Real-Time Accelerator Diagnostic Tools for the MAX IV Storage Rings

 , , , , , , , , , , and
, , , , , , , , , , and
Abstract
:1. Introduction
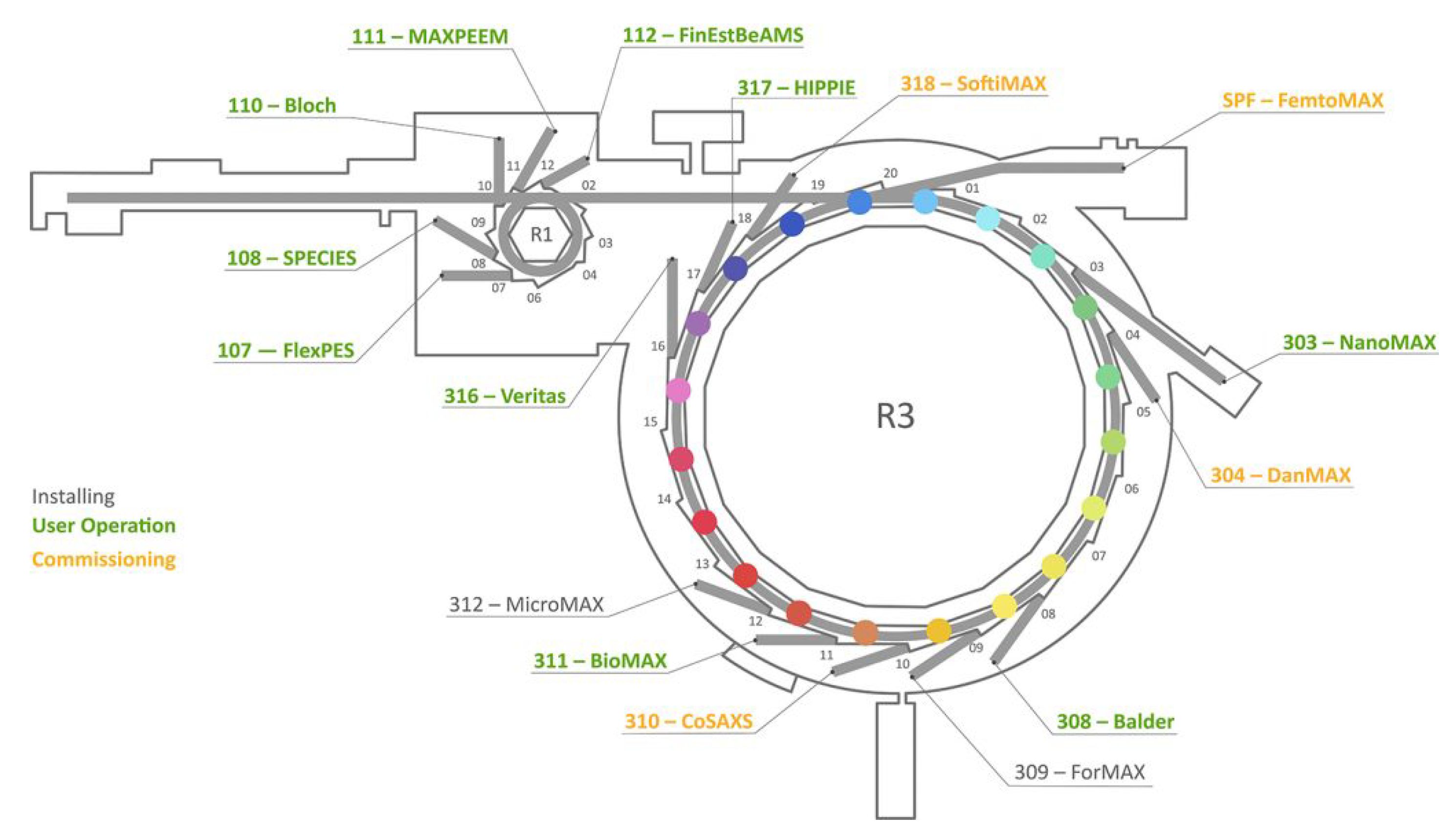
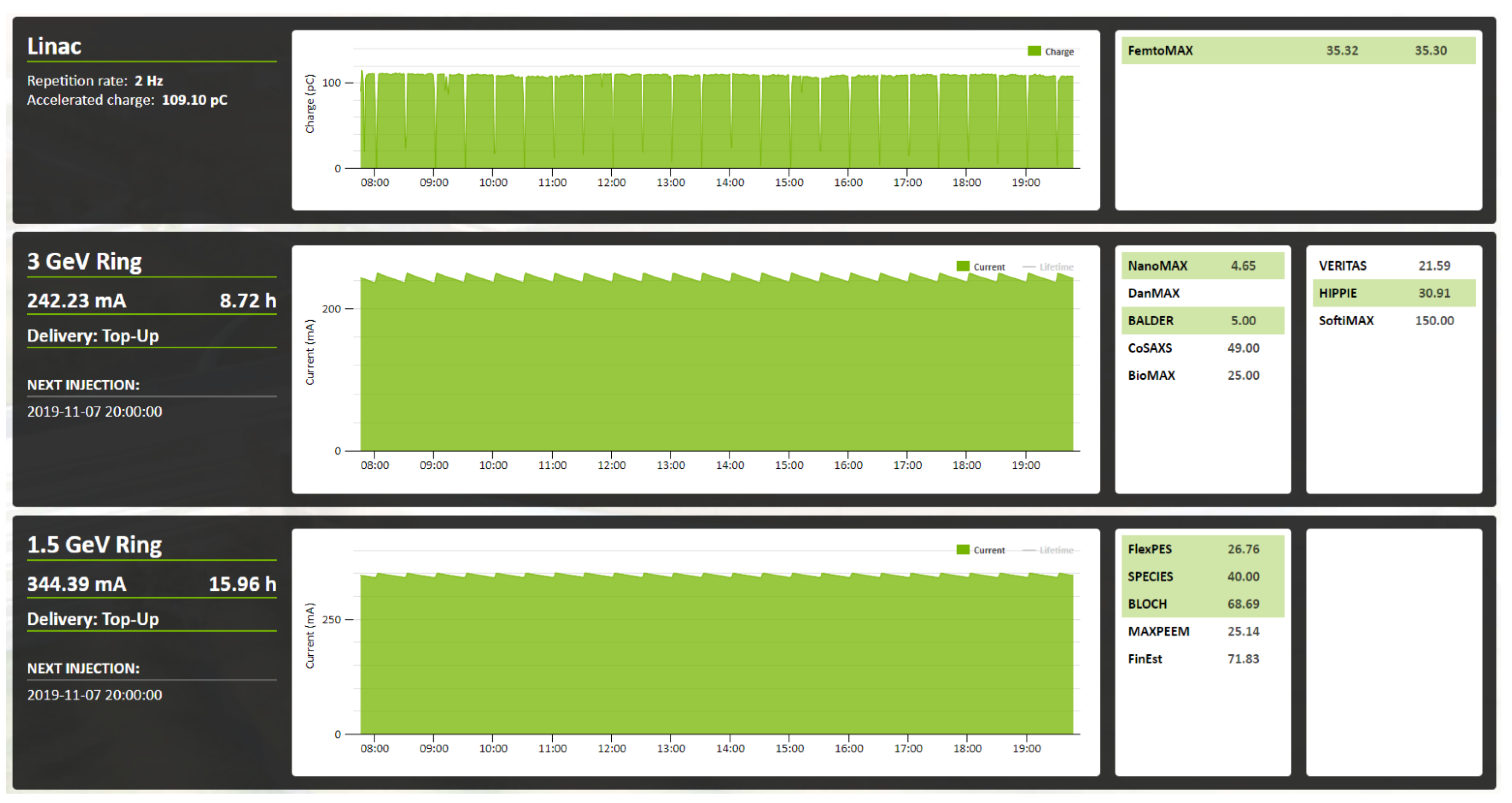
2. MAX IV Accelerator Operations
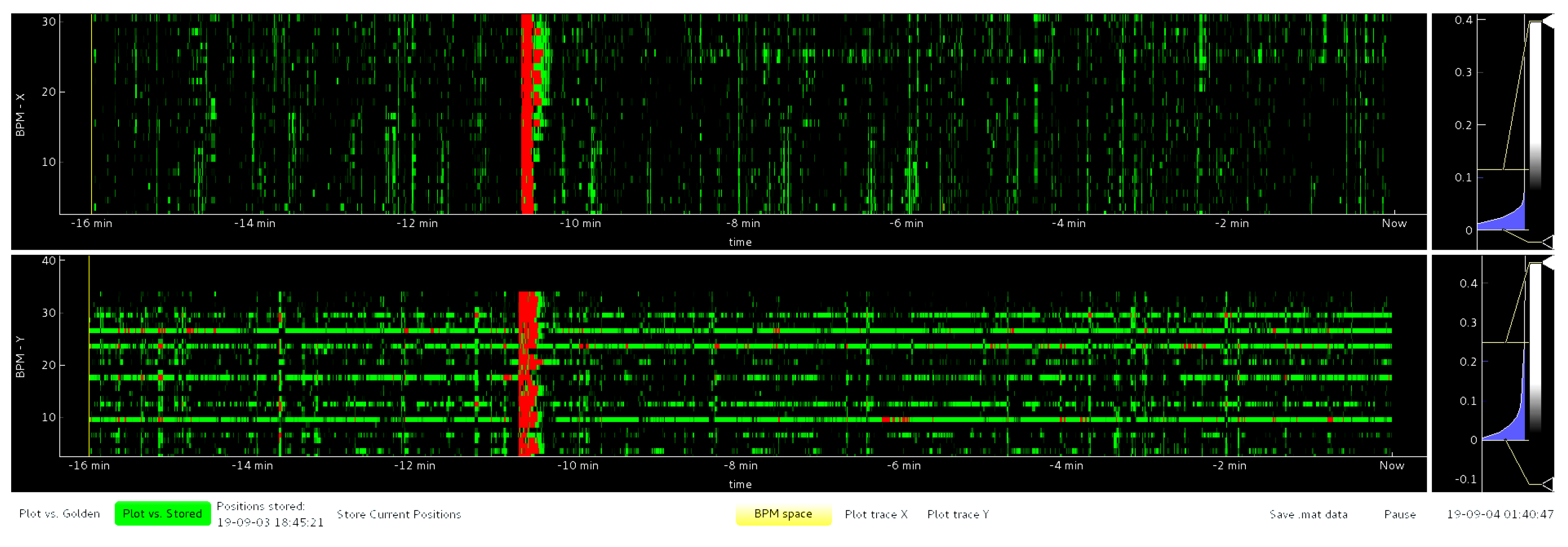
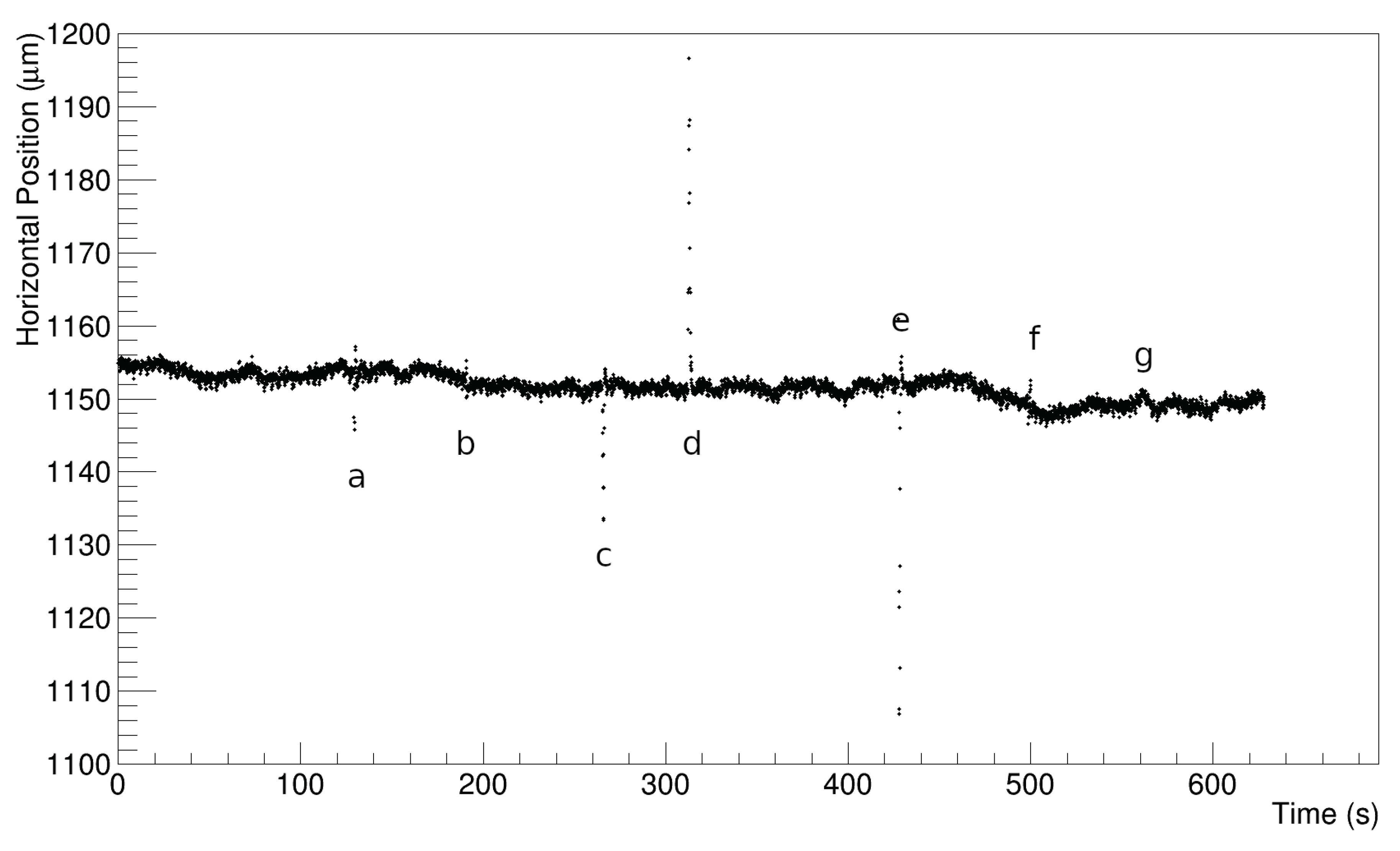
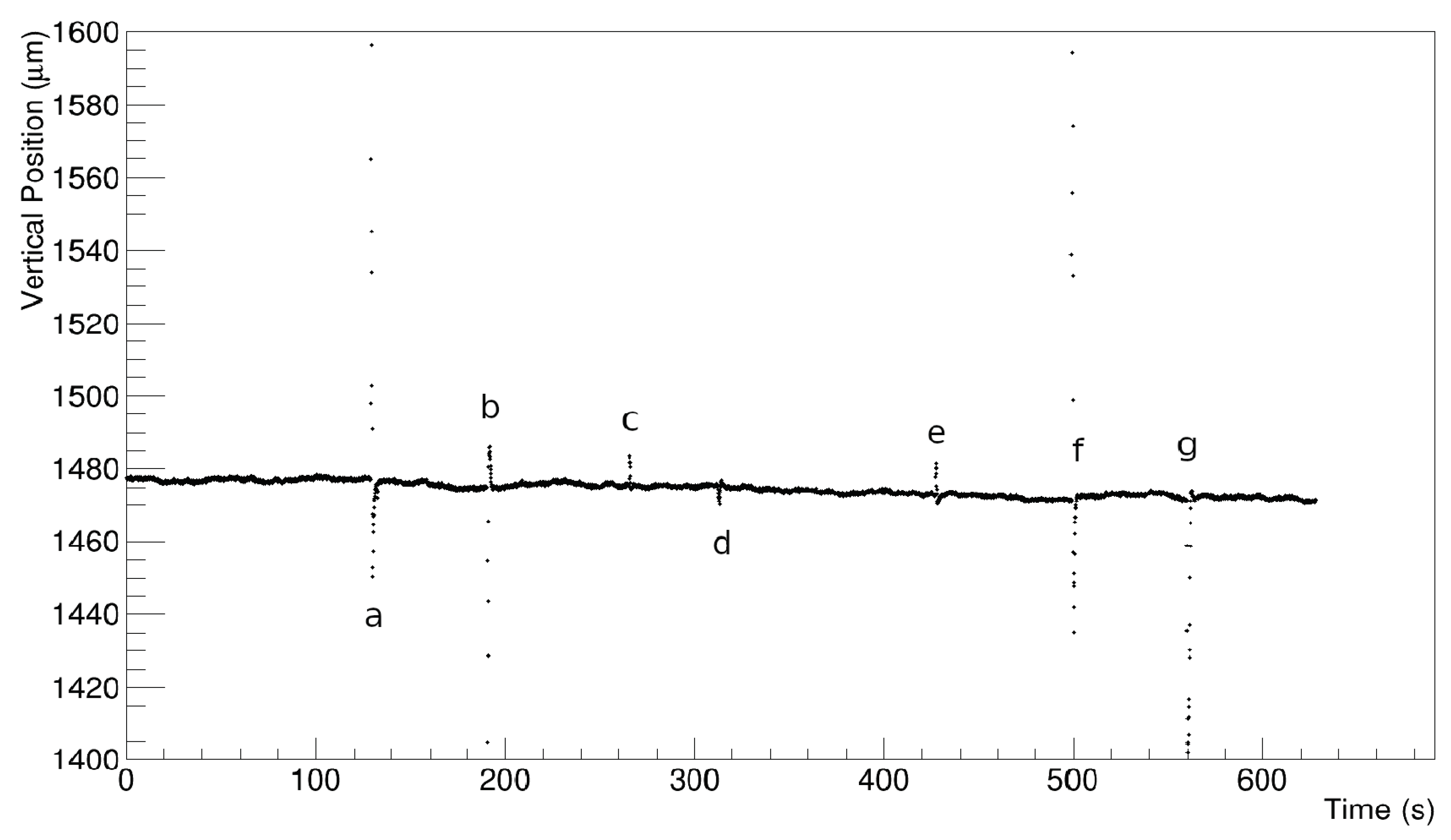
3. Beam Position Monitor Time Evolution
4. WOBBL
WOBBL Limitations and Future Improvements
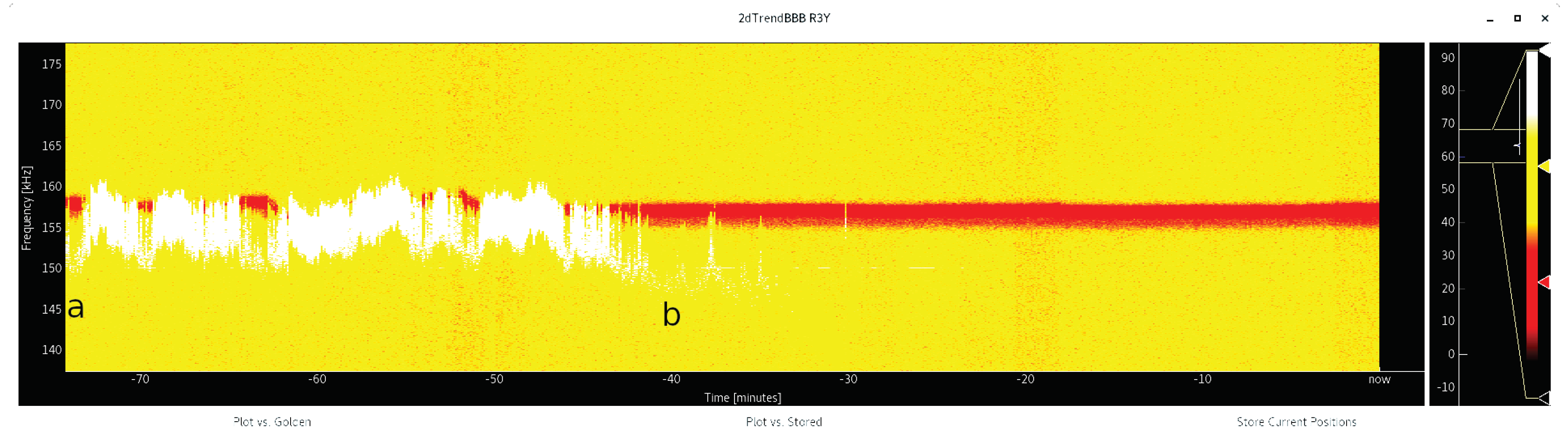
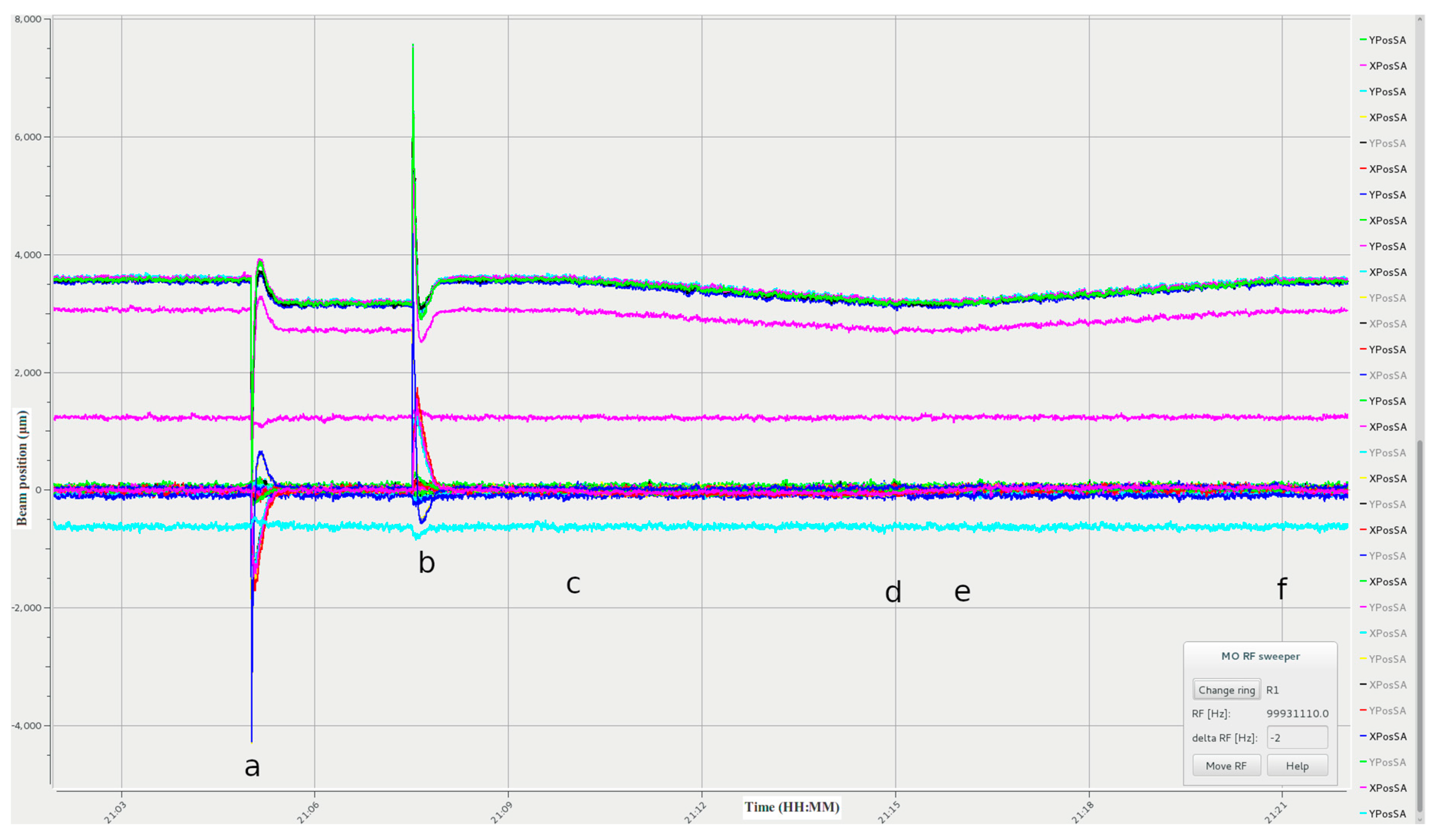
5. Soft MO RF Sweeper
