3.1. Wake Effect Analysis
Larsen’s wake loss model is implemented in MATLAB to calculate the wake diameter and the velocity deficit in the wake for three platform configurations. CFD calculations based on the continuity equation and the nonlinear Reynolds-averaged Navier–Stokes (RANS) equations, with a standard
shear stress transport (SST) closure for turbulence, are performed in ANSYS Fluent to compare with the results of the analytical Larsen wake model [
44].
For downstream wind turbines, there is a possibility of wake overlap, and if the overlap of the wake is from two upstream wind turbines, then the wind speed can be estimated as the average of the wind speeds [
26,
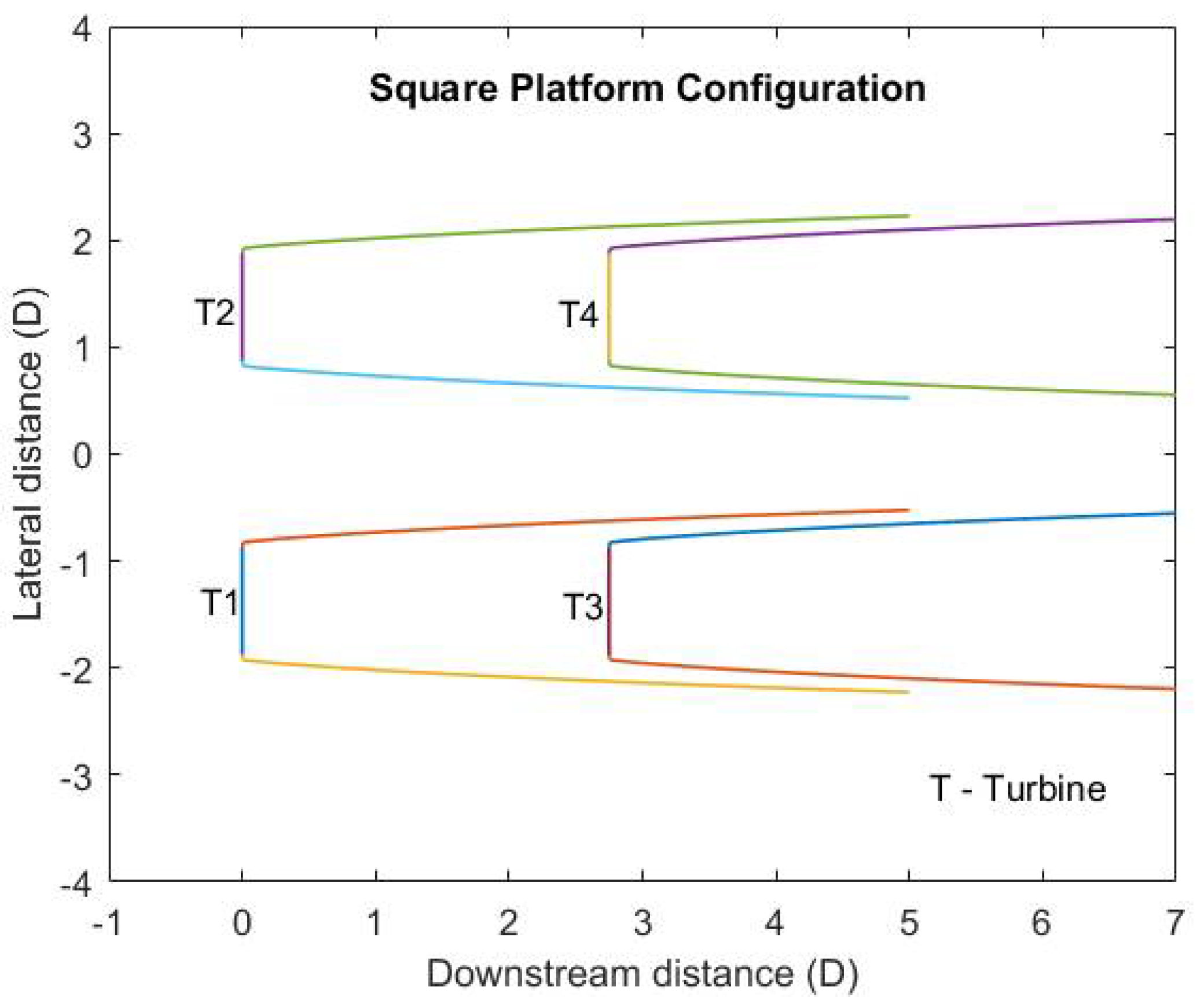
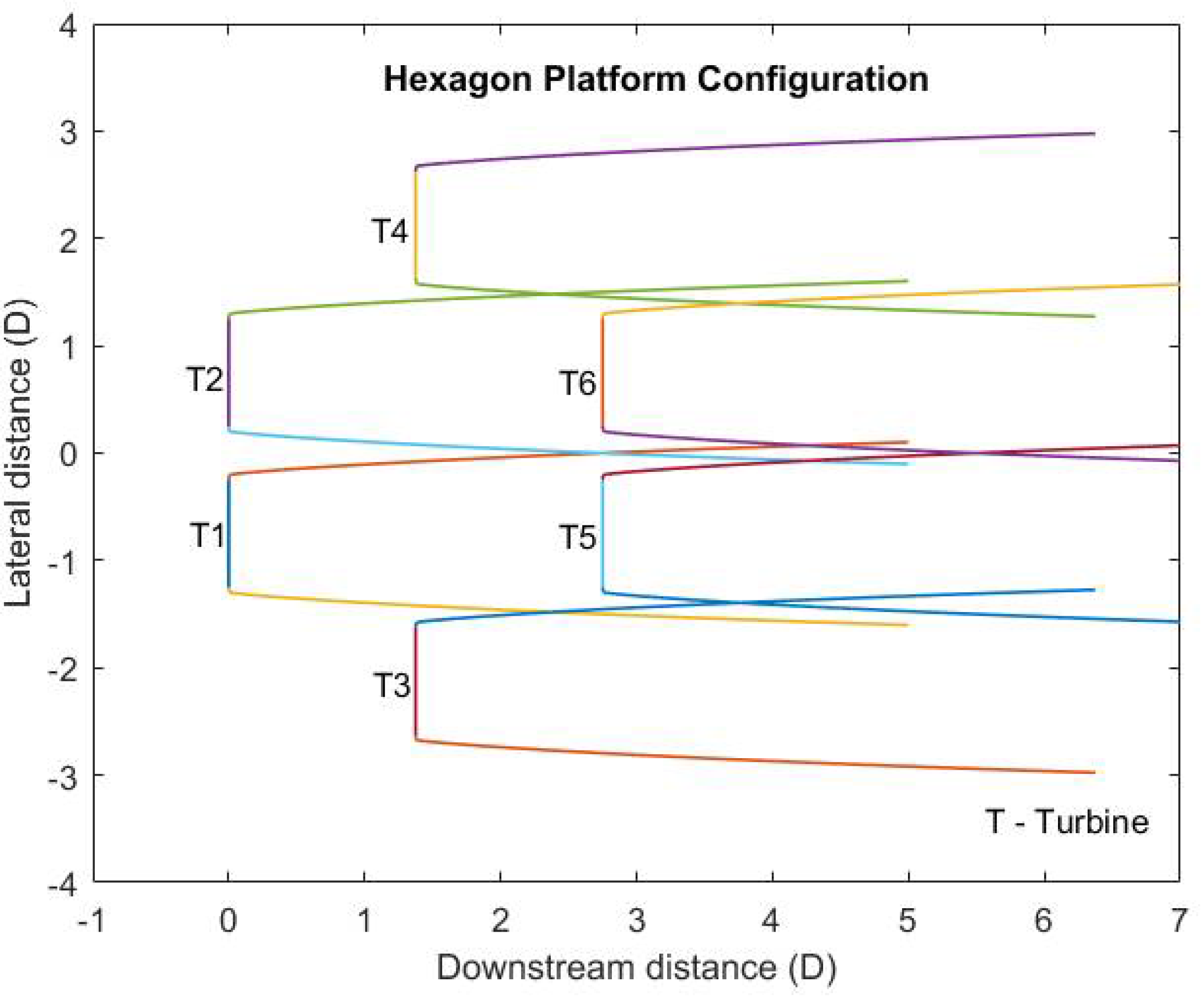
45]. The three platform configurations considered for this study are square, pentagon, and hexagon-shaped platforms. For a square-type platform configuration, the four wind turbines are placed at each corner, separated by a distance of 2.75 times the rotor diameter in the crosswind and downwind directions. For pentagon and hexagon platform configurations, the wind turbines are arranged in three rows. For the pentagon platform, the 2 wind turbines (T1 and T2) in the first row are 1.5 rotor diameters apart in crosswind direction, the third-row turbine (T5) is placed at a 2.75 D
