1. Introduction
Among the various devices developed for smart home and business applications, most projects are dedicated to light, heating and other electric devices control, safety and security, etc. A lesser, but also notable, part of such projects is aimed at creating smart devices for leisure and recreation. The development of the digital industry does not remain separate from the entertainment industry. There are several interesting projects aimed at imitating professional human activity. The robot artist project ArtCybe partially imitates the performances of a real artist. Unlike a conventional printer, where the image is applied by visually mixing three colors, this solution contains a system for directly mixing inks to obtain the desired shade of color [
1].
Compressorhead is a project by Berlin artist Frank Barnes and employees of Markus Kolb and Stock Plum, consisting of a “group” of robots that play real electrical and acoustic instruments. The robots are made from recycled parts and are controlled via a MIDI sequencer [
2]. Various projects also appear in the field of equipment for public or home bars: Barobot [
3], Smartender [
4], and the Wine Blending Bartender [
5]. As one can see, these projects occupy a relatively small and underestimated place in society.
Another project for making cocktails is Bartendro (
Figure 1), available now in two versions, with either 7 or 15 peristaltic pumps, for about
$2500 or
$3600, respectively [
6]. The system is controlled by a minicomputer Raspberry Pi B+.
One can see that the main emphasis in the design of these installations iss on fashionable appearance, visuals, and sound effects, while the accuracy and functionality, as well as the price vs. quality ratio, have not been not sufficiently developed. The systems for liquid dosing are mostly based on peristaltic or syringe pumps. Membrane pumps are also used because they are cheap and fast, but since they are inaccurate and noisy, their application in smart bartenders is limited.
One of the key problems is the lack of a low-cost, comprehensive, and visually interesting solution, which will be available to the average consumer. Basically, smart bartender solutions shipped by commercial firms have several drawbacks such as high price and extra end-user features, such as the availability of a secure execution [
6]. Professional liquid-dosing devices, primarily designed for medical and pharmacological industry, are inapplicable in this field due to their high prices and unnecessary additional features, such as improved chemical resistance of the materials and industrial protocols [
7]. Further, there are lack of useful features such as control by smartphone via Bluetooth or Wi-Fi connections, the presence of a built-in holder for the container, or simple and intuitive touch control. Their ability to be built in existing smart home environments is also restricted, because these machines usually use proprietary software and lack application programming interfaces (APIs) and external protocols.
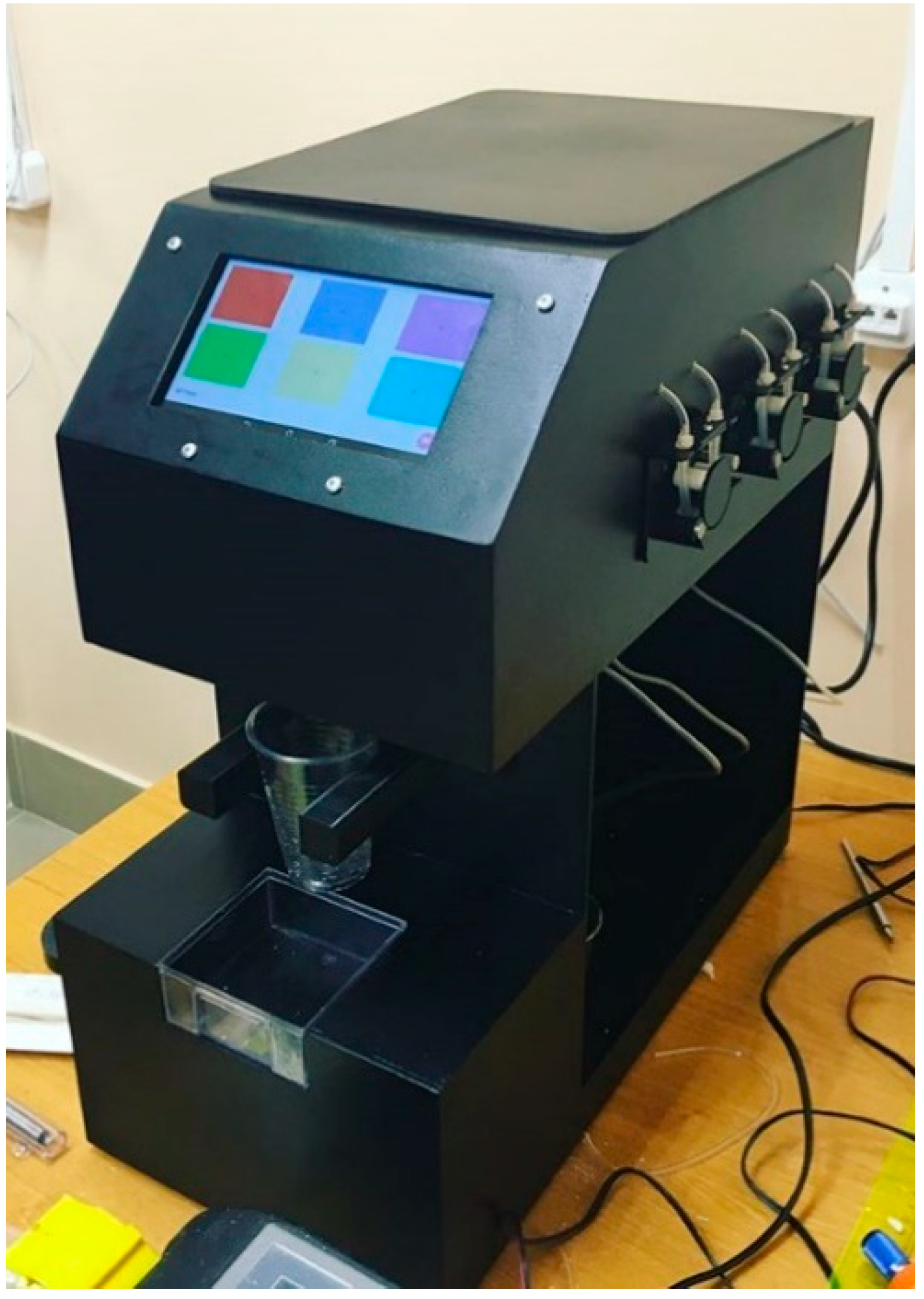
This paper describes development of a system, designed by the students of St. Petersburg Electrotechnical University “LETI”, for high-precision dosing of liquids. The final appearance of the proposed system is given in
Figure 2.
This solution was created from low-cost off-shelf components and is available for personal and commercial use. The system can be implemented as a smart robotic bartender and for automation of domestic tasks as well, including cooking and hobby applications, e.g., perfumery. Such devices can also automatically sort out different combinations of products to discover new recipes in the beverage industry.
The paper is organized as follows. The construction of the proposed system is described in
Section 2.
Section 3 provides the description of circuitry, software, and hardware. Finally, some conclusions are given.
