

Development of a 3D Printed New Metering Mechanism for a Multi-Crop Seed Broadcasting System Using an Autonomous Small-Scale Vehicle




Abstract
:1. Introduction
2. Materials and Methods
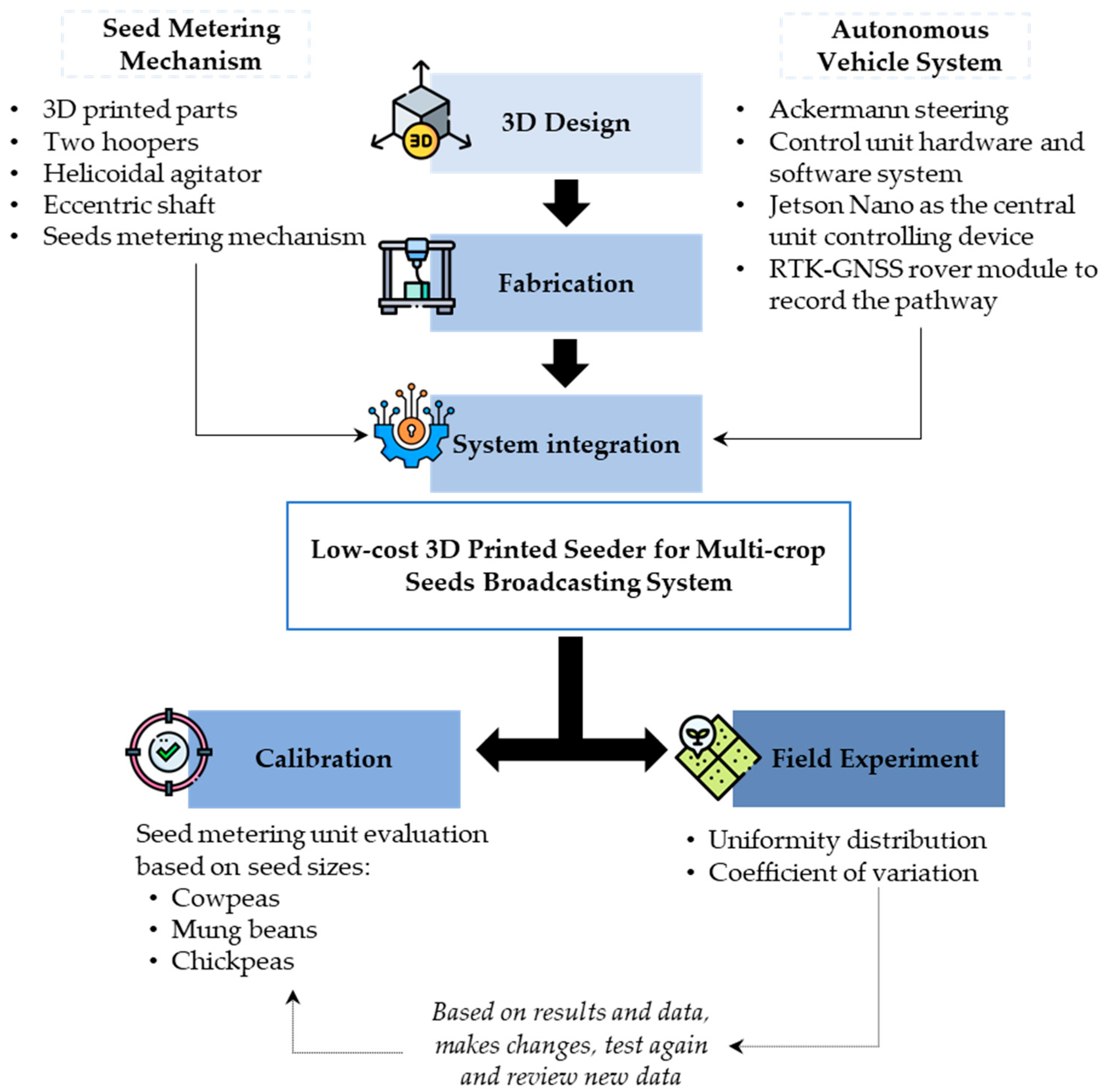
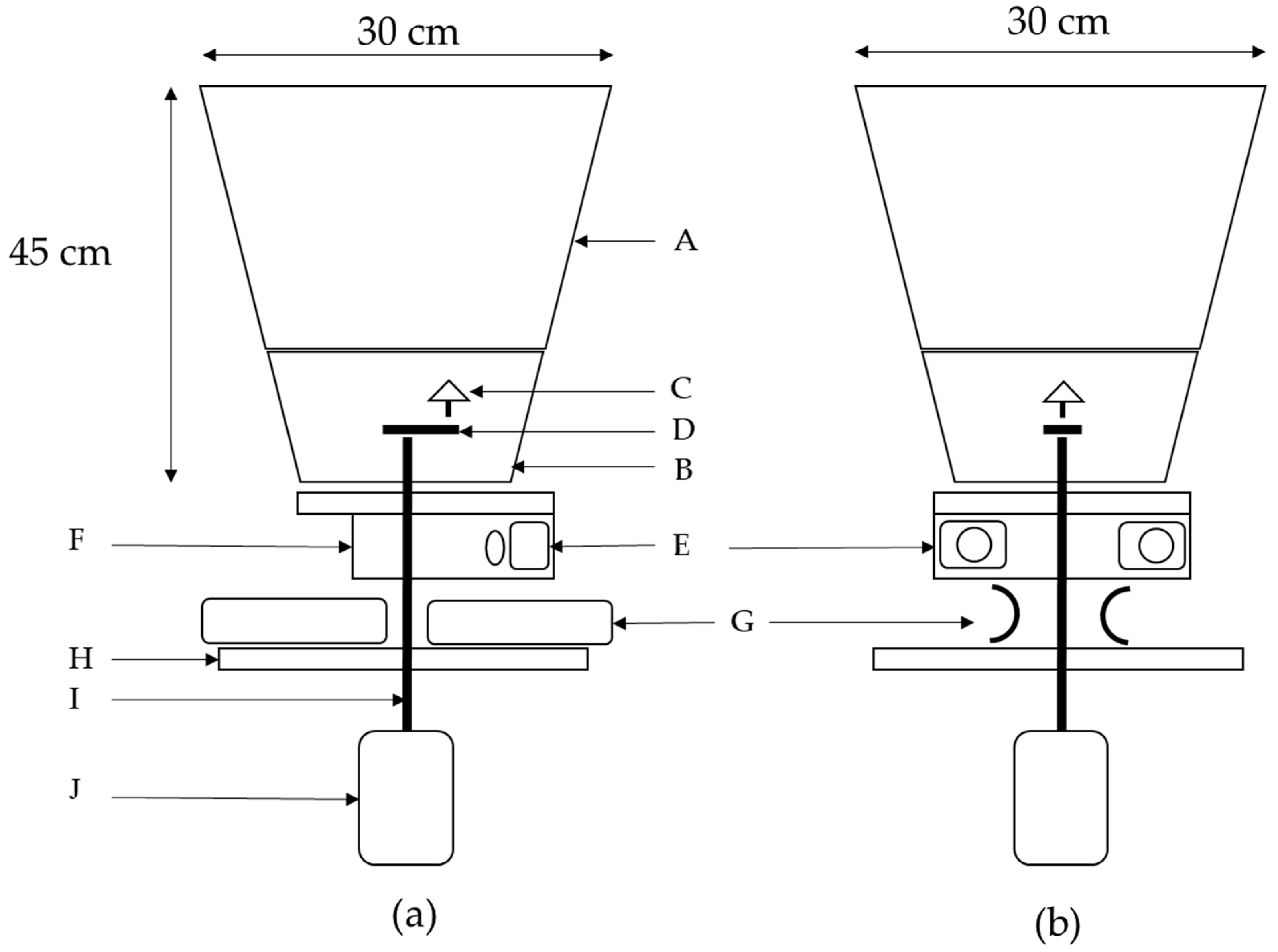