r distance downstream of the first row, and the 2 turbines in the second row (T3 and T4) are placed in between the first and third row in the windward direction, whereas in the crosswind direction they are placed to avoid the wake expansion with an added 20% of the rotor diameter distance between the tip of the wake and the wind turbine rotor. The hexagon configuration is similar to the pentagon except for the two turbines (T5 and T6) in the third row instead of one. The Larsen wake loss model implemented on the three configurations using MATLAB is shown in
Figure 1,
Figure 2 and
Figure 3.
The nonlinear wake expansion downstream of the wind turbines in the above figures shows that the rear wind turbines in the square platform (T3 and T4) and hexagon platform (T5 and T6) are in the direct wake of upstream turbines (T1 and T2), whereas in the pentagon platform, the rear wind turbine (T5) is in partial wake of the upstream turbines (T1 and T2). The value of
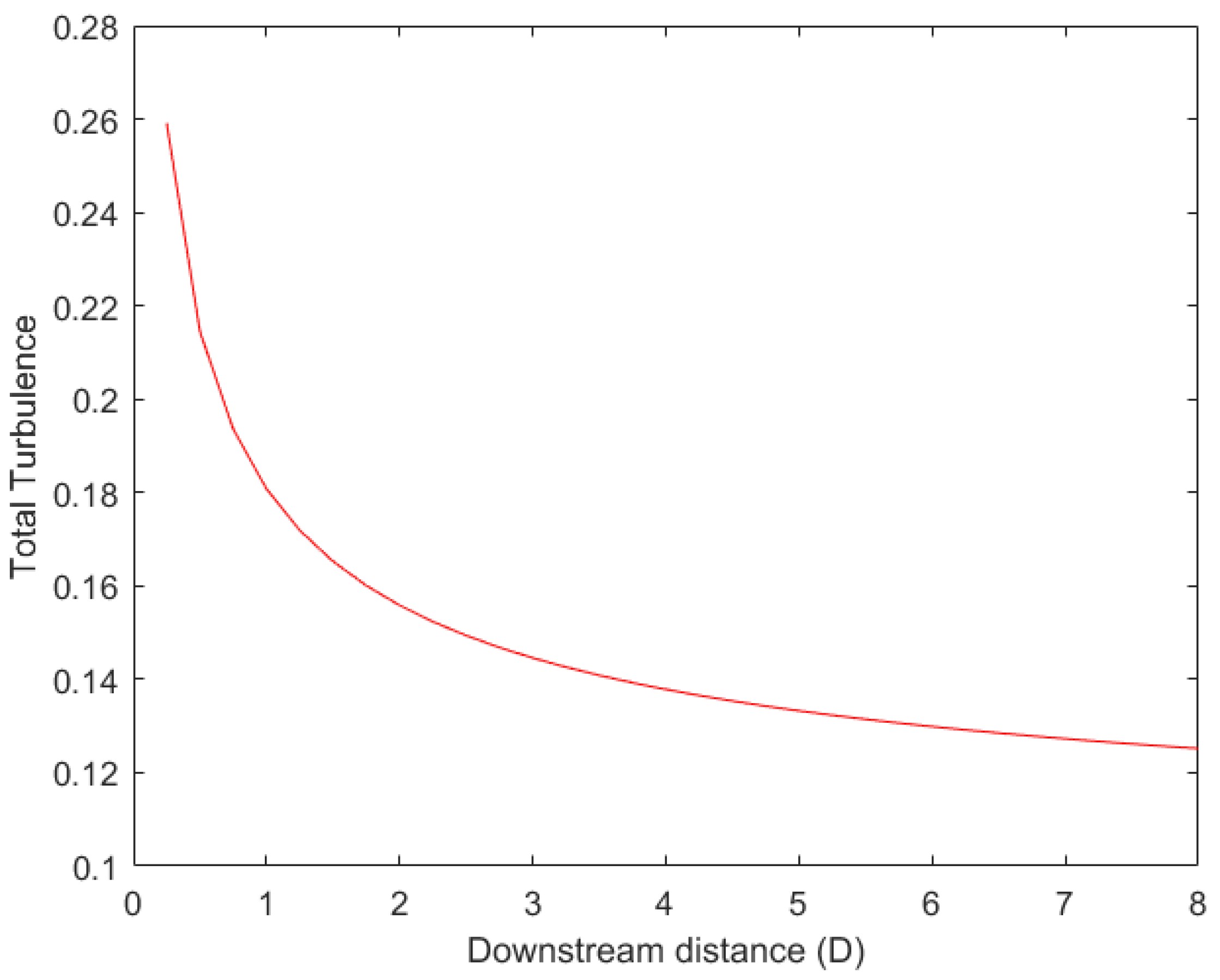
considered for the wake analysis is 12.5 m/s, which is the rated wind speed of the reference wind turbine used for this study. The normalized average velocity profile along the downstream distance for a selected wind turbine is shown in
