
A 3D-Printed Soft Haptic Device with Built-in Force Sensing Delivering Bio-Mimicked Feedback





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
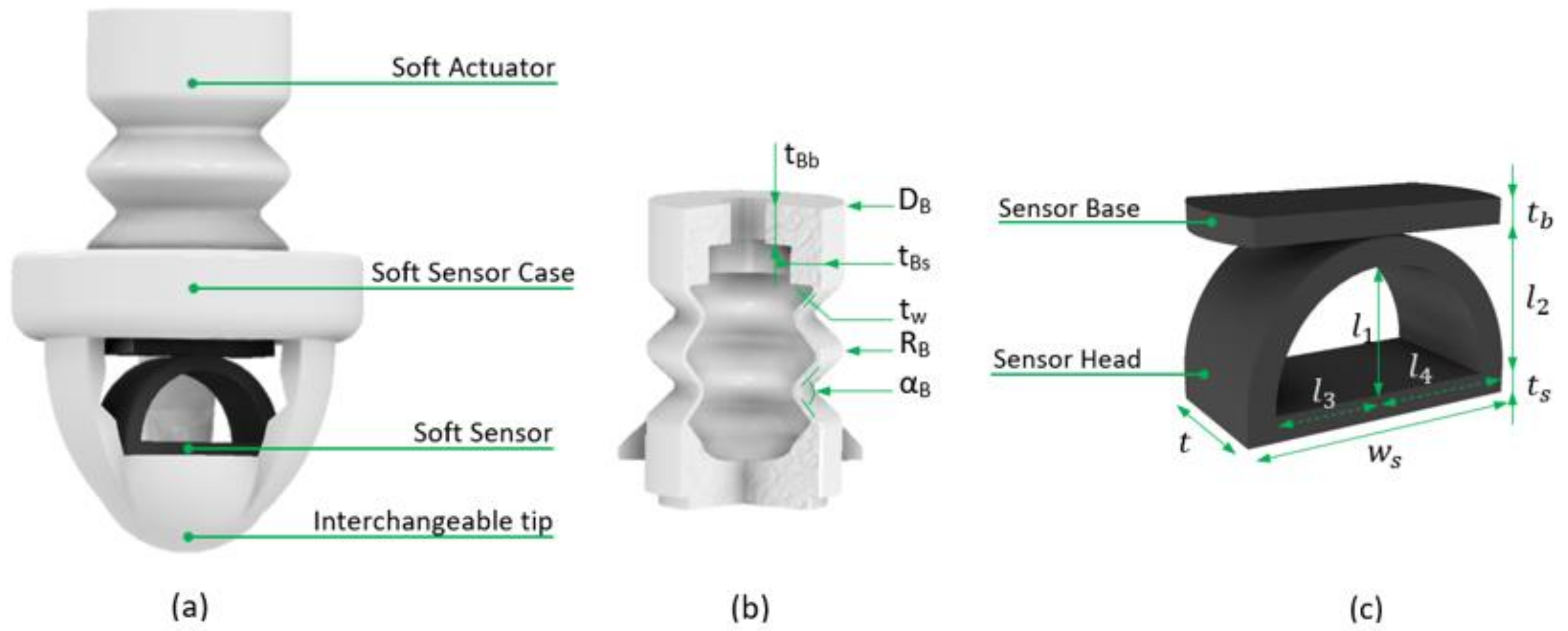
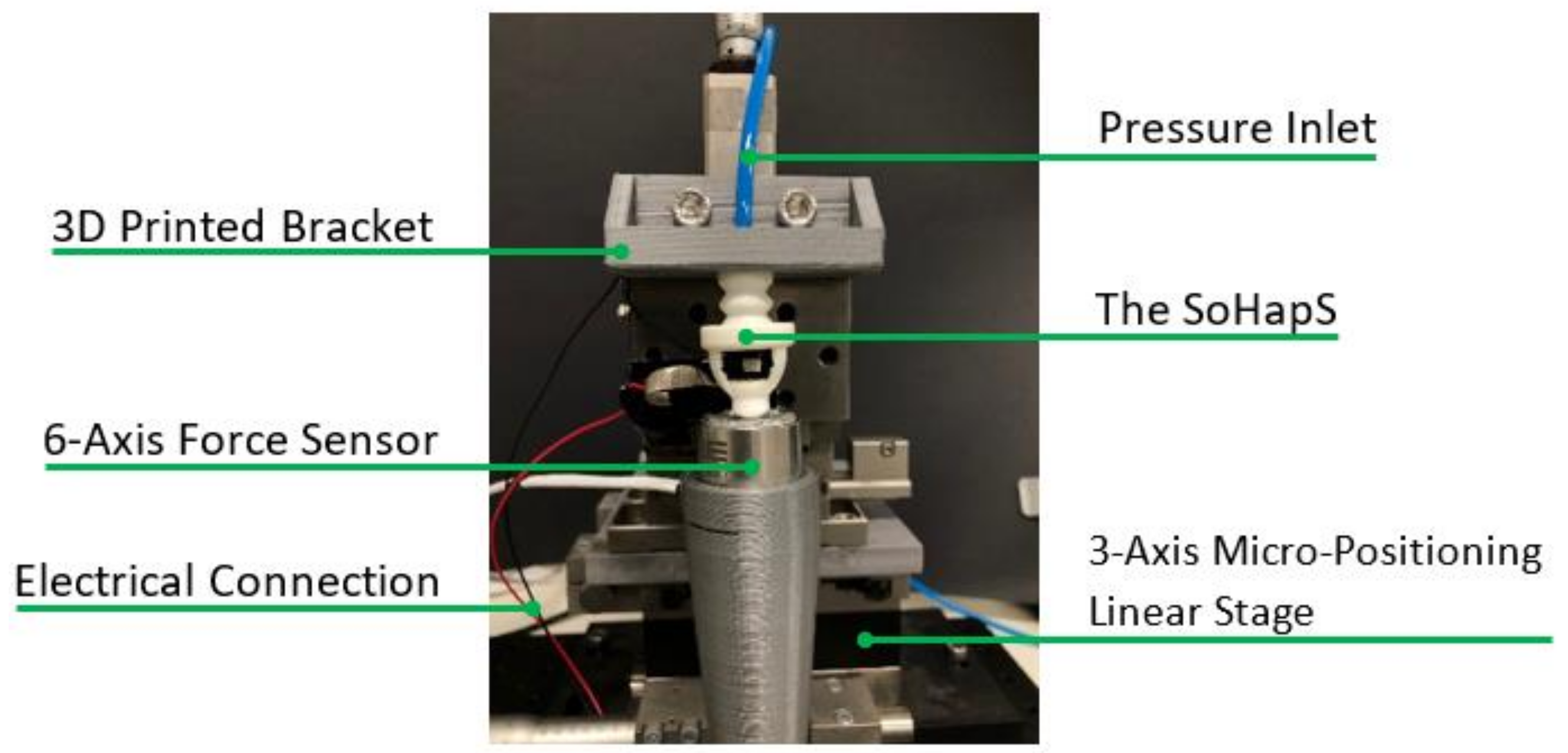
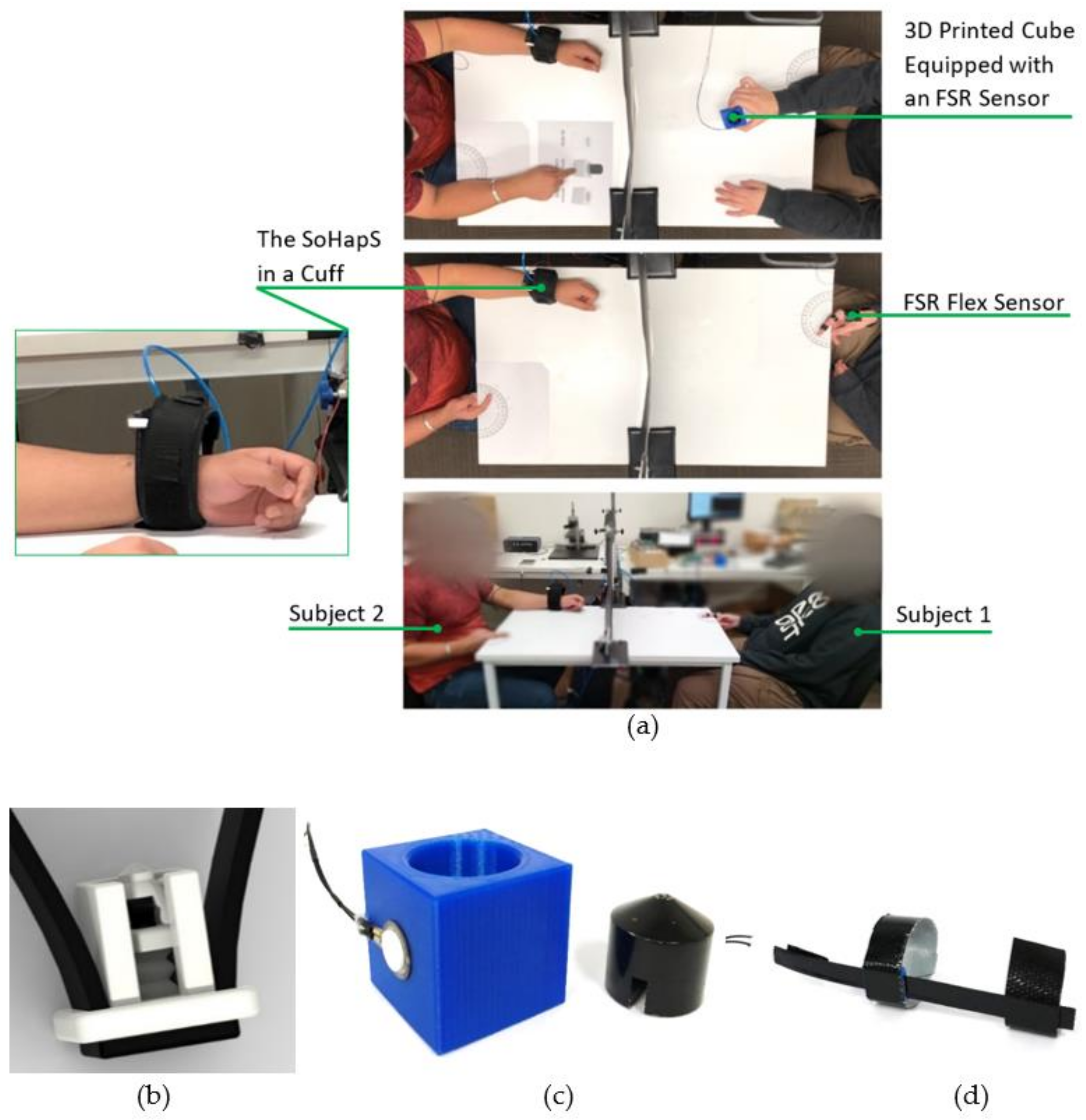
2.1. Design, Fabrication, and Instrumentation of SoHapS
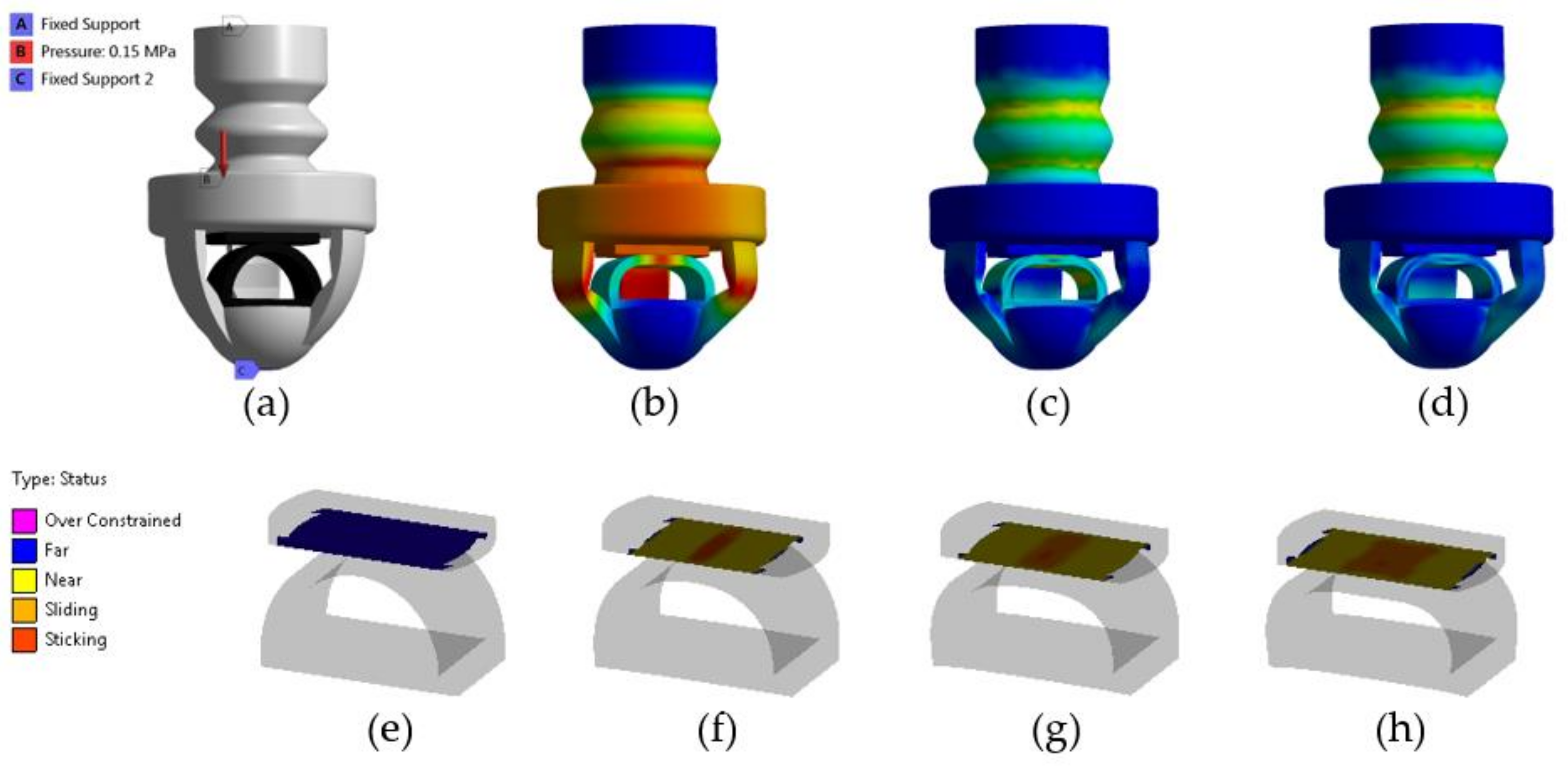
2.2. Finite Element Analysis (FEA)
2.3. Characterization and Modelling
3. Experimental Results and Discussion
3.1. Steady-State Characteristics
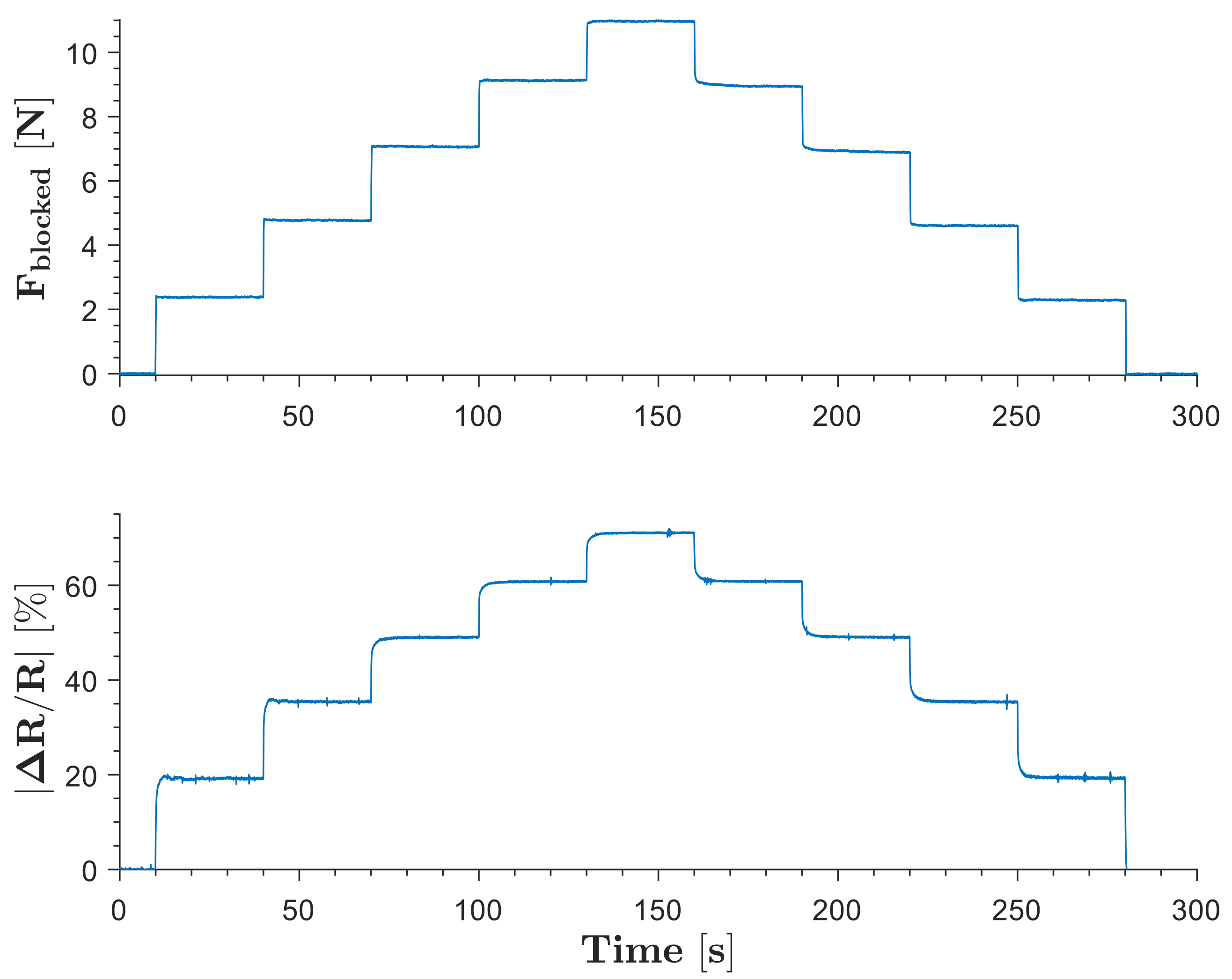
3.1.1. Blocked Force
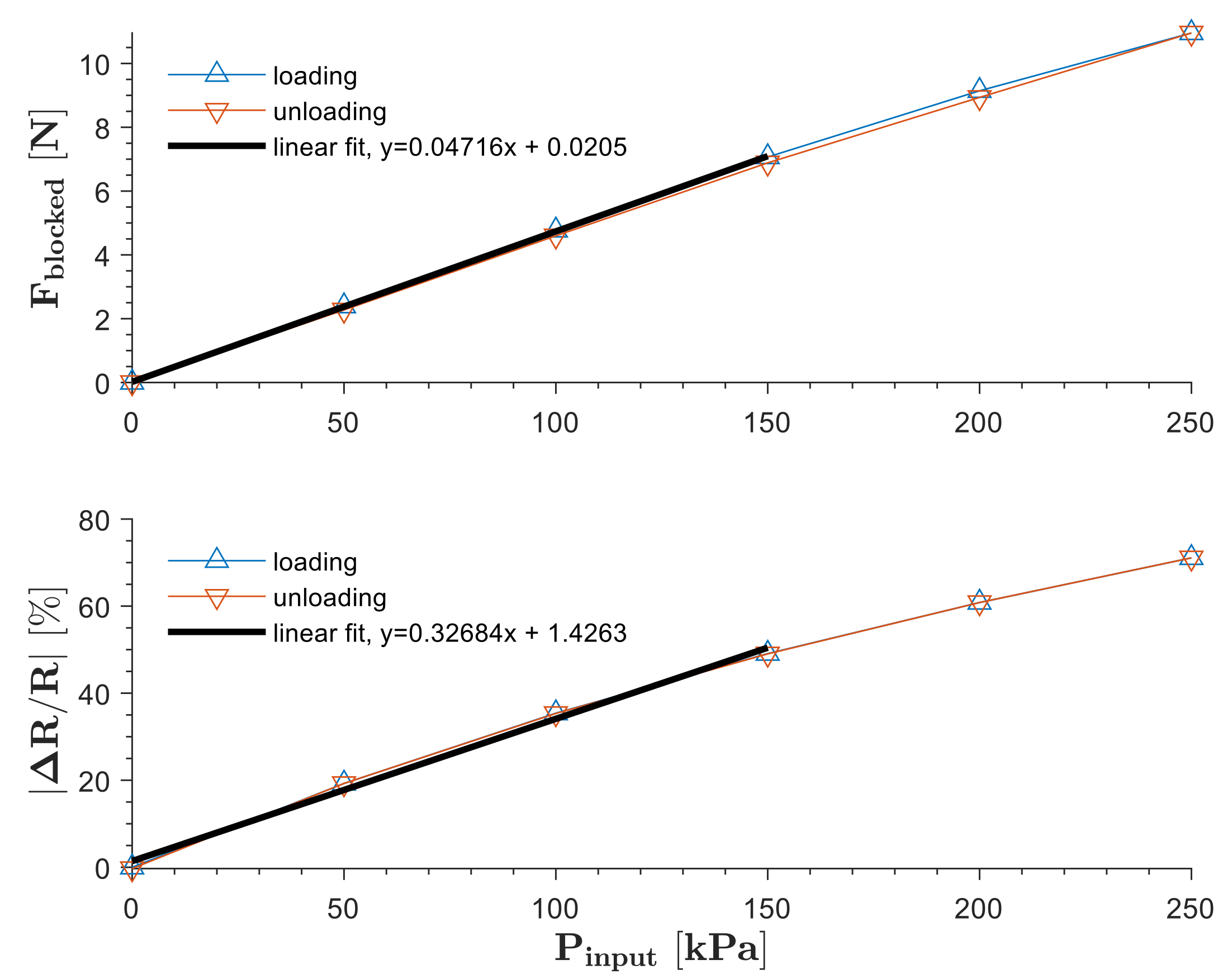
3.1.2. Linearity and Sensitivity
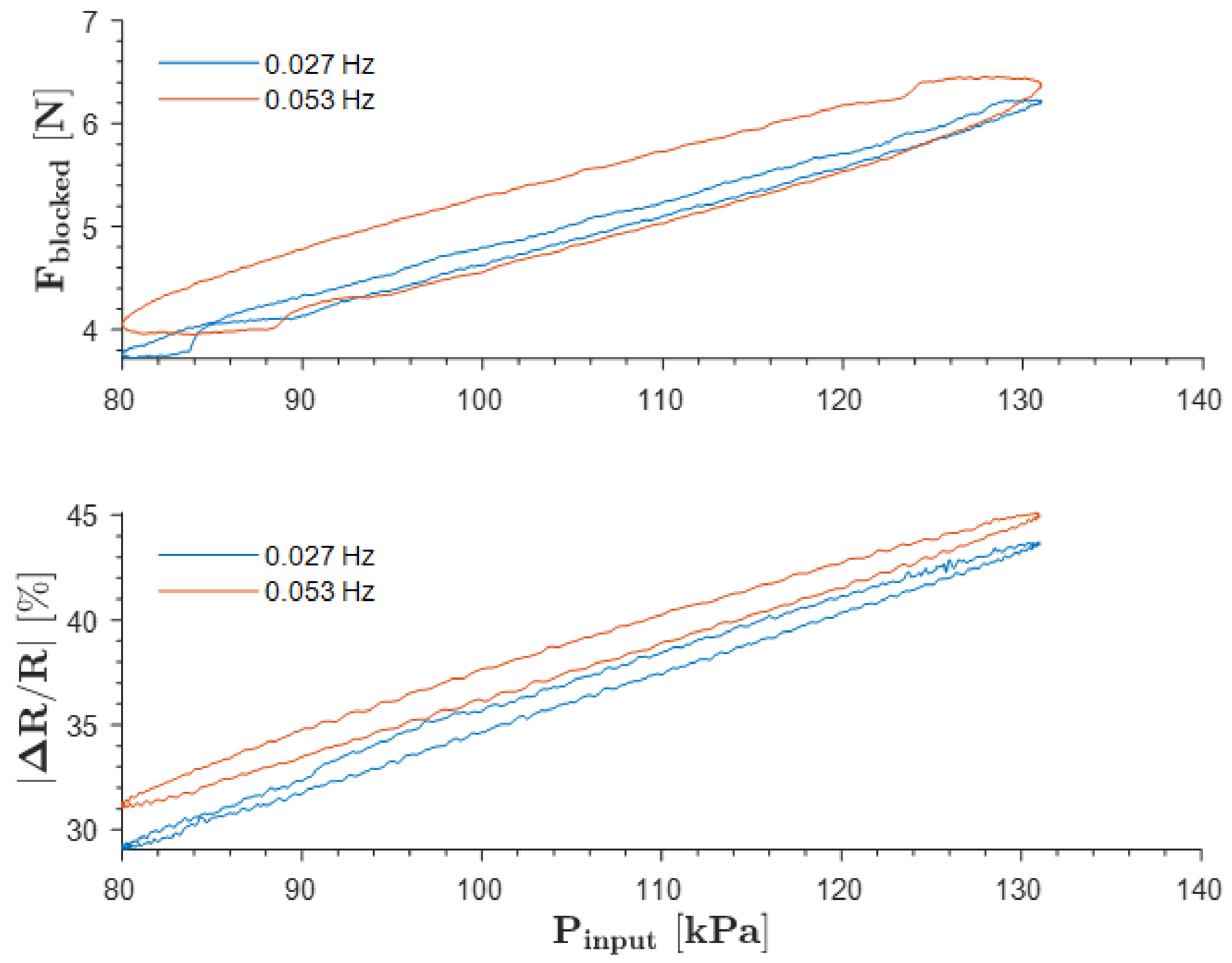
3.1.3. Hysteresis
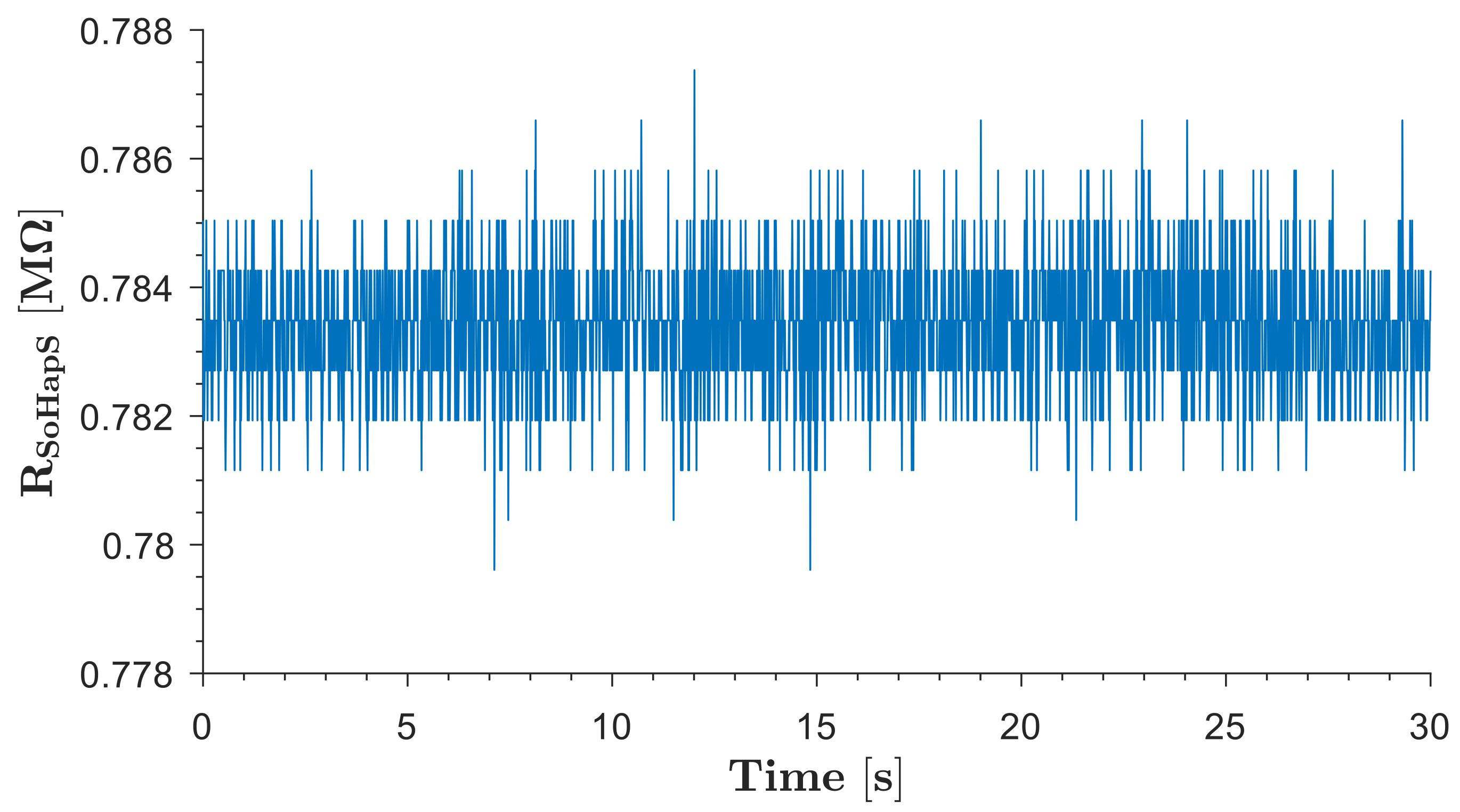
3.1.4. Signal-to-Noise Ratio
3.2. Dynamic Response Characteristics
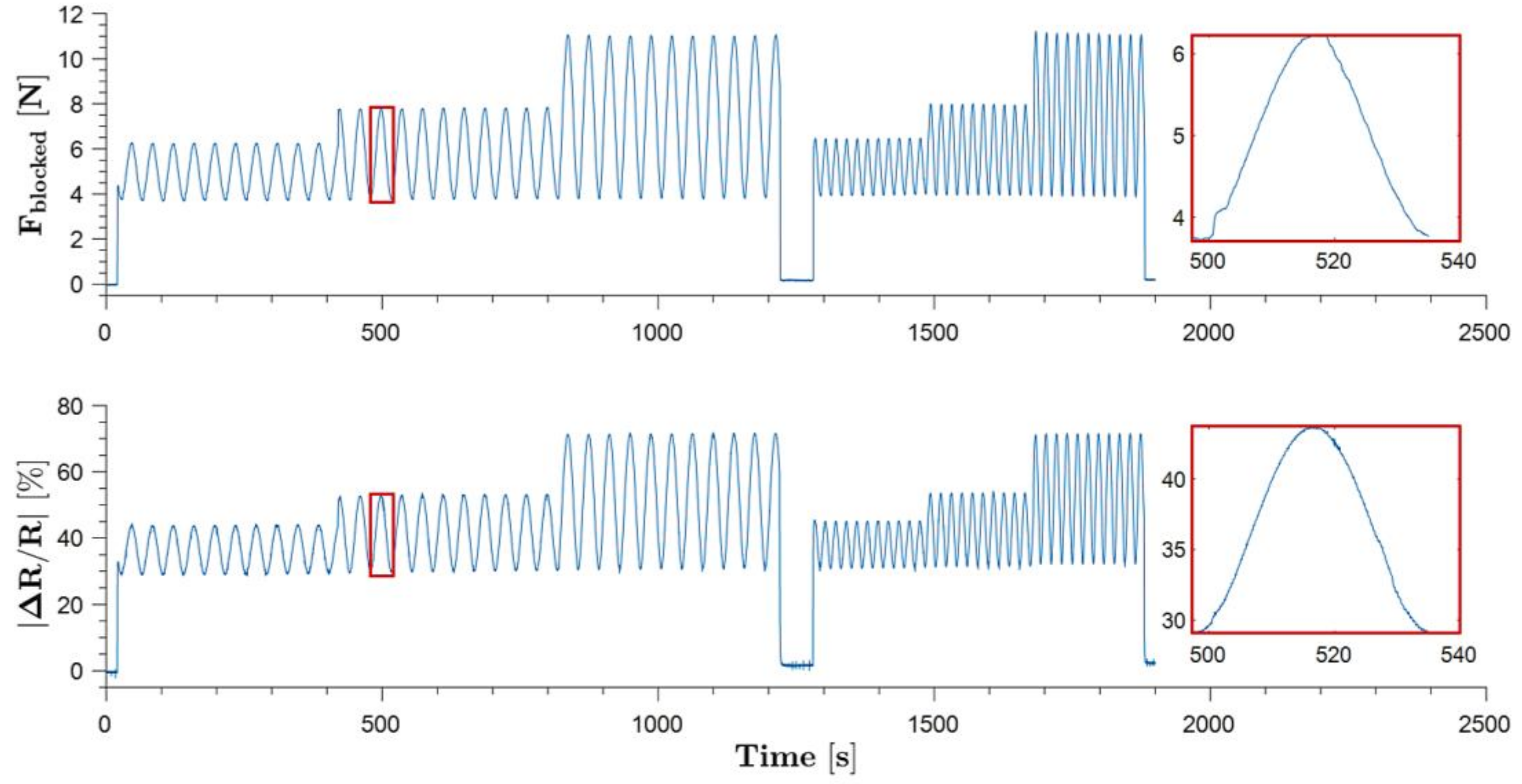
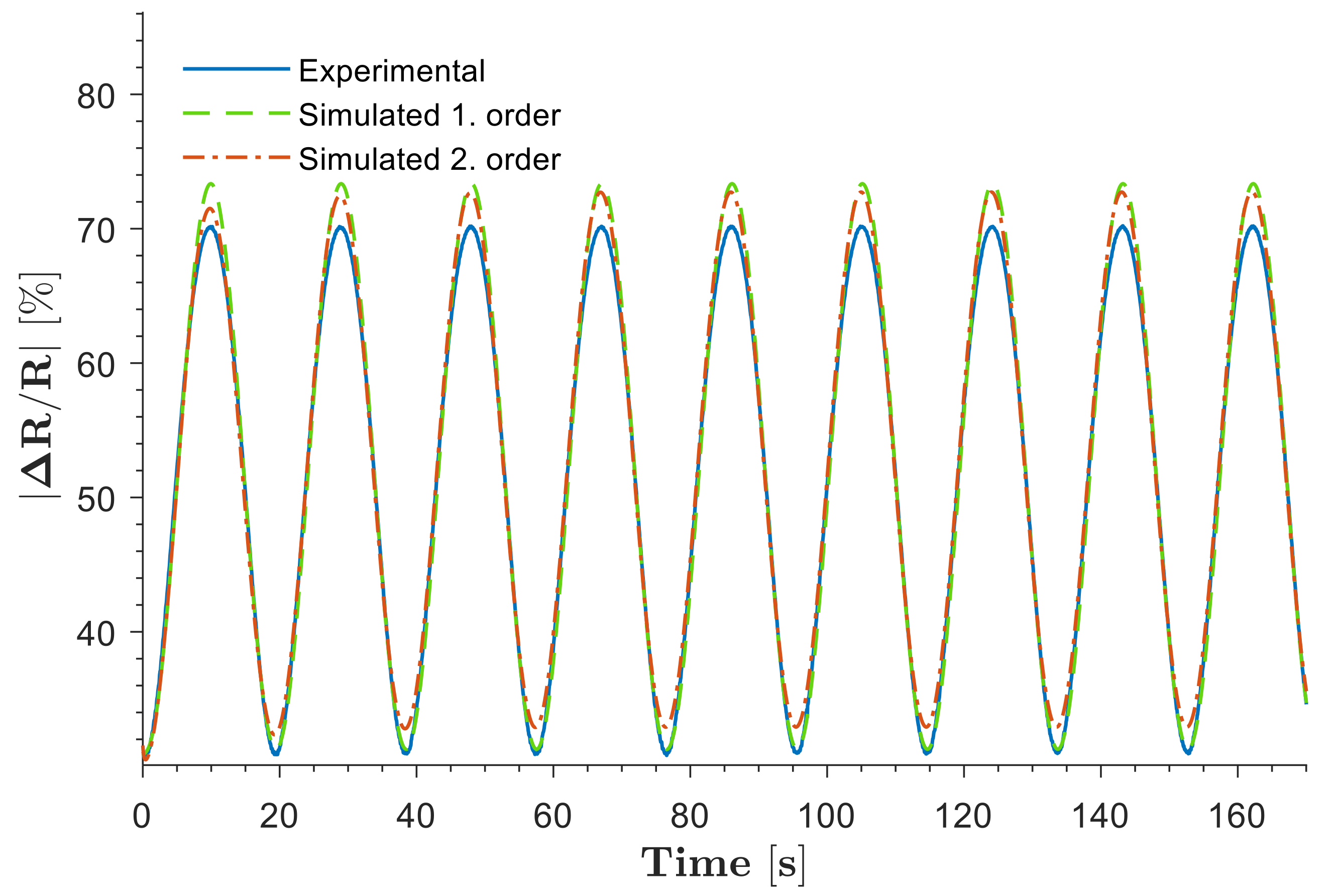
3.2.1. Cyclic Input Response
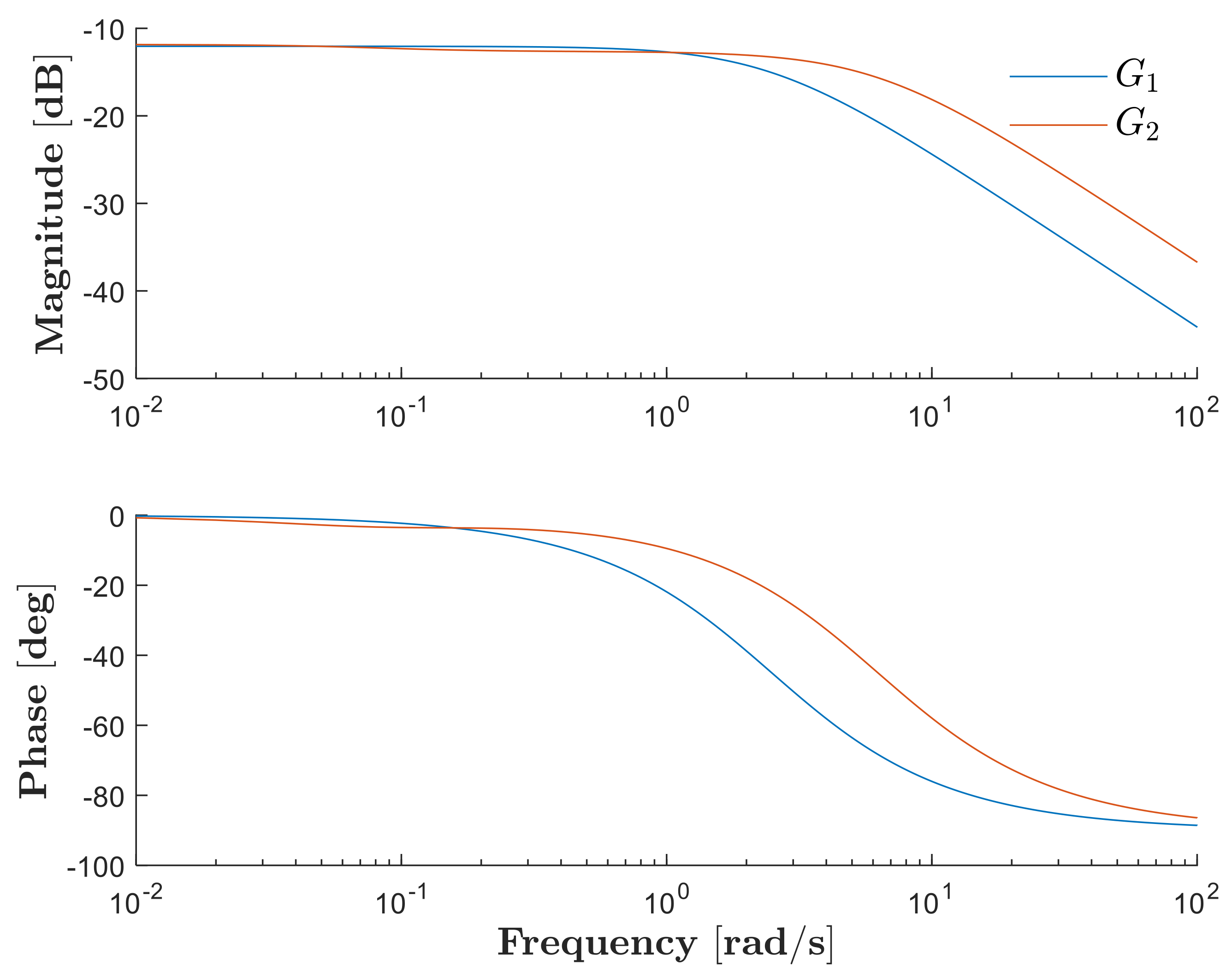
3.2.2. Dynamic Model Estimation
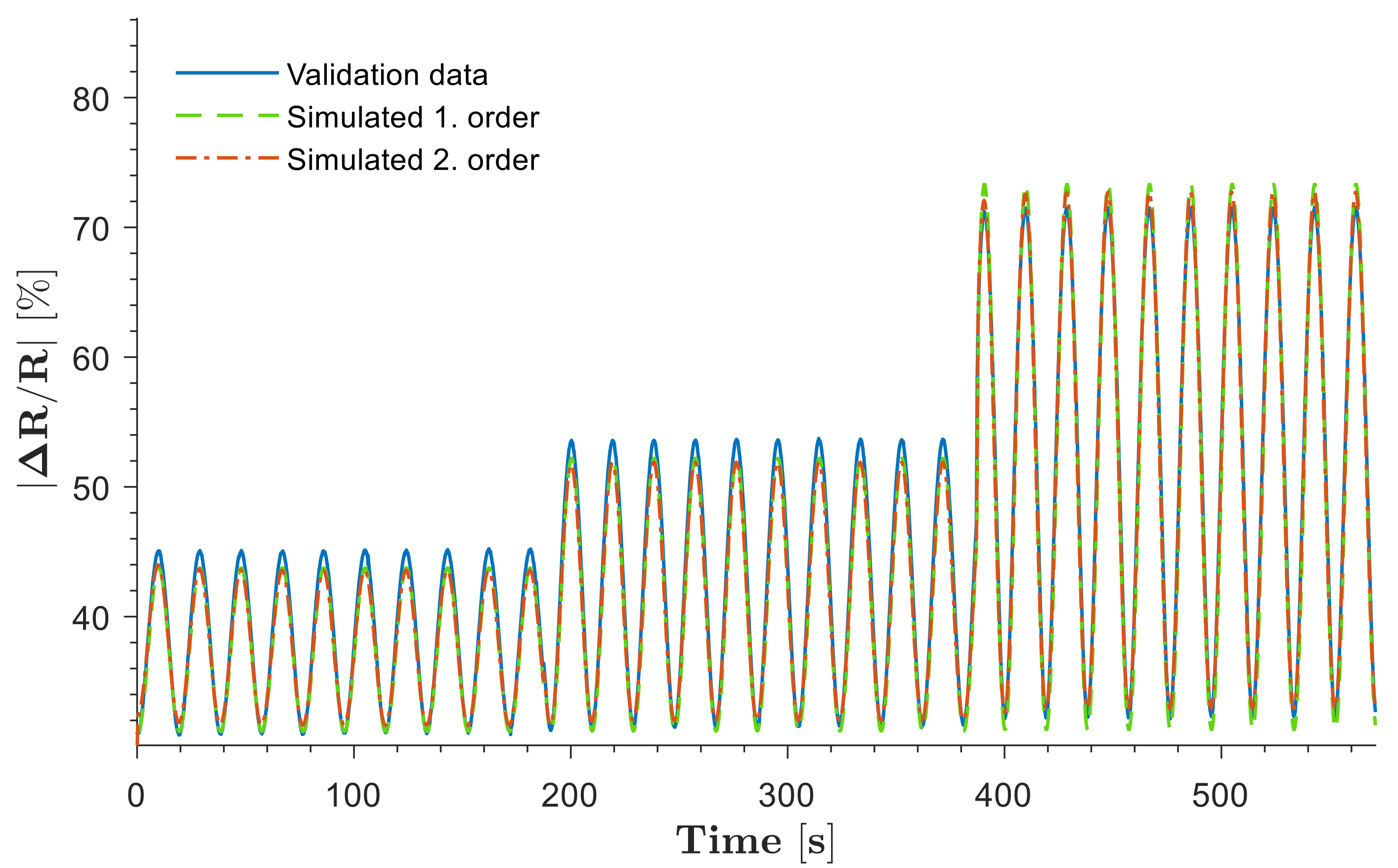
3.2.3. Validation
4. Inducing Bio-Mimicked Feedback with SoHapS
4.1. Communicating Gripping Force as Tactile Feedback
4.2. Communicating Proprioceptive Feedback
5. Conclusions and Outlook
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A
References
- Salisbury, K.; Conti, F.; Barbagli, F. Haptic rendering: Introductory concepts. IEEE Comput. Graph. Appl. 2004, 24, 24–32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hernantes, J.D.I.; Borro, D.; Gil, J. Effective Haptic Rendering Method for Complex Interactions. In Haptics Rendering and Applications; Saddik, A.E., Ed.; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef] [Green Version]
