
A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control


Abstract
:1. Introduction
2. Problem Formulation and Assumptions
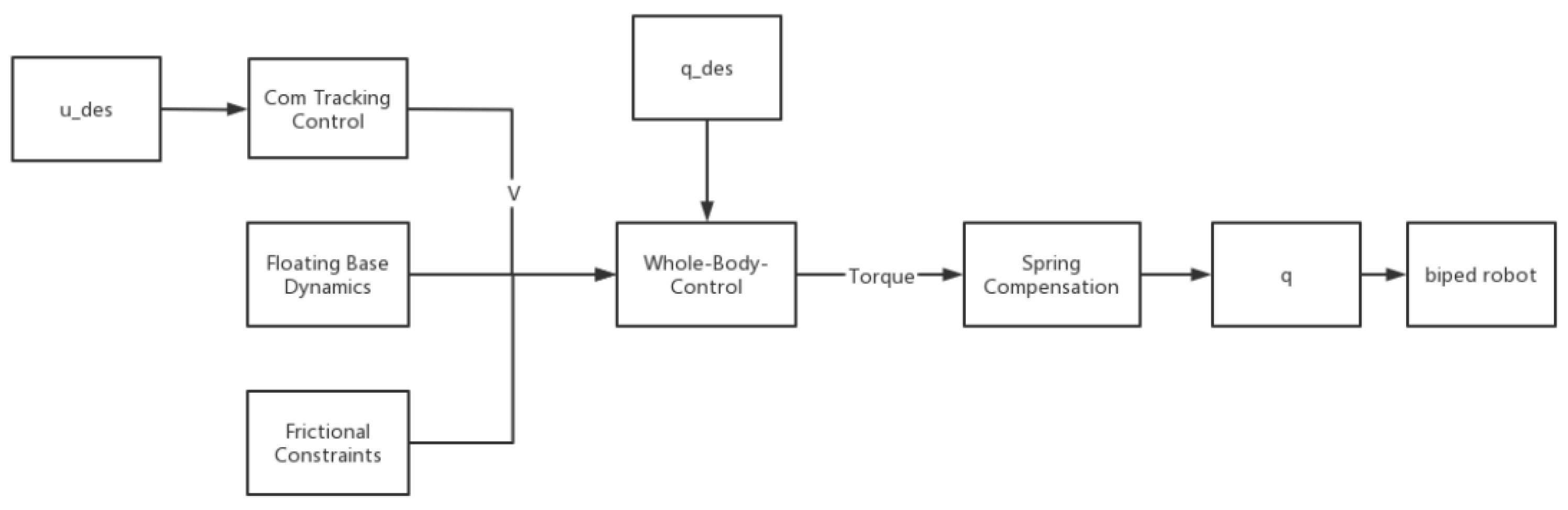
3. Com Tracking Control
4. Spring Compensation Modeling
4.1. Floating Base Dynamics Function
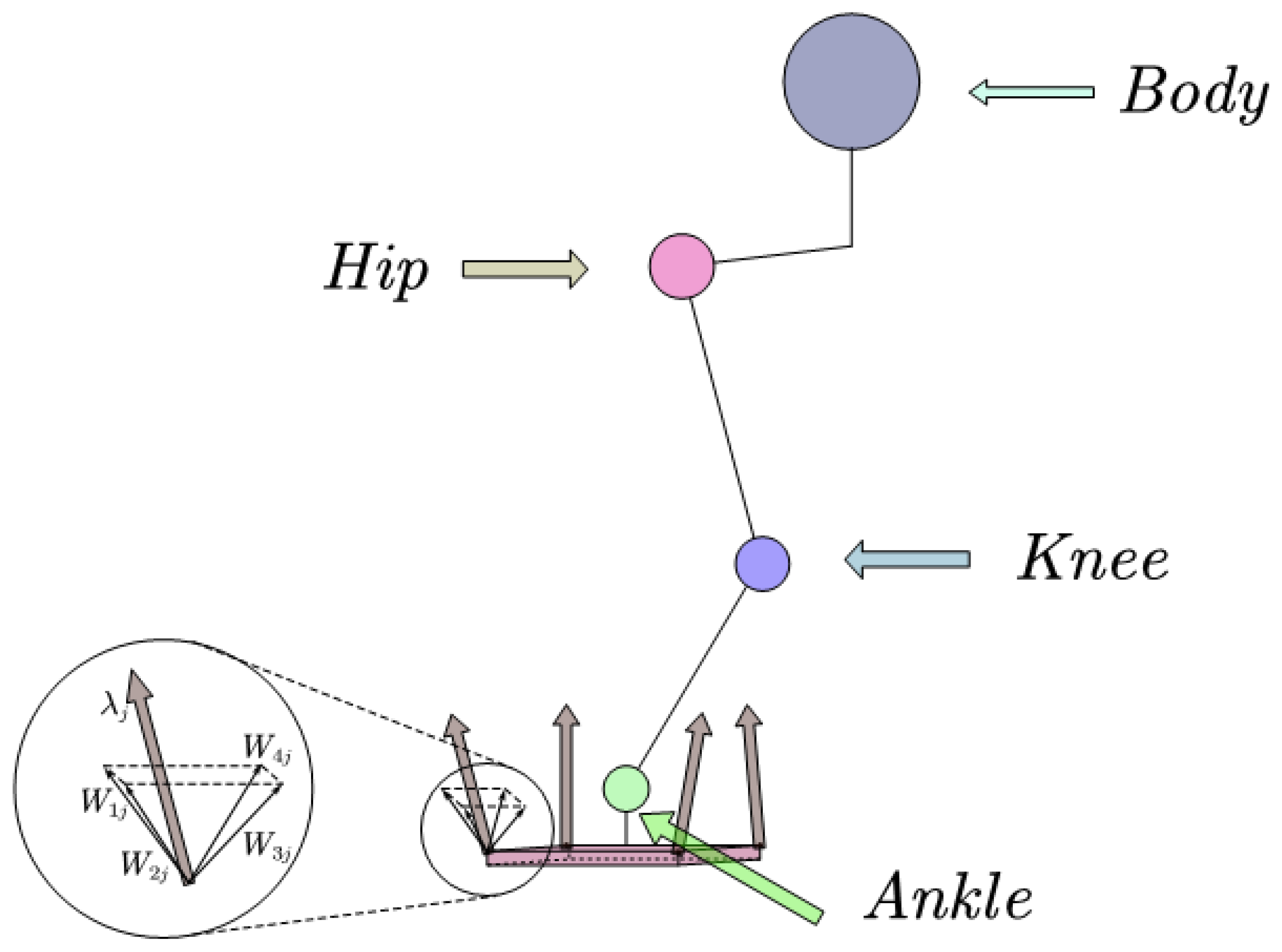
4.2. Frictional Constraints
4.3. Calculation of Joint Torque
4.4. The Spring Compensation
5. Results and Discussions
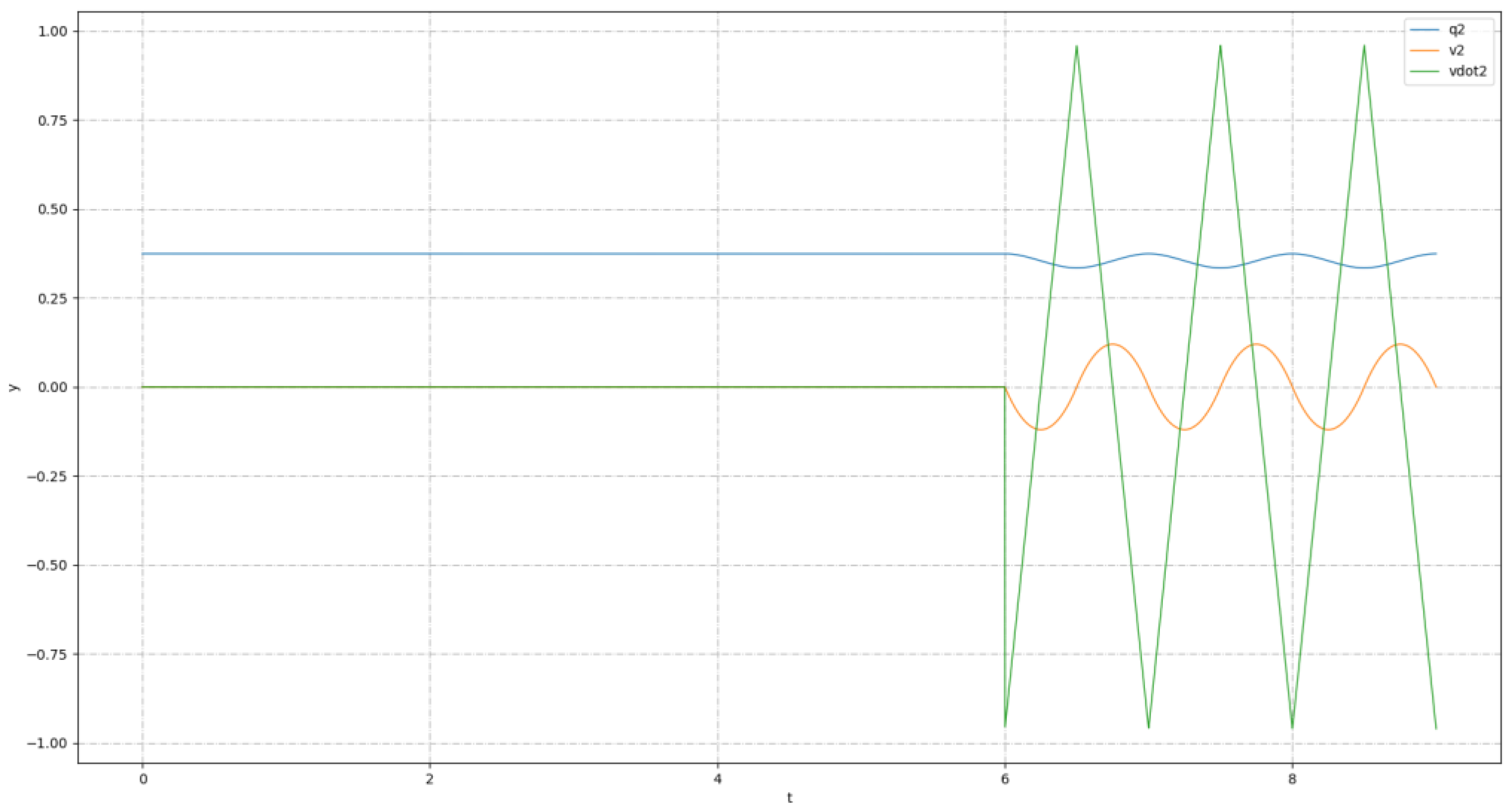
5.1. Trajectory
5.2. Elastic Coefficient
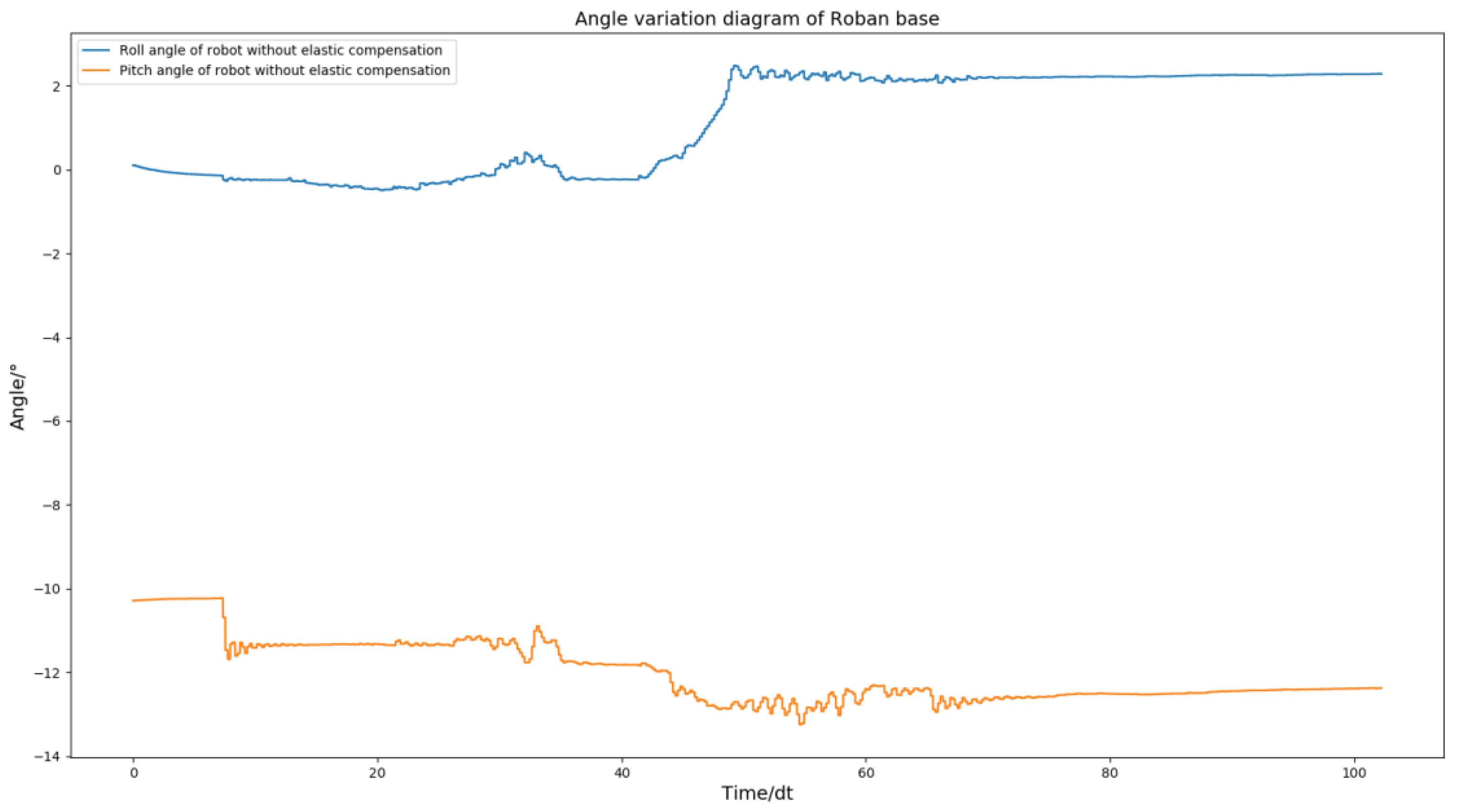
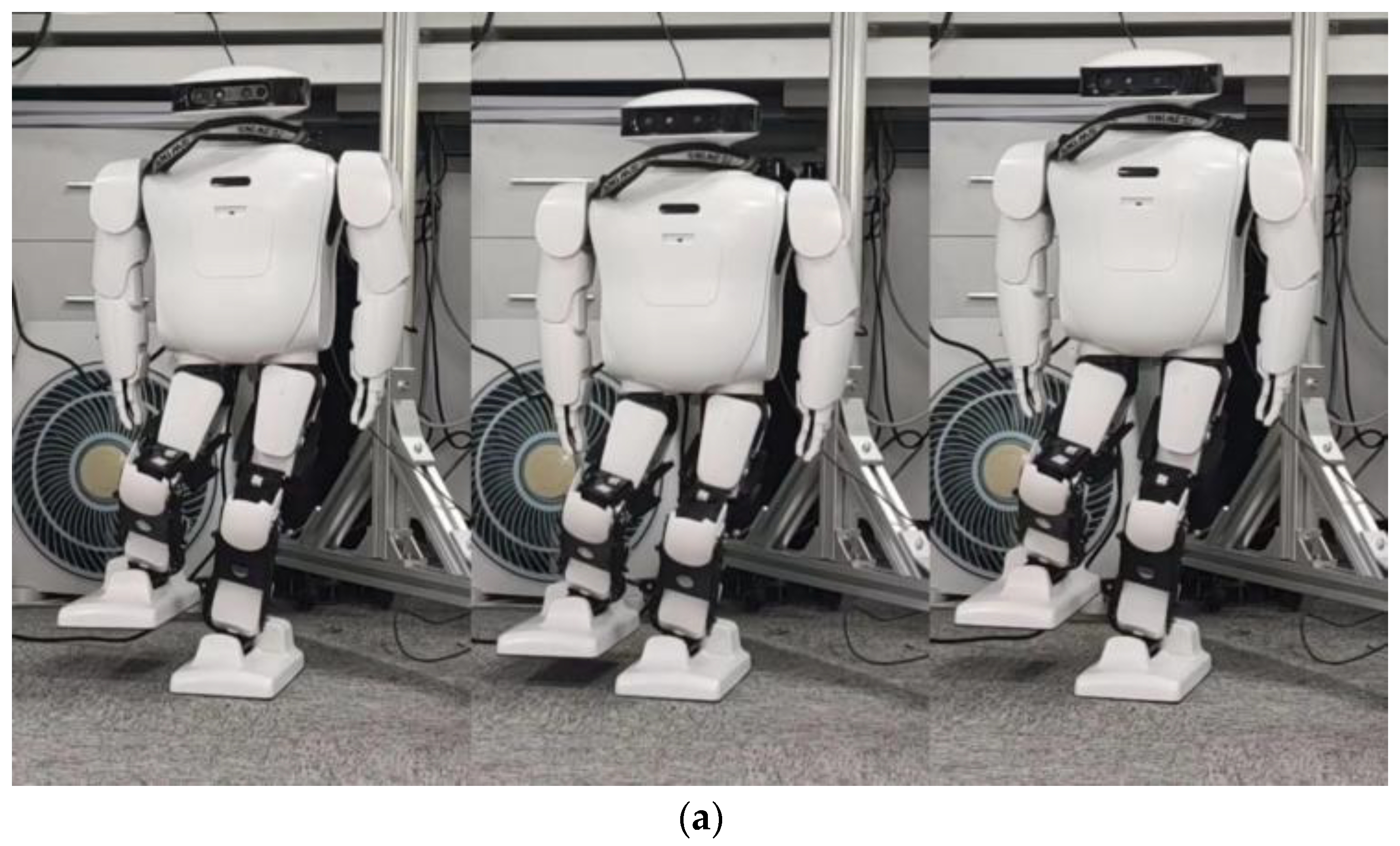
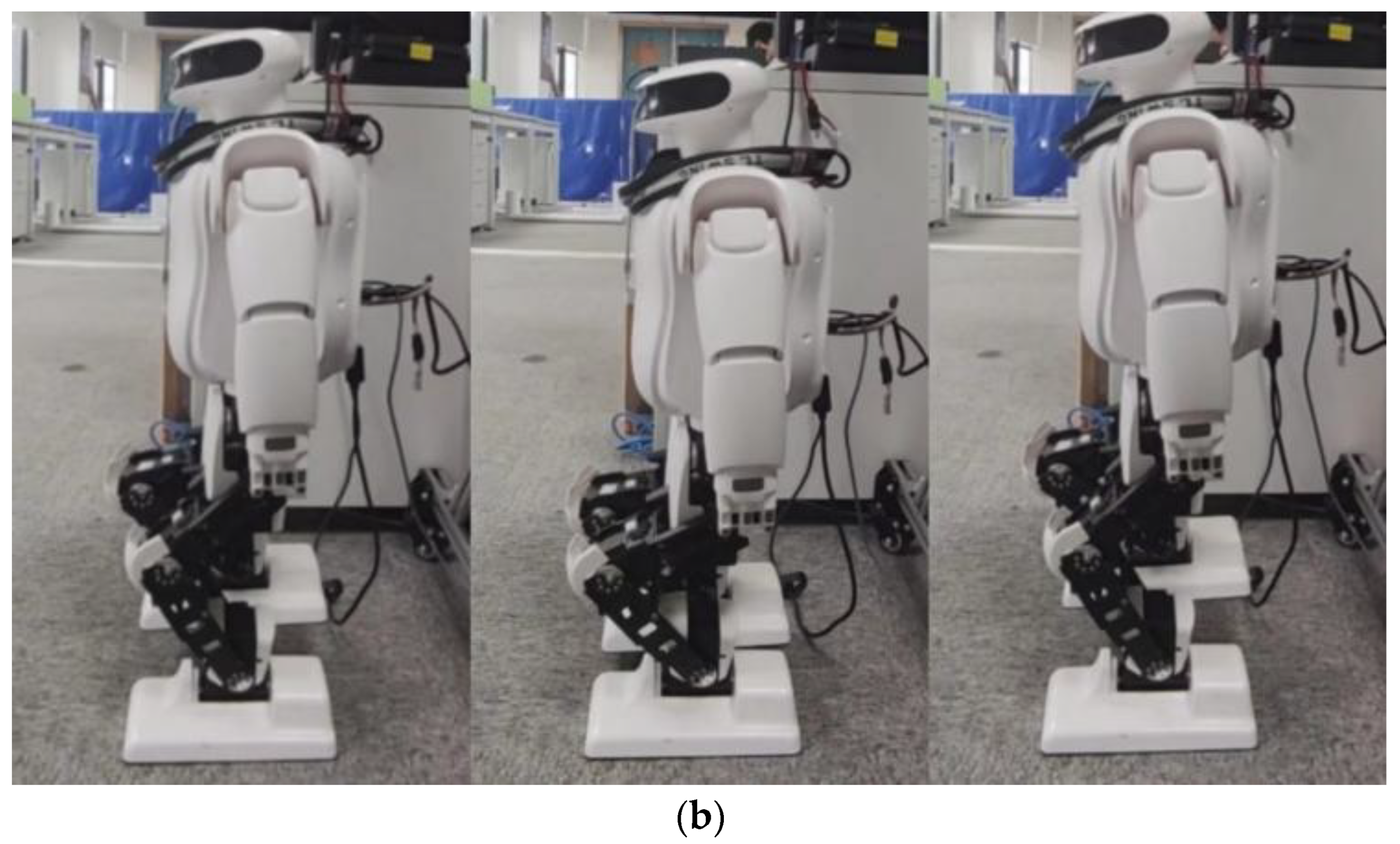
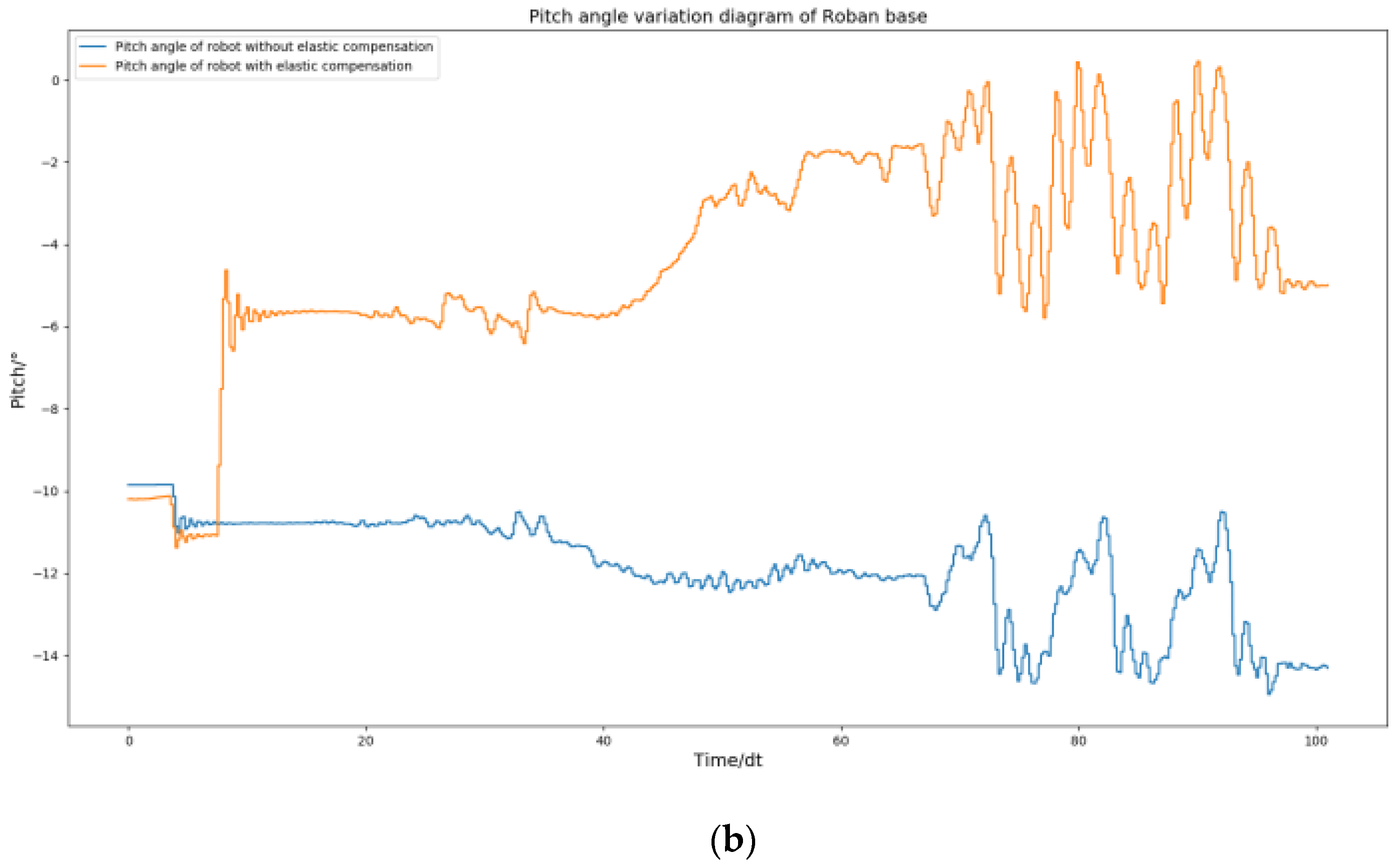
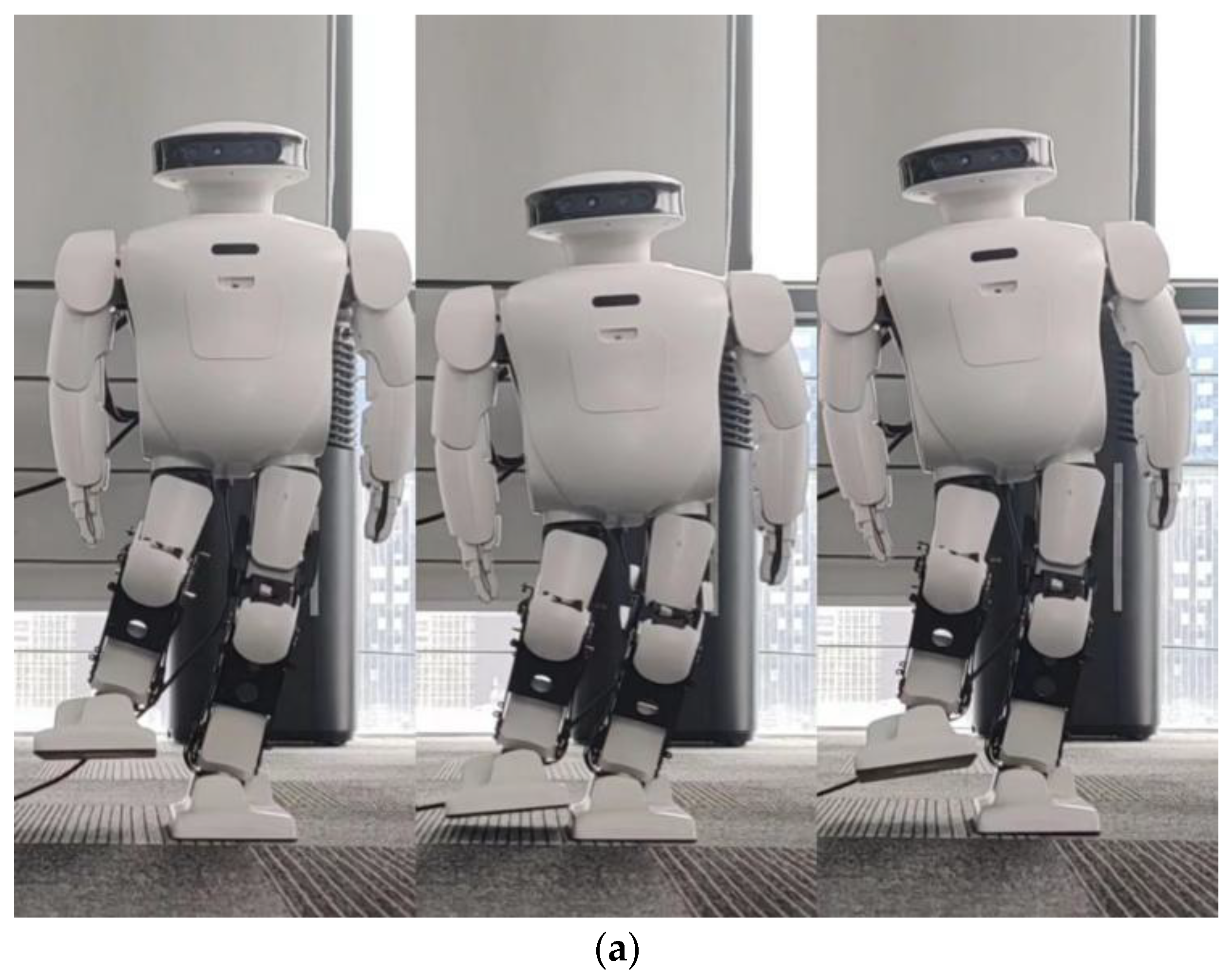
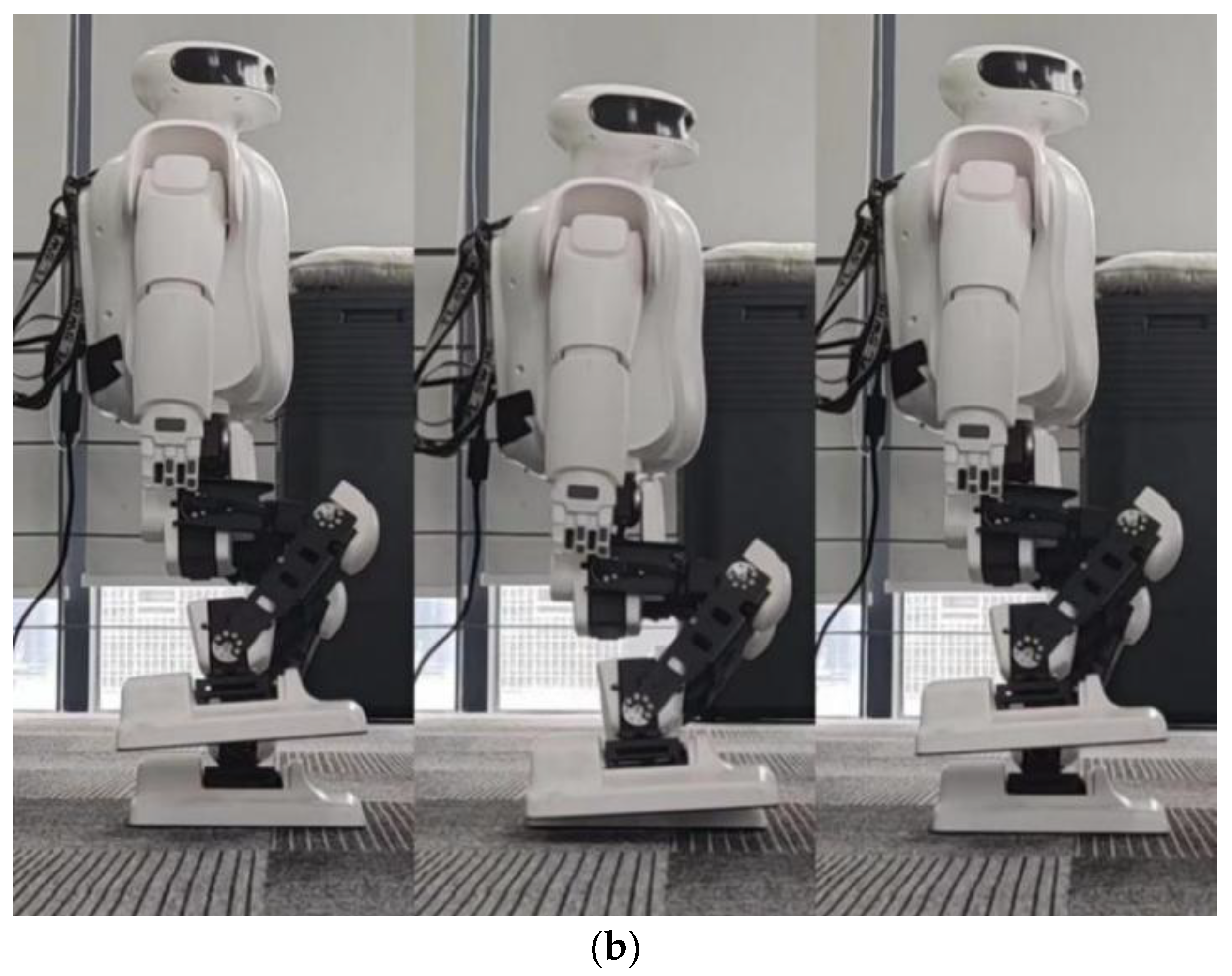
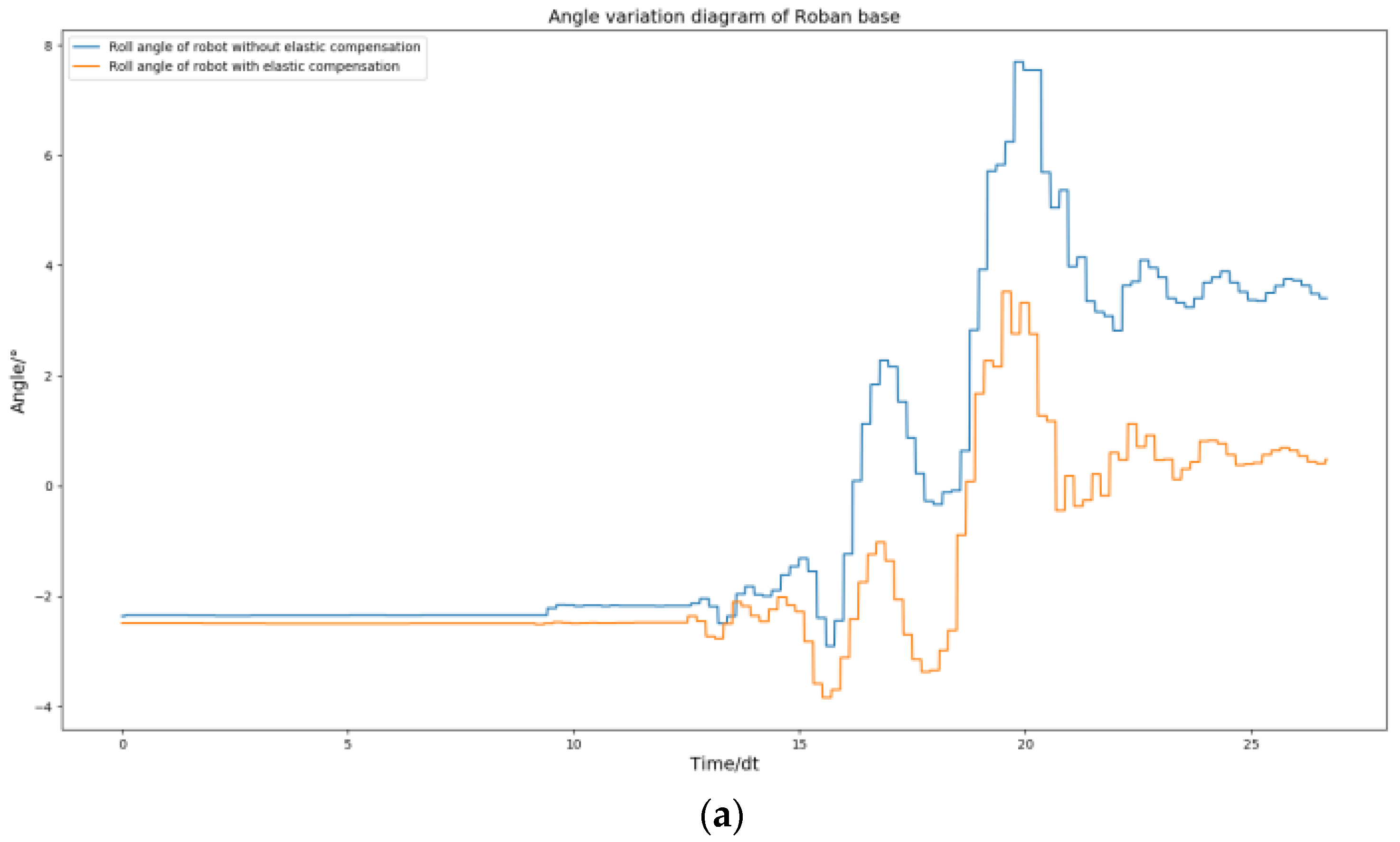
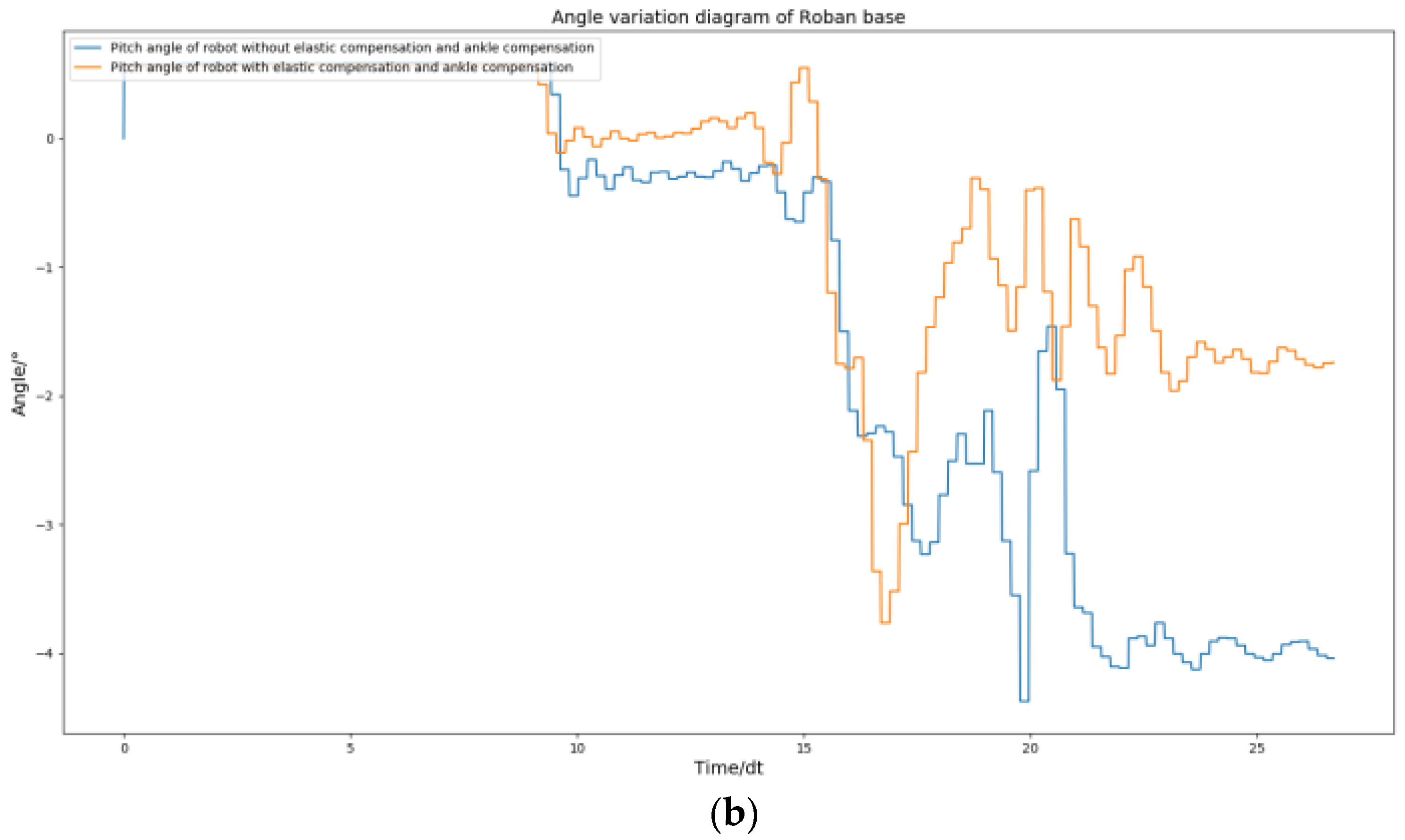
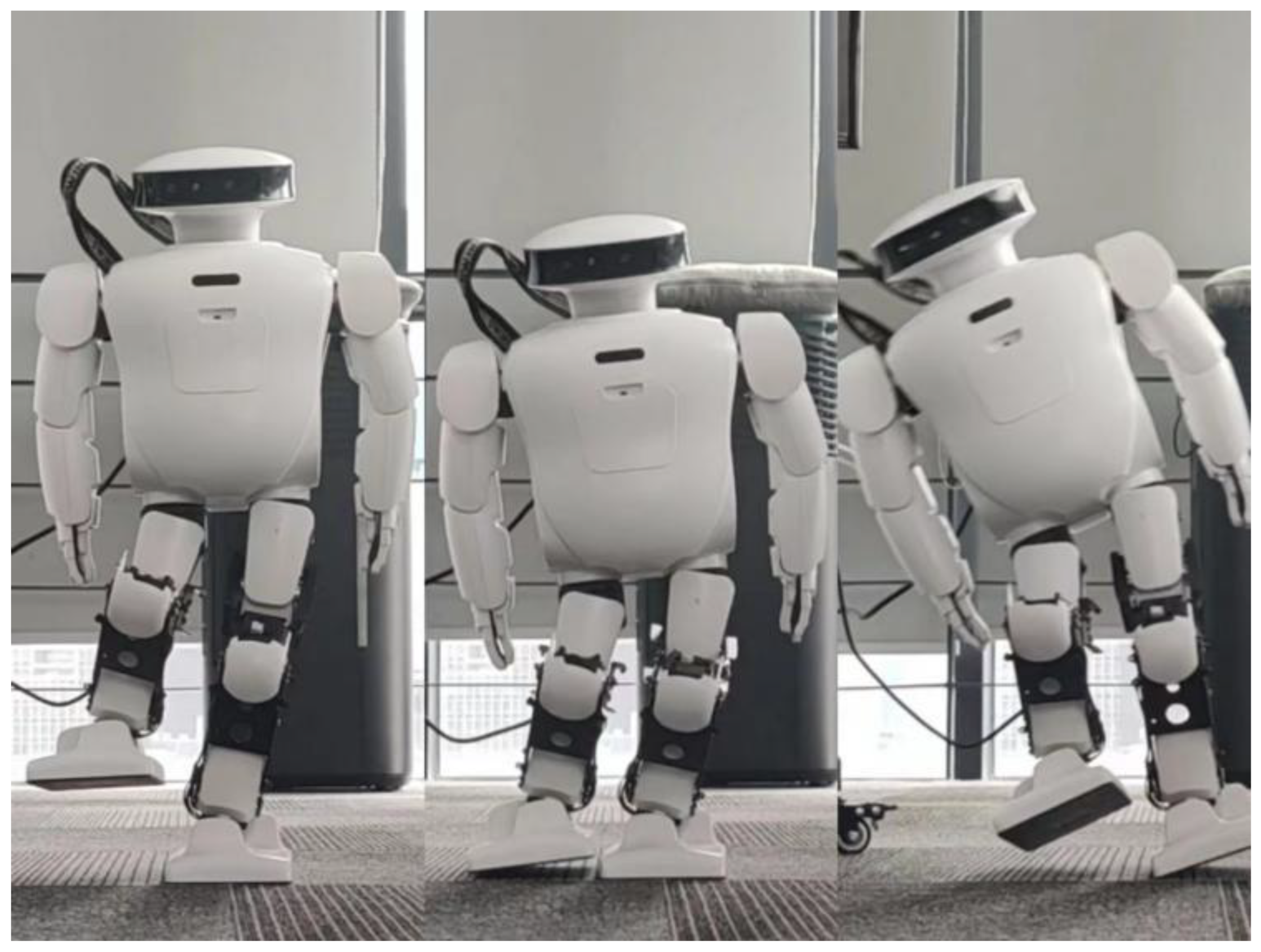
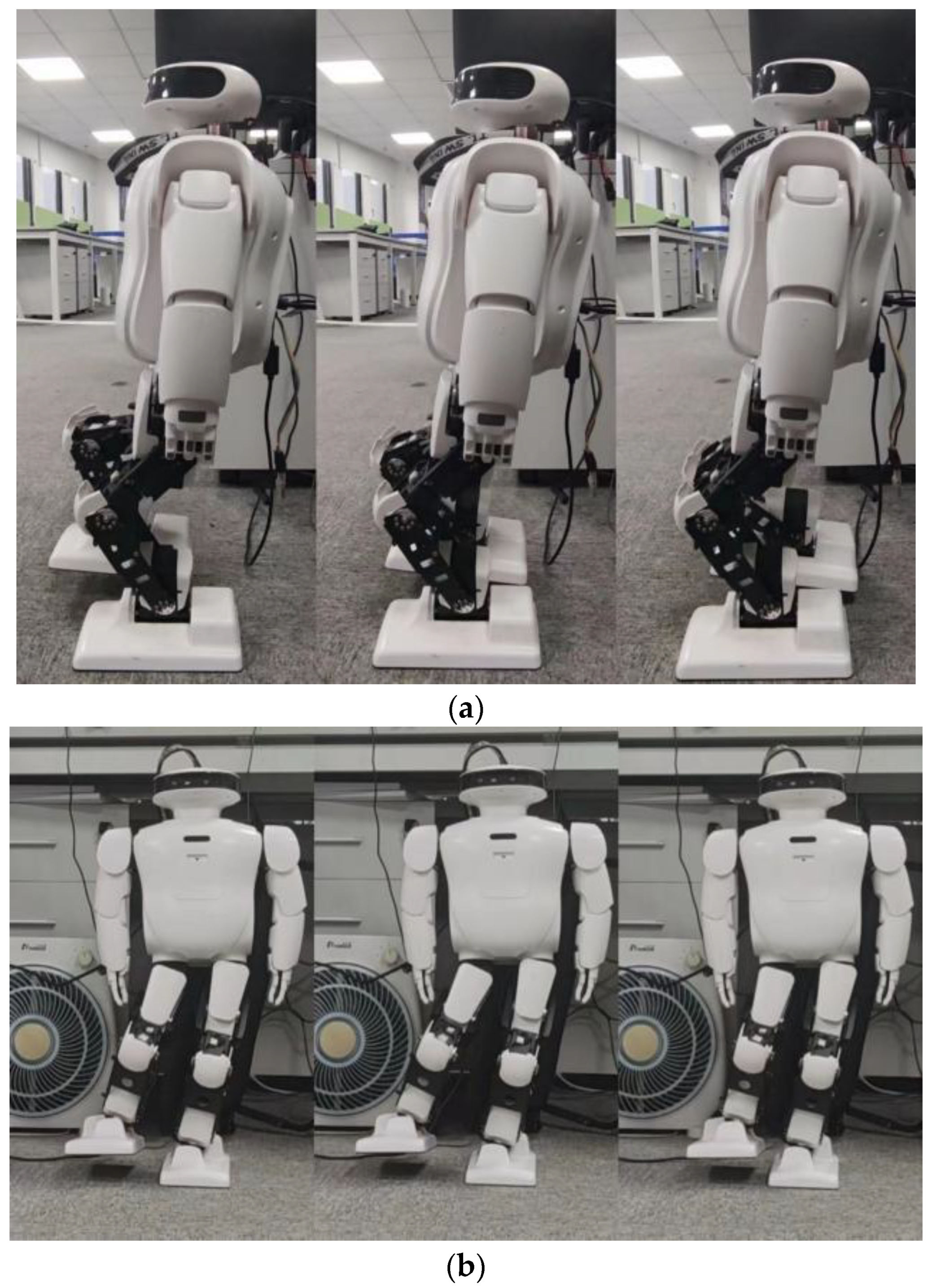
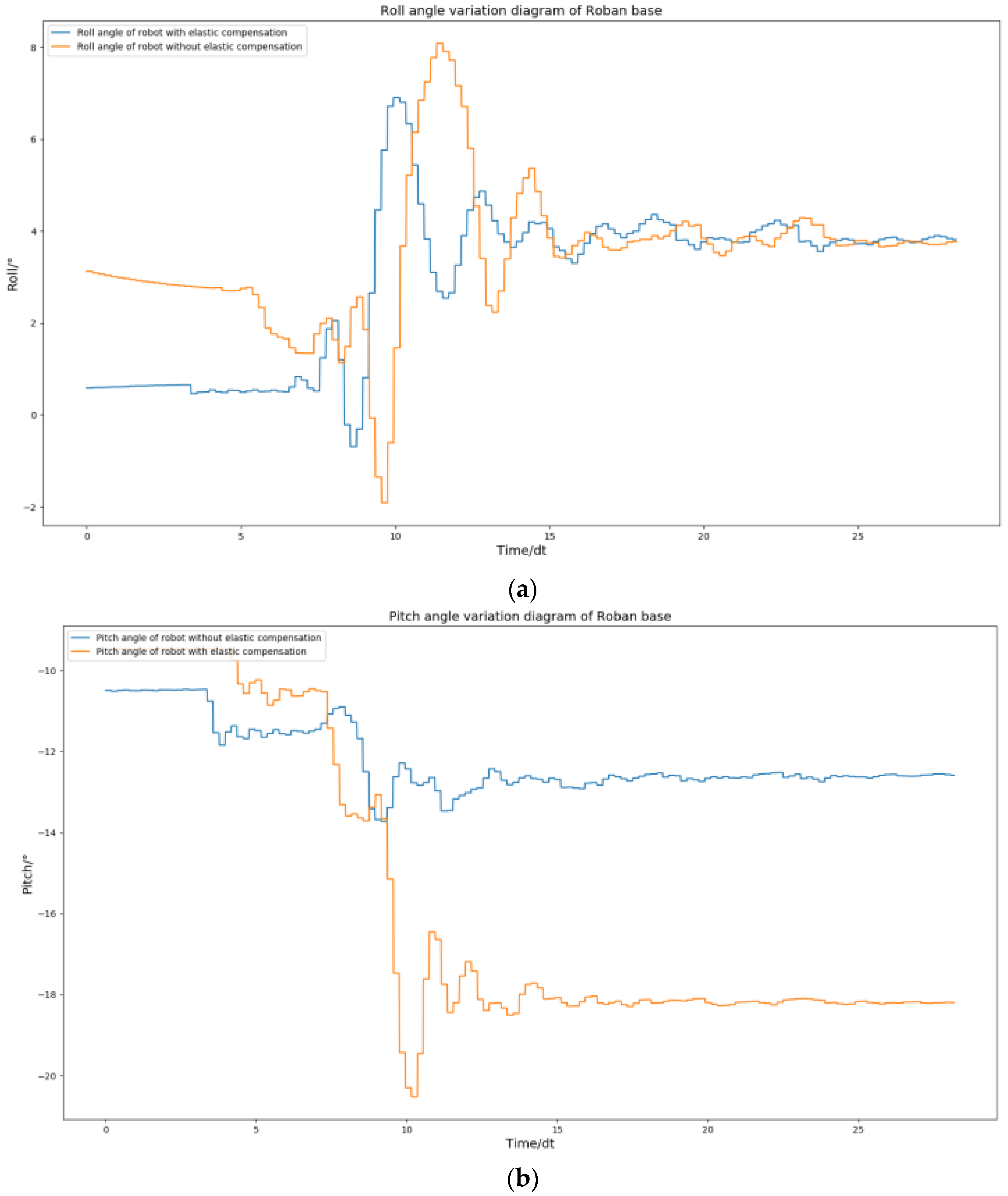
5.3. Squat Experiment
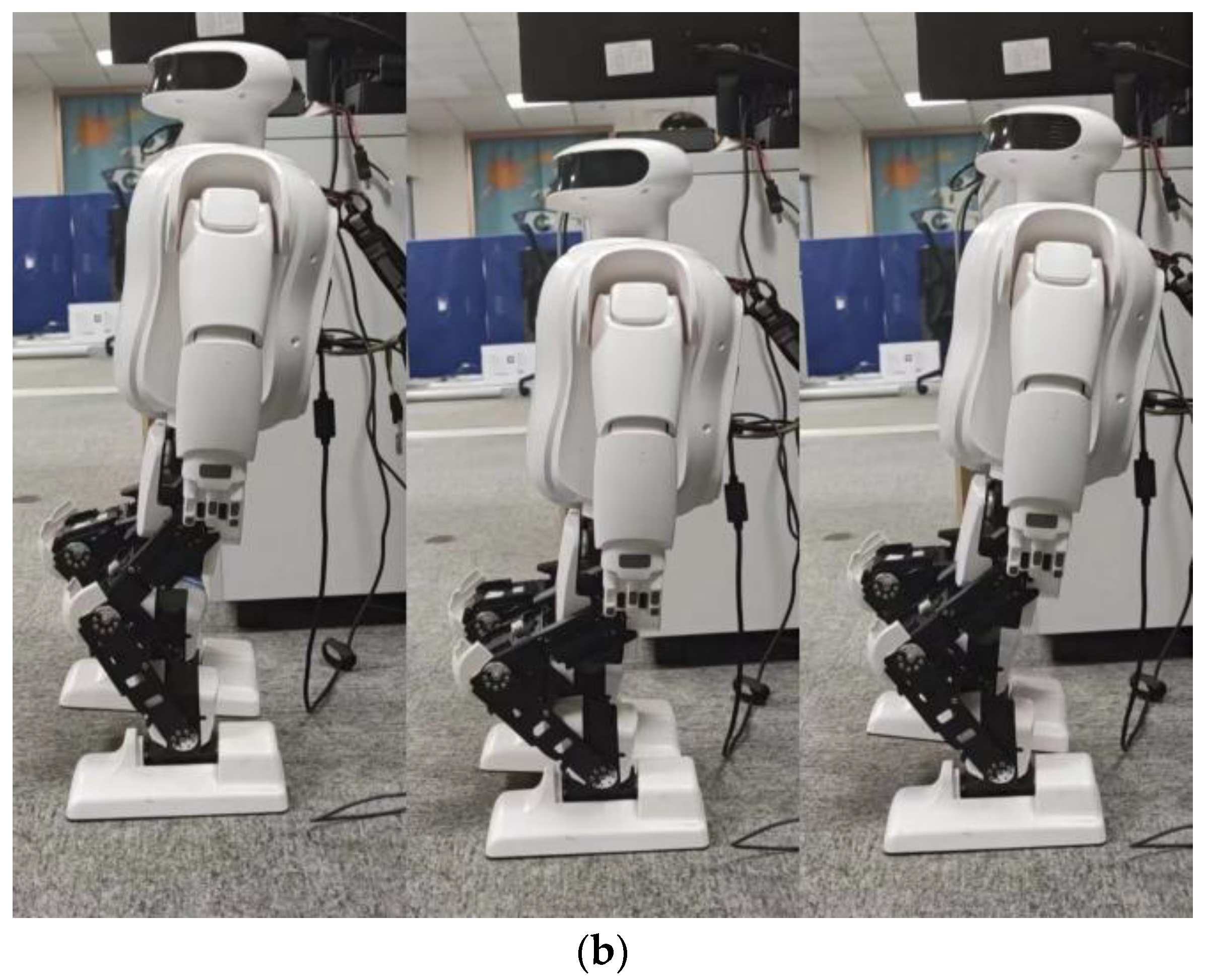
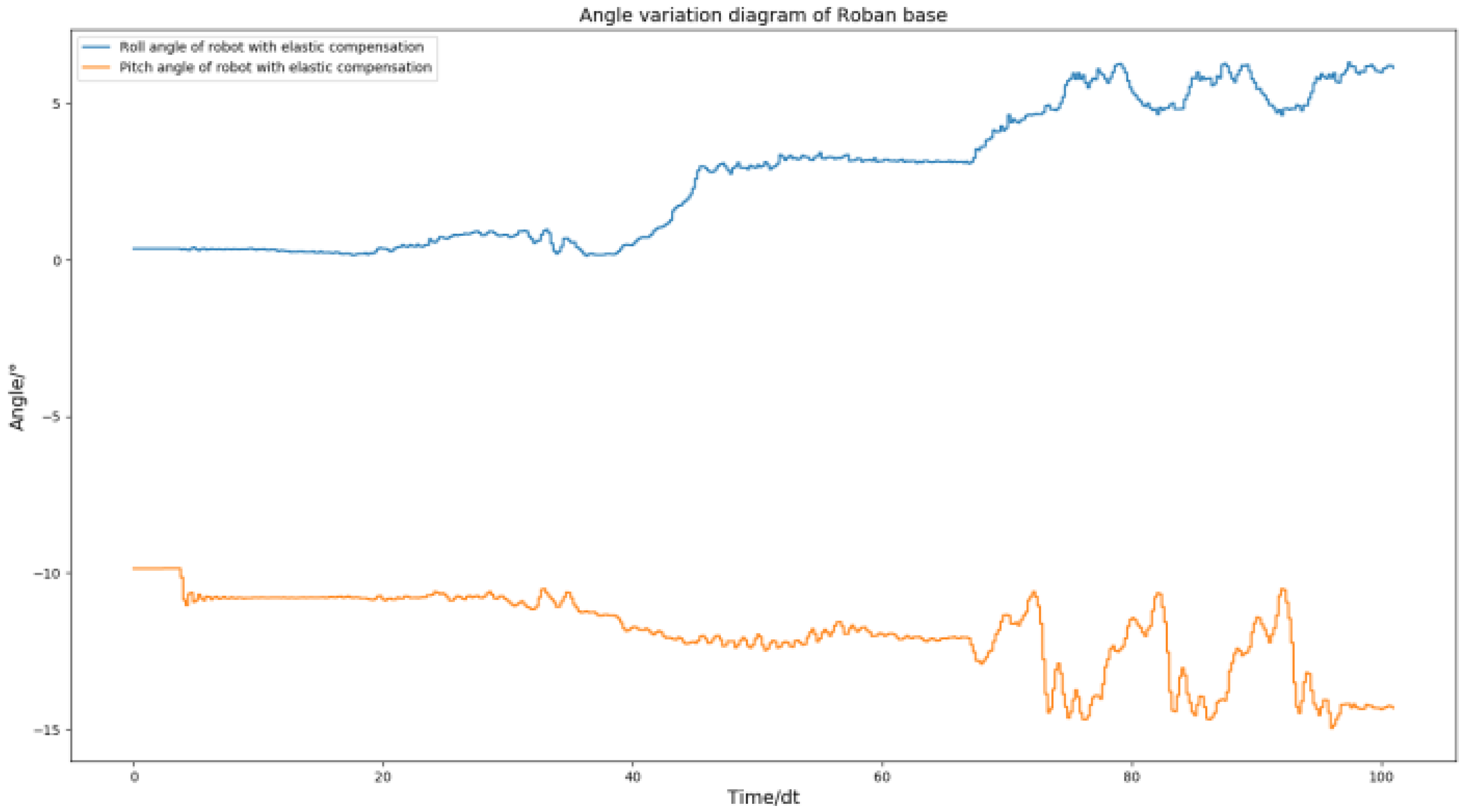