2. Construction
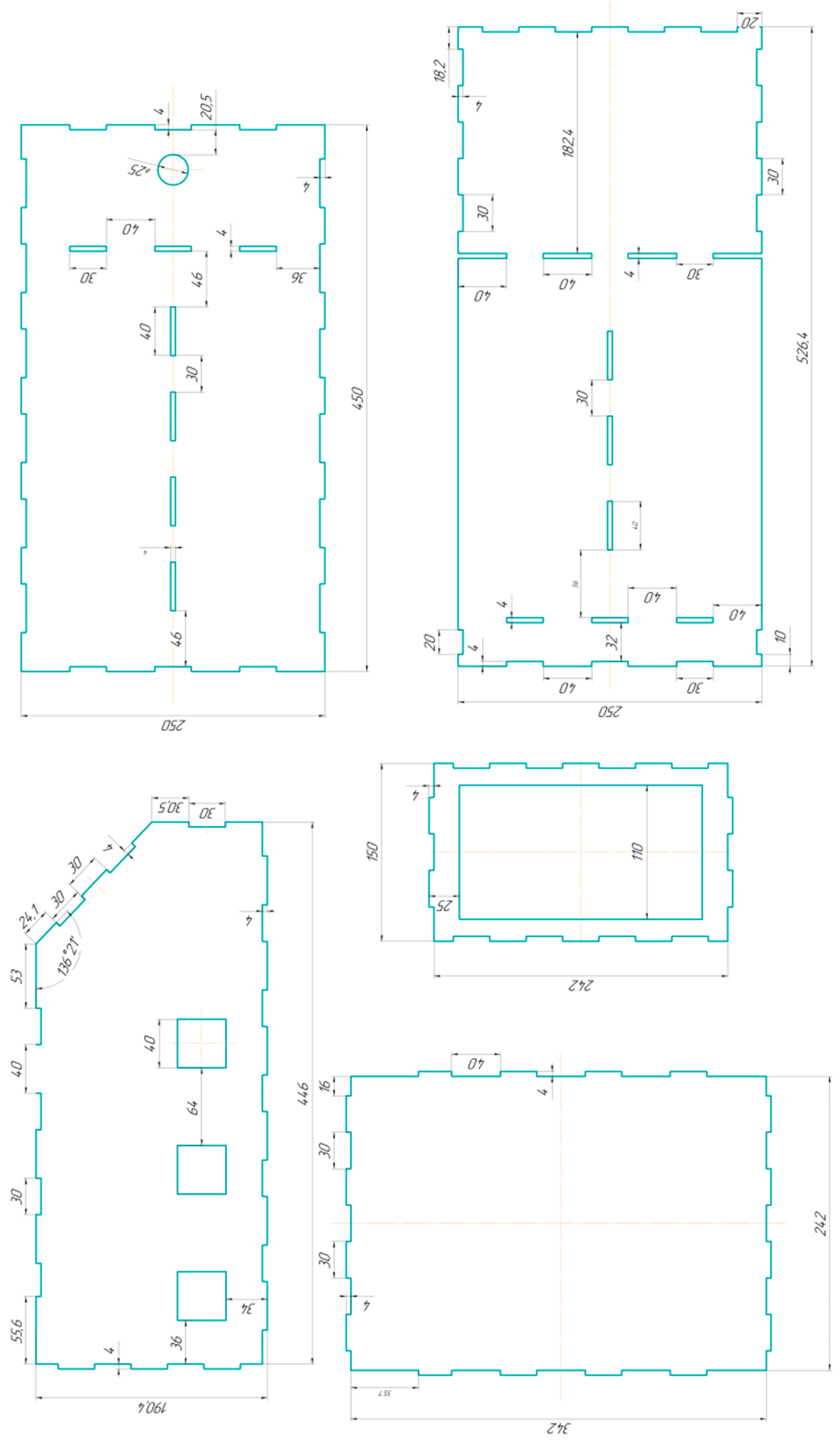
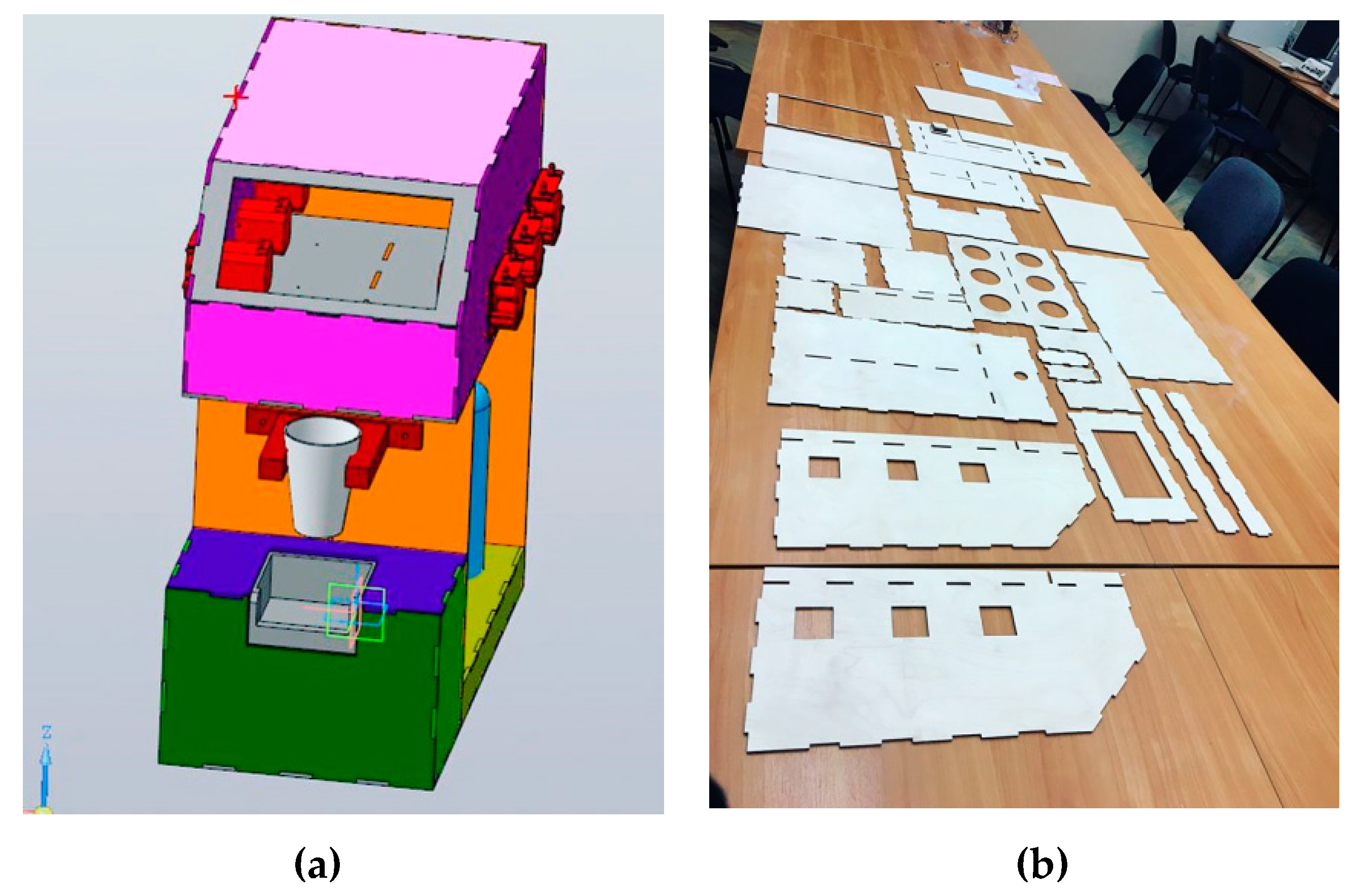
The model-based design approach was chosen as a development paradigm. Thus, the set of 3D models for the proposed system were created first. Then, the blueprints and scans of the case and inner parts were obtained from 3D models (
Figure 3). The body parts of the proposed system were cut on a CNC machine (
Figure 4) from 4 mm plywood.