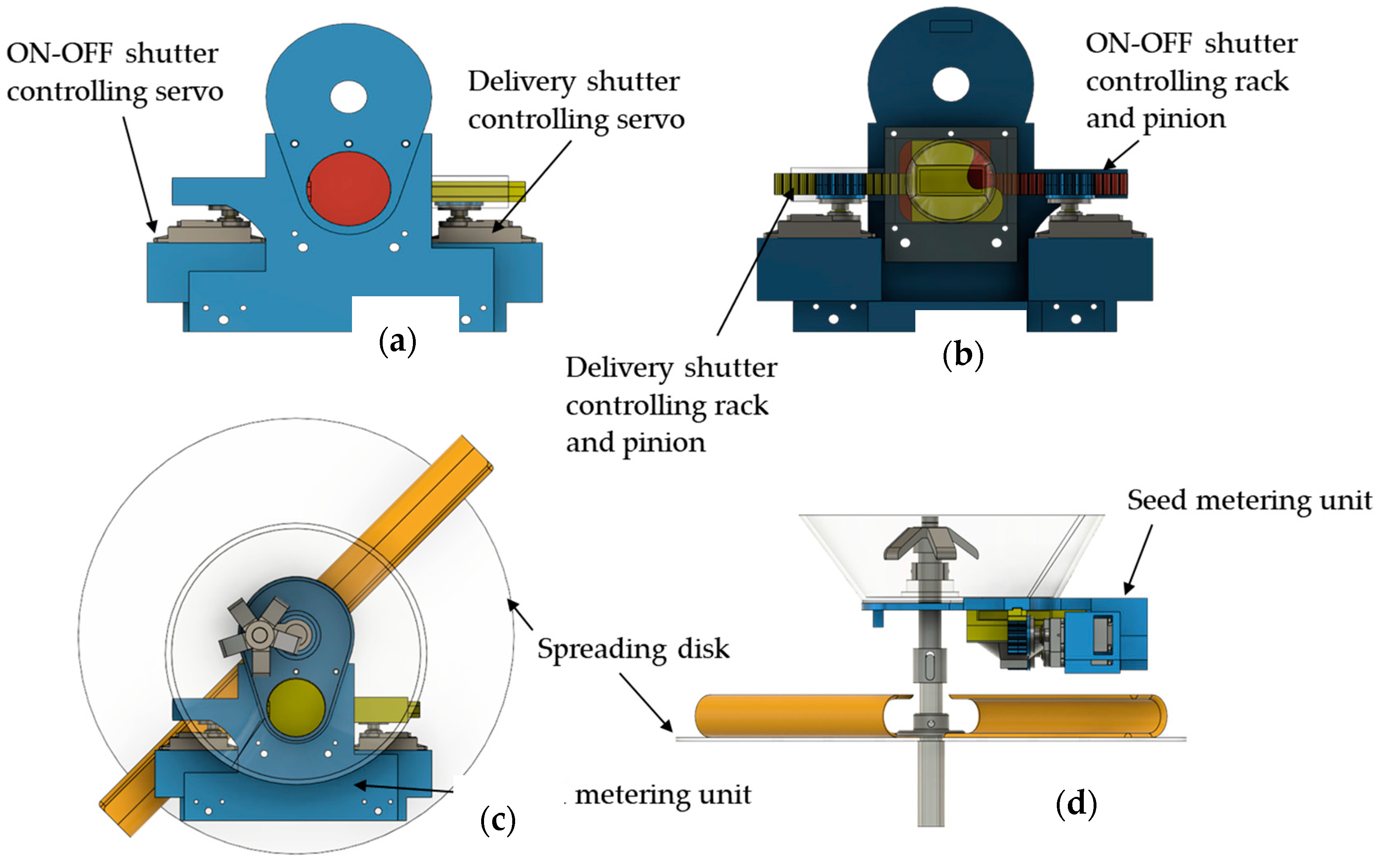
2.1. Design and Development of the Seed Broadcasting Device
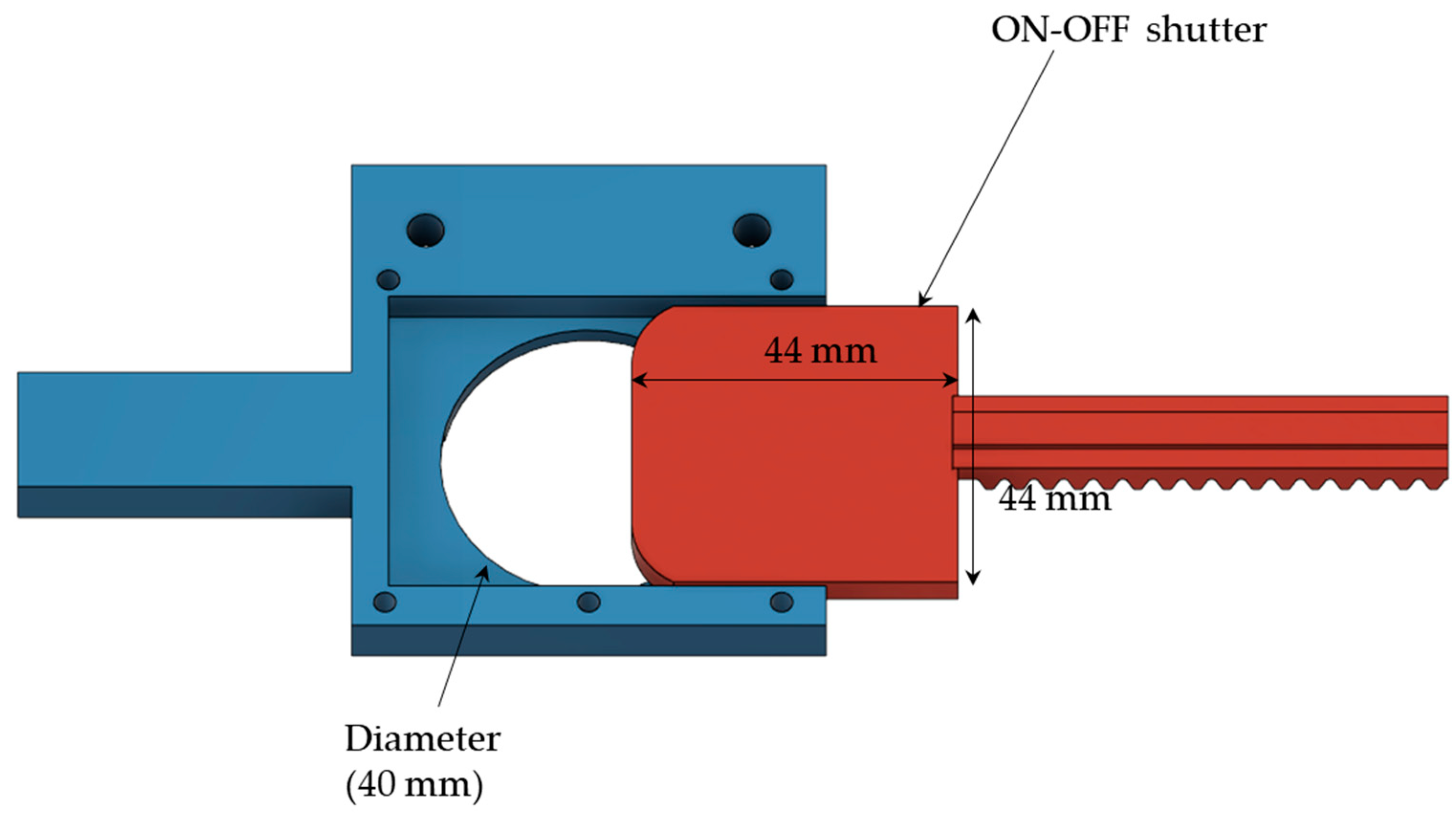
