||
| #16 | N/4 | 1.0 × 10 | 1.0 × 10 | 8.8 × 10 | 2.0 × 10 | 3.8 × 10 | 8.3 × 10 | 1.4 × 10 | |||
References
- Hajnal, J.V.; Hill, D.L.G.; Hawkes, D.J. (Eds.) Medical Image Registration; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Sotiras, A.; Davatzikos, C.; Paragios, N. Deformable medical image registration: A survey. IEEE Trans. Med. Imaging 2013, 32, 1153–1190. [Google Scholar] [CrossRef] [PubMed]
- Modersitzki, J. Numerical Methods for Image Registration; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Modersitzki, J. FLIRT with rigidity—Image registration with a local non-rigidity penalty. Int. J. Comput. Vis. 2008, 76, 153–163. [Google Scholar] [CrossRef]
- Beg, M.F.; Miller, M.I.; Trouvé, A.; Younes, L. Computing large deformation metric mappings via geodesic flows of diffeomorphisms. Int. J. Comput. Vis. 2005, 61, 139–157. [Google Scholar] [CrossRef]
- Trouvé, A. Diffeomorphism groups and pattern matching in image analysis. Int. J. Comput. Vis. 1998, 28, 213–221. [Google Scholar] [CrossRef]
- Younes, L. Shapes and Diffeomorphisms; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Fischer, B.; Modersitzki, J. Ill-posed medicine—An introduction to image registration. Inverse Probl. 2008, 24, 1–16. [Google Scholar] [CrossRef]
- Vercauteren, T.; Pennec, X.; Perchant, A.; Ayache, N. Diffeomorphic demons: Efficient non-parametric image registration. NeuroImage 2009, 45, S61–S72. [Google Scholar] [CrossRef]
- Vercauteren, T.; Pennec, X.; Perchant, A.; Ayache, N. Diffeomorphic Demons using ITK’s Finite Difference Solver Hierarchy. Insight J. 2007. Available online: http://hdl.handle.net/1926/510 (accessed on 5 January 2022).
- Avants, B.B.; Tustison, N.J.; Stauffer, M.; Song, G.; Wu, B.; Gee, J.C. The Insight ToolKit Image Registration Framework. Front. Neuroinformatics 2014, 8, 44. [Google Scholar] [CrossRef]
- Yang, X.; Kwitt, R.; Styner, M.; Niethammer, M. Quicksilver: Fast predictive image registration—A deep learning approach. NeuroImage 2017, 158, 378–396. [Google Scholar] [CrossRef]
- Krebs, J.; Mansi, T.; Mailhé, B.; Ayache, N.; Delingette, H. Unsupervised probabilistic deformation modeling for robust diffeomorphic registration. In Proceedings of the International Workshop on Deep Learning in Medical Image Analysis 2018, Granada, Spain, 20 September 2018; pp. 101–109. [Google Scholar]
- Gu, X.; Pan, H.; Liang, Y.; Castillo, R.; Yang, D.; Choi, D.; Castillo, E.; Majumdar, A.; Guerrero, T.; Jiang, S.B. Implementation and evaluation of various demons deformable image registration algorithms on a GPU. Phys. Med. Biol. 2009, 55, 207–219. [Google Scholar] [CrossRef]
- Zhang, M.; Fletcher, P.T. Fast Diffeomorphic Image Registration via Fourier-Approximated Lie Algebras. Int. J. Comput. Vis. 2019, 127, 61–73. [Google Scholar] [CrossRef]
- Grzech, D.; Folgoc, L.; Heinrich, M.P.; Khanal, B.; Moll, J.; Schnabel, J.A.; Glocker, B.; Kainz, B. FastReg: Fast Non-Rigid Registration via Accelerated Optimisation on the Manifold of Diffeomorphisms. arXiv 2019, arXiv:1903.01905. [Google Scholar]
- Mang, A.; Gholami, A.; Biros, G. Distributed-memory large-deformation diffeomorphic 3D image registration. In Proceedings of the ACM/IEEE Conference on Supercomputing 2016, Salt Lake City, UT, USA, 13–18 November 2016. [Google Scholar]
- Gholami, A.; Mang, A.; Biros, G. An inverse problem formulation for parameter estimation of a reaction-diffusion model of low grade gliomas. J. Math. Biol. 2016, 72, 409–433. [Google Scholar] [CrossRef] [PubMed]
- Mang, A.; Gholami, A.; Davatzikos, C.; Biros, G. CLAIRE: A distributed-memory solver for constrained large deformation diffeomorphic image registration. SIAM J. Sci. Comput. 2019, 41, C548–C584. [Google Scholar] [CrossRef] [PubMed]
- Brunn, M.; Himthani, N.; Biros, G.; Mehl, M.; Mang, A. Fast GPU 3D Diffeomorphic Image Registration. J. Parallel Distrib. Comput. 2021, 149, 149–162. [Google Scholar] [CrossRef] [PubMed]
- Brunn, M.; Himthani, N.; Biros, G.; Mehl, M.; Mang, A. CLAIRE: Constrained Large Deformation Diffeomorphic Image Registration on Parallel Computing Architectures. J. Open Source Softw. 2021, 6, 3038. [Google Scholar] [CrossRef]
- Brunn, M.; Himthani, N.; Biros, G.; Mehl, M.; Mang, A. Multi-Node Multi-GPU Diffeomorphic Image Registration for Large-Scale Imaging Problems. In Proceedings of the SC20: International Conference for High Performance Computing, Networking, Storage and Analysis, Virtual, 16–19 November 2020; pp. 1–17. [Google Scholar] [CrossRef]
- Chung, K.; Wallace, J.; Kim, S.Y.; Kalyanasundaram, S.; Andalman, A.S.; Davidson, T.J.; Mirzabekov, J.J.; Zalocusky, K.A.; Mattis, J.; Denisin, A.K.; et al. Structural and molecular interrogation of intact biological systems. Nature 2013, 497, 332–337. [Google Scholar] [CrossRef]