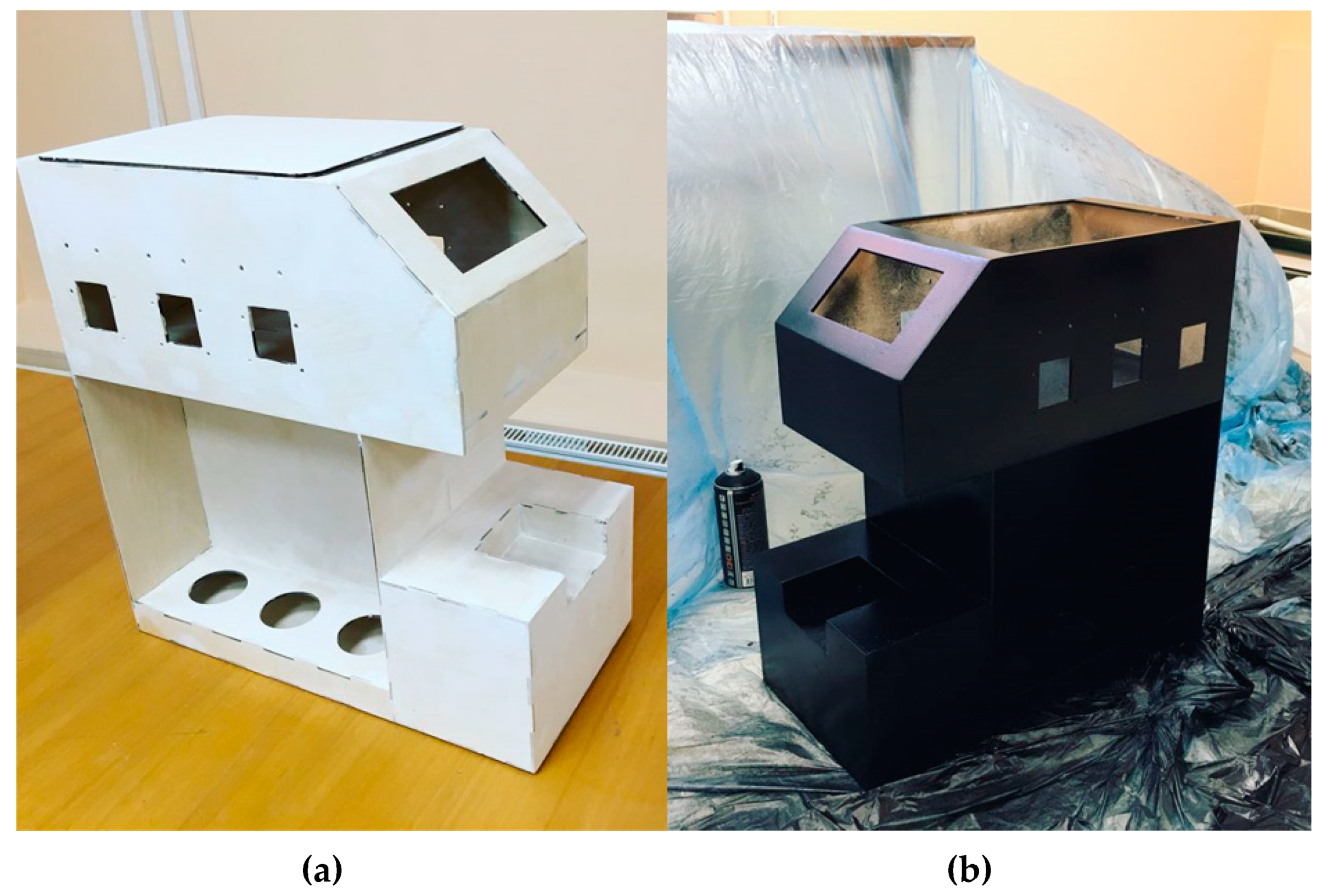
The next step was the assembly, priming and painting of the system casing. The casing was primed and painted with hydrophobic paint, in order to avoid damage from spilled liquids (
Figure 5).
