
Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle

 ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Implementation of acoustic target strength for underwater submarine vehicles;
- Comparison of target strength in different acoustic pressure conditions;
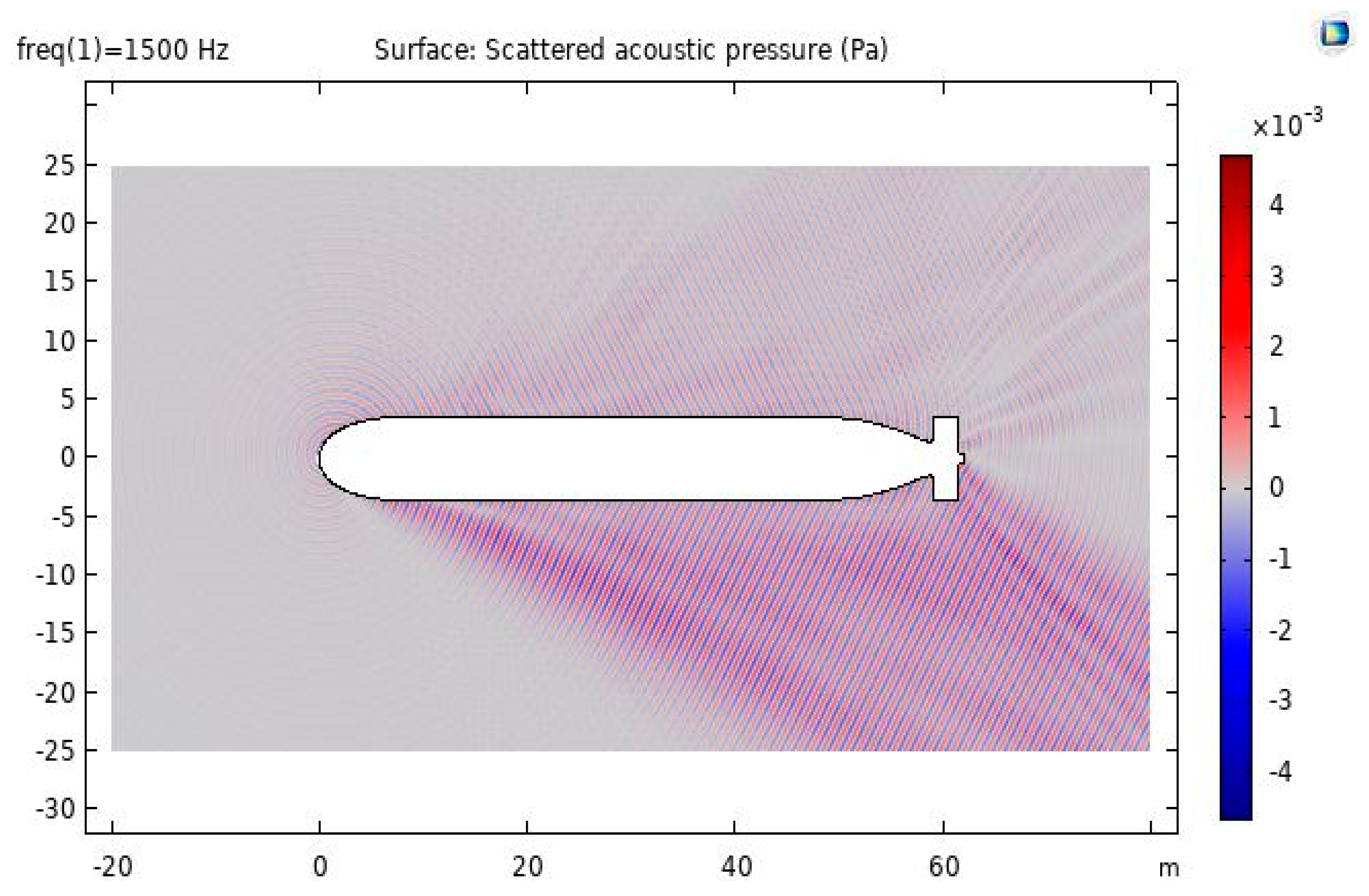
- Analysis of the scattered acoustic sound pressure levels;
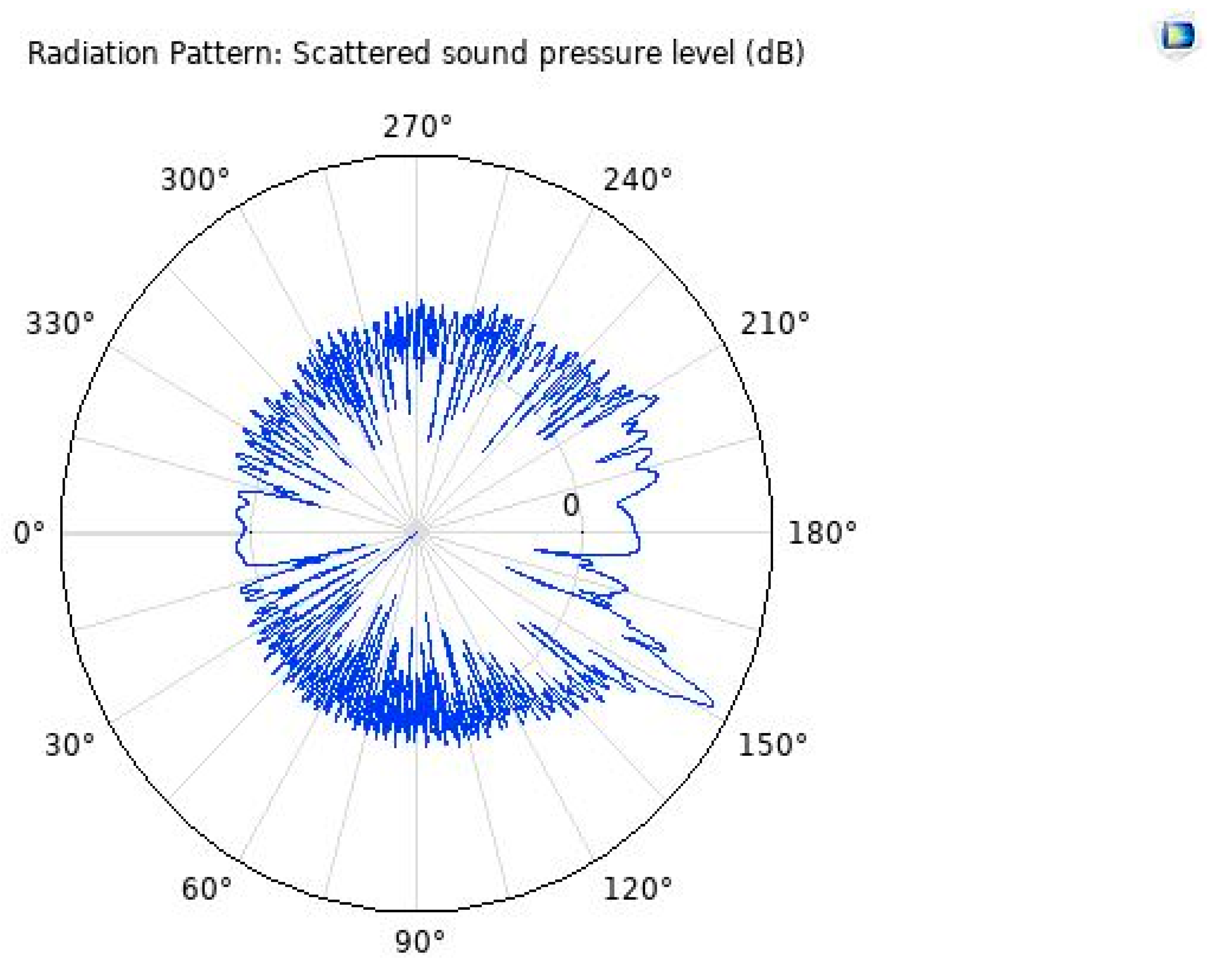
- Examination of the radiation pattern in both polar plot and line graph;
- Recommendation of appropriate scattered acoustic sound pressure levels for underwater networks based on the targeted performance metric.
2. Theoretical Definition of a Proposed Model
- ➢
- In the second stage, we assign geometry and global definitions to the model builder;
- ➢
- The third step is to configure the pressure acoustics and boundary elements to the model and run simulations of possible model configurations.
- ➢
- In fourth place, we have a comparison of the results of various valuations of the performance metrics;
- ➢
- The last stage is collection of the analysis and explanation of the results.