- Feygin, D.; Keehner, M.; Tendick, R. Haptic guidance: Experimental evaluation of a haptic training method for a perceptual motor skill. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. HAPTICS 2002, Orlando, FL, USA, 24–25 March 2002; pp. 40–47. [Google Scholar]
- Williams, R., II; Srivastava, M.; Conatster, R.R., Jr.; Howell, J.N. Implementation and evaluation of a haptic playback system. Haptics-E 2004, 3, 1–5. [Google Scholar]
- Patton, J.L.; Mussa-Ivaldi, F.A. Robot-assisted adaptive training: Custom force fields for teaching movement patterns. IEEE Trans. Biomed. Eng. 2004, 51, 636–646. [Google Scholar] [CrossRef] [PubMed]
- Essick, G.K.; McGlone, F.; Dancer, C.; Fabricant, D.; Ragin, Y.; Phillips, N.; Jones, T.; Guest, S. Quantitative assessment of pleasant touch. Neurosci. Biobehav. Rev. 2010, 34, 192–203. [Google Scholar] [CrossRef] [PubMed]
- Yem, V.; Vu, K.; Kon, Y.; Kajimoto, H. Effect of Electrical Stimulation Haptic Feedback on Perceptions of Softness-Hardness and Stickiness While Touching a Virtual Object. In Proceedings of the 2018 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Tuebingen/Reutlingen, Germany, 18–22 March 2018; pp. 89–96. [Google Scholar]
- Delazio, A.; Nakagaki, K.; Klatzky, R.; Hudson, S.; Lehman, J.; Sample, A. Force Jacket: Pneumatically-Actuated Jacket for Embodied Haptic Experiences; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–12. [Google Scholar] [CrossRef]
- Enayati, N.; Momi, E.D.; Ferrigno, G. Haptics in Robot-Assisted Surgery: Challenges and Benefits. IEEE Rev. Biomed. Eng. 2016, 9, 49–65. [Google Scholar] [CrossRef] [Green Version]