The body of the proposed system has six places for liquid containers, six peristaltic pumps Kamoer [
8] KCS-B16SA3A (
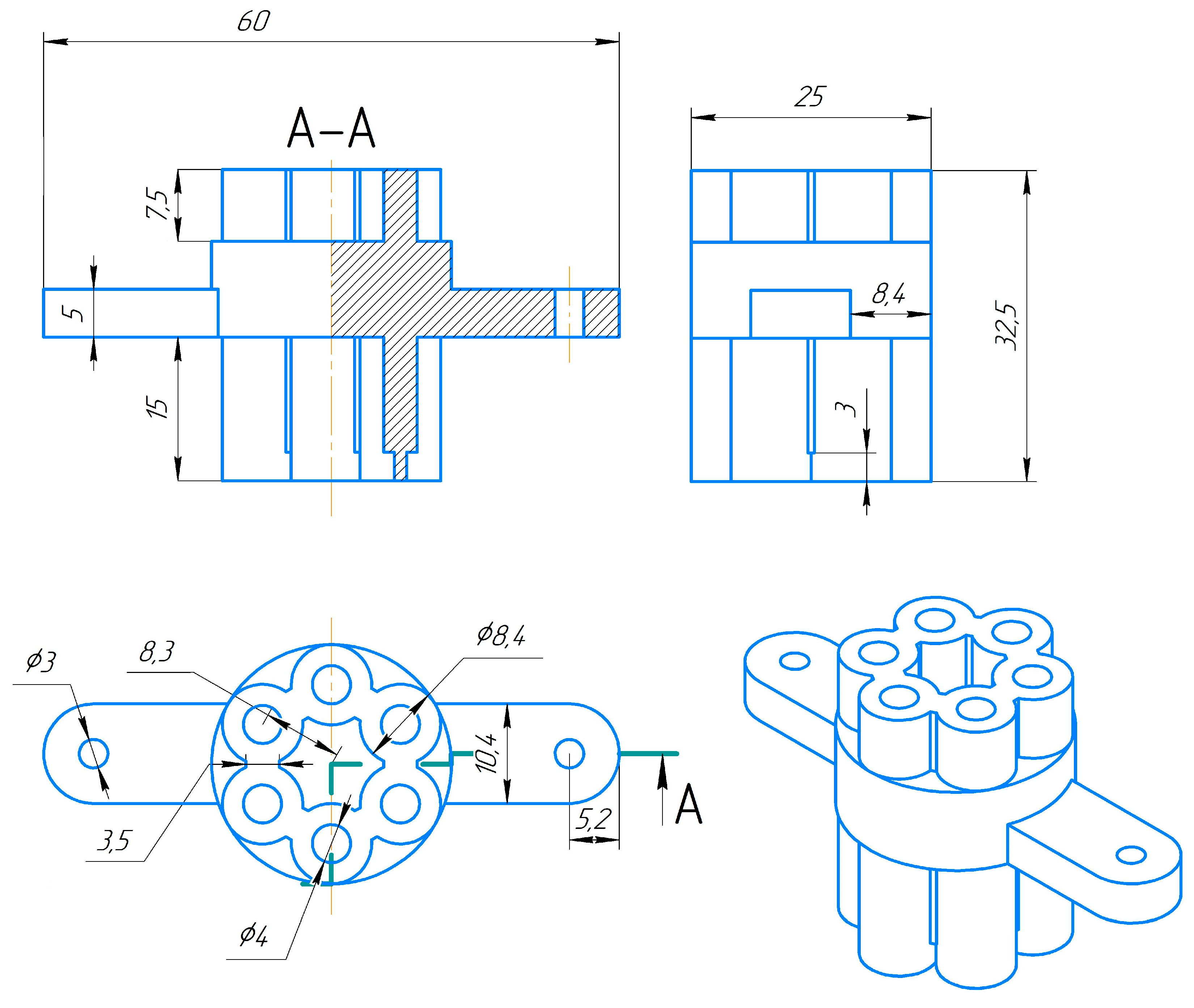
Figure 6), an installation space for the tablet PC, as well as places for embedded electronic components, control systems and a power supply. Liquids are pumped through 4mm medical silicone tubes. The tubes are inserted into a specially designed flow mixer (
Figure 6). The mixer was created using finite-difference flow simulation and allows pouring and mixing all the liquids with different viscosities in a mixing container. Using this special mixer reduces the amount of leaching when changing any of the components.
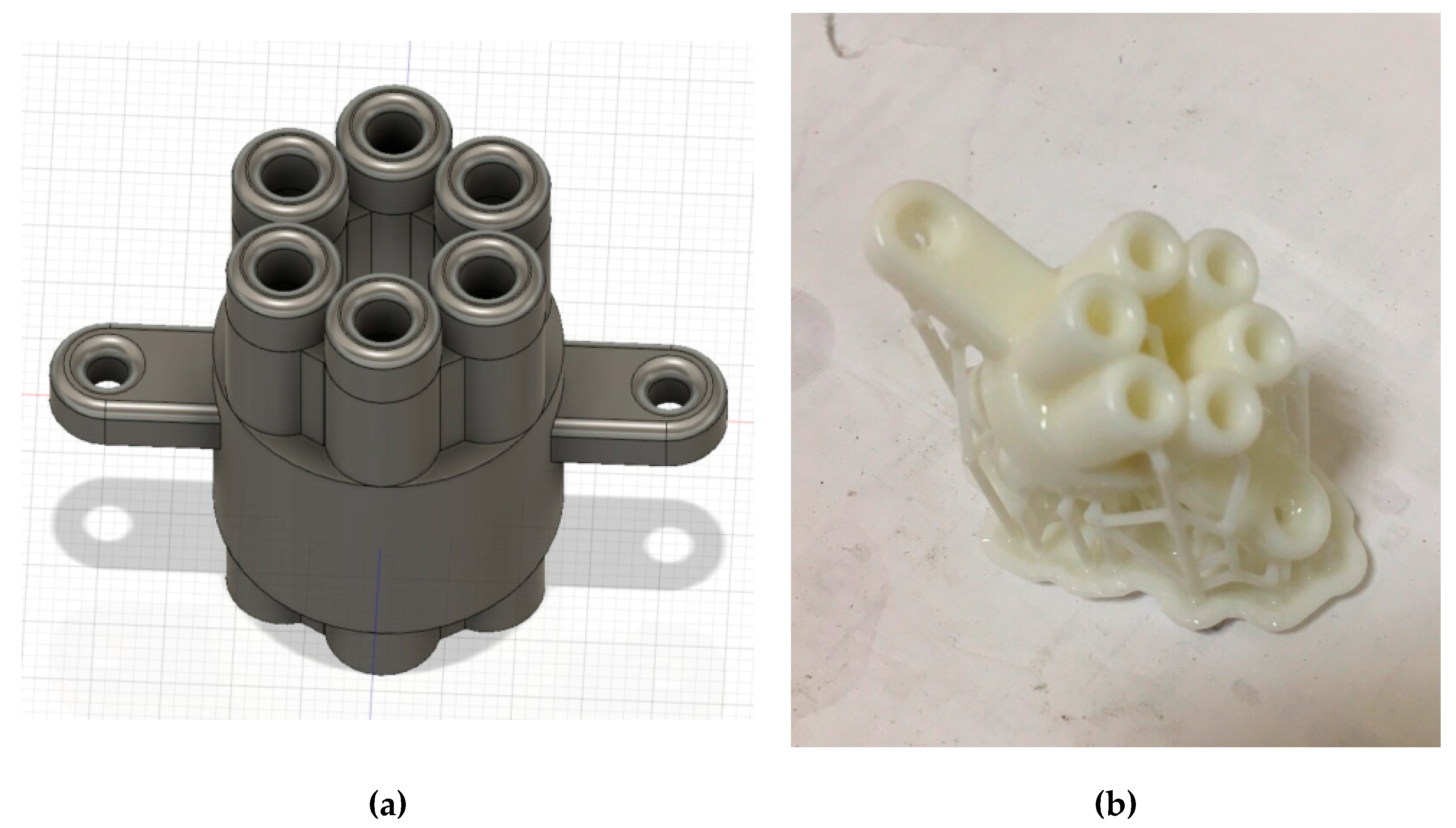
Figure 7 represents the mixing device after being printed on a 3D-printer with food plastic, namely, glycol-modified polyethylene terephthalate (PETG). Rapid prototyping allows reducing the development time in a model-based design approach. The digital twin (
Figure 7a) was created to estimate the design and functionality of the mixing device.