Figure 4. It can be seen that there is a velocity deficit (u2 < u1) behind the rotor which can be correlated to the wind turbine wake that is surrounded by the varying turbulence intensity depicted in
Figure 5. The turbulence intensity is related to the mean wind speed in the wake and the standard deviation (
) in mean wind speed as
[
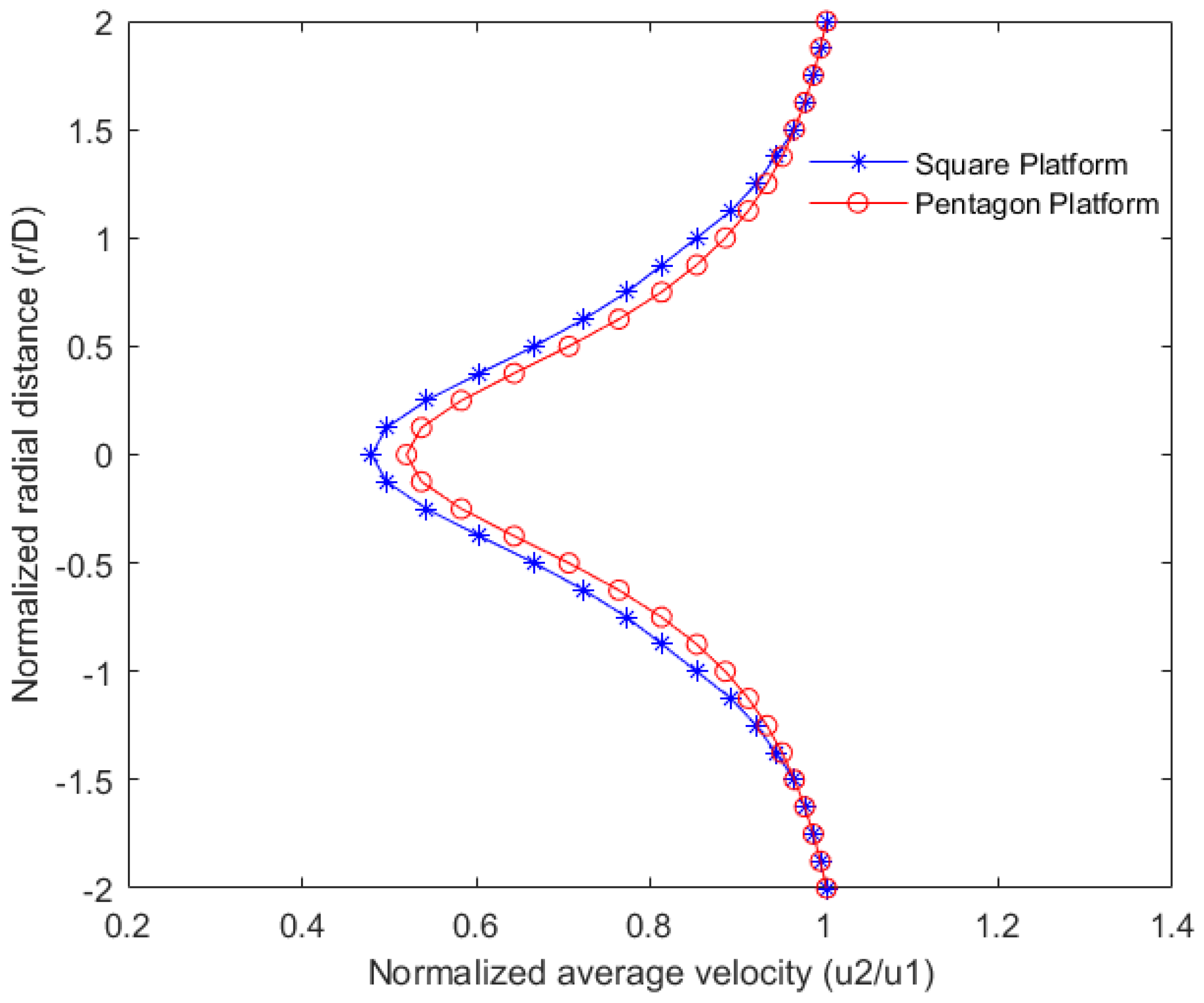
46]. The streamwise velocity profiles near the downstream wind turbine at a 2.75 D
r distance downstream in the wake for the square (T3) and pentagon platform (T5) configurations are depicted in
Figure 6. The velocity profile for the hexagon platform is not considered because it will be similar to the square platform as the downstream wind turbines in both cases are in the direct wake. The normalized average velocity along the radial distance for the square platform wind turbine is slightly lower relative to the pentagon platform near the center, which can correspond to the fact that the downstream wind turbine (T3 and T4) for the square platform is in direct wake, whereas for the pentagon platform (T5) it is in the partial wake. However, the normalized velocities in both cases become equal between 1 and 1.5 times the diameter distance.