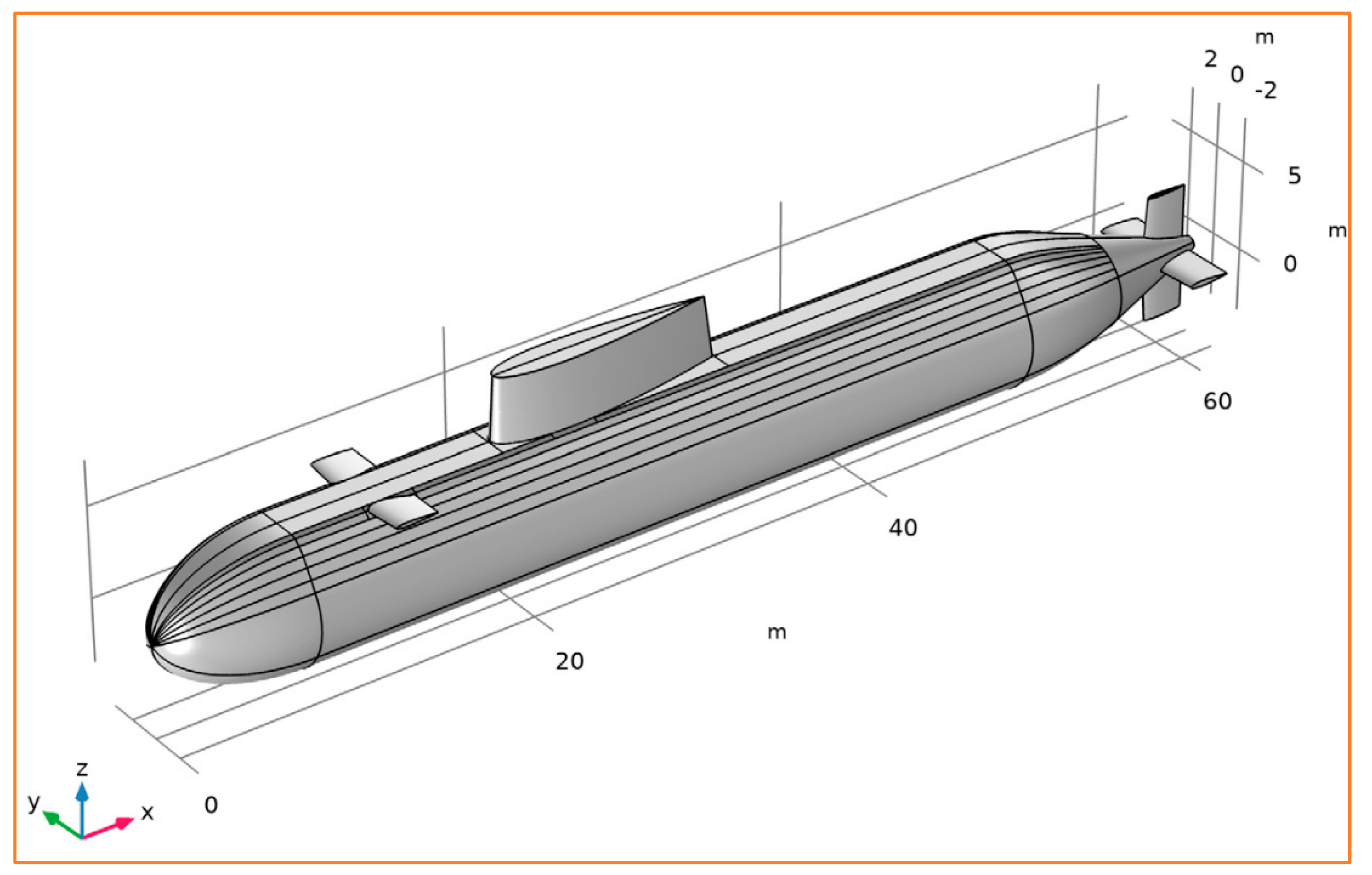
3. Design Model and Methodology
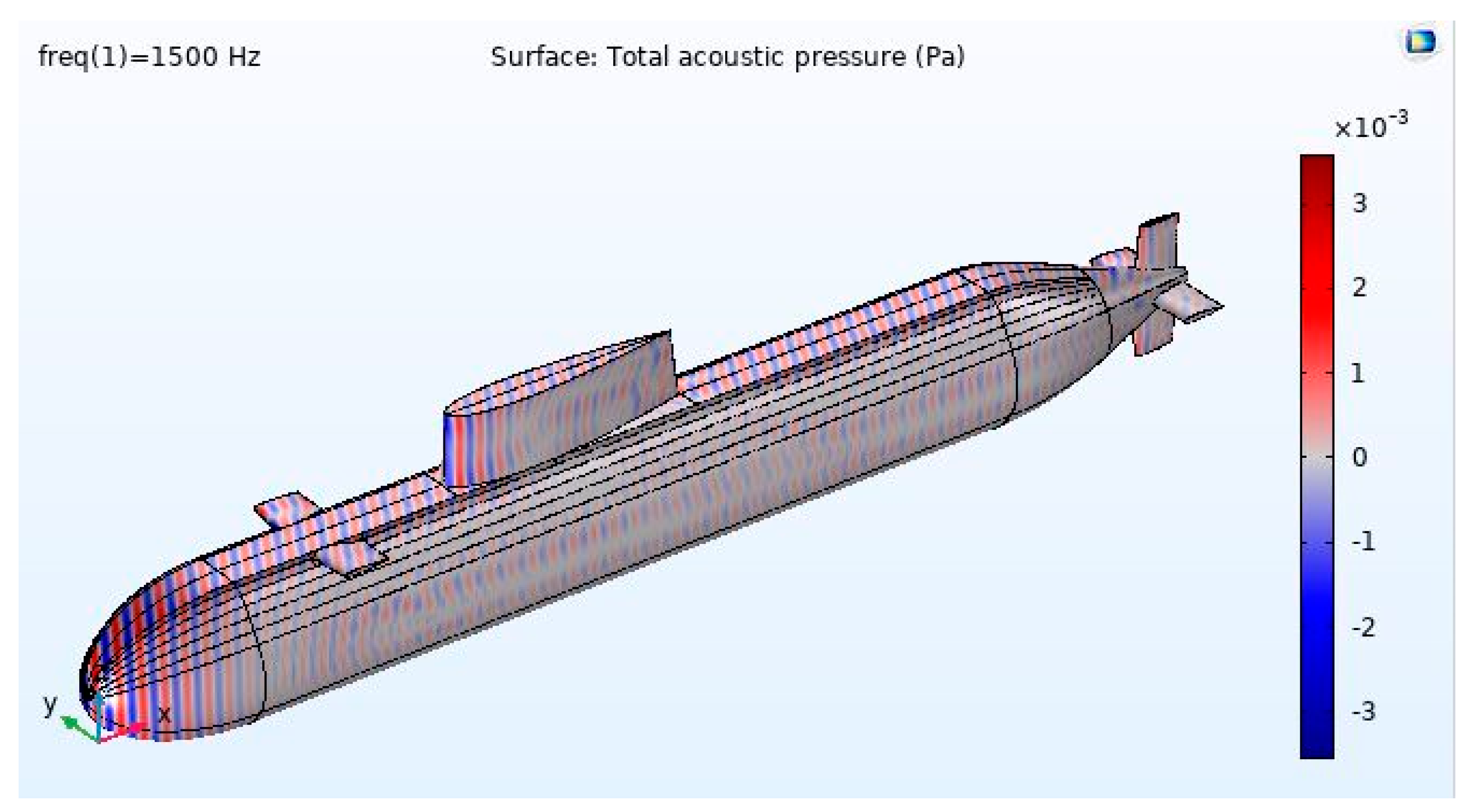
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zampolli, M.; Tesei, A.; Jensen, F.B.; Malm, N.; Blottman, J.B. A computationally efficient finite element model with perfectly matched layers applied to scattering from axially symmetric objects. J. Acoust. Soc. Am. 2007, 122, 1472–1485. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Srinivasulu, A.; Rajesh, A.; Oyerinde, O.O. Performance and Improvement Analysis of the Underwater WSN Using a Diverse Routing Protocol Approach. J. Comput. Netw. Commun. 2022, 2022, 9418392. [Google Scholar] [CrossRef]
- Fang, Z.; Hu, W.; Zhang, W.; Chen, S. Kernel correlation filtering multi-object tracking algorithm based on background difference method. Electron. Meas. Technol. 2018, 41, 68–72. [Google Scholar]
- Erol, M.; Vieira, L.F.M.; Caruso, A.; Paparella, F.; Gerla, M.; Oktug, S. Multi Stage Underwater Sensor Localization Using Mobile Beacons. In Proceedings of the 2008 Second International Conference on Sensor Technologies and Applications, Washington, DC, USA, 25–31 August 2008; pp. 710–714. [Google Scholar] [CrossRef]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC 2006), Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 228–235. [Google Scholar] [CrossRef]
- Sathish, K.; Ravikumar, C.V.; Rajesh, A.; Pau, G. Underwater Wireless Sensor Network Performance Analysis Using Diverse Routing Protocols. J. Sens. Actuator Netw. 2022, 11, 64. [Google Scholar] [CrossRef]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applica-tions. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Wang, K.; Gao, H.; Xu, X.; Jiang, J.; Yue, D. An Energy-Efficient Reliable Data Transmission Scheme for Complex Environmental Monitoring in Underwater Acoustic Sensor Networks. IEEE Sens. J. 2015, 16, 4051–4062. [Google Scholar] [CrossRef]
- Awan, K.M.; Shah, P.A.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater Wireless Sensor Networks: A Review of Recent Issues and Challenges. Wirel. Commun. Mob. Comput. 2019, 2019, 6470359. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization Algorithms of Underwater Wireless Sensor Networks: A Survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef] [Green Version]