- Al-Dabas, S.A.A.M.; Miskon, M.F.; Shukor, A.Z.; Bahar, M.B.; Mohammed, M.Q. Review On Application of Haptic in Robotic Rehabilitation Technology. Int. J. Appl. Eng. Res. 2017, 27, 3203–3213. [Google Scholar]
- Chiu, P.; Lee, S.; Yeh, S. Pinch simulation with haptic feedback for stroke rehabilitation: A pilot study. In Proceedings of the 2017 2nd International Conference on Information Technology (INCIT), Seoul, Republic of Korea, 2–3 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]
- Choi, I.; Culbertson, H.; Miller, M.R.; Olwal, A.; Follmer, S. Grabity: A Wearable Haptic Interface for Simulating Weight and Grasping in Virtual Reality. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Québec City, QC, Canada, 22–25 October 2017; pp. 119–130. [Google Scholar]
- Zhu, M.; Memar, A.H.; Gupta, A.; Samad, M.; Agarwal, P.; Visell, Y.; Keller, S.J.; Colonnese, N. PneuSleeve: In-fabric Multimodal Actuation and Sensing in a Soft, Compact, and Expressive Haptic Sleeve. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Gupta, A.; Malley, M.K.O. Design of a haptic arm exoskeleton for training and rehabilitation. IEEE/ASME Trans. Mechatron. 2006, 11, 280–289. [Google Scholar] [CrossRef]
- Frati, V.; Prattichizzo, D. Using Kinect for hand tracking and rendering in wearable haptics. In Proceedings of the 2011 IEEE World Haptics Conference, Istanbul, Turkey, 21–24 June 2011; pp. 317–321. [Google Scholar]
- Bonanni, L.; Vaucelle, C.; Lieberman, J.; Zuckerman, O. TapTap: A haptic wearable for asynchronous distributed touch therapy. In Proceedings of the CHI ’06 Extended Abstracts on Human Factors in Computing Systems, Montréal, QC, Canada, 22–27 April 2006; pp. 580–585. [Google Scholar]