- Kim, S.Y.; Chung, K.; Deisseroth, K. Light microscopy mapping of connections in the intact brain. Trends Cogn. Sci. 2013, 17, 596–599. [Google Scholar] [CrossRef]
- Kutten, K.S.; Charon, N.; Miller, M.I.; Ratnanather, J.T.; Deisseroth, K.; Ye, L.; Vogelstein, J.T. A diffeomorphic approach to multimodal registration with mutual information: Applications to CLARITY mouse brain images. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention, Quebec City, QC, Canada, 11–13 September 2017; pp. 275–282. [Google Scholar]
- Tomer, R.; Ye, L.; Hsueh, B.; Deisseroth, K. Advanced CLARITY for rapid and high-resolution imaging of intact tissues. Nat. Protoc. 2014, 9, 1682–1697. [Google Scholar] [CrossRef]
- Vogelstein, J.T.; Perlman, E.; Falk, B.; Baden, A.; Gray Roncal, W.; Chandrashekhar, V.; Collman, F.; Seshamani, S.; Patsolic, J.L.; Lillaney, K.; et al. A community-developed open-source computational ecosystem for big neuro data. Nat. Methods 2018, 15, 846–847. [Google Scholar] [CrossRef]
- Mang, A.; Biros, G. An inexact Newton—Krylov algorithm for constrained diffeomorphic image registration. SIAM J. Imaging Sci. 2015, 8, 1030–1069. [Google Scholar] [CrossRef] [Green Version]
- Mang, A.; Biros, G. Constrained H1-regularization schemes for diffeomorphic image registration. SIAM J. Imaging Sci. 2016, 9, 1154–1194. [Google Scholar] [CrossRef] [PubMed]
- Mang, A.; Biros, G. A Semi-Lagrangian two-level preconditioned Newton–Krylov solver for constrained diffeomorphic image registration. SIAM J. Sci. Comput. 2017, 39, B1064–B1101. [Google Scholar] [CrossRef] [PubMed]
- Mang, A.; Gholami, A.; Davatzikos, C.; Biros, G. PDE-constrained optimization in medical image analysis. Optim. Eng. 2018, 19, 765–812. [Google Scholar] [CrossRef]
- Gholami, A.; Mang, A.; Scheufele, K.; Davatzikos, C.; Mehl, M.; Biros, G. A Framework for Scalable Biophysics-based Image Analysis. In Proceedings of the ACM/IEEE Conference on Supercomputing, Denver, CO, USA, 12–17 November 2017; pp. 1–13. [Google Scholar]
- Mang, A.; Ruthotto, L. A Lagrangian Gauss–Newton–Krylov solver for mass- and intensity-preserving diffeomorphic image registration. SIAM J. Sci. Comput. 2017, 39, B860–B885. [Google Scholar] [CrossRef]
- Mang, A.; Biros, G. Constrained Large Deformation Diffeomorphic Image Registration (CLAIRE). 2019. Available online: https://andreasmang.github.io/claire (accessed on 5 January 2022).
- Mang, A.; Bakas, S.; Subramanian, S.; Davatzikos, C.; Biros, G. Integrated biophysical modeling and image analysis: Application to neuro-oncology. Annu. Rev. Biomed. Eng. 2020, 22, 309–341. [Google Scholar] [CrossRef]
- Scheufele, K.; Mang, A.; Gholami, A.; Davatzikos, C.; Biros, G.; Mehl, M. Coupling brain-tumor biophysical models and diffeomorphic image registration. Comput. Methods Appl. Mech. Eng. 2019, 347, 533–567. [Google Scholar] [CrossRef]
- Scheufele, K.; Subramanian, S.; Mang, A.; Biros, G.; Mehl, M. Image-driven biophysical tumor growth model calibration. SIAM J. Sci. Comput. 2020, 42, B549–B580. [Google Scholar] [CrossRef]
- Avants, B.B.; Tustison, N.J.; Song, G.; Cook, P.A.; Klein, A.; Gee, J.C. A reproducible evaluation of ANTs similarity metric performance in brain image registration. NeuroImage 2011, 54, 2033–2044. [Google Scholar] [CrossRef]
- Avants, B.B.; Epstein, C.L.; Brossman, M.; Gee, J.C. Symmetric diffeomorphic image registration with cross-correlation: Evaluating automated labeling of elderly and neurodegenerative brain. Med. Image Anal. 2008, 12, 26–41. [Google Scholar] [CrossRef]
- Avants, B.B.; Tustison, N.J.; Johnson, H.J. ANTs. Available online: http://stnava.github.io/ANTs (accessed on 3 September 2020).
- Ashburner, J. A fast diffeomorphic image registration algorithm. NeuroImage 2007, 38, 95–113. [Google Scholar] [CrossRef]
- Bone, A.; Colliot, O.; Durrleman, S. Learning distributions of shape trajectories from longitudinal datasets: A hierarchical model on a manifold of diffeomorphisms. arXiv 2019, arXiv:1803.10119. [Google Scholar]
- Bone, A.; Louis, M.; Martin, B.; Durrleman, S. Deformetrica 4: An open-source software for statistical shape analysis. In Proceedings of the International Workshop on Shape in Medical Imaging, Granada, Spain, 20 September 2018; pp. 3–13. [Google Scholar]
- Fishbaugh, J.; Durrleman, S.; Prastawa, M.; Gerig, G. Geodesic shape regression with multiple geometries and sparse parameters. Med. Image Anal. 2017, 39, 1–17. [Google Scholar] [CrossRef]
- Durrleman, S.; Brone, A.; Louis, M.; Martin, B.; Gori, P.; Routier, A.; Bacci, M.; Fouquier, A.; Charlier, B.; Glaunes, J.; et al. Deformetrica. Available online: http://www.deformetrica.org (accessed on 3 September 2020).