In this study, the rotors of the configurations are modeled using an actuator disk technique [
44]. The rectangular computational domain of dimensions 20D(X) × 15D(Y) is created in the ANSYS design modeler. The discretization of the model is performed using quadrilateral elements by employing refinement at the rotors. The wall boundary condition is imposed on the top and bottom boundaries of the computational domain. The three grid refinement levels used for generating the number of elements for the square configuration, pentagon configuration, and hexagon configuration are presented in
Table 2. Different numbers of quadrangular layers and growth rates were used to develop the three meshes. An inflation tool with a growth rate of 1.2, 1.1, and 1.05 was used to obtain various levels of quadrangular cells in the boundary layer of the rotor disk so that y
+ is less than 1, as necessary by turbulence models [
43,
47,
48]. To obtain the grid-independent results, different levels of grid refinements were tested in ANSYS Fluent to reach y
+ < 1 for all the conditions of the rotor.
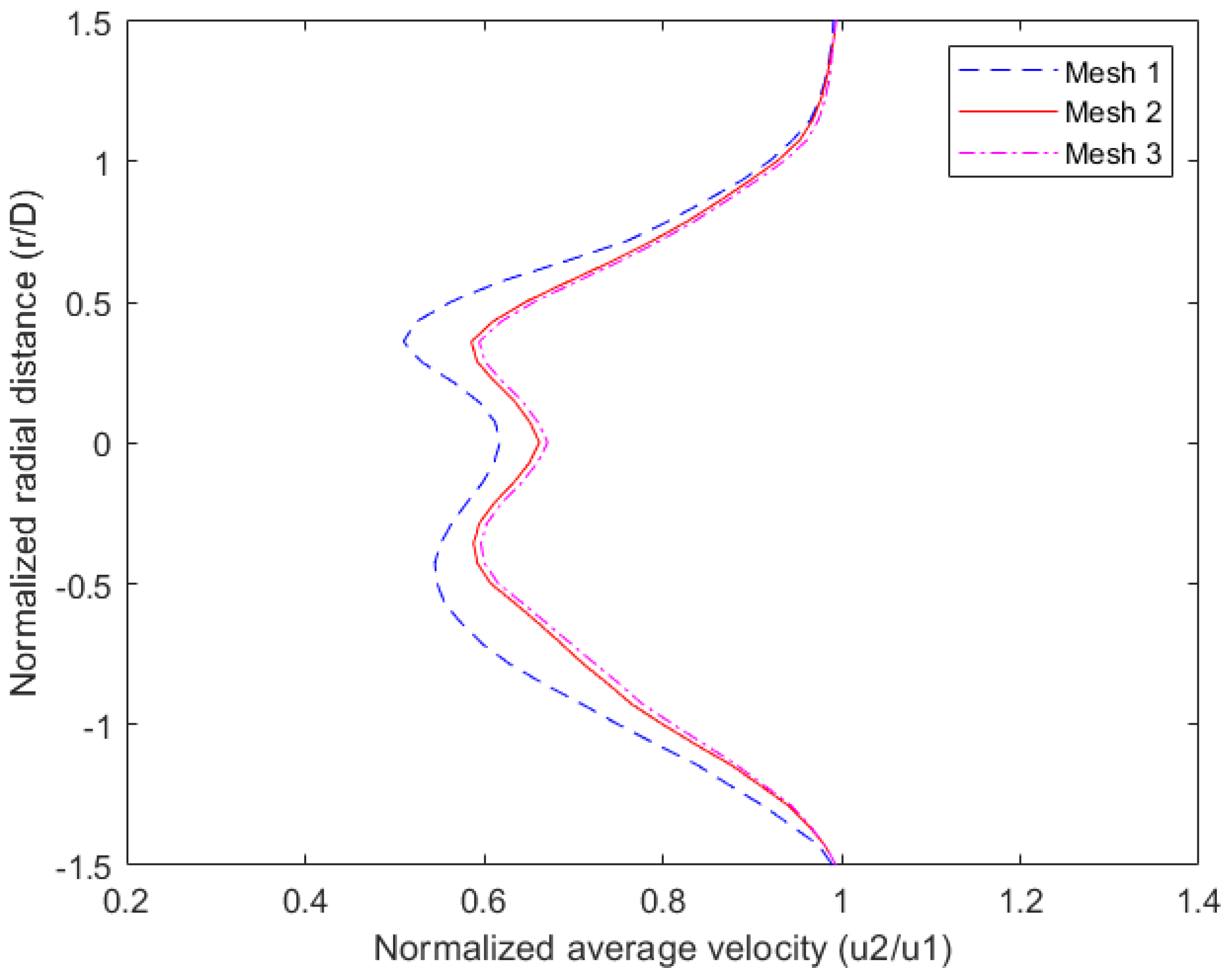
Figure 7 presents the mesh sensitivity study results in terms of a normalized velocity profile for turbine 5 of the pentagon platform configuration. This sensitivity study showed that mesh 2 and mesh 3 have approximately similar results and were found to have a satisfactory computational speed and accuracy, valid for all the simulated operating conditions.