- Bortone, I.; Leonardis, D.; Mastronicola, N.; Crecchi, A.; Bonfiglio, L.; Procopio, C.; Solazzi, M.; Frisoli, A. Wearable Haptics and Immersive Virtual Reality Rehabilitation Training in Children With Neuromotor Impairments. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1469–1478. [Google Scholar] [CrossRef]
- Raitor, M.; Walker, J.M.; Okamura, A.M.; Culbertson, H. WRAP: Wearable, restricted-aperture pneumatics for haptic guidance. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 427–432. [Google Scholar]
- Yeh, I.L.; Holst-Wolf, J.; Elangovan, N.; Cuppone, A.V.; Lakshminarayan, K.; Capello, L.; Masia, L.; Konczak, J. Effects of a robot-aided somatosensory training on proprioception and motor function in stroke survivors. J. NeuroEng. Rehabil. 2021, 18, 77. [Google Scholar] [CrossRef]
- Tavakoli, M.; Patel, R.; Moallem, M. Haptic interaction in robot-assisted endoscopic surgery: A sensorized end-effector. Int. J. Med. Robot. Comput. Assist. Surg. 2005, 1, 53–63. [Google Scholar]
- Sherman, W.R.; Craig, A.B. Understanding Virtual Reality: Interface, Application, and Design; Morgan Kaufmann: Burlington, MA, USA, 2018. [Google Scholar]
- Lee, Y.; Kim, M.; Lee, Y.; Kwon, J.; Park, Y.-L.; Lee, D. Wearable finger tracking and cutaneous haptic interface with soft sensors for multi-fingered virtual manipulation. IEEE/ASME Trans. Mechatron. 2018, 24, 67–77. [Google Scholar] [CrossRef]