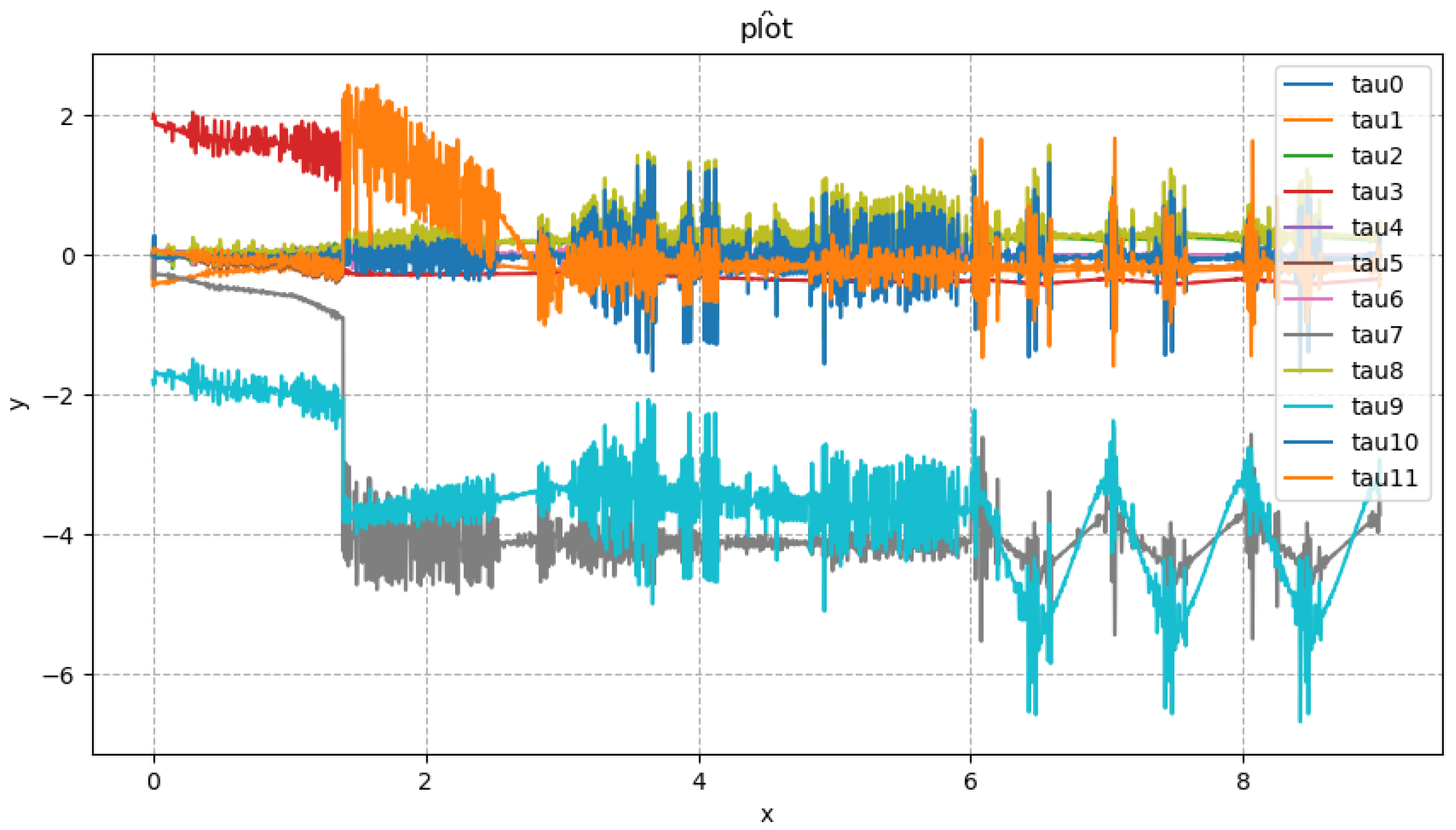
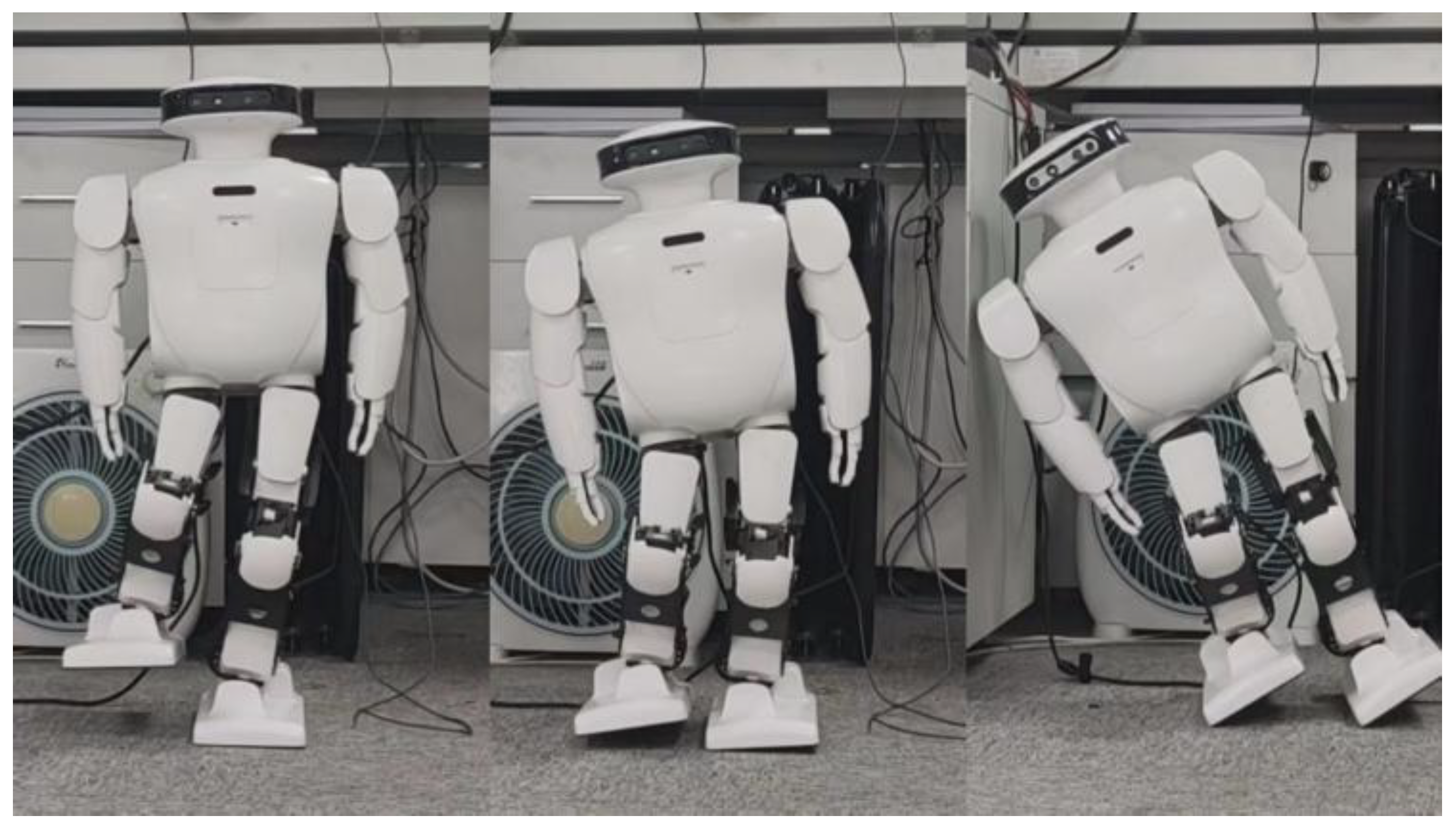
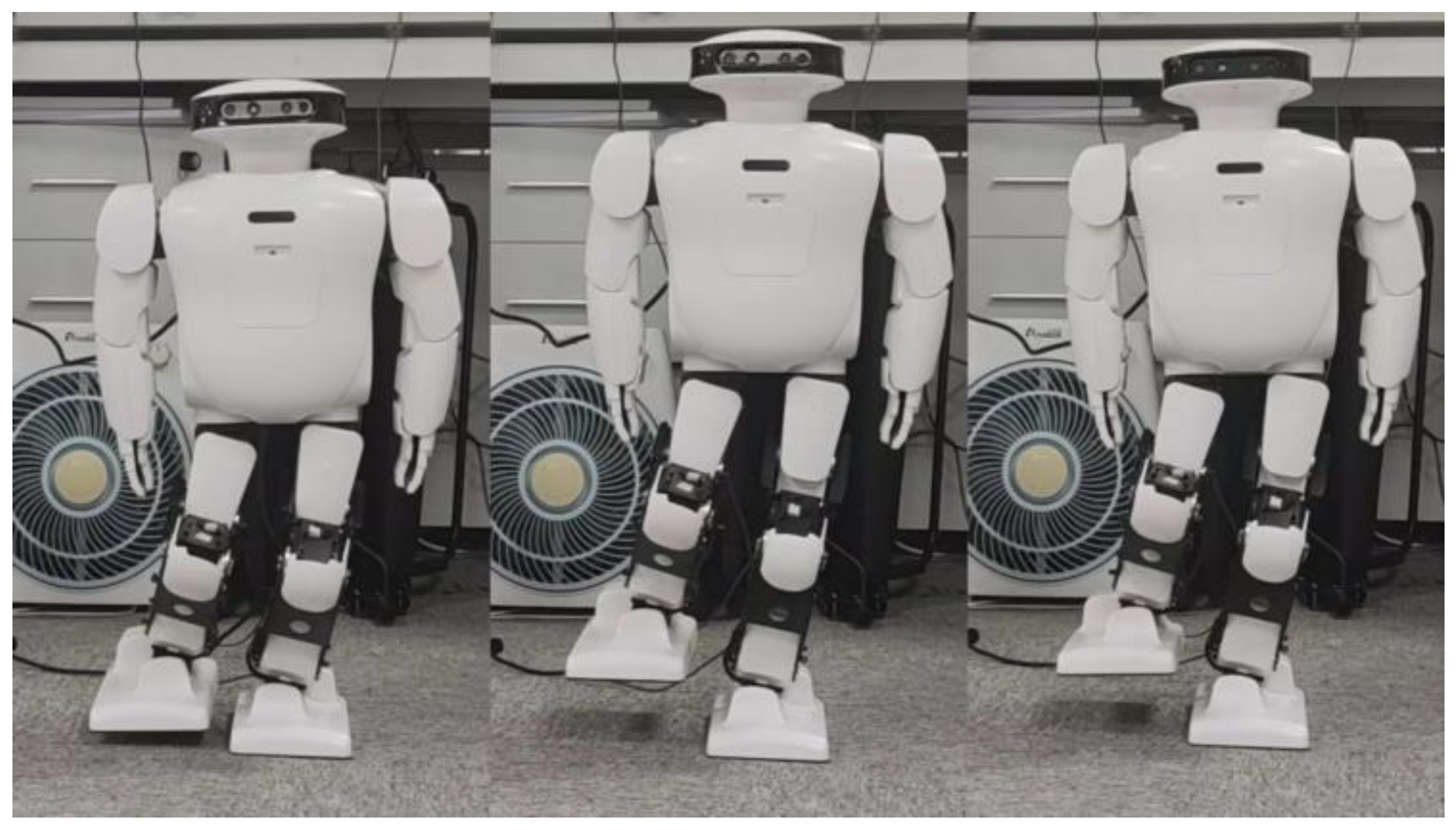
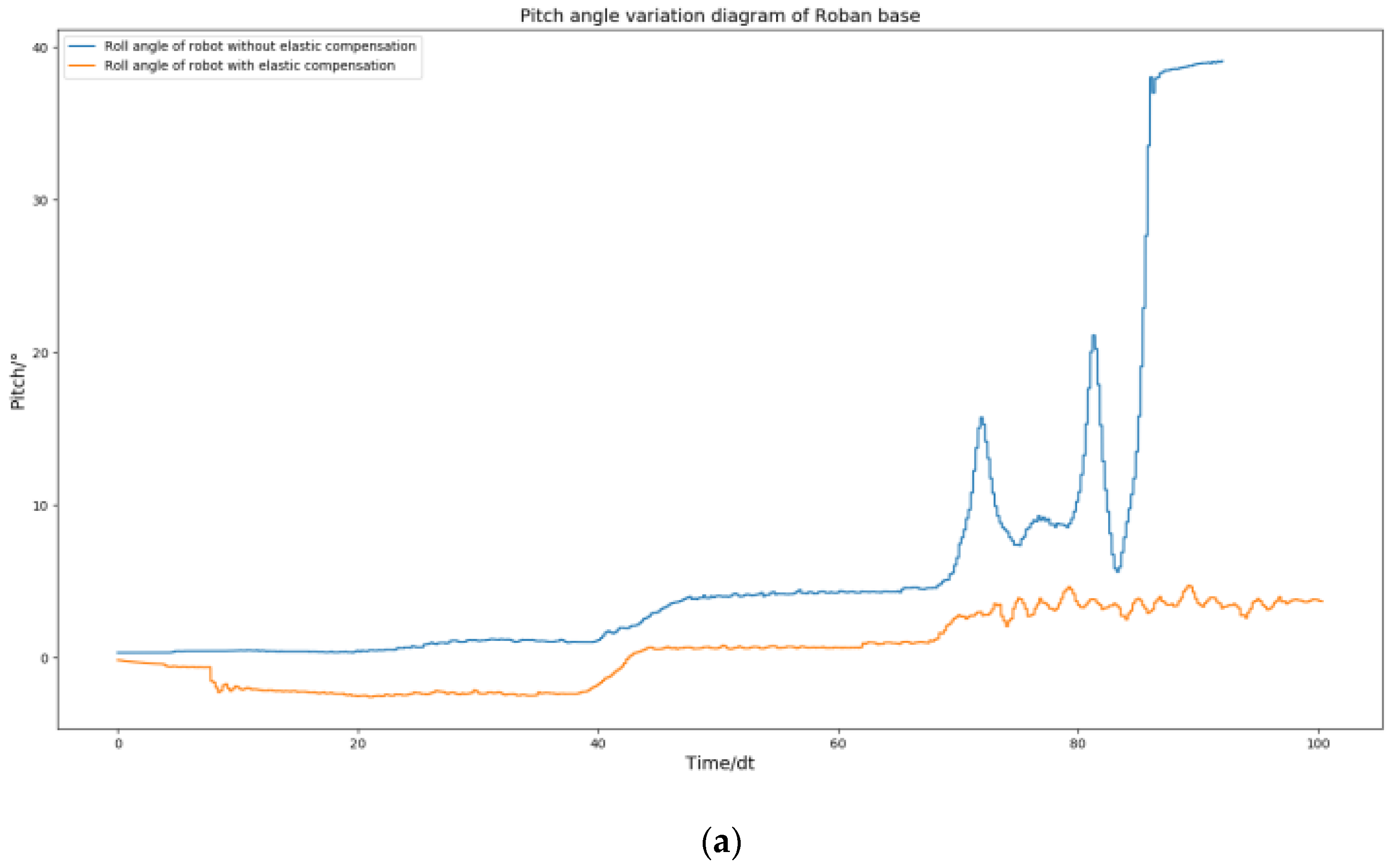
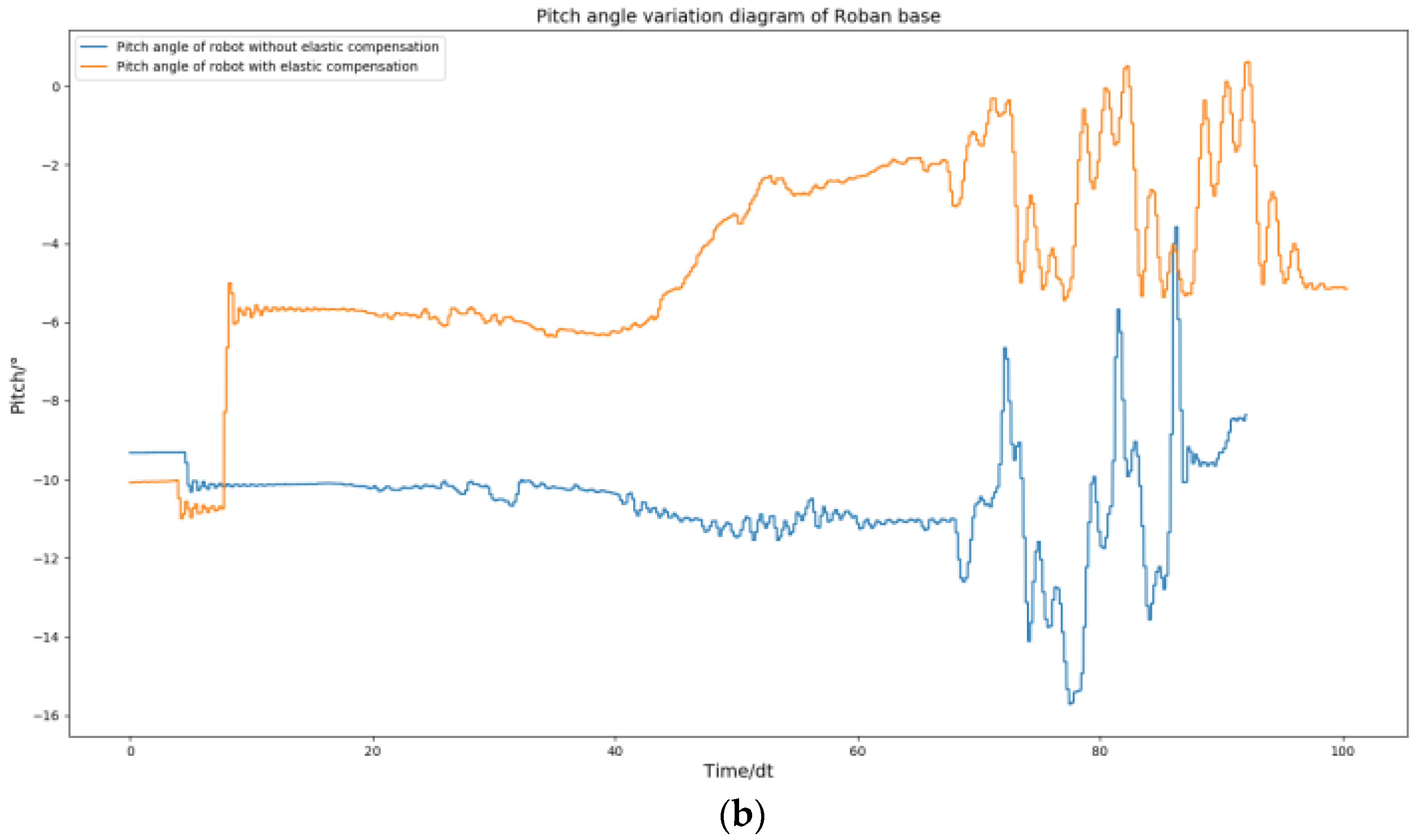
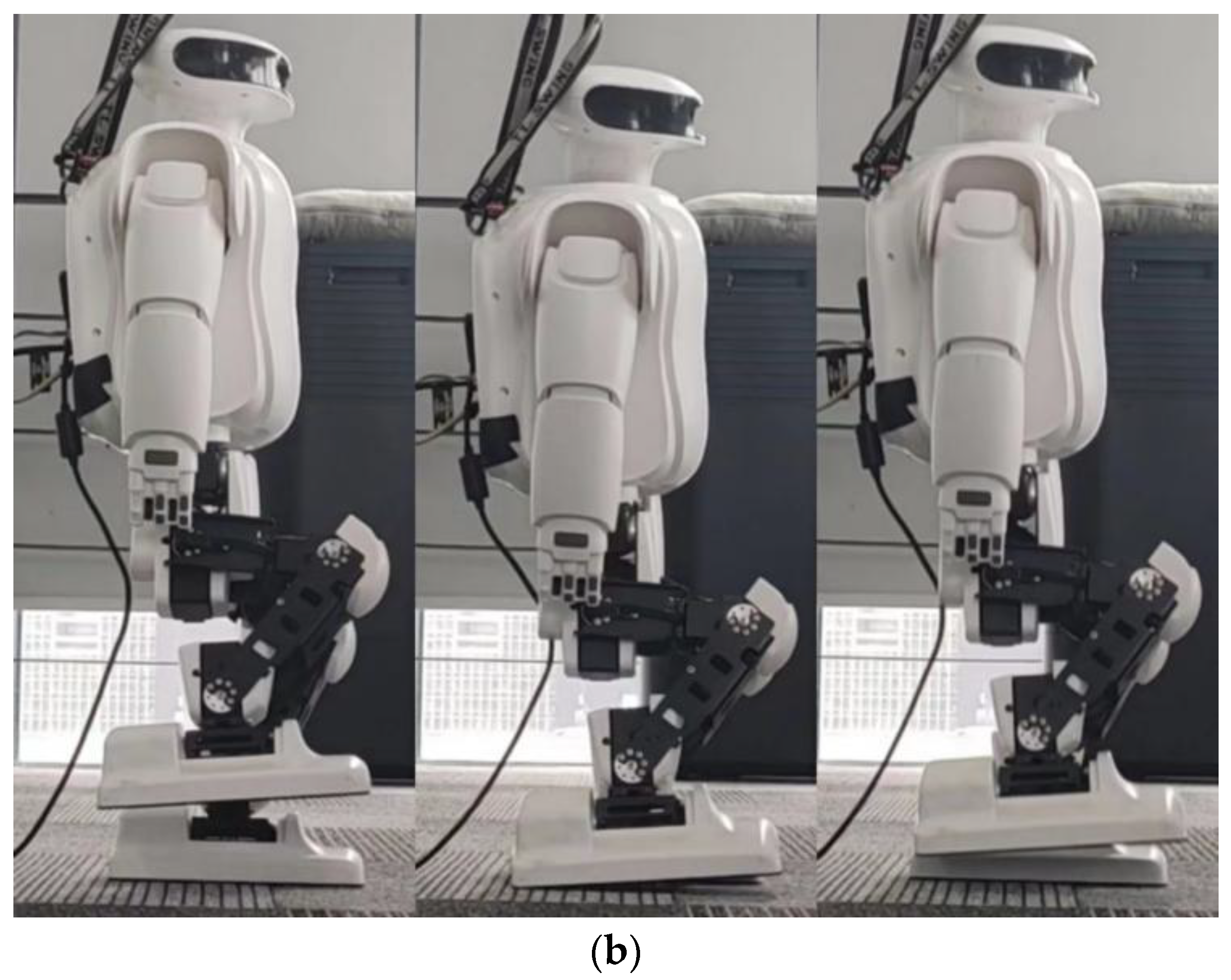
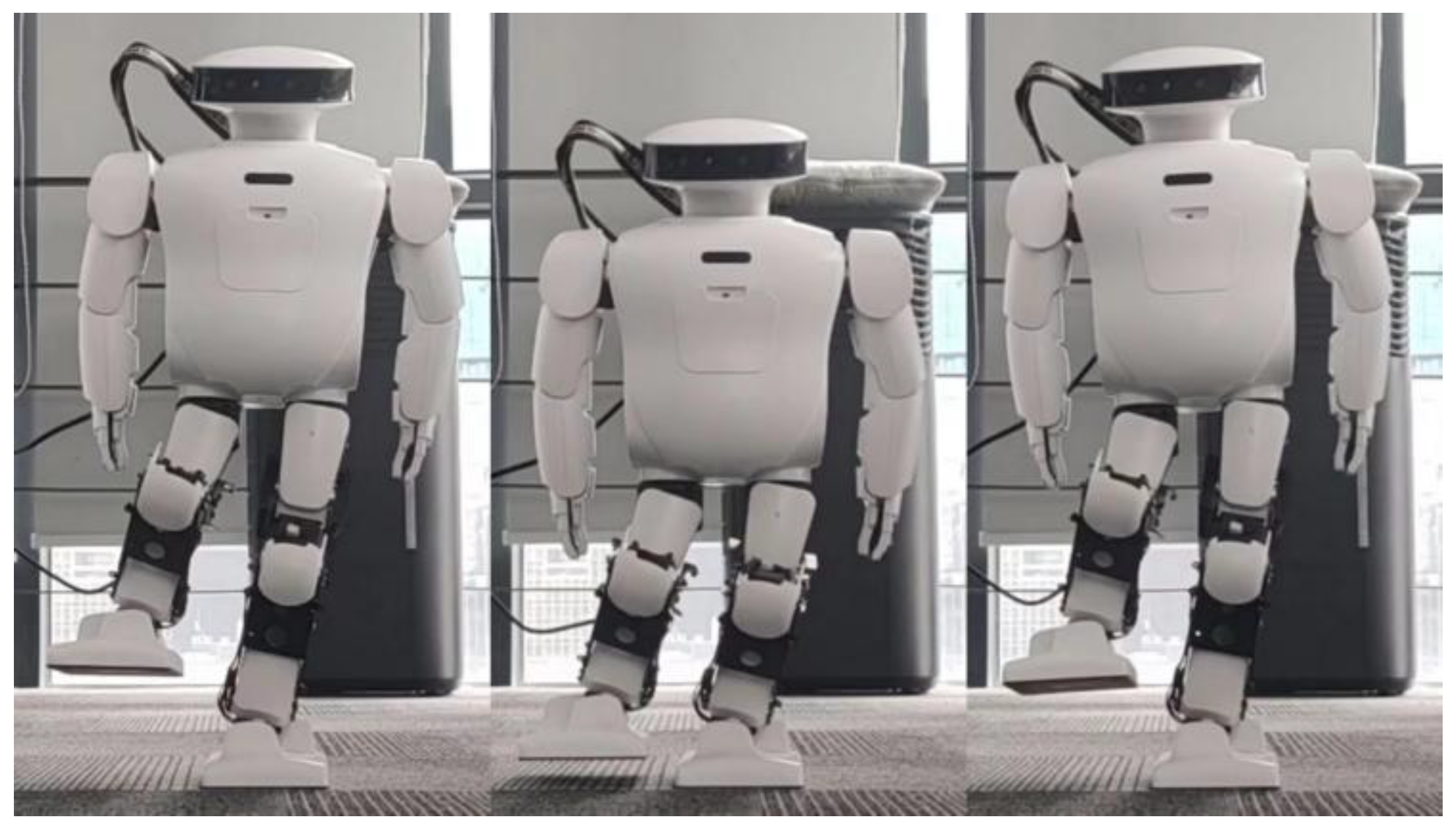
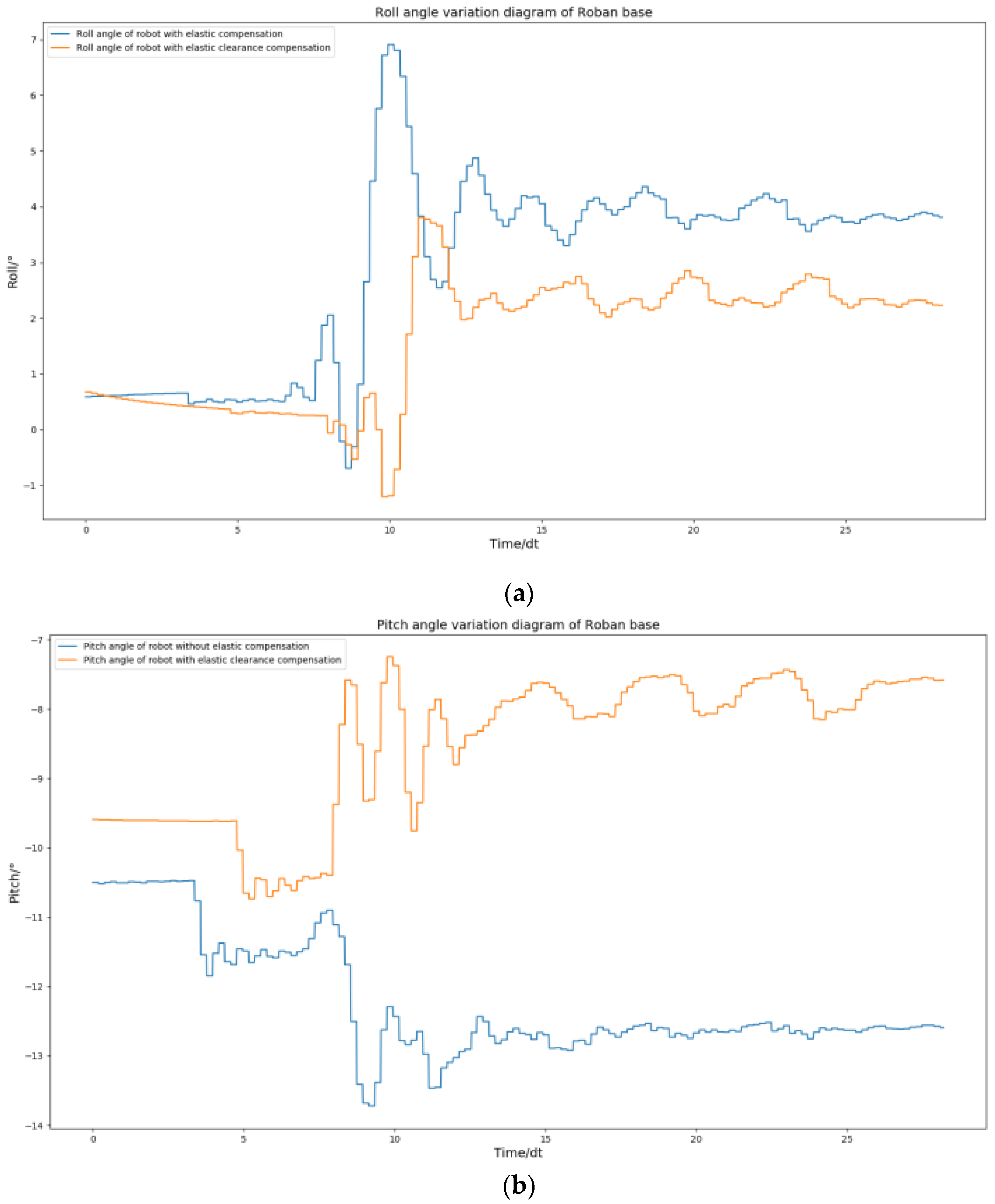
5.4. Swing Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1620–1626. [Google Scholar]
- Englsberger, J.; Ott, C.; Albu-Schaffer, A. Three-dimensional bipedal walking control using Divergent Component of Motion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2600–2607. [Google Scholar] [CrossRef] [Green Version]
- Kajita, S.; Benallegue, M.; Cisneros, R.; Sakaguchi, T.; Nakaoka, S.I.; Morisawa, M.; Kaneko, K.; Kanehiro, F. Biped walking pattern generation based on spatially quantized dynamics. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 599–605. [Google Scholar]
- Kajita, S.; Benallegue, M.; Cisneros, R.; Sakaguchi, T.; Morisawa, M.; Kaminaga, H.; Kumagai, I.; Kaneko, K.; Kanehiro, F. Position-Based Lateral Balance Control for Knee-Stretched Biped Robot. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019; pp. 17–24. [Google Scholar]