3. Hardware and Software
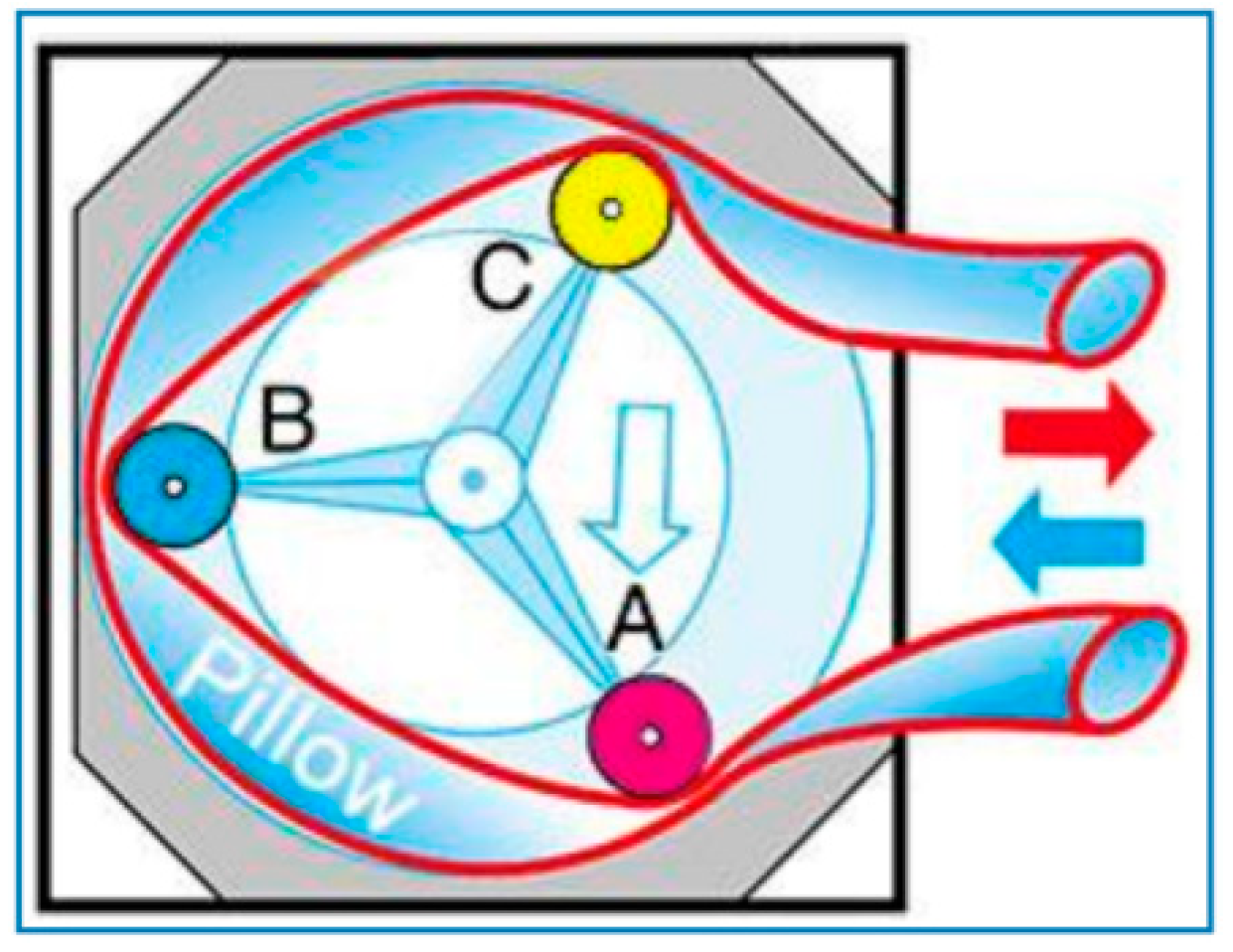
The peristaltic pump is a type of positive displacement pump used for pumping various fluids. Fluids are contained in a flexible tube installed inside the circular pump housing. A rotor with several rollers attached to the outer circumference compresses the flexible tube. When the rotor turns, part of the tube under compression closes, thereby causing the fluid to be pumped and to move through the pipe. In addition, when the tube opens into its natural state after passing the cam, the flow of liquid is fed to the pump. This process is called peristalsis and is used in many biological systems, such as the gastrointestinal tract [
9]. This concept was invented by the world famous cardiac surgeon Dr. Michael DeBakey in 1932 [
10]. The performance of the peristaltic motor (
Figure 8) is described in detail by Suhas R. Dhumal and S. S. Kadam [
11,
12].
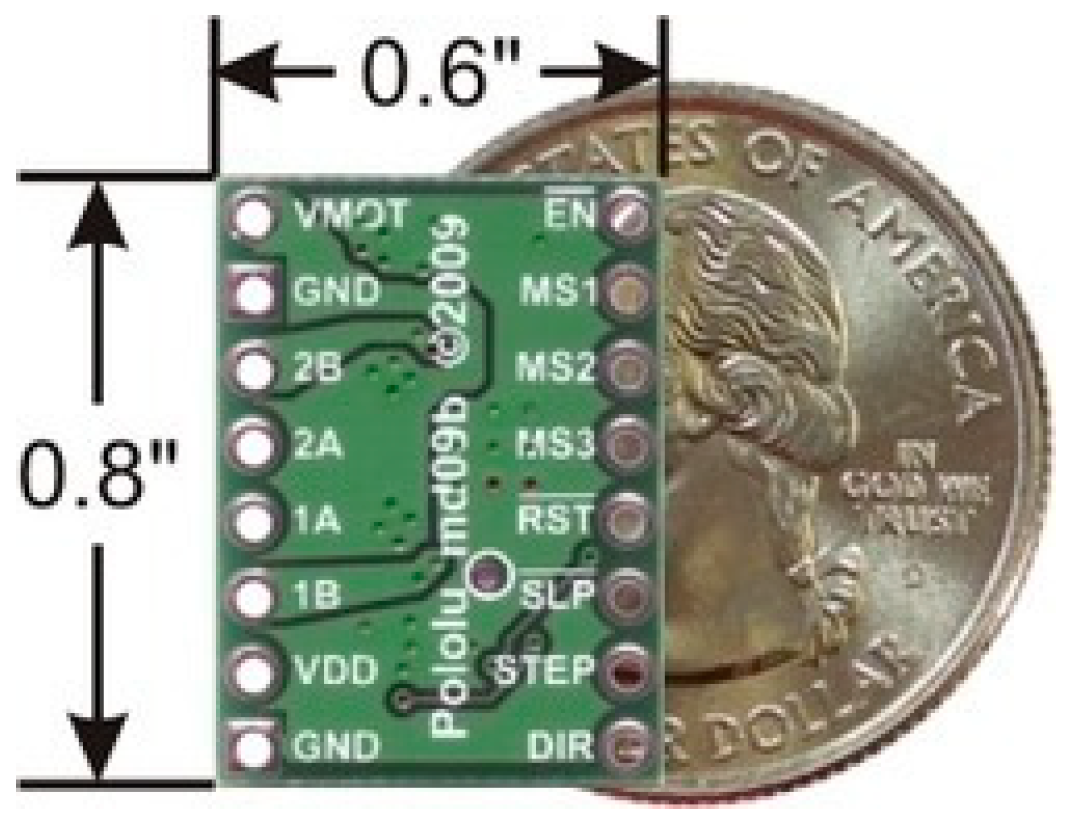
The Kamoer peristaltic pumps are driven by a Pololu A4988 Stepper Motor Driver. Allegro’s A4988 microstepping bipolar stepper motor driver features adjustable current limiting, over-current and over-temperature protection and five different microstep resolutions (down to 1/16-step). It operates from 8 V to 35 V and can deliver up to approximately 1 A per phase without a heat sink or forced air flow (
Figure 9) [
13].