- Sathish, K.; Ravikumar, C.V.; Srinivasulu, A.; Gupta, A.K. Performance Analysis of Underwater Wireless Sensor Network by Deploying FTP, CBR, and VBR as Applications. J. Comput. Netw. Commun. 2022, 2022, 1–30. [Google Scholar] [CrossRef]
- Yuan, F.; Zhan, Y.; Wang, Y. Data Density Correlation Degree Clustering Method for Data Aggregation in WSN. IEEE Sens. J. 2013, 14, 1089–1098. [Google Scholar] [CrossRef]
- Agarwal, R.; Kumar, S.; Hegde, R.M. Algorithms for Crowd Surveillance Using Passive Acoustic Sensors over a Multimodal Sensor Network. IEEE Sens. J. 2014, 15, 1920–1930. [Google Scholar] [CrossRef]
- Teja, G.S.; Samundiswary, P. Performance analysis of DYMO protocol for IEEE 802.15. 4 based WSNs with mobile nodes. In Proceedings of the Computer Communication and Informatics (ICCCI), Coimbatore, India, 3–5 January 2014; pp. 1–5. [Google Scholar]
- Ravikumar, C.V.; Kala Praveen, B. Detection of Signals in MC-CDMA Using a Novel Iterative Block Decision Feedback Equalizer. IEEE Access 2022, 10, 105674–105684. [Google Scholar] [CrossRef]
- Domingo, M.C.; Prior, R. Energy analysis of routing protocols for underwater wireless sensor networks. Comput. Commun. 2008, 31, 1227–1238. [Google Scholar] [CrossRef]
- Patil, M.S.A.; Mishra, M.P. Improved mobicast routing protocol to minimize energy consumption for underwater wireless sensor networks. Int. J. Res. Sci. Eng. 2017, 3, 197–204. [Google Scholar]
- Manjula, S.H.; Abhilash, C.N.; Shaila, K.; Venugopal, K.R.; Patnaik, L.M. Performance of AODV routing protocol using group and entity mobility models in wireless sensor networks. In Proceedings of the International MultiConference of Engineers and Computer Scientist (IMECS 2008), Hong Kong, China, 19–21 March 2008; Volume 2, pp. 1212–1217. [Google Scholar]
- Xiao, X.; Huang, H.; Wang, W. Underwater Wireless Sensor Networks: An Energy-Efficient Clustering Routing Protocol Based on Data Fusion and Genetic Algorithms. Appl. Sci. 2021, 11, 312. [Google Scholar] [CrossRef]
- Bhattacharjya, K.; Alam, S.; De, D. CUWSN: Energy efficient routing protocol selection for cluster based underwater wireless sensor network. Microsyst. Technol. 2019, 28, 543–559. [Google Scholar] [CrossRef]
- Mohan, P.; Subramani, N.; Alotaibi, Y.; Alghamdi, S.; Khalaf, O.I.; Ulaganathan, S. Improved Metaheuristics-Based Clustering with Multihop Routing Protocol for Underwater Wireless Sensor Networks. Sensors 2022, 22, 1618. [Google Scholar] [CrossRef]