- Onishi, Y.; Kajita, S.; Ibuki, T.; Sampei, M. Knee-stretched Biped Gait Generation along Spatially Quantized Curves. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5120–5127. [Google Scholar]
- Guan, K.; Yamamoto, K.; Nakamura, Y. Virtual-mass-ellipsoid Inverted Pendulum Model and Its Applications to 3D Bipedal Locomotion on Uneven Terrains. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1401–1406. [Google Scholar] [CrossRef]
- Poulakakis, I.; Grizzle, J.W. The Spring Loaded Inverted Pendulum as the Hybrid Zero Dynamics of an Asymmetric Hopper. IEEE Trans. Autom. Control 2009, 54, 1779–1793. [Google Scholar] [CrossRef] [Green Version]
- Qin, G.; Ji, A.; Cheng, Y.; Zhao, W.; Pan, H.; Shi, S.; Song, Y. Position error compensation of the multi-purpose overload robot in nuclear power plants. Nucl. Eng. Technol. 2021, 53, 2703–2715. [Google Scholar] [CrossRef]
- Xu, Y.; Paul, R. On position compensation and force control stability of a robot with a compliant wrist. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; Volume 2, pp. 1173–1178. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, H.; Fuhlbrigge, T. Improving machining accuracy with robot deformation compensation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 3826–3831. [Google Scholar]
- Xue, R.; Ren, B.; Yan, Z.; Du, Z. A cable-pulley system modeling based position compensation control for a laparoscope surgical robot. Mech. Mach. Theory 2017, 118, 283–299. [Google Scholar] [CrossRef]
- Lischinsky, P.; Canudas-De-Wit, C.; Morel, G. Friction compensation for an industrial hydraulic robot. IEEE Control Syst. 1999, 19, 25–32. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Li, J.; Sun, H.; Guo, X.; Xuan, B.; Ma, L.; Xu, Y.; Ma, T.; Ding, Q.; An, B. Study on the Modeling and Compensation Method of Pose Error Analysis for the Fracture Reduction Robot. Micromachines 2022, 13, 1186. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.-N.; Le, P.-N.; Kang, H.