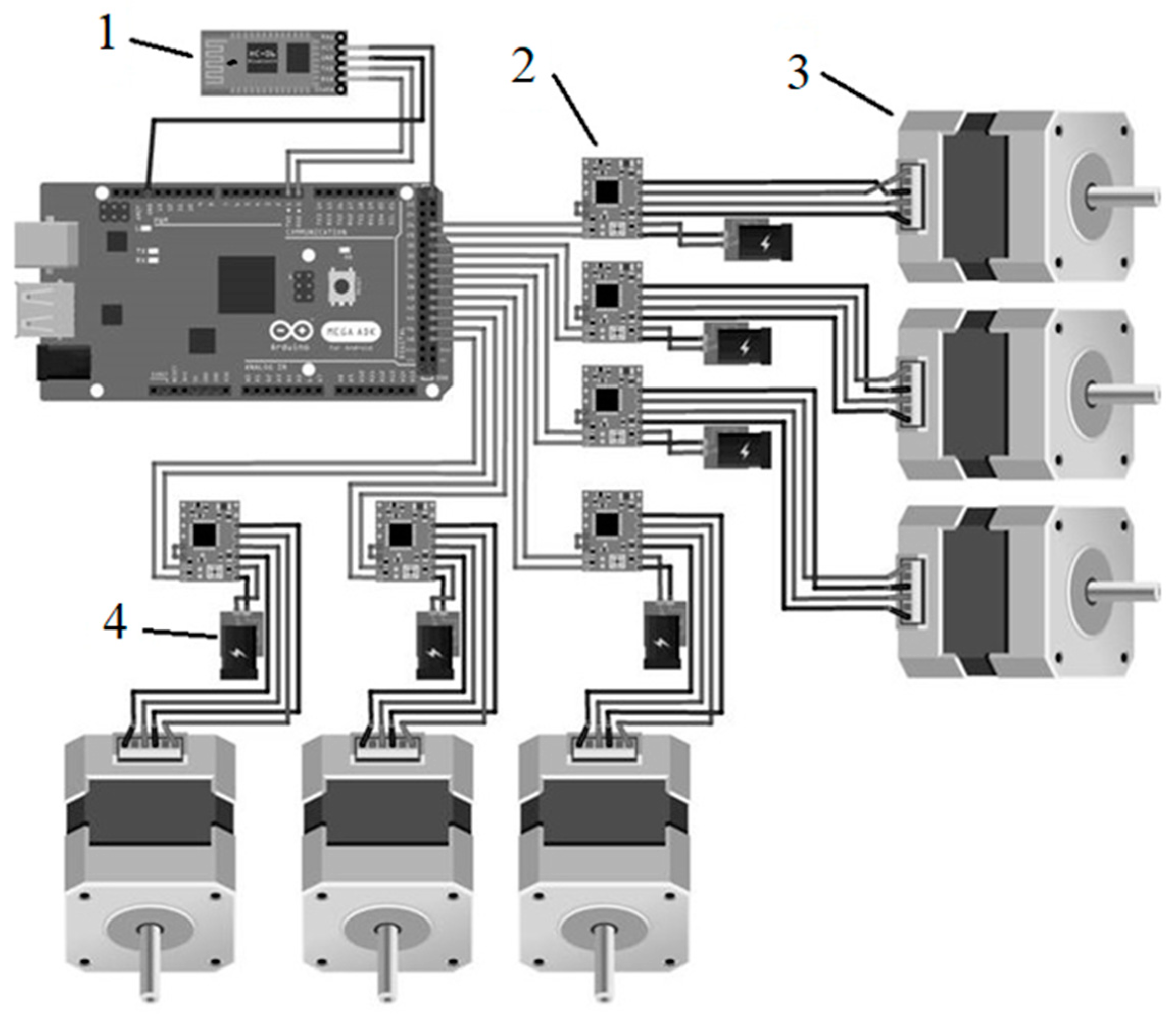
The hardware platform of the proposed system is an Arduino MEGA controller. The Arduino MEGA was chosen due to its large number of digital input/output pins, low cost, and accessibility [
14]. The scheme depicting the connection between the motors, the motor drivers, and the Arduino MEGA is shown in
Figure 10. The Bluetooth module is added for distant control implementation, which is important for distributed applications. The trials discovered that the cooling system is needed to prevent electronics overheating, and the mechanical cooler was installed. In the future, a special circuit board will be developed to integrate all the electronic components.