- Center for Imaging Science, Johns Hopkins University. LDDMM Suite. Available online: http://cis.jhu.edu/software (accessed on 5 January 2022).
- Neurodata. ARDENT. Available online: https://ardent.neurodata.io (accessed on 5 January 2022).
- Insight Software Consortium. ITKNDReg. Available online: https://github.com/InsightSoftwareConsortium/ITKNDReg (accessed on 5 January 2022).
- Preston, J.S. Python for Computational Anatomy. Available online: https://bitbucket.org/scicompanat/pyca (accessed on 5 January 2022).
- Fluck, O.; Vetter, C.; Wein, W.; Kamen, A.; Preim, B.; Westermann, R. A survey of medical image registration on graphics hardware. Comput. Methods Programs Biomed. 2011, 104, e45–e57. [Google Scholar] [CrossRef] [PubMed]
- Shams, R.; Sadeghi, P.; Kennedy, R.A.; Hartley, R.I. A survey of medical image registration on multicore and the GPU. Signal Process. Mag. 2010, 27, 50–60. [Google Scholar] [CrossRef]
- Eklund, A.; Dufort, P.; Forsberg, D.; LaConte, S.M. Medical image processing on the GPU–Past, present and future. Med. Image Anal. 2013, 17, 1073–1094. [Google Scholar] [CrossRef]
- Budelmann, D.; Koenig, L.; Papenberg, N.; Lellmann, J. Fully-deformable 3D image registration in two seconds. In Proceedings of the Bildverarbeitung für die Medizin, Lübeck, Germany, 17–19 March 2019; pp. 302–307. [Google Scholar]
- Courty, N.; Hellier, P. Accelerating 3D non-rigid registration using graphics hardware. Int. J. Image Graph. 2008, 8, 81–98. [Google Scholar] [CrossRef]
- Durrleman, S.; Prastawa, M.; Charon, N.; Korenberg, J.R.; Joshi, S.; Gerig, G.; Trouve, A. Morphometry of anatomical shape complexes with dense deformations and sparse parameters. NeuroImage 2014, 101, 35–49. [Google Scholar] [CrossRef]
- Ellingwood, N.D.; Yin, Y.; Smith, M.; Lin, C.L. Efficient methods for implementation of multi-level nonrigid mass-preserving image registration on GPUs and multi-threaded CPUs. Comput. Methods Programs Biomed. 2016, 127, 290–300. [Google Scholar] [CrossRef]
- Ha, L.K.; Krüger, J.; Fletcher, P.T.; Joshi, S.; Silva, C.T. Fast parallel unbiased diffeomorphic atlas construction on multi-graphics processing units. In Proceedings of the Eurographics Conference on Parallel Grphics and Visualization, Munich, Germany, 29–30 March 2009; pp. 41–48. [Google Scholar]
- Ha, L.; Krüger, J.; Joshi, S.; Silva, C.T. Multiscale unbiased diffeomorphic atlas construction on multi-GPUs. In CPU Computing Gems Emerald Edition; Elsevier Inc.: Amsterdam, The Netherlands, 2011; Chapter 48; pp. 771–791. [Google Scholar]
- Joshi, S.; Davis, B.; Jornier, M.; Gerig, G. Unbiased diffeomorphic atlas construction for computational anatomy. NeuroImage 2005, 23, S151–S160. [Google Scholar] [CrossRef]
- Koenig, L.; Ruehaak, J.; Derksen, A.; Lellmann, J. A matrix-free approach to parallel and memory-efficient deformable image registration. SIAM J. Sci. Comput. 2018, 40, B858–B888. [Google Scholar] [CrossRef]
- Modat, M.; Ridgway, G.R.; Taylor, Z.A.; Lehmann, M.; Barnes, J.; Hawkes, D.J.; Fox, N.C.; Ourselin, S. Fast free-form deformation using graphics processing units. Comput. Methods Programs Biomed. 2010, 98, 278–284. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sommer, S. Accelerating multi-scale flows for LDDKBM diffeomorphic registration. In Proceedings of the Proc IEEE International Conference on Computer Visions Workshops, Barcelona, Spain, 6–13 November 2011; pp. 499–505. [Google Scholar]
- Shackleford, J.; Kandasamy, N.; Sharp, G. On developing B-spline registration algorithms for multi-core processors. Phys. Med. Biol. 2010, 55, 6329–6351. [Google Scholar] [CrossRef]
- Shamonin, D.P.; Bron, E.E.; Lelieveldt, B.P.F.; Smits, M.; Klein, S.; Staring, M. Fast parallel image registration on CPU and GPU for diagnostic classification of Alzheimer’s disease. Front. Neuroinformatics 2014, 7, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Valero-Lara, P. A GPU approach for accelerating 3D deformable registration (DARTEL) on brain biomedical images. In Proceedings of the European MPI Users’ Group Meeting, Madrid, Spain, 15–18 September 2013. [Google Scholar]
- Valero-Lara, P. Multi-GPU acceleration of DARTEL (early detection of Alzheimer). In Proceedings of the IEEE International Conference on Cluster Computing, Madrid, Spain, 22–26 September 2014; pp. 346–354. [Google Scholar]
- Nazib, A.; Galloway, J.; Fookes, C.; Perrin, D. Performance of Registration Tools on High-Resolution 3D Brain Images. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 566–569. [Google Scholar] [CrossRef]