- Alkindi, Z.; Alzeidi, N.; Touzene, B.A.A. Performance evolution of grid based routing protocol for underwater wireless sensor networks under different mobile models. Int. J. Wirel. Mob. Netw. 2018, 10, 13–25. [Google Scholar]
- Han, L.; Li, Z.; Liu, W.; Qu, W.; Nie, L.; Zheng, L.; Liu, M. Sensor localization in underwater sensor networks using distance transform-based skeleton extraction. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 2223–2226. [Google Scholar] [CrossRef]
- Peng, R.; Sichitiu, M.L. Angle of arrival localization for wireless sensor networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 25–28 September 2006; pp. 374–382. [Google Scholar]
- Zhou, Y.; Chen, K.; He, J.; Chen, J.; Liang, A. A Hierarchical Localization Scheme for Large Scale Underwater Wireless Sensor Networks. In Proceedings of the 2009 11th IEEE International Conference on High Performance Computing and Communications, Seoul, Republic of Korea, 25–27 June 2009; pp. 470–475. [Google Scholar] [CrossRef]
- Ullah, I.; Ming-Sheng, G.A.O.; Kamal, M.M.; Khan, Z. A survey on an underwater localization, localization techniques and its algorithms. In 3rd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2017); Atlantis Press: Dordrecht, The Netherlands, 2017; pp. 252–259. [Google Scholar]
- Zarar, S.; Javaid, N.; Zaki, S.M.; Ejaz, M.; Khan, Z.A.; Qasim, U.; Hussain, S. Increased throughput db-ebh protocol in underwaer wireless sensor networks. In Proceedings of the 2016 30th International Conference on Advanced Information Networking and Applications Workshops (WAINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 571–576. [Google Scholar]
- Beniwal, M.; Singh, R. Localization techniques and their challenges in underwater wireless sensor networks. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 4706–4710. [Google Scholar]
- Thulasiraman, P.; White, K.A. Topology control of tactical wireless sensor networks using energy efficient zone routing. Digit. Commun. Netw. 2016, 2, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Pughat, A.; Sharma, V. Performance analysis of an improved dynamic power management model in wireless sensor node. Digit. Commun. Netw. 2017, 3, 19–29. [Google Scholar] [CrossRef]