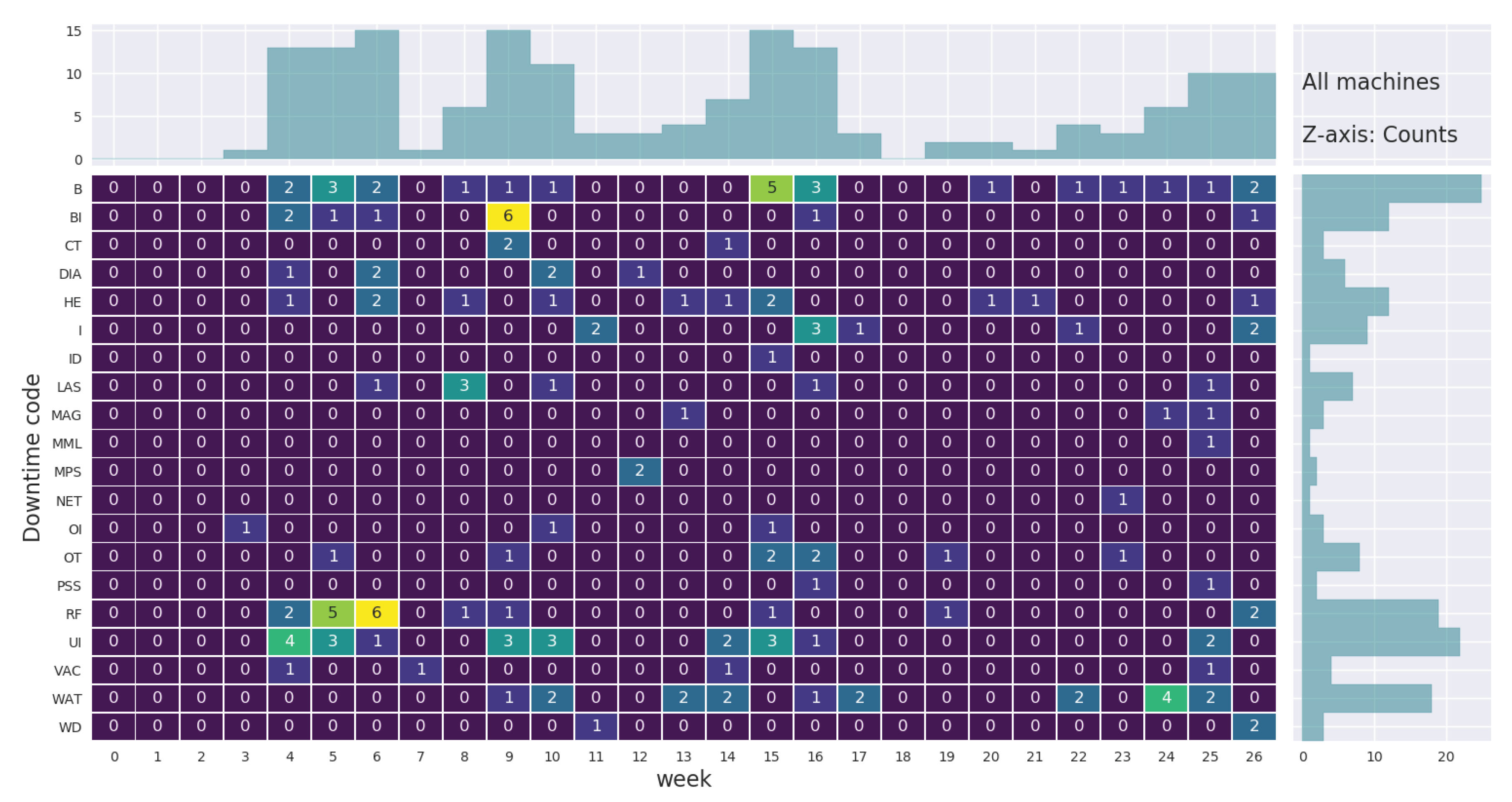
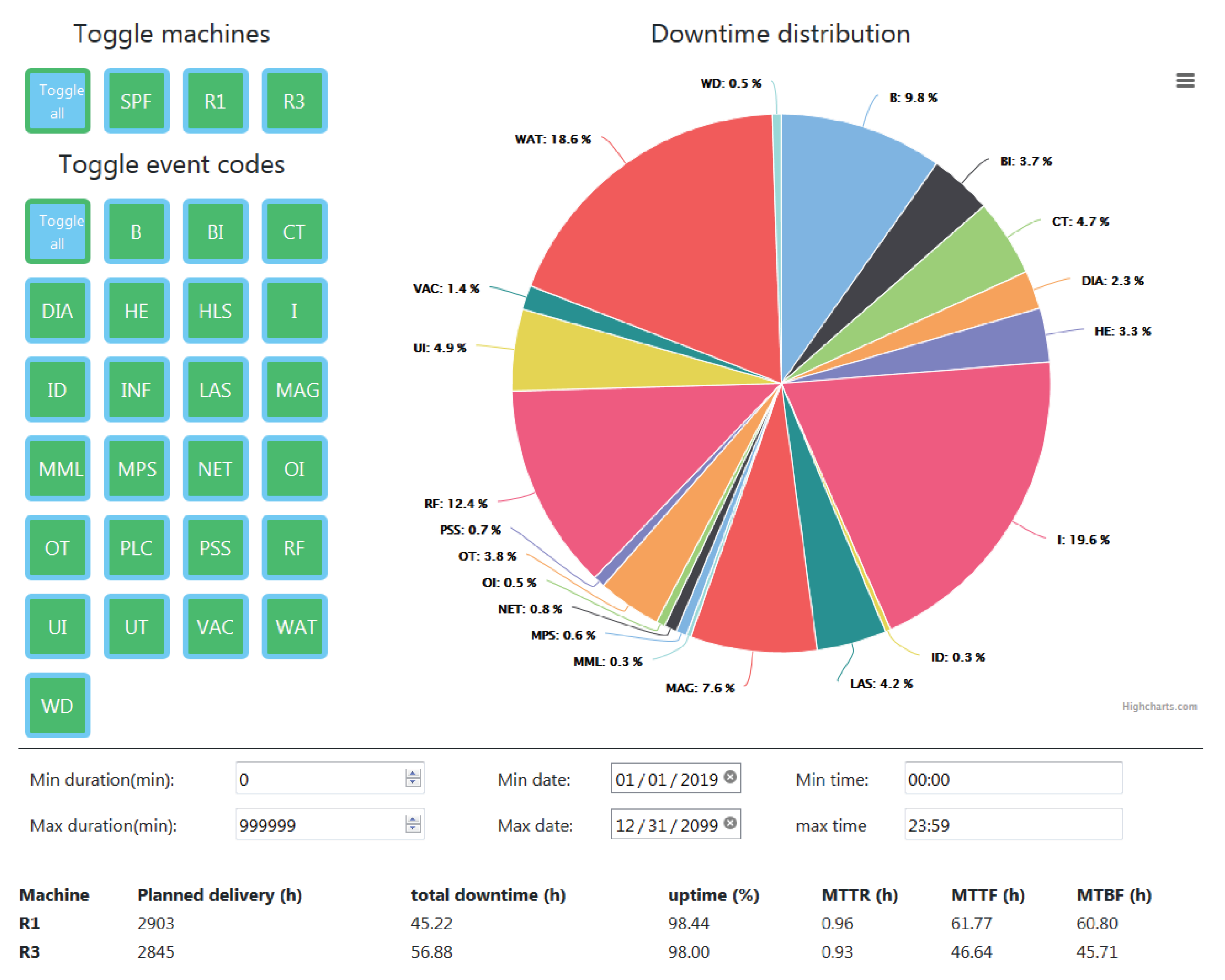
6. Availability and Downtime Monitoring
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Martensson, N.; Eriksson, M. The saga of MAX IV, the first multi-bend achromat synchrotron light source. Nucl. Instrum. Methods Phys. Res. 2018, 907, 97–104. [Google Scholar] [CrossRef]
- Fernandes Tavares, P.; Leemann, S.; Sjöström, M.; Andersson, Å. The MAX IV storage ring project. J. Synchrotron Radiat. 2014, 21, 862–877. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tavares, P.; Al-Dmour, E.; Andersson, Å.; Breunlin, J.; Cullinan, F.; Mansten, E.; Molloy, S.; Olsson, D.; Olsson, D.; Sjöström, M.; et al. Status of the MAX IV Accelerators. In Proceedings of the 10th International Particle Accelerator Conference (IPAC2019), Melbourne, Australia, 19–24 May 2019; p. TUYPLM3. [Google Scholar] [CrossRef]
- Kallestrup, J.; Alexandre, P.; Andersson, Å.; Ben El Fekih, R.; Breunlin, J.; Olsson, D.; Tavares, P. Studying the Dynamic Influence on the Stored Beam From a Coating in a Multipole Injection Kicker. In Proceedings of the 10th International Particle Accelerator Conference (IPAC2019), Melbourne, Australia, 19–24 May 2019; p. TUPGW063. [Google Scholar] [CrossRef]
- Tavares, P.F.; Andersson, Å.; Hansson, A.; Breunlin, J. Equilibrium bunch density distribution with passive harmonic cavities in a storage ring. Phys. Rev. ST Accel. Beams 2014, 17, 064401. [Google Scholar] [CrossRef]
- Salom, A.; Andersson, Å.; Lindvall, R.; Malmgren, L.; Milan, A.; Mitrovic, A.; Pérez, F. Digital LLRF for MAX IV. In Proceedings of the 8th International Particle Accelerator Conference (IPAC 2017), Copenhagen, Denmark, 14–19 May 2017; p. THPAB135. [Google Scholar] [CrossRef]