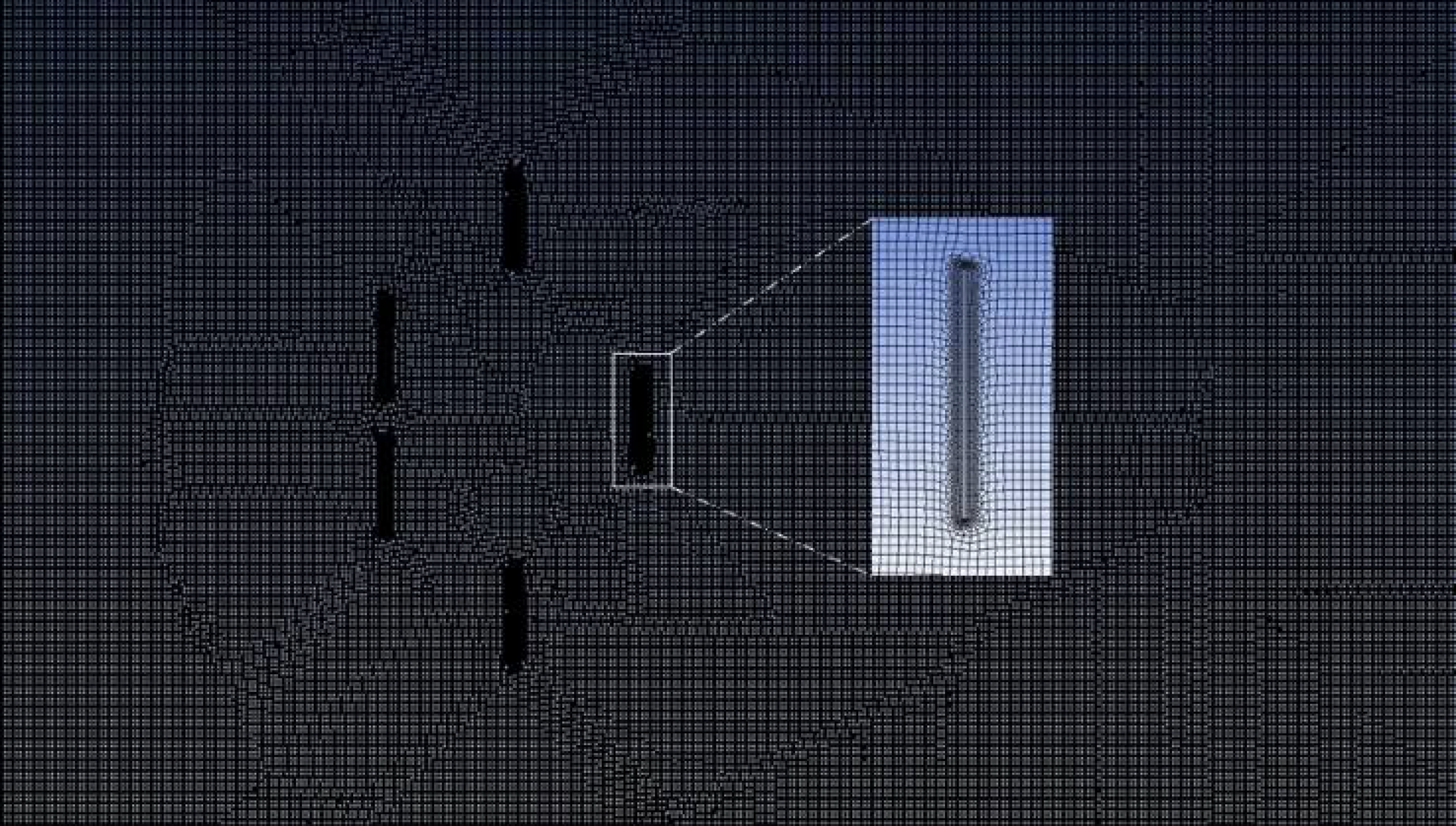
The discretized model of the pentagon configuration of mesh 2 is shown in
Figure 8. The pressure-based coupled algorithm is used as the solution method for solving the momentum and continuity equations with second-order upwind discretization for the convection terms of the flow equations. A uniform wind speed of 12.5 m/s is used as a velocity inlet boundary condition with an atmospheric turbulence intensity of 10% and a viscosity ratio of 10%. The atmospheric pressure is selected as the outlet