-J. A new calibration method for enhancing robot position accuracy by combining a robot model–based identification approach and an artificial neural network–based error compensation technique. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef] [Green Version]
- Fines, J.M.; Agah, A. Machine tool positioning error compensation using artificial neural networks. Eng. Appl. Artif. Intell. 2008, 21, 1013–1026. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Tian, W.; Zhang, C.; Hua, F.; Cui, G.; Li, Y. Positioning error compensation of an industrial robot using neural networks and experimental study. Chin. J. Aeronaut. 2022, 35, 346–360. [Google Scholar] [CrossRef]
- Wen, S.; Zha, Y.; Yu, H.; Manfredi, L.; Li, X.; Wang, S. Fuzzy Neural Network algorithm based on the delay compensation force/position control structure of a redundant actuation parallel robot. In Proceedings of the 2019 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 21–22 August 2019; pp. 142–147. [Google Scholar] [CrossRef]
- Ye, C.; Yang, J.; Ding, H. High-accuracy prediction and compensation of industrial robot stiffness deformation. Int. J. Mech. Sci. 2022, 233, 107638. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Liu, J. Humanoid Robot Walking Planning in Complex Environment; University of Science and Technology of China: Hefei, China, 2010. (In Chinese) [Google Scholar]
- Kuindersma, S.; Permenter, F.; Tedrake, R. An efficiently solvable quadratic program for stabilizing dynamic locomotion. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA); 2014; pp. 2589–2594. [Google Scholar] [CrossRef] [Green Version]
- Pollard, N.S.; Reitsma, P.S. Animation of humanlike characters: Dynamic motion filtering with a physically plausible contact model. In Proceedings of the 11th Yale Workshop on Adaptive and Learning Systems, New Haven, CT, USA, 10–12 June 2001; Volume 2. [Google Scholar]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robot. 2015, 40, 429–455. [Google Scholar] [CrossRef]
- Scheinberg, K.; Bennett, K.P.; Parrado-Hernández, E. An efficient implementation of an active set method for SVMs. J. Mach. Learn. Res. 2006, 7, 2237–2257. [Google Scholar]