- McGinnis, D.P. Beam Stabilization and Instrumentation Systems based on Internet of Things Technology. In Proceedings of the Low-Level Radio Frequency Workshop (LLRF 2019), Chicago, IL, USA, 29 September–3 October 2019. [Google Scholar]
- Olsson, D.; Malmgren, L.; Karlsson, A. The Bunch-by-Bunch Feedback System in the MAX IV 3 GeV Ring; Technical Report LUTEDX/(TEAT-7253)/1-48/(2017); MAX-lab, Lund University: Lund, Sweden, 2017; Volume 7253. [Google Scholar]
- Olsson, D.; Andersson, Å.; Cullinan, F.; Tavares, P. Commissioning of the Bunch-by-Bunch Feedback System in the MAX IV 1.5 GeV Ring. In Proceedings of the 9th International Particle Accelerator Conference (IPAC 2018), Vancouver, BC, Canada, 29 April–4 May 2018; p. THPAL028. [Google Scholar] [CrossRef]
- Ahlback, J.; Johansson, M.A.G.; Leemann, S.C.; Nilsson, R.; Sjöström, M. Orbit Feedback System for the MAX IV 3 GeV Storage Ring. Conf. Proc. 2011, C110904, 499–501. [Google Scholar]
- Leemann, S.; Andersson, Å.; Sjöström, M. First Optics and Beam Dynamics Studies on the MAX IV 3 GeV Storage Ring. In Proceedings of the 8th International Particle Accelerator Conference (IPAC 2017), Copenhagen, Denmark, 14–19 May 2017; p. WEPAB075. [Google Scholar] [CrossRef]
- Thorin, S.; Andersson, J.; Curbis, F.; Eriksson, M.; Karlberg, O.; Kumbaro, D.; Mansten, E.; Olsson, D.; Werin, S. The MAX IV Linac. In Proceedings of the 27th Linear Accelerator Conference, LINAC2014, Geneva, Switzerland, 31 August–5 September 2014; pp. 400–403. [Google Scholar]
- Petersson, J.; Svärd, R. BPM-Trends. 2019. Available online: https://github.com/hurvan/BPM-Trends (accessed on 25 August 2020).