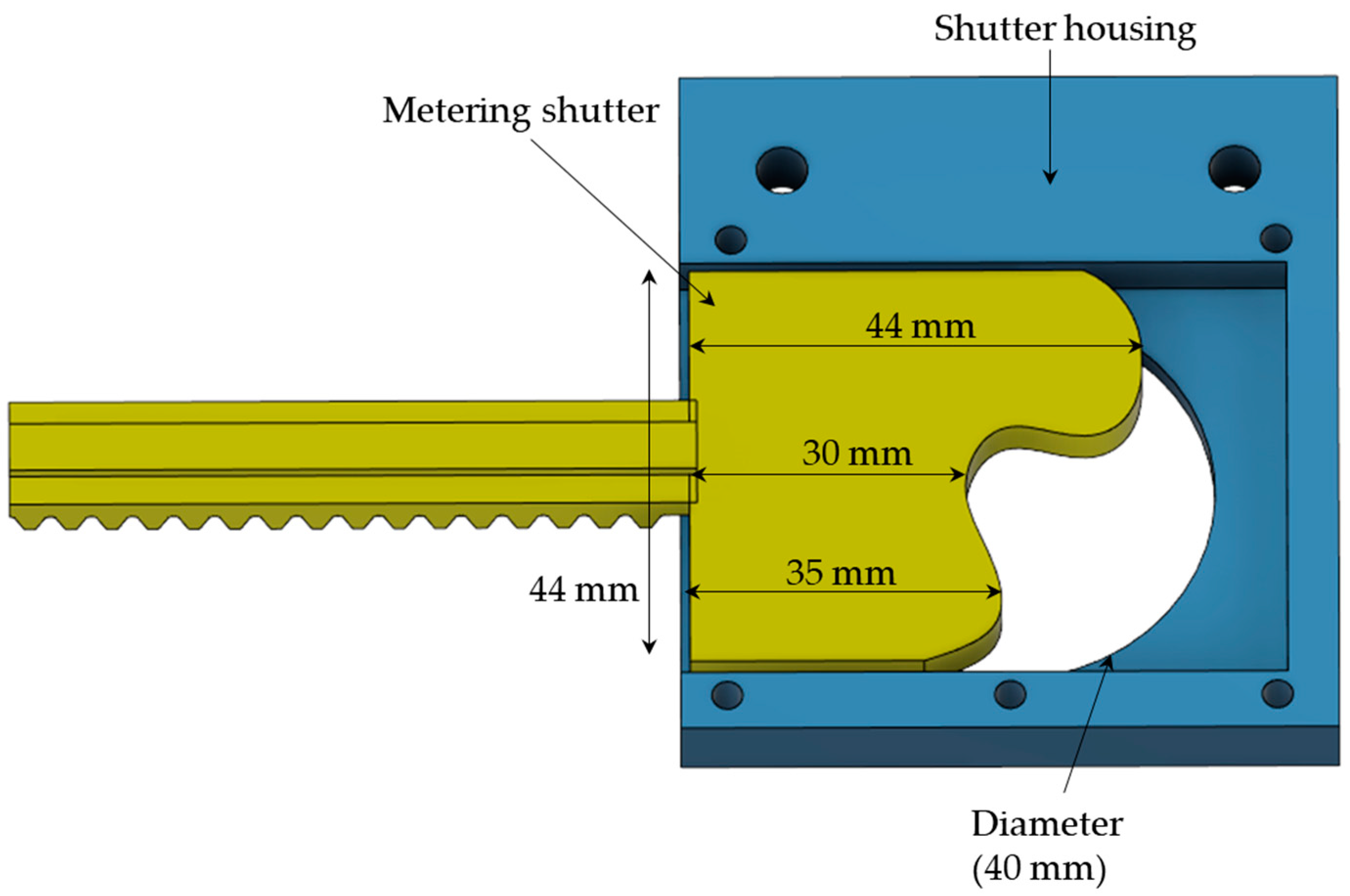
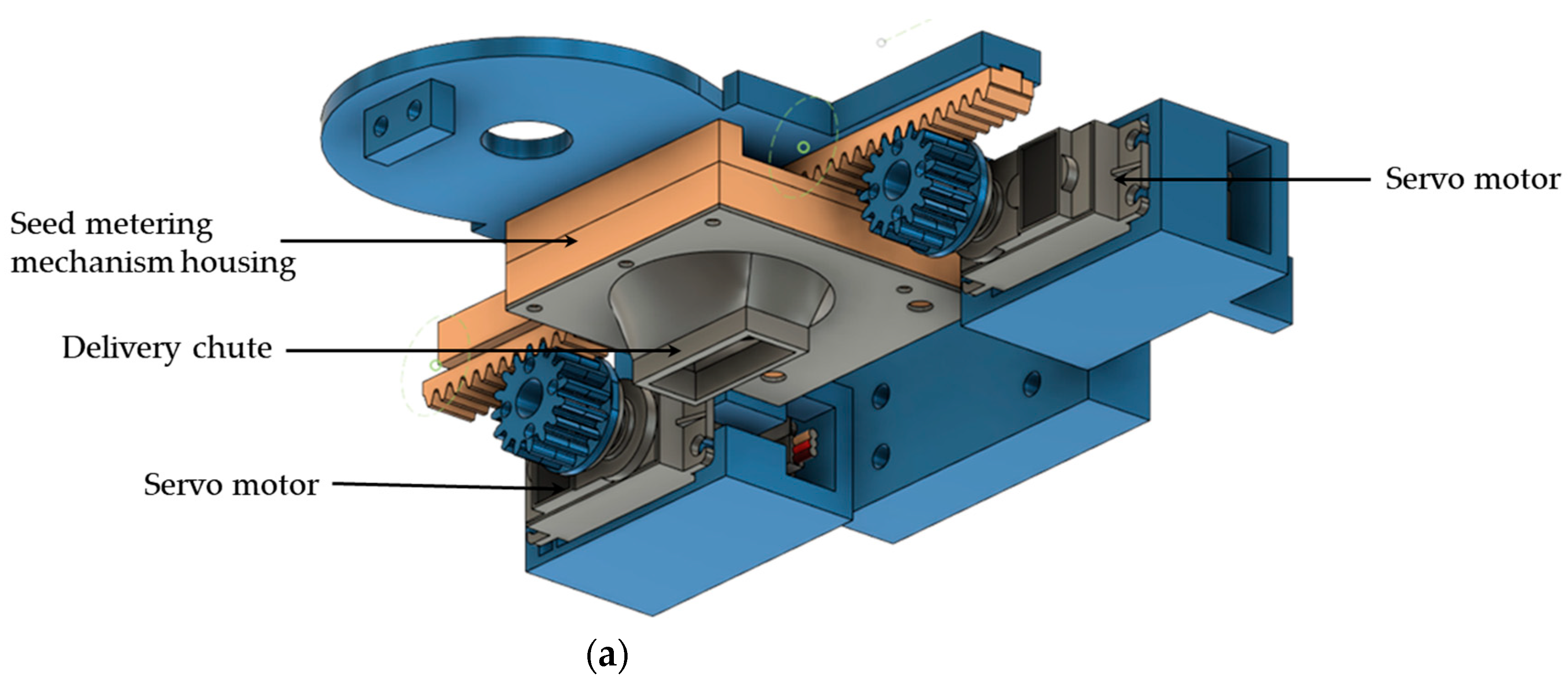
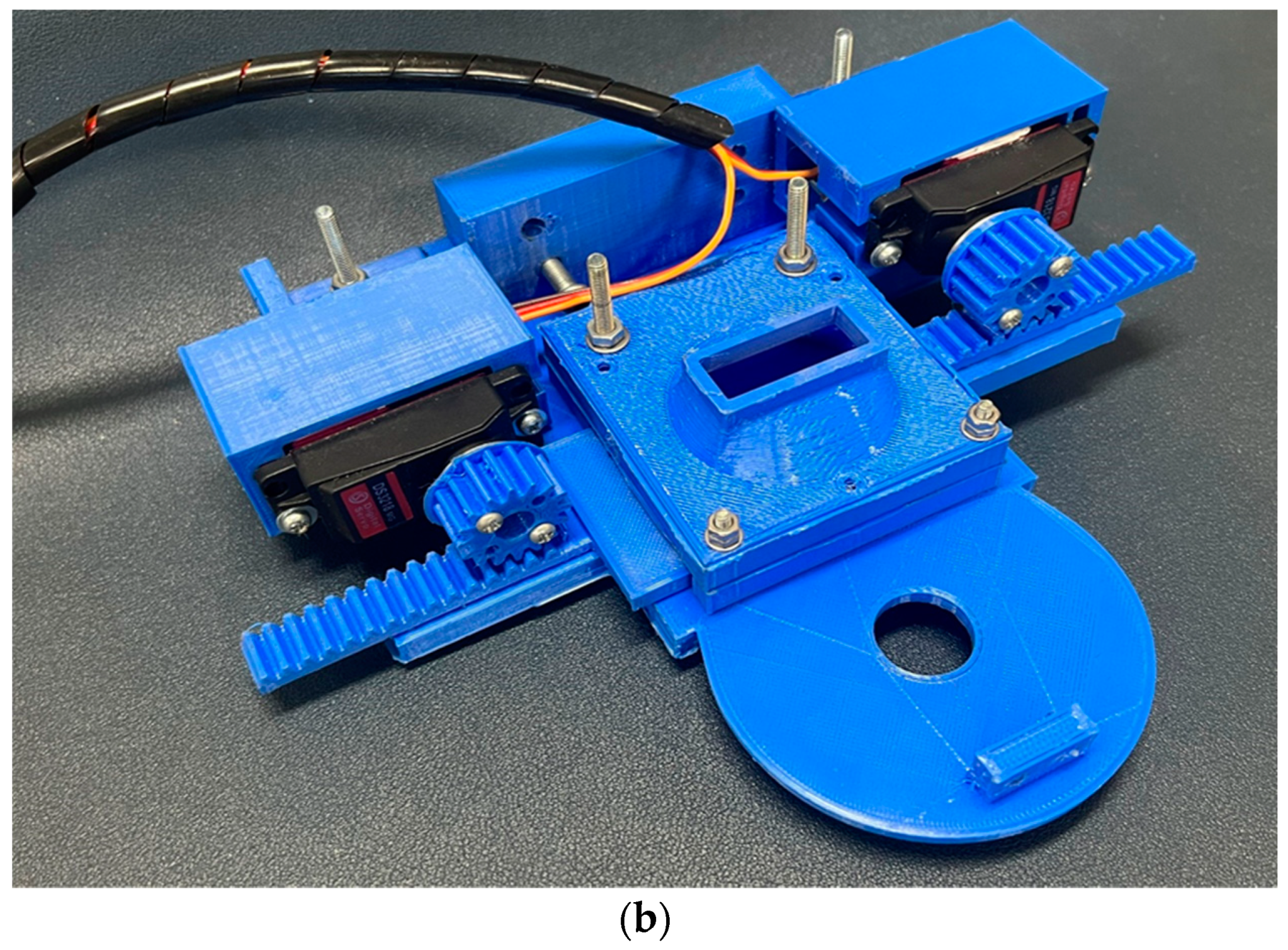