- Susaki, E.A.; Tainaka, K.; Perrin, D.; Yukinaga, H.; Kuno, A.; Ueda, H.R. Advanced CUBIC Protocols for Whole-Brain and Whole-Body Clearing and Imaging. Nat. Protoc. 2015, 10, 1709–1727. [Google Scholar] [CrossRef]
- Klein, S.; Staring, M.; Murphy, K.; Viergever, M.A.; Pluim, J.P.W. ELASTIX: A tollbox for intensity-based medical image registration. IEEE Trans. Med. Imaging 2010, 29, 196–205. [Google Scholar] [CrossRef]
- Niedworok, C.J.; Brown, A.P.Y.; Jorge Cardoso, M.; Osten, P.; Ourselin, S.; Modat, M.; Margrie, T.W. aMAP Is a Validated Pipeline for Registration and Segmentation of High-Resolution Mouse Brain Data. Nat. Commun. 2016, 7, 11879. [Google Scholar] [CrossRef]
- Kuan, L.; Li, Y.; Lau, C.; Feng, D.; Bernard, A.; Sunkin, S.M.; Zeng, H.; Dang, C.; Hawrylycz, M.; Ng, L. Neuroinformatics of the Allen Mouse Brain Connectivity Atlas. Methods 2015, 73, 4–17. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, M.; Bossa, M.N.; Olmos, S. Registration of anatomical images using paths of diffeomorphisms parameterized with stationary vector field flows. Int. J. Comput. Vis. 2009, 85, 291–306. [Google Scholar] [CrossRef]
- Lorenzi, M.; Pennec, X. Geodesics, parallel transport and one-parameter subgroups for diffeomorphic image registration. Int. J. Comput. Vis. 2013, 105, 111–127. [Google Scholar] [CrossRef]
- Gholami, A.; Biros, G. AccFFT. 2017. Available online: https://github.com/amirgholami/accfft (accessed on 3 January 2017).
- Gholami, A.; Biros, G. AccFFT Home Page. 2017. Available online: http://www.accfft.org (accessed on 3 January 2017).
- Balay, S.; Gropp, W.D.; McInnes, L.C.; Smith, B.F. Efficient Management of Parallelism in Object Oriented Numerical Software Libraries. In Modern Software Tools in Scientific Computing; Arge, E., Bruaset, A.M., Langtangen, H.P., Eds.; Birkhäuser Press: Boston, MA, USA, 1997; pp. 163–202. [Google Scholar]
- Balay, S.; Abhyankar, S.; Adams, M.F.; Brown, J.; Brune, P.; Buschelman, K.; Dalcin, L.; Dener, A.; Eijkhout, V.; Gropp, W.D.; et al. PETSc and TAO Webpage (PETSc Version 3.12.4). Available online: https://www.mcs.anl.gov/petsc (accessed on 4 February 2020).
- NVIDIA. CUDA Toolkit (Version 10.1). Available online: https://developer.nvidia.com/cuda-downloads (accessed on 27 February 2019).
- Hoberock, J.; Bell, N. Thrust. Thrust, the Cuda c++ Template Library. 2010. Available online: https://docs.nvidia.com/cuda/thrust/index.html (accessed on 27 February 2019).
- Nvidia. CUDA CUFFT Library. Available online: https://docs.nvidia.com/cuda/cufft/index.html (accessed on 27 February 2019).
- Fissell, K.; Reynolds, R. Niftilib (Version 2.2.0). 2020. Available online: http://niftilib.sourceforge.net (accessed on 5 January 2020).
- Latham, R.; Zingale, M.; Thakur, R.; Gropp, W.; Gallagher, B.; Liao, W.; Siegel, A.; Ross, R.; Choudhary, A.; Li, J. Parallel netCDF: A High-Performance Scientific I/O Interface. In Proceedings of the SC Conference, Phoenix, AZ, USA, 15–21 November 2003; IEEE Computer Society: Los Alamitos, CA, USA, 2003; p. 39. [Google Scholar] [CrossRef]
- IBM Spectrum MPI (Version 10.3.0). Available online: https://www.ibm.com/products/spectrum-mpi (accessed on 5 January 2022).
- IBM. IBM XL C/C++ (Version 16.1.1). Available online: https://www.ibm.com/us-en/marketplace/xl-cpp-linux-compiler-power (accessed on 5 January 2022).
- Haber, E.; Oldenburg, D. A GCV Based Method for Nonlinear Ill-Posed Problems. Comput. Geosci. 2000, 4, 41–63. [Google Scholar] [CrossRef]
- Neuromorphometrics. Available online: http://www.neuromorphometrics.com (accessed on 5 January 2022).
- Doshi, J.; Erus, G.; Ou, Y.; Resnick, S.M.; Gur, R.C.; Gur, R.E.; Satterthwaite, T.D.; Furth, S.; Davatzikos, C. MUSE: MUlti-atlas Region Segmentation Utilizing Ensembles of Registration Algorithms and Parameters, and Locally Optimal Atlas Selection. NeuroImage 2016, 127, 186–195. [Google Scholar] [CrossRef] [PubMed]
- Christensen, G.E.; Geng, X.; Kuhl, J.G.; Bruss, J.; Grabowski, T.J.; Pirwani, I.A.; Vannier, M.W.; Allen, J.S.; Damasio, H. Introduction to the non-rigid image registration evaluation project. In Proceedings of the Biomedical Image Registration 2006, Utrecht, The Netherlands, 9–11 July 2006; pp. 128–135. [Google Scholar]
- Lüsebrink, F.; Sciarra, A.; Mattern, H.; Yakupov, R.; Speck, O. T1-Weighted in Vivo Human Whole Brain MRI Dataset with an Ultrahigh Isotropic Resolution of 250 μm. Sci. Data 2017, 4, 170032. [Google Scholar] [CrossRef] [PubMed]
- Data from: T1-Weighted In Vivo Human Whole Brain MRI Dataset with an Ultrahigh Isotropic Resolution of 250 μm. Available online: https://datadryad.org/stash/dataset/doi:10.5061/dryad.38s74 (accessed on 5 January 2022).