boundary condition. The value of the residual used for obtaining the convergence criteria of the CFD analysis is below 10
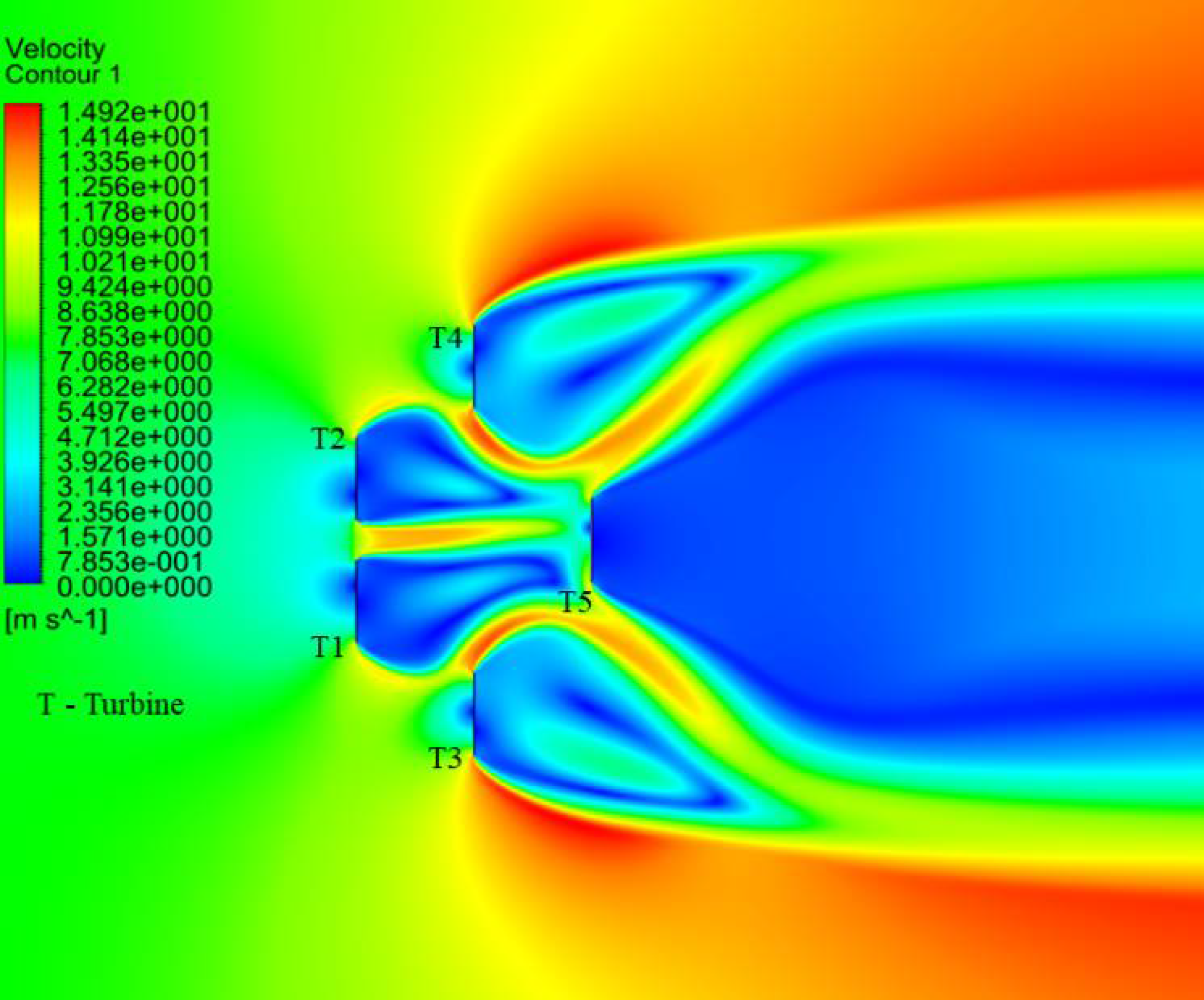
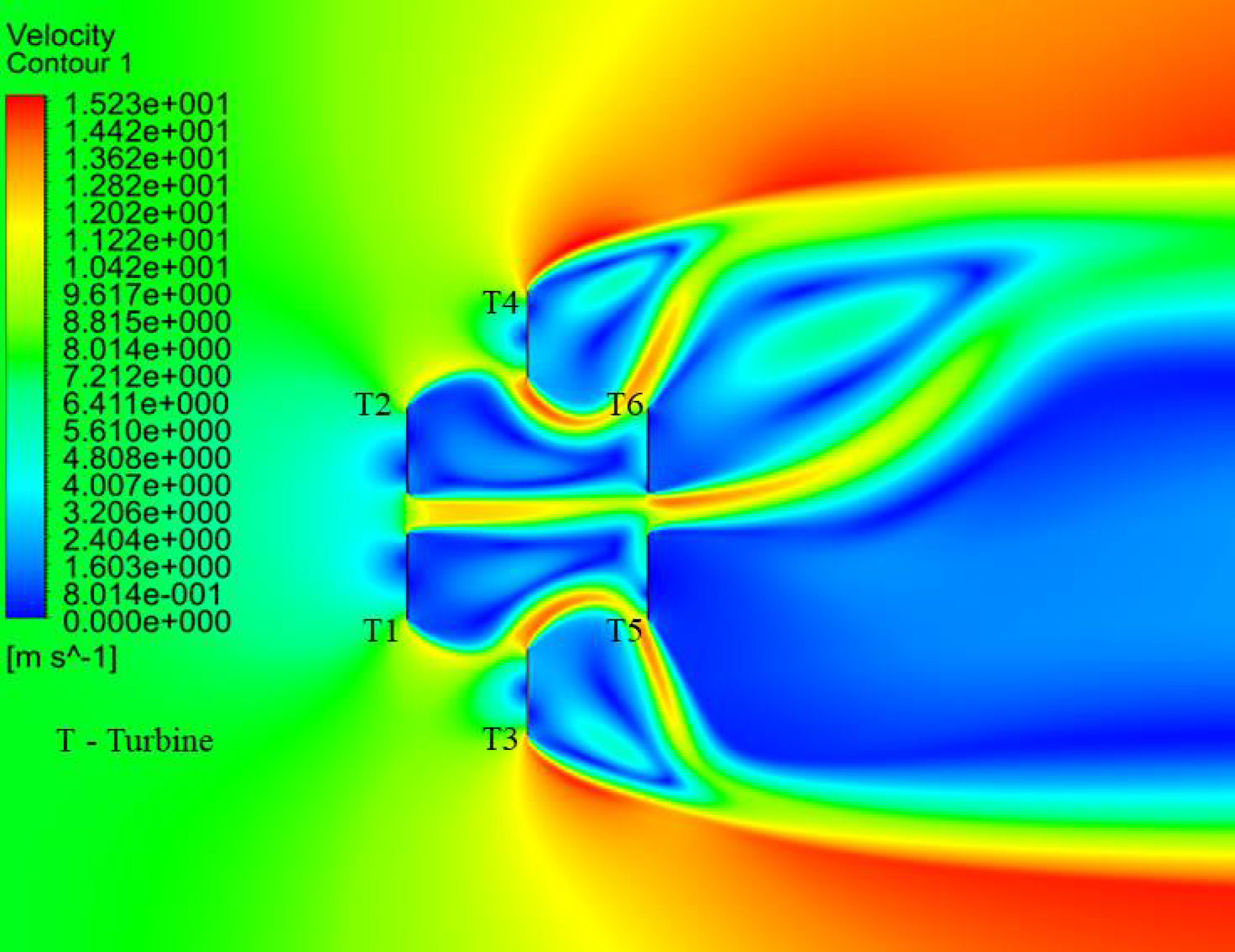
−4. The velocity contours of the three platform configurations are shown in
Figure 9,
Figure 10 and
Figure 11. It can be observed that there is a velocity deficit downstream of the wind turbines in all cases which corresponds to the wind turbine wake that is surrounded by the varying turbulence intensity, as shown in
Figure 12.