The nominal power consumption of each motor is 24 V / 2 A [
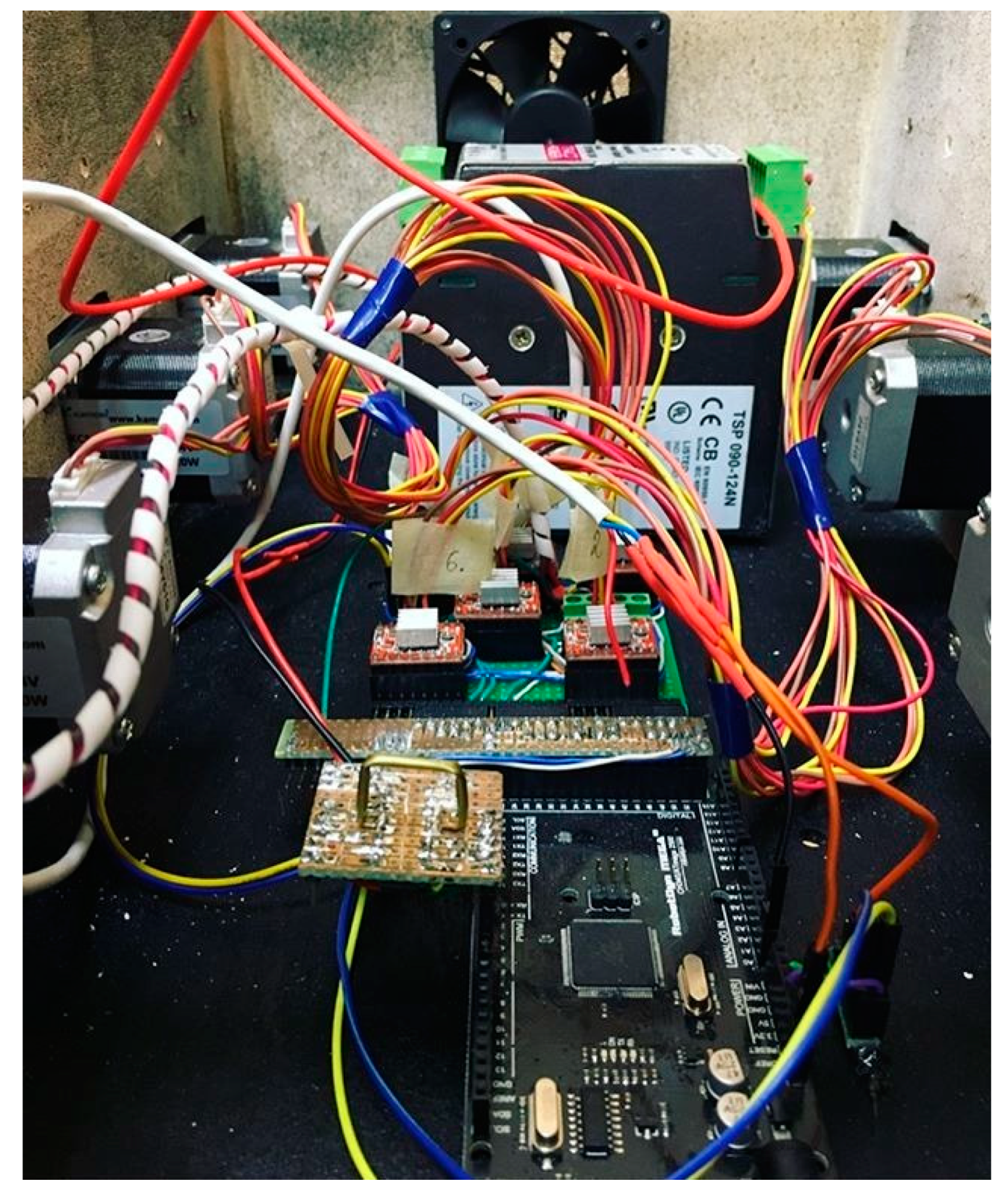
8], so the system uses a 350 watt power supply. Further, there is a 5 V / 1 A power supply for the Arduino MEGA and a 5 V / 2 A power supply for the tablet PC. The arrangement of the elements inside the housing is shown in
Figure 11.
The system uses the Asus ZenPad C Z170CG-1C016A as a tablet PC, with a special Android OS application to control the system via a Bluetooth interface. The Arduino starts the motors in a programmatically defined order depending on the command received from the embedded software. The number of motor steps for pumping 1 mL of liquid is around 1500 [
8]. The dosing precision depends on the viscosity of the liquid but does not exceed 0.05 mL.
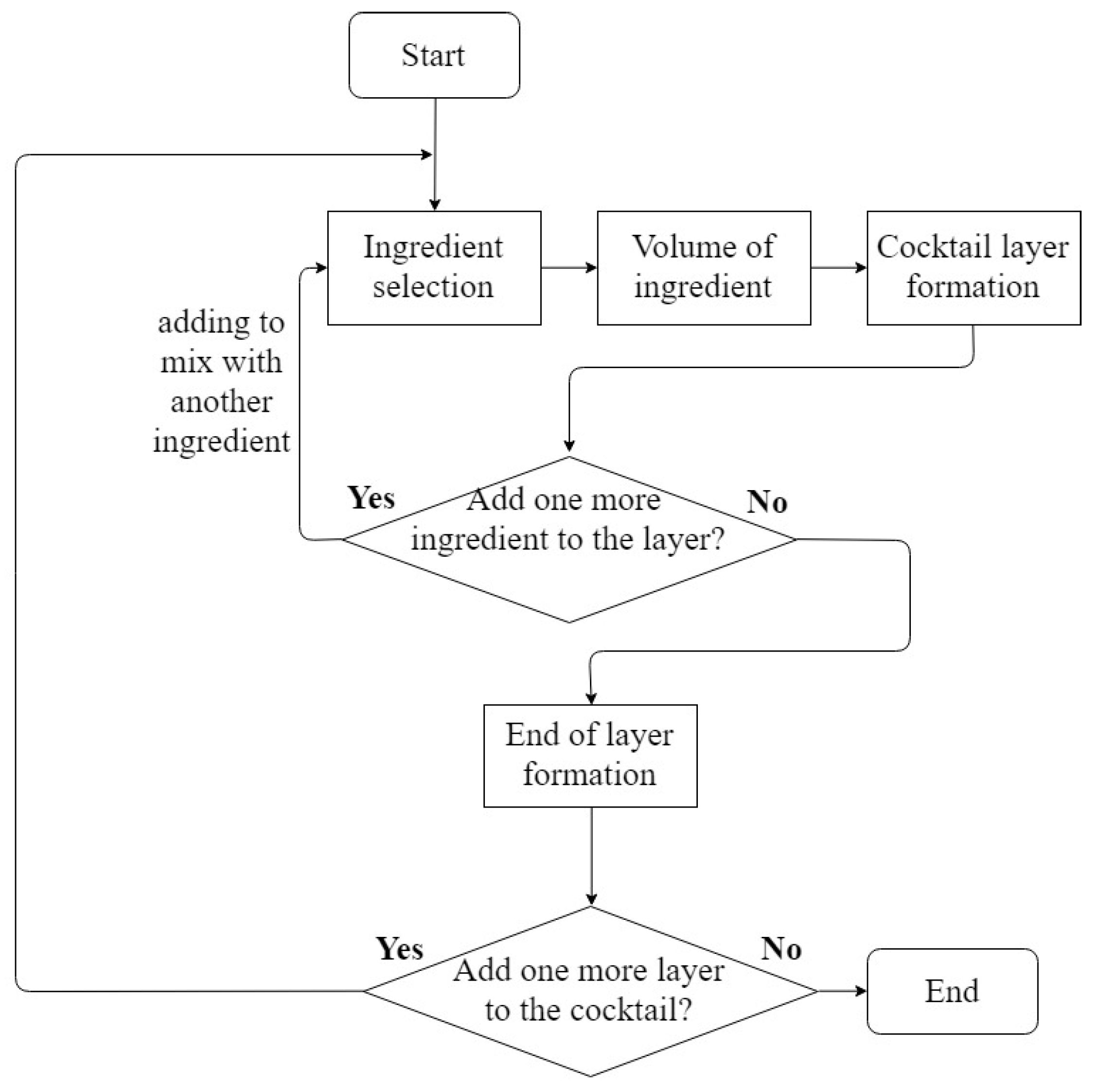
The cocktail preparing algorithm is as follows. First, the first layer is formed by choosing the ingredient and its volume. If the layer consists of more than one component, the next ingredient and its volume is added. Second, if all ingredients of the layer are selected, the formation of the layer is complete. Next, if adding another layer is required, that layer is formed. The algorithm ends when all layers are formed.