- Yushkevich, P.A.; Piven, J.; Cody Hazlett, H.; Gimpel Smith, R.; Ho, S.; Gee, J.C.; Gerig, G. User-Guided 3D Active Contour Segmentation of Anatomical Structures: Significantly Improved Efficiency and Reliability. Neuroimage 2006, 31, 1116–1128. [Google Scholar] [CrossRef]
- Zhang, Y.; Brady, M.; Smith, S. Segmentation of brain MR images through a hidden Markov random field model and the expectation-maximization algorithm. IEEE Trans. Med. Imaging 2001, 20, 45–57. [Google Scholar] [CrossRef] [PubMed]
- Woolrich, M.W.; Jbabdi, S.; Patenaude, B.; Chappell, M.; Makni, S.; Behrens, T.; Beckmann, C.; Jenkinson, M.; Smith, S.M. Bayesian analysis of neuroimaging data in FSL. Neuroimage 2009, 45, S173–S186. [Google Scholar] [CrossRef]
- Smith, S.M.; Jenkinson, M.; Woolrich, M.W.; Beckmann, C.F.; Behrens, T.E.; Johansen-Berg, H.; Bannister, P.R.; De Luca, M.; Drobnjak, I.; Flitney, D.E.; et al. Advances in functional and structural MR image analysis and implementation as FSL. Neuroimage 2004, 23, S208–S219. [Google Scholar] [CrossRef]
- Jenkinson, M.; Beckmann, C.F.; Behrens, T.E.; Woolrich, M.W.; Smith, S.M. FSL. Neuroimage 2012, 62, 782–790. [Google Scholar] [CrossRef]
- Chung, K.; Deisseroth, K. CLARITY for mapping the nervous system. Nat. Methods 2013, 10, 508–513. [Google Scholar] [CrossRef]
- Kutten, K.S.; Vogelstein, J.T.; Charon, N.; Ye, L.; Deisseroth, K.; Miller, M.I. Deformably Registering and Annotating Whole CLARITY Brains to an Atlas via Masked LDDMM. In Proceedings of the Optics, Photonics and Digital Technologies for Imaging Applications IV, Brussels, Belgium, 4 March 2016; Volume 9896, pp. 282–290. [Google Scholar] [CrossRef] [Green Version]
- Kutten, K.S.; Charon, N.; Miller, M.I.; Ratnanather, J.T.; Matelsky, J.; Baden, A.D.; Lillaney, K.; Deisseroth, K.; Ye, L.; Vogelstein, J.T. A Large Deformation Diffeomorphic Approach to Registration of CLARITY Images via Mutual Information. arXiv 2017, arXiv:1612.00356. [Google Scholar]
- Chandrashekhar, V.; Crow, A.; Bogelstein, J.; Deisseroth, K. Neurodata Claritomes. Available online: https://neurodata.io/project/claritomes (accessed on 5 January 2022).








| Symbol | Description |
|---|---|
| spatial domain; with boundary | |
| spatial coordinate; | |
| t | (pseudo-)time variable; |
| reference image (fixed image) | |
| template image (moving image) | |
| stationary velocity field | |
| (diffeomorphic) deformation map | |
| state variable (transported intensities of ) | |
| adjoint variable | |
| regularization operator | |
| regularization parameter for | |
| regularization parameter for | |
| deformation gradient | |
| J | determinant of deformation gradient (Jacobian determinant) |
| number of time steps in PDE solver | |
| CFL | Courant–Friedrichs–Lewy (number/condition) |
| FD | finite differences |
| FFT | Fast Fourier Transform |
| IP | scattered data interpolation |
| LDDMM | Large Deformation Diffeomorphic Metric Mapping |
| MPI | Message Passing Interface |
| PCG | Preconditioned Conjugate Gradient (method) |
| Dataset | Image Modality | Number of Images | Spatial Resolution | Image Resolution |
|---|---|---|---|---|
| MUSE | -weighted MRI | 5 | 1 mm | (256,256,256) |
| NIREP | -weighted MRI | 16 | 1 mm | (256,300,256) |
| SYN | synthetic | 4 | – | (1024,1024,1024) |
| MRI250 | -weighted MRI | 1 | 250m | (640,880,880) |
| CLARITY | CLARITY-optimized light sheet microscopy | 3 | (4.68,4.68,5) m | (2816,3016,1162) |
| Template | Runtime (s) | |||||||
|---|---|---|---|---|---|---|---|---|