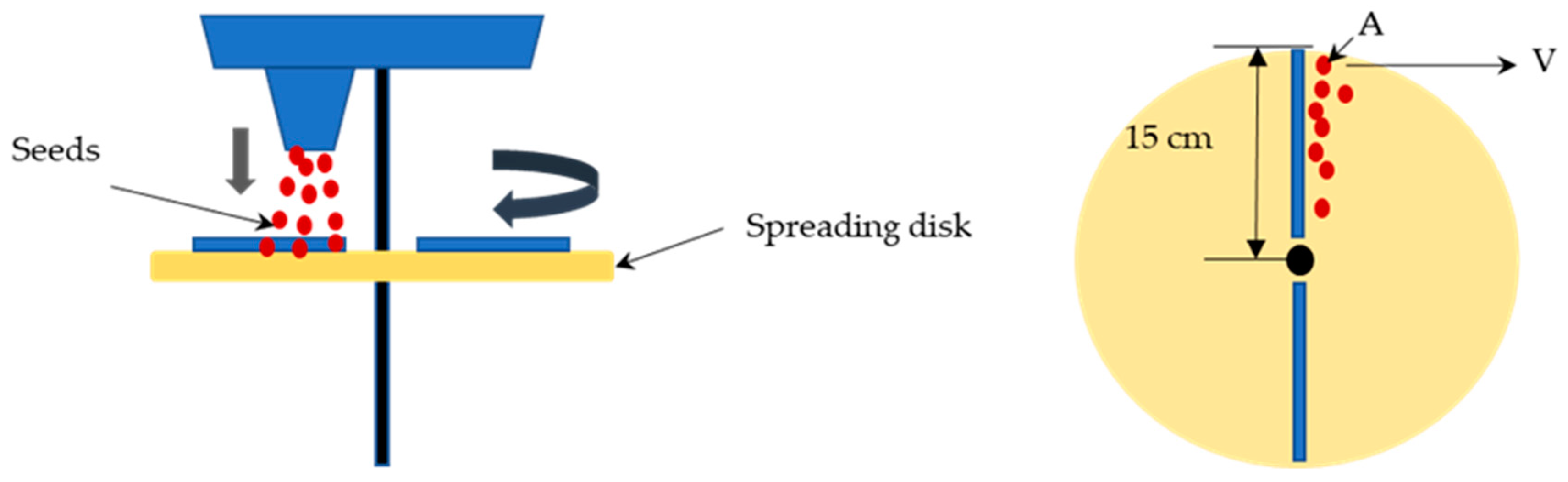
2.2. Seed Metering Mechanism
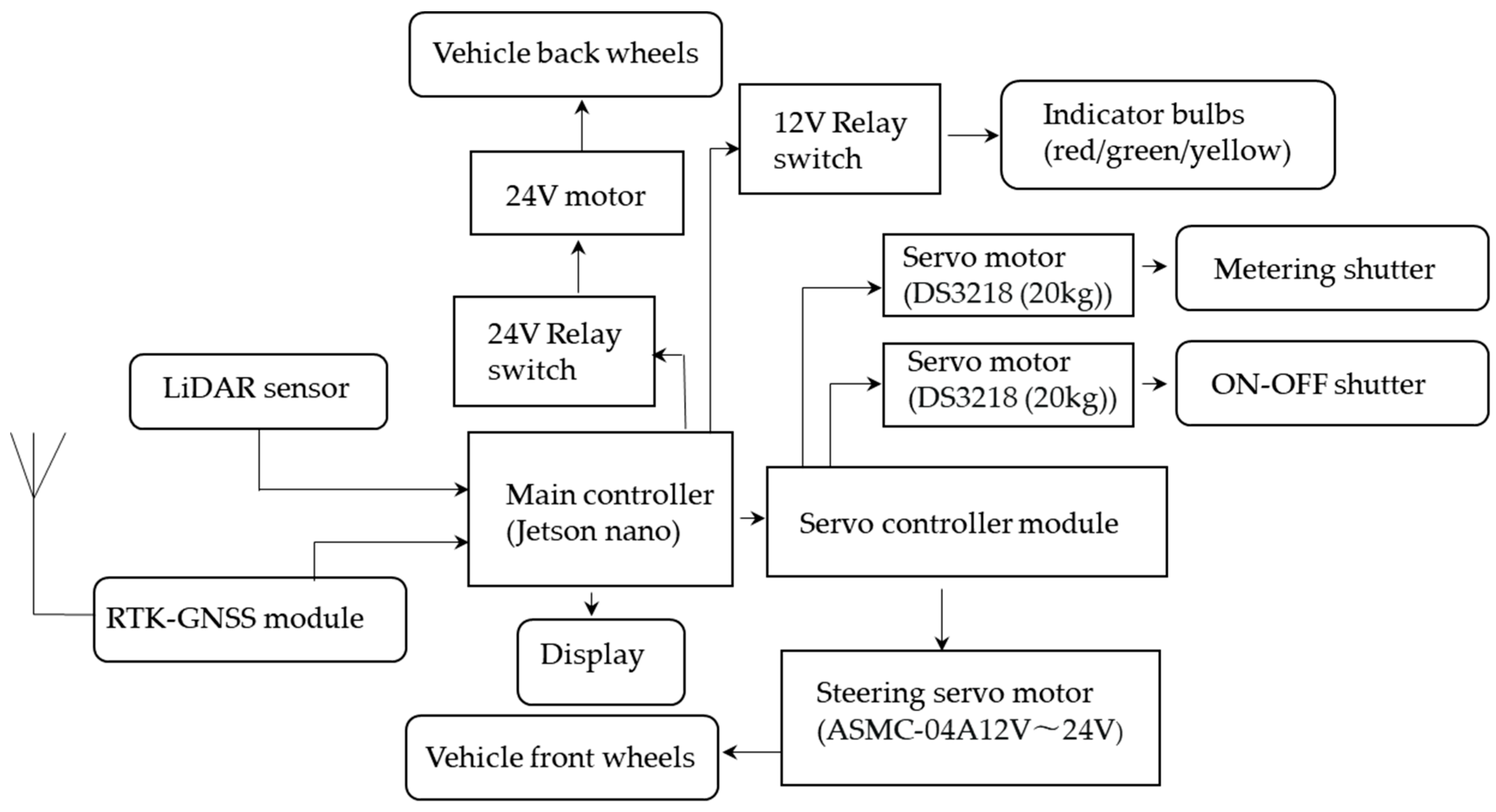