- Kim, M.; Jeon, C.; Kim, J. A study on immersion and presence of a portable hand haptic system for immersive virtual reality. Sensors 2017, 17, 1141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.-S.; Park, J.-M.; Cha, Y. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Sci. Rep. 2019, 9, 8988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sommerfeld, D.K.; Eek, E.U.-B.; Svensson, A.; Holmqvist, L.W.; von Arbin, M.H. Spasticity after stroke: Its occurrence and association with motor impairments and activity limitations. Stroke 2004, 35, 134–139. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marque, P.; Gasq, D.; Castel-Lacanal, E.; De Boissezon, X.; Loubinoux, I. Post-stroke hemiplegia rehabilitation: Evolution of the concepts. Ann. Phys. Rehabil. Med. 2014, 57, 520–529. [Google Scholar] [CrossRef] [Green Version]
- Atashzar, S.F.; Shahbazi, M.; Tavakoli, M.; Patel, R.V. A Passivity-Based Approach for Stable Patient–Robot Interaction in Haptics-Enabled Rehabilitation Systems: Modulated Time-Domain Passivity Control. IEEE Trans. Control Syst. Technol. 2017, 25, 991–1006. [Google Scholar] [CrossRef]
- Stefan, K.; Kunesch, E.; Cohen, L.G.; Benecke, R.; Classen, J. Induction of plasticity in the human motor cortex by paired associative stimulation. Brain 2000, 123, 572–584. [Google Scholar] [CrossRef] [Green Version]
- Maier, M.; Ballester, B.R.; Verschure, P.F.M.J. Principles of Neurorehabilitation after Stroke Based on Motor Learning and Brain Plasticity Mechanisms. Front. Syst. Neurosci. 2019, 13, 74. [Google Scholar] [CrossRef] [Green Version]
- Stephens-Fripp, B.; Mutlu, R.; Alici, G. A Comparison of Recognition and Sensitivity in the Upper Arm and Lower Arm to Mechanotactile Stimulation. IEEE Trans. Med. Robot. Bionics 2020, 2, 76–85. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Sencadas, V.; Mutlu, R.; Alici, G. Reusable Flexible Concentric Electrodes Coated with a Conductive Graphene Ink for Electrotactile Stimulation. Front. Bioeng. Biotechnol. 2018, 6, 179. [Google Scholar] [CrossRef] [Green Version]