- Pólik, I.; Terlaky, T. Interior point methods for nonlinear optimization. In Nonlinear Optimization; Springer: Berlin/Heidelberg, Germany, 2010; pp. 215–276. [Google Scholar]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar]
- Drake: A Planning, Control, and Analysis Toolbox for Nonlinear Dynamical Systems. September 2013. Available online: http://drake.mit.edu (accessed on 1 November 2022).





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DOF | 22 |
|---|---|
| Single leg DOF | 6 |
| Entire robot mass/kg | 6.6 |
| Entire robot height/cm | 70 |
| Number | q/° | τ/N·m | k | |
|---|---|---|---|---|
| 1 | −0.00026 | −0.23438 | −0.00197 | −118.74 |
| 2 | 0.6226 | 0.15625 | −0.36474 | −1.28 |
| 3 | −37.9075 | −36.6406 | 0.01779 | −71.21 |
| 4 | 68.7407 | 71.6406 | −1.86625 | 1.55 |
| 5 | −30.8239 | −28.9844 | 0.00371 | −495.82 |
| 6 | −0.6245 | −1.40625 | 0.01724 | 45.36 |
| 7 | 0.00017 | 0.23438 | 0.00198 | −118.29 |
| 8 | −0.60888 | −0.46874 | −0.39568 | 0.35 |
| 9 | −37.9126 | −37.1875 | −0.004 | 181.28 |