The flowchart of the cocktail preparing algorithm is given in
Figure 12.
To evaluate the actual precision of the system, the following set of experiments was performed. Eight liquids that are common in beverage preparation and have various densities were chosen. Each liquid was dosed 10 times with a desirable amount of 50 mL. Then, the average precision was calculated. The dosed volume of the liquid was measured manually with chemical laboratory equipment that is verified with an accuracy of ± 0.005 mL. The experimental results are summarized in
Table 1.
One can see that the liquids with greater densities are dosed with less precision. The viscosity obviously needs to be taken into consideration to increase the overall precision of the system for arbitrary liquids. However, the existing precision does not exceed 2%, which is satisfactory for beverage preparation.
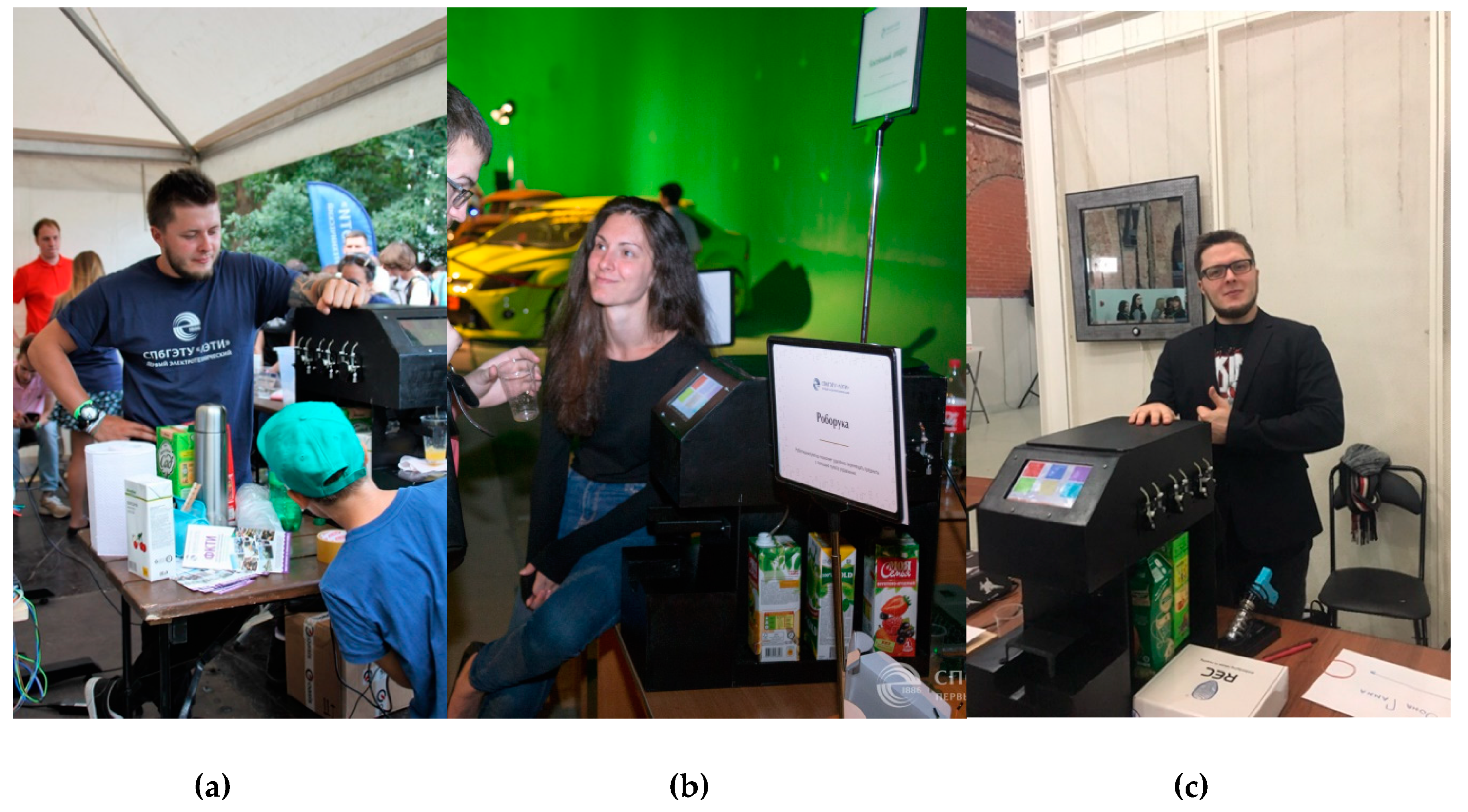
The prototype of the system was presented at various exhibitions and shows: “Geek Picnic 2018”, “Museum Night 2018”, and “Break Point 2019”, in St. Petersburg, Russia (
Figure 13).
The prototype presentation attracted significant interest of visitors and potential investors to the project.
4. Conclusions
The automated dosing system with six peristaltic pumps was designed for high-precision dosing of liquids and preparing mixed or layered cocktails. The embedded hardware and software of the proposed system is described. An Arduino MEGA was used as a hardware platform for the system. The ingredients are pumped through a specially designed mixer by Kamoer peristaltic pumps.
The practical tests show the great applicability of the proposed solution. It was revealed that the system is convenient and quick to use. The experimental part of the high precision of the peristaltic pumps provides a perfect taste for the mixed beverages and the originality of the tech solution plays an important role in attracting visitors. It is important to mention that the project is part of an educational program intended to implement a model-based design approach in students’ projects and has significant educational impact. The hardware of the proposed system became a foundation for a color mixing subsystem of the first prototype of the painting robot, ArtCybe [
1].
In the future, we plan to upgrade the system with an anthropomorphic robot that can move cocktails around the bar and engage in dialogue with visitors. Further research will be also dedicated to the creation of different pump configurations and the search for alternative applications, e.g., water samplers [
15], multi-commuted flow systems [
16], or watercolor robotic painters [
17].

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}