- Stanton, R.; Ada, L.; Dean, C.M.; Preston, E. Biofeedback improves performance in lower limb activities more than usual therapy in people following stroke: A systematic review. J. Physiother. 2017, 63, 11–16. [Google Scholar] [CrossRef] [Green Version]
- Akther, A.; Kafy, A.; Zhai, L.; Kim, H.C.; Shishir, M.D.I.R.; Kim, J. Ultrasonic wave propagation of flexible piezoelectric polymer for tactile actuator: Simulation and experiment. Smart Mater. Struct. 2016, 25, 115043. [Google Scholar] [CrossRef]
- Yun, G.-Y.; Kim, J.; Kim, J.-H.; Kim, S.-Y. Fabrication and testing of cellulose EAPap actuators for haptic application. Sens. Actuators A Phys. 2010, 164, 68–73. [Google Scholar] [CrossRef]
- Lu, T.; Huang, J.; Jordi, C.; Kovacs, G.; Huang, R.; Clarke, D.R.; Suo, Z. Dielectric elastomer actuators under equal-biaxial forces, uniaxial forces, and uniaxial constraint of stiff fibers. Soft Matter 2012, 8, 6167–6173. [Google Scholar] [CrossRef] [Green Version]
- Sonar, H.A.; Paik, J. Soft Pneumatic Actuator Skin with Piezoelectric Sensors for Vibrotactile Feedback. Front. Robot. AI 2016, 2, 38. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Hussain, A.M.; Israr, A.; Vogt, D.M.; Duduta, M.; Clarke, D.R.; Wood, R.J. A Wearable Soft Haptic Communicator Based on Dielectric Elastomer Actuators. Soft Robot. 2020, 7, 451–461. [Google Scholar] [CrossRef]