- PyQtGraph. Available online: https://pyqtgraph.readthedocs.io/en/latest/graphicsItems/histogramlutitem.html (accessed on 25 August 2020).
- Johansson, A. WOBBL—Widget for Orbit Bumps at BeamLines. 2019. Available online: https://gitlab.com/maxivOperations/wobbl/-/tree/master (accessed on 25 August 2020).
- Johansson, U.; Vogt, U.; Mikkelsen, A. NanoMAX: A hard x-ray nanoprobe beamline at MAX IV. In X-ray Nanoimaging: Instruments and Methods; SPIE: San Diego, CA, USA, 2013; Volume 8851, p. 88510L. [Google Scholar] [CrossRef]
- Thunnissen, M.; Sondhauss, P.; Wallén, E.; Theodor, K.; Logan, D.; Labrador, A.; Unge, J.; Appio, R.; Fredslund, F.; Ursby, T. BioMAX: The Future Macromolecular Crystallography Beamline at MAX IV. In Proceedings of the 11th International Conference on Synchrotron Radiation Instrumentation (SRI 2012), Lyon, France, 9–13 July 2012; Volume 425. [Google Scholar] [CrossRef]
- Bolling, B. Soft Master Oscillator Radio Frequency Sweeper. 2019. Available online: https://github.com/benjaminbolling/MAXIVsoftRFsweeper (accessed on 25 August 2020).
- Høier, R. MAX IV Downtime Web Application. 2019. Available online: https://github.com/Rasmuskh/downtime (accessed on 20 August 2020).
- Lüdeke, A. Operation event logging system of the Swiss Light Source. Phys. Rev. ST Accel. Beams 2009, 12, 024701. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices |
|---|
| Main cavity field amplitude and phase |
| Main cavity frequency |
| Landau cavity field amplitude |
| Robinson mode feedback (only 3 GeV ring) |
| Slow orbit feedback |
| Tune feedback (only 1.5 GeV ring) |
| Parameter | Value |
|---|---|
| Stored current | 500 mA |
| Top-up mode | 30 min via dipole kicker |
| Filling pattern | Uniform (32 buckets) |
| Landau cavities conditions | 2 cavities tuned in |
| BBB feedback | ON (vertical and horizontal) |
| Slow orbit feedback | ON |
| Parameter | Value |
|---|---|
| Stored current | 250 mA |
| Top-up mode | 10 min via MIK |
| Filling pattern | 166/176 filled buckets |
| Landau cavities conditions | 3 cavities tuned in |
| BBB feedback | ON (vertical) |
| Slow orbit feedback | ON |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meirose, B.; Abelin, V.; Bertilsson, F.; Bolling, B.E.; Brandin, M.; Holz, M.; Høier, R.; Johansson, A.; Kalbfleisch, S.; Lilja, P.; et al. Real-Time Accelerator Diagnostic Tools for the MAX IV Storage Rings. Instruments 2020, 4, 26. https://doi.org/10.3390/instruments4030026
Meirose B, Abelin V, Bertilsson F, Bolling BE, Brandin M, Holz M, Høier R, Johansson A, Kalbfleisch S, Lilja P, et al. Real-Time Accelerator Diagnostic Tools for the MAX IV Storage Rings. Instruments. 2020; 4(3):26. https://doi.org/10.3390/instruments4030026
Chicago/Turabian StyleMeirose, Bernhard, Viktor Abelin, Fredrik Bertilsson, Benjamin E. Bolling, Mathias Brandin, Michael Holz, Rasmus Høier, Andreas Johansson, Sebastian Kalbfleisch, Per Lilja, and et al. 2020. "Real-Time Accelerator Diagnostic Tools for the MAX IV Storage Rings" Instruments 4, no. 3: 26. https://doi.org/10.3390/instruments4030026
APA StyleMeirose, B., Abelin, V., Bertilsson, F., Bolling, B. E., Brandin, M., Holz, M., Høier, R., Johansson, A., Kalbfleisch, S., Lilja, P., Lundquist, J. S., Molloy, S., Persson, F., Petersson, J. E., Serodio, H., Svärd, R., & Winchester, D. (2020). Real-Time Accelerator Diagnostic Tools for the MAX IV Storage Rings. Instruments, 4(3), 26. https://doi.org/10.3390/instruments4030026