The normalized velocity profile for the downstream wind turbine at a 2.75 D
r distance downstream for the three platform configurations (T3 for square, T5 for the pentagon and hexagon) is depicted in
Figure 13. The velocity profile is approximately similar for the most part in the square and hexagon platforms as the wind turbines are in the direct wake. It can also be observed that the velocity for the pentagon configuration is slightly higher than in the other two cases, which can correlate to the values from the Larsen wake loss model shown in
Figure 6.
For the hexagon platform, the top part of the curve shows a reduced velocity due to the presence of the wind turbine (T6) at a 1D rotor diameter. The normalized velocity profile of the analytical Larsen wake model and CFD results at the downstream wind turbine of the pentagon platform is shown in
Figure 14.
Table 3 shows the comparison between the Larsen wake model and CFD analysis values of normalized streamwise velocity near the downstream wind turbine in the wake for the three platform configurations. The values show a good comparison between the analytical Larsen wake model values and the CFD simulation results.
The mean value of normalized streamwise velocity for the wind turbine in the wake in all three cases is approximately equal. However, for the square and hexagon platform configurations, the wake deficit is twice the pentagon platform because of the two wind turbines in direct wake, which means there will be twice the loss in power production. Hence, the pentagon platform configuration is selected for the design of the offshore floating multi-wind turbine platform.
3.3. Hydrostatic Analysis
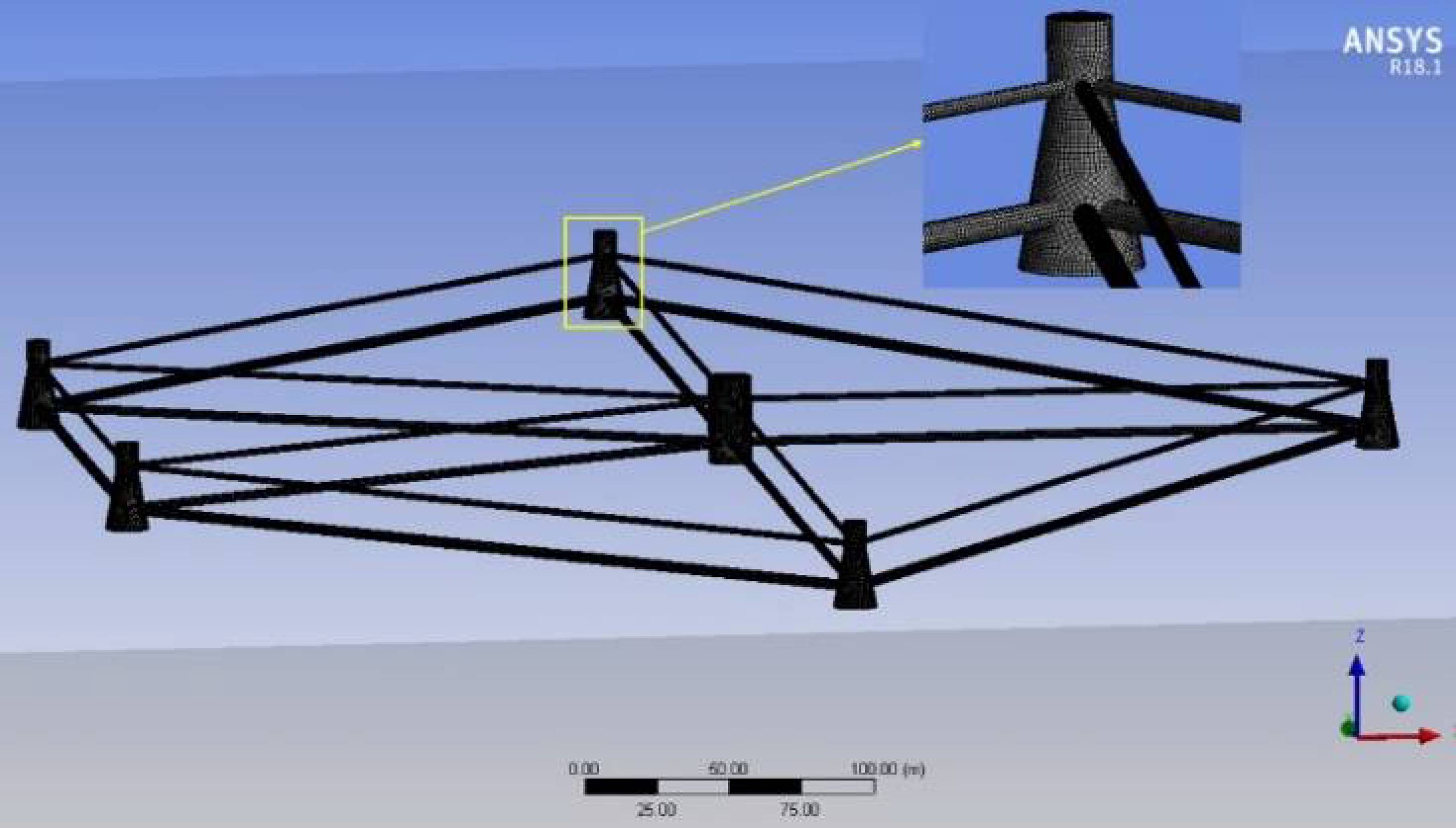
The hydrostatic performance of the free-floating offshore platform in seawater with a water depth of 250 m is calculated using ANSYS AQWA. The discretized model of the offshore floating platform configuration is shown in
Figure 17.