- Qasim, M.; Khan, M.; Mehmood, W.; Sobieczky, F.; Pichler, M.; Moser, B. A Comparative Analysis of Anomaly Detection Methods for Predictive Maintenance in SME. In International Conference on Database and Expert Systems Applications; Springer: Cham, Switzerland, 2022; pp. 22–31. [Google Scholar] [CrossRef]
- Khan, M.; Ahmad, A.; Sobieczky, F.; Pichler, M.; Moser, B.A.; Bukovsky, I. A Systematic Mapping Study of Predictive Maintenance in SMEs. IEEE Access 2022, 10, 88738–88749. [Google Scholar] [CrossRef]
- Khan, M.; Liu, M.; Dou, W.; Yu, S. vGraph: Graph Virtualization towards Big Data. In Proceedings of the 2015 Third International Conference on Advanced Cloud and Big Data, Yangzhou, China, 30 October–1 November 2015; pp. 153–158. [Google Scholar] [CrossRef]
- Rafique, W.; Khan, M.; Sarwar, N.; Sohail, M.; Irshad, A. A Graph Theory Based Method to Extract Social Structure in the Society. In International Conference on Intelligent Technologies and Applications; Springer: Singapore, 2019; pp. 437–448. [Google Scholar] [CrossRef]
- Haindl, P.; Buchgeher, G.; Khan, M.; Moser, B. Towards a reference software architecture for human-AI teaming in smart manufacturing. arXiv 2022, arXiv:2201.04876. [Google Scholar] [CrossRef]
- Cv, R.; Sathish, K. Performance Analysis of Clustered Based Underwater Wireless Sensor Network by Deploying Application as CBR. In Proceedings of the 2022 Third International Conference on Intelligent Computing Instrumentation and Control Technologies (ICICICT), Kannur, India, 11–12 August 2022; pp. 1678–1686. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sathish, K.; Anbazhagan, R.; Venkata, R.C.; Arena, F.; Pau, G. Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle. Inventions 2022, 7, 111. https://doi.org/10.3390/inventions7040111
Sathish K, Anbazhagan R, Venkata RC, Arena F, Pau G. Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle. Inventions. 2022; 7(4):111. https://doi.org/10.3390/inventions7040111
Chicago/Turabian StyleSathish, Kaveripakam, Rajesh Anbazhagan, Ravikumar Chinthaginjala Venkata, Fabio Arena, and Giovanni Pau. 2022. "Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle" Inventions 7, no. 4: 111. https://doi.org/10.3390/inventions7040111
APA StyleSathish, K., Anbazhagan, R., Venkata, R. C., Arena, F., & Pau, G. (2022). Investigation and Numerical Simulation of the Acoustic Target Strength of the Underwater Submarine Vehicle. Inventions, 7(4), 111. https://doi.org/10.3390/inventions7040111