- Held, J.P.; Klaassen, B.; van Beijnum, B.-J.F.; Luft, A.R.; Veltink, P.H. Usability Evaluation of a VibroTactile Feedback System in Stroke Subjects. Front. Bioeng. Biotechnol. 2017, 4, 98. [Google Scholar] [CrossRef] [Green Version]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot 2016, 1, eaah3690. [Google Scholar] [CrossRef] [Green Version]
- Tawk, C.; Gao, Y.; Mutlu, R.; Alici, G. Fully 3D Printed Monolithic Soft Gripper with High Conformal Grasping Capability. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 1139–1144. [Google Scholar]
- Singh, D.; Tawk, C.; Mutlu, R.; Sencadas, V.; Alici, G. A 3D Printed Soft Force Sensor for Soft Haptics. In Proceedings of the 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CI, USA, 15 May–15 July 2020; pp. 458–463. [Google Scholar]
- Tawk, C.; in het Panhuis, M.; Spinks, G.M.; Alici, G. Bioinspired 3D Printable Soft Vacuum Actuators for Locomotion Robots, Grippers and Artificial Muscles. Soft Robot. 2018, 5, 685–694. [Google Scholar] [CrossRef]
- Sencadas, V.; Mutlu, R.; Alici, G. Large area and ultra-thin compliant strain sensors for prosthetic devices. Sens. Actuators A Phys. 2017, 266, 56–64. [Google Scholar] [CrossRef] [Green Version]
- Abd, M.A.; Bornstein, M.; Tognoli, E.; Engeberg, E.D. Armband with Soft Robotic Actuators and Vibrotactile Stimulators for Bimodal Haptic Feedback from a Dexterous Artificial Hand. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 13–20. [Google Scholar]
- Wu, W.; Culbertson, H. Wearable Haptic Pneumatic Device for Creating the Illusion of Lateral Motion on the Arm. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 193–198. [Google Scholar]
- Yu, X.; Mahajan, B.K.; Shou, W.; Pan, H. Materials, Mechanics, and Patterning Techniques for Elastomer-Based Stretchable Conductors. Micromachines 2017, 8, 7. [Google Scholar] [CrossRef] [Green Version]