| Pre | Post | Search | Continuation | |||||
| 4 | 7.75 × 10 | 1.00 × 10 | 4.53 × 10 | 5.36 × 10 | 5.53 × 10 | 6.99 × 10 | 5.90 × 10 | 4.04 × 10 |
| 16 | 7.89 × 10 | 1.00 × 10 | 2.62 × 10 | 4.23 × 10 | 5.51 × 10 | 6.95 × 10 | 4.39 × 10 | 5.82 × 10 |
| 22 | 1.14 × 10 | 1.00 × 10 | 1.19 × 10 | 1.74 × 10 | 5.39 × 10 | 7.04 × 10 | 7.05 × 10 | 9.79 × 10 |
| 31 | 2.83 × 10 | 1.00 × 10 | 2.40 × 10 | 1.86 × 10 | 5.27 × 10 | 7.00 × 10 | 6.19 × 10 | 6.07 × 10 |
| Template | Runtime (s) | ||||
|---|---|---|---|---|---|
| Pre | Post | ||||
| 4 | 1.40 × 10 | 3.10 × 10 | 5.53 × 10 | 6.86 × 10 | 1.98 × 10 |
| 16 | 2.50 × 10 | 4.59 × 10 | 5.51 × 10 | 6.87 × 10 | 2.00 × 10 |
| 22 | 3.11 × 10 | 9.73 × 10 | 5.39 × 10 | 6.62 × 10 | 1.99 × 10 |
| 31 | 2.07 × 10 | 4.76 × 10 | 5.27 × 10 | 6.85 × 10 | 2.10 × 10 |
| Run | K | Runtime (s) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Pre | Post | Pre | Post | Search | ||||||||
| #1 | 4 | n | 32 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 7.4 × 10 | 3.1 × 10 | 9.2 × 10 | 5.8 × 10 | 9.8 × 10 | 3.9 × 10 | 8.5 × 10 | 2.9 × 10 |
| #2 | n/2 | 16 | 1.1 × 10 | 1.0 × 10 | 1.9 × 10 | 7.7 × 10 | 8.7 × 10 | 9.7 × 10 | 7.0 × 10 | 6.5 × 10 | ||||
| #3 | n/4 | 8 | 1.1 × 10 | 1.0 × 10 | 2.6 × 10 | 1.4 × 10 | 7.9 × 10 | 9.5 × 10 | 5.0 × 10 | 1.1 × 10 | ||||
| #4 | n/8 | 4 | 1.1 × 10 | 1.0 × 10 | 4.7 × 10 | 5.6 × 10 | 6.7 × 10 | 9.1 × 10 | 1.8 × 10 | 1.5 × 10 | ||||
| #5 | 8 | n | 32 | 1.1 × 10 | 1.0 × 10 | 5.1 × 10 | 1.0 × 10 | 3.2 × 10 | 9.0 × 10 | 5.3 × 10 | 9.8 × 10 | 7.4 × 10 | 7.6 × 10 | 2.7 × 10 |
| #6 | n/2 | 16 | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 1.5 × 10 | 8.5 × 10 | 9.7 × 10 | 6.0 × 10 | 6.2 × 10 | ||||
| #7 | n/4 | 8 | 1.1 × 10 | 1.0 × 10 | 3.0 × 10 | 7.8 × 10 | 7.6 × 10 | 9.4 × 10 | 4.1 × 10 | 1.0 × 10 | ||||
| #8 | n/8 | 4 | 2.4 × 10 | 1.0 × 10 | 3.8 × 10 | 4.8 × 10 | 6.4 × 10 | 9.0 × 10 | 1.7 × 10 | 1.4 × 10 | ||||
| #9 | 12 | n | 32 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 1.2 × 10 | 3.1 × 10 | 9.2 × 10 | 5.2 × 10 | 9.8 × 10 | 9.5 × 10 | 8.5 × 10 | 2.6 × 10 |
| #10 | n/2 | 16 | 1.1 × 10 | 1.0 × 10 | 3.1 × 10 | 8.9 × 10 | 8.6 × 10 | 9.7 × 10 | 7.4 × 10 | 5.4 × 10 | ||||
| #11 | n/4 | 8 | 1.1 × 10 | 1.0 × 10 | 2.9 × 10 | 1.2 × 10 | 7.5 × 10 | 9.4 × 10 | 4.5 × 10 | 9.4 × 10 | ||||
| #12 | n/8 | 4 | 1.1 × 10 | 1.0 × 10 | 4.1 × 10 | 9.9 × 10 | 6.0 × 10 | 8.9 × 10 | 1.9 × 10 | 1.4 × 10 | ||||
| #13 | 16 | n | 32 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 9.5 × 10 | 2.9 × 10 | 9.1 × 10 | 5.1 × 10 | 9.8 × 10 | 9.0 × 10 | 8.1 × 10 | 2.4 × 10 |
| #14 | n/2 | 16 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 1.4 × 10 | 8.4 × 10 | 9.7 × 10 | 6.0 × 10 | 5.2 × 10 | ||||
| #15 | n/4 | 8 | 1.4 × 10 | 1.0 × 10 | 3.0 × 10 | 8.8 × 10 | 7.4 × 10 | 9.4 × 10 | 4.7 × 10 | 9.5 × 10 | ||||
| #16 | n/8 | 4 | 2.7 × 10 | 1.0 × 10 | 3.9 × 10 | 1.5 × 10 | 6.1 × 10 | 9.0 × 10 | 2.0 × 10 | 1.5 × 10 | ||||
| Run | K | Runtime (s) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Pre | Post | Pre | Post | Search | ||||||||
| #1 | 8 | 4 | n/2 | 1.4 × 10 | 1.0 × 10 | 9.7 × 10 | 1.1 × 10 | 3.2 × 10 | 8.8 × 10 | 5.3 × 10 | 9.8 × 10 | 7.4 × 10 | 7.4 × 10 | 3.9 × 10 |
| #2 | n/4 | 1.1 × 10 | 1.0 × 10 | 3.8 × 10 | 3.8 × 10 | 6.8 × 10 | 9.2 × 10 | 2.1 × 10 | 7.9 × 10 | |||||
| #3 | n/8 | 2.4 × 10 | 1.0 × 10 | 3.8 × 10 | 4.8 × 10 | 6.2 × 10 | 8.9 × 10 | 1.6 × 10 | 1.4 × 10 | |||||
| #4 | 8 | n/4 | 1.1 × 10 | 1.0 × 10 | 2.9 × 10 | 7.7 × 10 | 7.5 × 10 | 9.4 × 10 | 4.1 × 10 | 1.0 × 10 | ||||