The hydrostatic stability analysis is used to calculate the ability of the platform to float and keep an upright position in normal environmental conditions. The platform needs to support the overall weight and restrain roll, pitch, and heave motions by providing enough buoyancy [
50]. The center of buoyancy,
is calculated based on the platform draft of 15 m, as follows [
51]:
where
is a point on a submerged body,
is the buoyancy force, and
is the volumetric displacement of the water. The center of gravity, the center of floatation, and the center of buoyancy calculated from the hydrostatic analysis are shown in
Table 6. An active ballast system can be used to balance the location of the center of gravity at the center column. The ballast needed to achieve the desired draft of 15 m is calculated to be 18,930 m
3. The ballast requirement is fulfilled by using the seawater filled in the platform columns.
The semi-submersible platform concept depends on the large waterplane area, draft, and ballast for maintaining stability. The stability requirements for the operating conditions of the wind turbine are mainly focused on the platform roll (rotation about the x-axis), pitch (rotation about the y-axis), and heave (translation in the z-axis) motions. The hydrostatic stiffness values evaluated from the hydrostatic analysis are presented in
Table 7. These values of the hydrostatic restoring coefficients show that the platform is stable in all three cases of motion responses. Hydrostatic stiffness is the major contributor to the system stiffness of offshore floating platforms that use slack-type moorings. For the platform to be stable, the stiffness coefficients must oppose small displacements in the platform. The necessary condition in heave, roll, and pitch is that the stiffness values are positive, as provided in
Table 7. For heave, this is possible if the waterplane area is not zero, and for roll and pitch, the necessary condition is that the metacentric heights are positive, as shown in
Table 7 [
52].
3.4. Hydrodynamic Analysis
The prediction of the wave-body interaction between the floating platform and the waves is evaluated by performing the hydrodynamic analysis [
51,
53,
54]. The potential flow linear diffraction model is used to calculate the first-order hydrodynamics and wave loadings on the platform in the frequency domain using ANSYS AQWA. The simulation is carried out with encounter frequencies set as 50 for wave directions ranging from 180° to −180°. The added mass, pressures and motions, response amplitude operators (RAOs), and radiation damping are calculated in the hydrodynamic diffraction module. The stability analysis of the platform is carried out using the calculated parameters in the hydrodynamic response module. The structure interpolated pressure contour plot of the platform for a selected frequency of 1.2674 rad/s, incident wave amplitude of 1.5 m, and wave direction angle of 0° is computed as shown in
Figure 18.
The wave exciting force is calculated using the direct integration of the pressure on the body surface, and the hydrodynamic added mass and damping coefficient is therefore evaluated by the decomposition of the radiation force. The hydrodynamic added mass in the frequency domain for a selected frequency is shown in
Table 8.
The natural modes of the platform are found from the stability analysis in the hydrodynamic response module, as shown in
Table 9. The natural modes of the platform define the dynamic behavior of the platform.
The frequency response amplitude operator (RAO) for the heave, pitch, and roll motion of the floating platform is shown in
Figure 19,
Figure 20 and
Figure 21, respectively.
As can be seen in the above figures, the platform responses for the wave heading angle of 0° in all three cases are located below the frequency of 0.5 rad/s. It can also be observed that the frequency response in all three motions peaks around the natural frequency of the platform. The roll response is relatively low because the platform is symmetrical about the x-axis. However, the frequency responses of the pitch and heave motions have relatively higher values, and hence more attention should be paid to pitch and heave motions to ensure a good hydrodynamic performance of the offshore floating platform in coupled wind–wave conditions.
3.5. Cost Analysis
The preliminary cost analysis of the offshore floating multi-wind turbine platform is performed and compared with a conventional single floating wind turbine platform to evaluate the economic feasibility. The main costs considered for this analysis are offshore wind turbine costs (
), floating platform cost (
), mooring cost (
), and installation cost (
).
The cost of an offshore wind turbine is calculated based on the cost per MW (USD/MW) of energy generated (
) times the power rating (
) of the wind turbine [
55,
56,
57,
58].
The cost of the offshore floating platform is dependent on the cost of material and quantity of the material for the foundation, which can be calculated based on the mass of the platform (
) and the cost per ton of steel (
).
The mooring cost is calculated considering the length of the mooring (
), number of mooring lines (
), mass per unit length in kg/m (
), and the cost per kg of mooring (
).
The installation costs of the system include the installation and transportation costs of the wind turbines, platform, and mooring system.
The values of the parameters [
59,
60,
61] considered for the total cost calculation of the multi-turbine platform are presented in
Table 10. Based on the parameter values considered, the total cost per kW (USD/MW) of energy generated for the offshore floating multi-wind turbine platform to install five 8 MW wind turbines is evaluated to be USD1,880,800/MW. For a single wind turbine platform, the total cost per kW (USD/kW) of energy is found to be USD2,025,500/MW, which is significantly higher than the multi-turbine platform. This difference is because of the reduction of mooring and transportation costs in the case of a multi-turbine platform as the five wind turbines use common mooring lines and they are transported with the platform to the installation site after the assembly at the dock. Hence, the proposed multi-wind turbine platform design is a promising concept that can enhance the offshore wind industry.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}