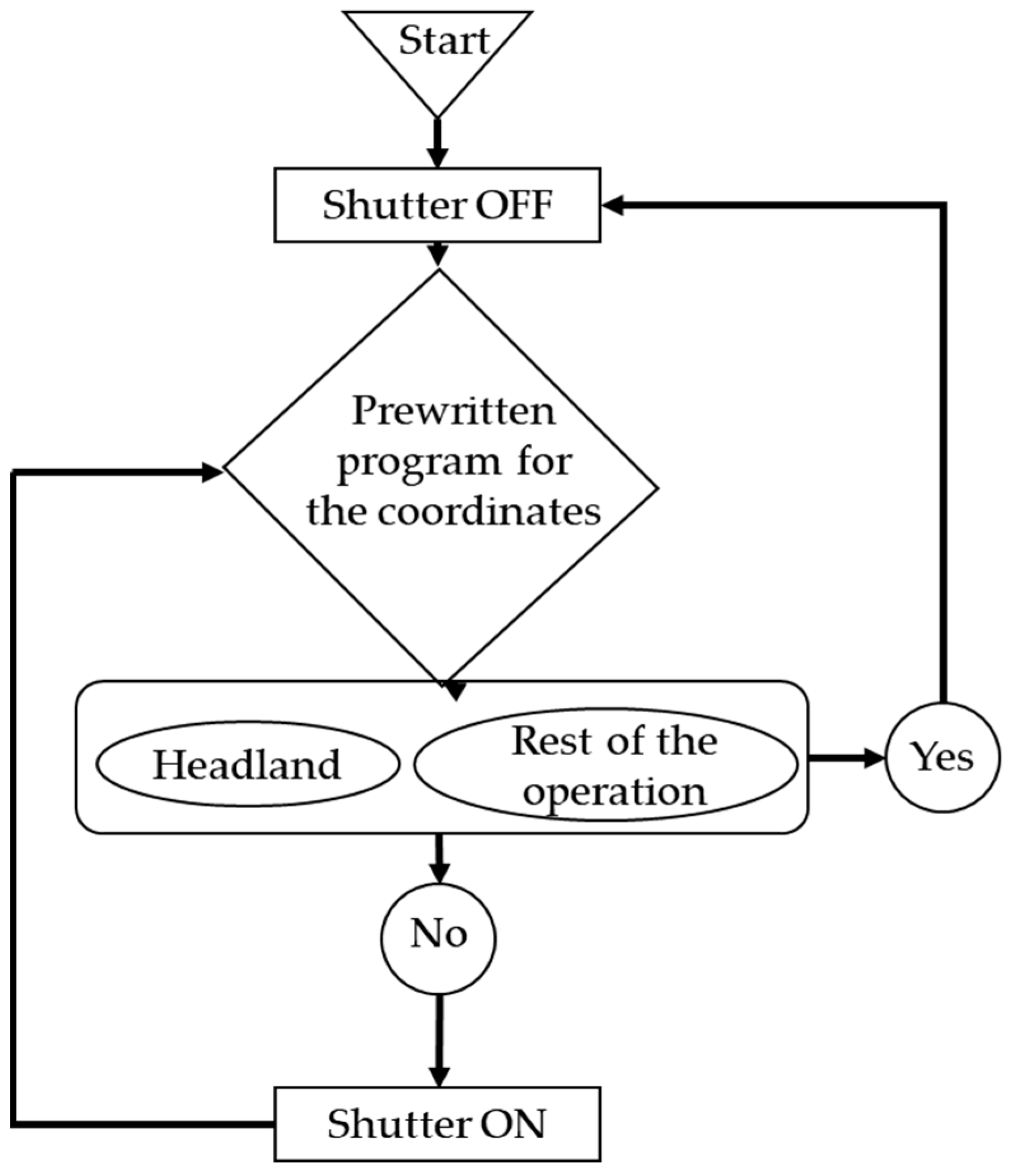
2.3. Broadcasting System for Autonomous Vehicles
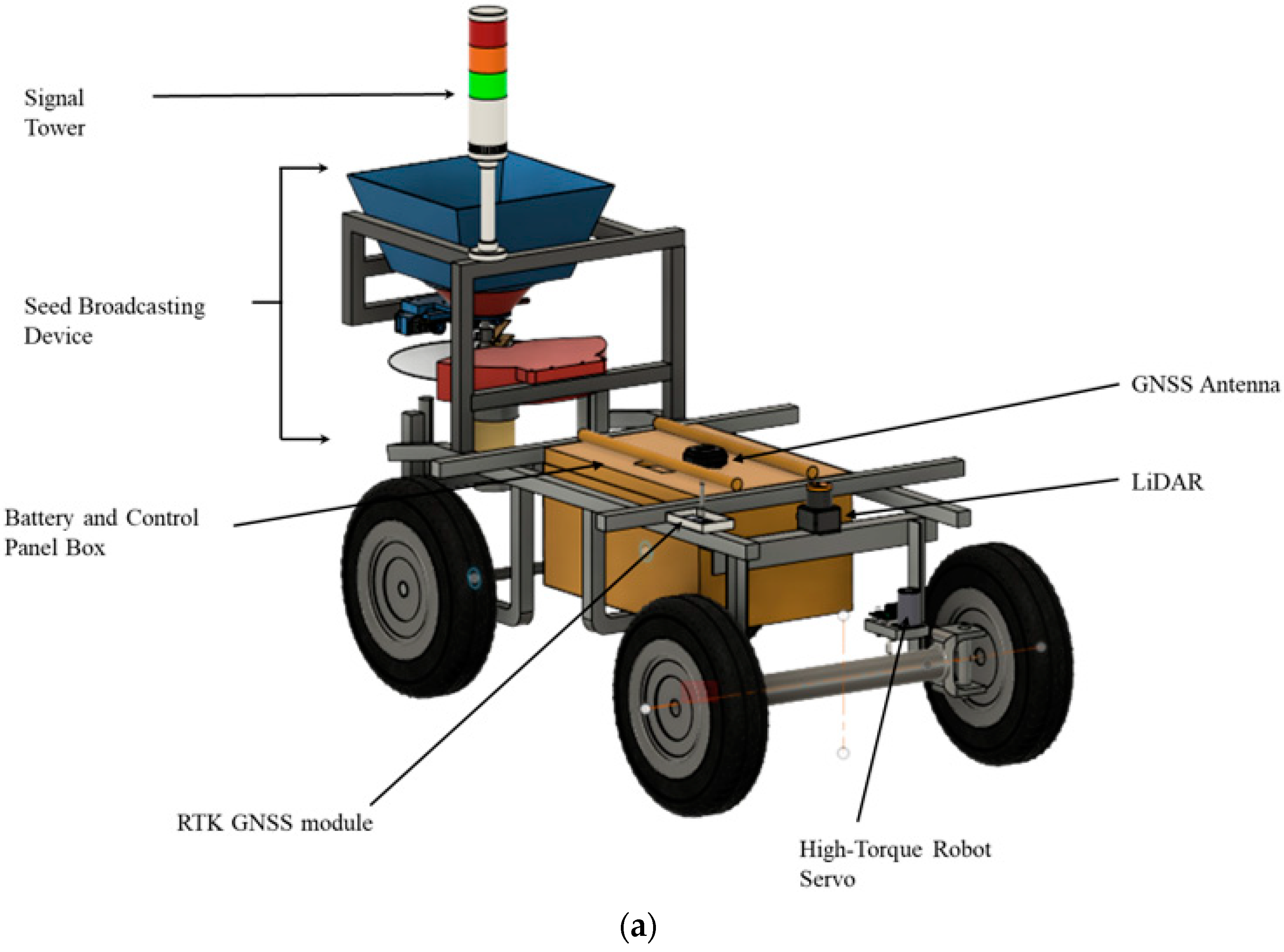