| 10 | 68.7484 | 71.4062 | 1.88342 | −1.41 |
| 11 | −30.8266 | −29.375 | 0.02008 | −722.91 |
| 12 | 0.60647 | 1.0156 | −0.01592 | 25.70 |
| Number | k |
|---|---|
| 2 | −4 |
| 3 | −650 |
| 8 | 20 |
| 9 | −1200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Kou, L.; Ke, W.; Chen, Y.; Bai, Y.; Li, Q.; Lu, D. A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control. Biomimetics 2023, 8, 126. https://doi.org/10.3390/biomimetics8010126
Wang Z, Kou L, Ke W, Chen Y, Bai Y, Li Q, Lu D. A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control. Biomimetics. 2023; 8(1):126. https://doi.org/10.3390/biomimetics8010126
Chicago/Turabian StyleWang, Zhen, Lei Kou, Wende Ke, Yuhan Chen, Yan Bai, Qingfeng Li, and Dongxin Lu. 2023. "A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control" Biomimetics 8, no. 1: 126. https://doi.org/10.3390/biomimetics8010126
APA StyleWang, Z., Kou, L., Ke, W., Chen, Y., Bai, Y., Li, Q., & Lu, D. (2023). A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control. Biomimetics, 8(1), 126. https://doi.org/10.3390/biomimetics8010126