- Rinaldi, A.; Tamburrano, A.; Fortunato, M.; Sarto, M.S. A Flexible and Highly Sensitive Pressure Sensor Based on a PDMS Foam Coated with Graphene Nanoplatelets. Sensors 2016, 16, 2148. [Google Scholar] [CrossRef] [Green Version]
- Kumbay Yildiz, S.; Mutlu, R.; Alici, G. Fabrication and characterisation of highly stretchable elastomeric strain sensors for prosthetic hand applications. Sens. Actuators A Phys. 2016, 247, 514–521. [Google Scholar] [CrossRef]
- Aydin, M.; Mutlu, R.; Singh, D.; Sariyildiz, E.; Coman, R.; Mayland, E.; Shemmell, J.; Lee, W. Novel Soft Haptic BiofeedbacK—Pilot Study on Postural Balance and Proprioception. Sensors 2022, 22, 3779. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mutlu, R.; Singh, D.; Tawk, C.; Sariyildiz, E. A 3D-Printed Soft Haptic Device with Built-in Force Sensing Delivering Bio-Mimicked Feedback. Biomimetics 2023, 8, 127. https://doi.org/10.3390/biomimetics8010127
Mutlu R, Singh D, Tawk C, Sariyildiz E. A 3D-Printed Soft Haptic Device with Built-in Force Sensing Delivering Bio-Mimicked Feedback. Biomimetics. 2023; 8(1):127. https://doi.org/10.3390/biomimetics8010127
Chicago/Turabian StyleMutlu, Rahim, Dilpreet Singh, Charbel Tawk, and Emre Sariyildiz. 2023. "A 3D-Printed Soft Haptic Device with Built-in Force Sensing Delivering Bio-Mimicked Feedback" Biomimetics 8, no. 1: 127. https://doi.org/10.3390/biomimetics8010127
APA StyleMutlu, R., Singh, D., Tawk, C., & Sariyildiz, E. (2023). A 3D-Printed Soft Haptic Device with Built-in Force Sensing Delivering Bio-Mimicked Feedback. Biomimetics, 8(1), 127. https://doi.org/10.3390/biomimetics8010127