| #5 | n/8 | 1.7 × 10 | 1.0 × 10 | 3.9 × 10 | 6.4 × 10 | 5.9 × 10 | 8.7 × 10 | 1.6 × 10 | 1.6 × 10 | |||||
| #6 | 16 | n/2 | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 1.4 × 10 | 8.3 × 10 | 9.7 × 10 | 5.2 × 10 | 5.9 × 10 | ||||
| #7 | n/4 | 1.1 × 10 | 1.0 × 10 | 3.1 × 10 | 8.2 × 10 | 7.1 × 10 | 9.2 × 10 | 3.4 × 10 | 1.2 × 10 | |||||
| #8 | n/8 | 1.1 × 10 | 1.0 × 10 | 5.4 × 10 | 3.2 × 10 | 5.6 × 10 | 8.5 × 10 | 1.4 × 10 | 6.7 × 10 | |||||
| #9 | 32 | n | 1.1 × 10 | 1.0 × 10 | 5.1 × 10 | 1.0 × 10 | 9.0 × 10 | 9.8 × 10 | 7.6 × 10 | 2.7 × 10 | ||||
| #10 | n/2 | 1.1 × 10 | 1.0 × 10 | 1.2 × 10 | 1.9 × 10 | 7.8 × 10 | 9.5 × 10 | 4.2 × 10 | 7.6 × 10 | |||||
| #11 | n/4 | 1.1 × 10 | 1.0 × 10 | 3.1 × 10 | 1.0 × 10 | 6.8 × 10 | 9.0 × 10 | 3.3 × 10 | 1.9 × 10 | |||||
| #12 | n/8 | 1.1 × 10 | 1.0 × 10 | 5.2 × 10 | 3.2 × 10 | 5.6 × 10 | 8.5 × 10 | 1.4 × 10 | 4.8 × 10 | |||||
| #13 | 16 | 4 | n/2 | 1.3 × 10 | 1.0 × 10 | 2.0 × 10 | 6.9 × 10 | 2.9 × 10 | 8.6 × 10 | 5.1 × 10 | 9.7 × 10 | 9.0 × 10 | 7.8 × 10 | 3.7 × 10 |
| #14 | 32 | n | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 9.5 × 10 | 9.1 × 10 | 9.8 × 10 | 8.1 × 10 | 2.4 × 10 | ||||
| Run | NIREP | r | Runtime (s) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Search | |||||||||
| #1 | na01 | n | 16 | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 8.3 × 10 | 2.5 × 10 | 5.5 × 10 | 9.0 × 10 | 3.1 × 10 |
| #2 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 6.5 × 10 | 3.5 × 10 | 8.5 × 10 | 3.4 × 10 | ||
| #3 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 2.3 × 10 | 8.2 × 10 | 4.5 × 10 | 8.0 × 10 | 3.6 × 10 | ||
| #4 | na02 | n | 16 | 1.1 × 10 | 1.0 × 10 | 7.8 × 10 | 6.3 × 10 | 2.5 × 10 | 5.4 × 10 | 8.9 × 10 | 3.3 × 10 |
| #5 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.2 × 10 | 4.3 × 10 | 3.6 × 10 | 8.3 × 10 | 3.0 × 10 | ||
| #6 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 8.1 × 10 | 1.1 × 10 | 4.6 × 10 | 7.7 × 10 | 4.0 × 10 | ||
| #7 | na03 | n | 16 | 1.1 × 10 | 1.0 × 10 | 1.1 × 10 | 6.1 × 10 | 3.3 × 10 | 5.1 × 10 | 8.4 × 10 | 3.2 × 10 |
| #8 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.1 × 10 | 1.8 × 10 | 3.9 × 10 | 8.0 × 10 | 2.9 × 10 | ||
| #9 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.0 × 10 | 1.7 × 10 | 4.7 × 10 | 7.6 × 10 | 4.2 × 10 | ||
| #10 | na04 | n | 16 | 3.1 × 10 | 1.0 × 10 | 1.2 × 10 | 1.4 × 10 | 3.7 × 10 | 5.3 × 10 | 8.0 × 10 | 1.9 × 10 |
| #11 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 6.8 × 10 | 8.9 × 10 | 2.9 × 10 | 8.7 × 10 | 5.1 × 10 | ||
| #12 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.0 × 10 | 6.8 × 10 | 4.6 × 10 | 7.6 × 10 | 3.7 × 10 | ||
| #13 | na05 | n | 16 | 1.1 × 10 | 1.0 × 10 | 9.5 × 10 | 8.9 × 10 | 3.2 × 10 | 5.3 × 10 | 8.5 × 10 | 2.8 × 10 |
| #14 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 1.1 × 10 | 3.6 × 10 | 8.3 × 10 | 2.5 × 10 | ||
| #15 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 1.6 × 10 | 4.5 × 10 | 7.8 × 10 | 3.7 × 10 | ||
| #16 | na06 | n | 16 | 1.1 × 10 | 1.0 × 10 | 7.8 × 10 | 1.4 × 10 | 2.5 × 10 | 5.3 × 10 | 8.9 × 10 | 3.3 × 10 |
| #17 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 2.0 × 10 | 5.6 × 10 | 3.5 × 10 | 8.3 × 10 | 3.0 × 10 | ||
| #18 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 7.2 × 10 | 4.4 × 10 | 7.7 × 10 | 3.6 × 10 | ||
| #19 | na07 | n | 16 | 1.0 × 10 | 1.0 × 10 | 9.5 × 10 | 2.0 × 10 | 3.0 × 10 | 5.3 × 10 | 8.6 × 10 | 2.4 × 10 |
| #20 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.6 × 10 | 1.6 × 10 | 3.5 × 10 | 8.4 × 10 | 3.9 × 10 | ||
| #21 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.7 × 10 | 1.7 × 10 | 4.5 × 10 | 7.7 × 10 | 3.7 × 10 | ||
| #22 | na08 | n | 16 | 1.1 × 10 | 1.0 × 10 | 1.3 × 10 | 4.8 × 10 | 3.1 × 10 | 5.3 × 10 | 8.6 × 10 | 2.5 × 10 |
| #23 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.0 × 10 | 1.3 × 10 | 3.8 × 10 | 8.1 × 10 | 3.0 × 10 | ||
| #24 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 9.4 × 10 | 1.7 × 10 | 4.7 × 10 | 7.5 × 10 | 4.2 × 10 | ||
| #25 | na09 | n | 16 | 1.1 × 10 | 1.0 × 10 | 6.3 × 10 | 1.5 × 10 | 2.5 × 10 | 5.3 × 10 | 8.9 × 10 | 3.5 × 10 |
| #26 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.2 × 10 | 5.1 × 10 | 3.5 × 10 | 8.3 × 10 | 2.3 × 10 | ||
| #27 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 9.9 × 10 | 7.4 × 10 | 4.5 × 10 | 7.6 × 10 | 4.2 × 10 | ||
| #28 | na10 | n | 16 | 1.1 × 10 | 1.0 × 10 | 1.1 × 10 | 5.7 × 10 | 3.2 × 10 | 5.4 × 10 | 8.5 × 10 | 2.6 × 10 |
| #29 | n/2 | 8 | 1.1 × 10 | 1.0 × 10 | 1.2 × 10 | 4.5 × 10 | 3.5 × 10 | 8.3 × 10 | 2.7 × 10 | ||
| #30 | n/4 | 4 | 1.1 × 10 | 1.0 × 10 | 1.0 × 10 | 9.1 × 10 | 4.7 × 10 | 7.6 × 10 | 4.1 × 10 | ||
| Run | NIREP | r | Runtime (s) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre | Post | Search | |||||||||
| #1 | na01 | 4 | n/2 | 1.1 × 10 | 1.0 × 10 | 9.2 × 10 | 5.2 × 10 | 3.1 × 10 | 5.5 × 10 | 8.7 × 10 | 2.7 × 10 |
| #2 | n/4 | 1.1 × 10 | 1.0 × 10 | 2.3 × 10 | 8.2 × 10 | 4.5 × 10 | 8.0 × 10 | 3.6 × 10 | |||
| #3 | 8 | n | 5.6 × 10 | 1.0 × 10 | 1.1 × 10 | 1.1 × 10 | 2.4 × 10 | 9.0 × 10 | 2.6 × 10 | ||
| #4 | n/2 | 1.1 × 10 | 1.0 × 10 | 1.9 × 10 | 6.6 × 10 | 3.5 × 10 | 8.5 × 10 | 3.1 × 10 | |||
| #5 | n/4 | 1.1 × 10 | 1.0 × 10 | 2.7 × 10 | 1.2 × 10 | 4.7 × 10 | 7.8 × 10 | 4.3 × 10 | |||
| #6 | 16 | n | 1.1 × 10 | 1.0 × 10 | 1.8 × 10 | 8.4 × 10 | 2.5 × 10 | 9.0 × 10 | 3.2 × 10 | ||
| #7 | n/2 | 1.1 × 10 | 1.0 × 10 | 2.6 × 10 | 7.6 × 10 | 3.8 × 10 | 8.3 × 10 | 3.6 × 10 | |||
| #8 | n/4 | 1.1 × 10 | 1.0 × 10 | 2.8 × 10 | 1.6 × 10 | 4.8 × 10 | 7.7 × 10 | 5.5 × 10 | |||
| Run | Image | #GPU | r | Runtime (s) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| #1 | Fear197 | 256 | n | 16 | 1.1 × 10 | 1.0 × 10 | 5.5 × 10 | 2.2 × 10 | 3.4 × 10 | 1.4 × 10 |
| #2 | 8 | n/8 | 16 | 1.0 × 10 | 1.0 × 10 | 5.8 × 10 | 1.5 × 10 | 6.3 × 10 | 9.6 × 10 | |
| #3 | Cocain178 | 256 | n | 16 | 1.1 × 10 | 1.0 × 10 | 3.1 × 10 | 1.2 × 10 | 4.1 × 10 | 6.2 × 10 |
| #4 | 8 | n/8 | 16 | 5.6 × 10 | 1.0 × 10 | 3.5 × 10 | 4.7 × 10 | 6.8 × 10 | 6.1 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Himthani, N.; Brunn, M.; Kim, J.-Y.; Schulte, M.; Mang, A.; Biros, G. CLAIRE—Parallelized Diffeomorphic Image Registration for Large-Scale Biomedical Imaging Applications. J. Imaging 2022, 8, 251. https://doi.org/10.3390/jimaging8090251
Himthani N, Brunn M, Kim J-Y, Schulte M, Mang A, Biros G. CLAIRE—Parallelized Diffeomorphic Image Registration for Large-Scale Biomedical Imaging Applications. Journal of Imaging. 2022; 8(9):251. https://doi.org/10.3390/jimaging8090251
Chicago/Turabian StyleHimthani, Naveen, Malte Brunn, Jae-Youn Kim, Miriam Schulte, Andreas Mang, and George Biros. 2022. "CLAIRE—Parallelized Diffeomorphic Image Registration for Large-Scale Biomedical Imaging Applications" Journal of Imaging 8, no. 9: 251. https://doi.org/10.3390/jimaging8090251
APA StyleHimthani, N., Brunn, M., Kim, J.-Y., Schulte, M., Mang, A., & Biros, G. (2022). CLAIRE—Parallelized Diffeomorphic Image Registration for Large-Scale Biomedical Imaging Applications. Journal of Imaging, 8(9), 251. https://doi.org/10.3390/jimaging8090251