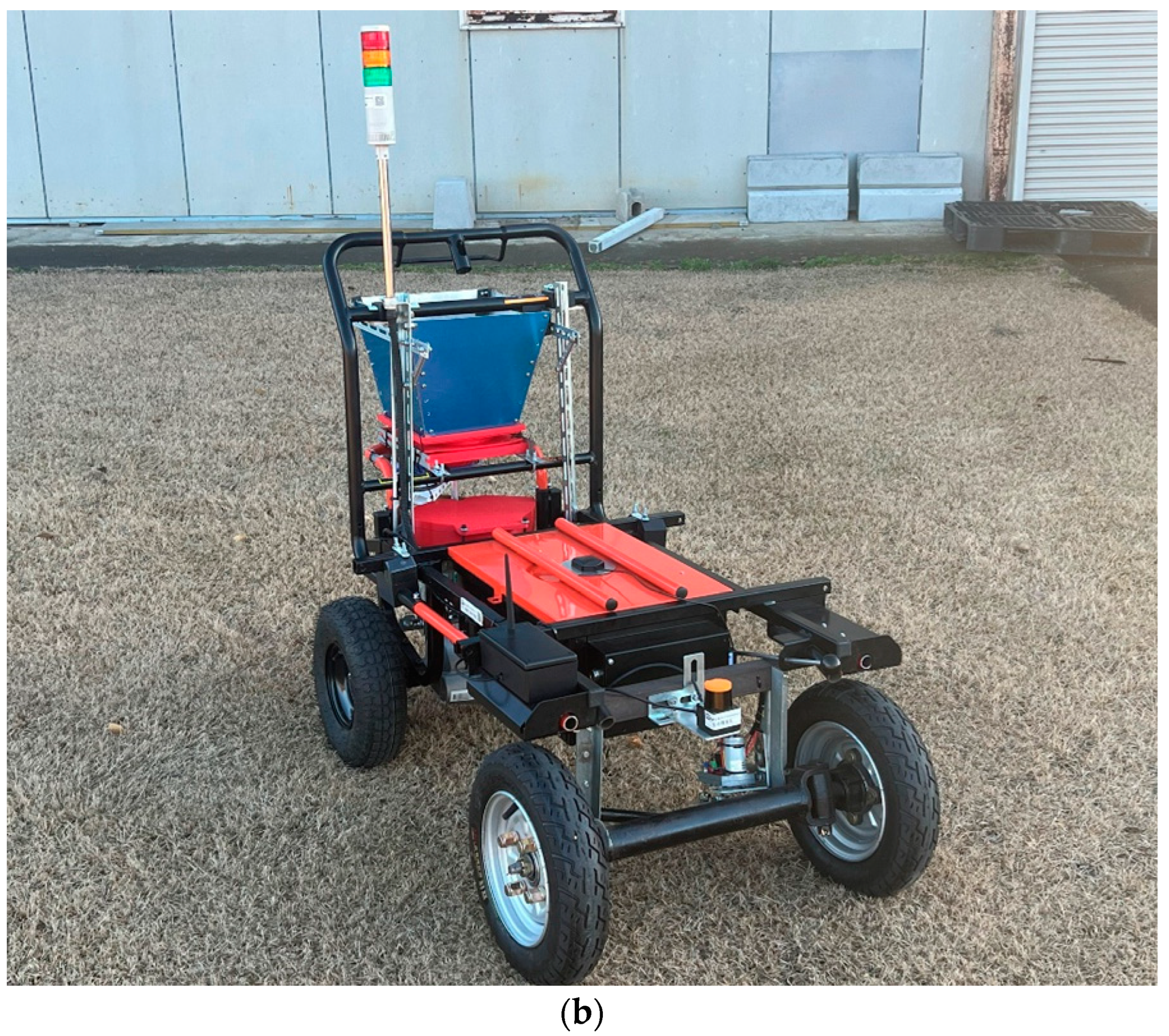
2.4. Small-Scale Vehicles for Autonomous Operation
2.4.1. Vehicle Modification
2.4.2. Vehicle Driving and Steering Systems
2.4.3. Structure of the Seeder
2.5. Seed Broadcaster Calibration and Data Collection
2.5.1. Seed Metering Unit Evaluation
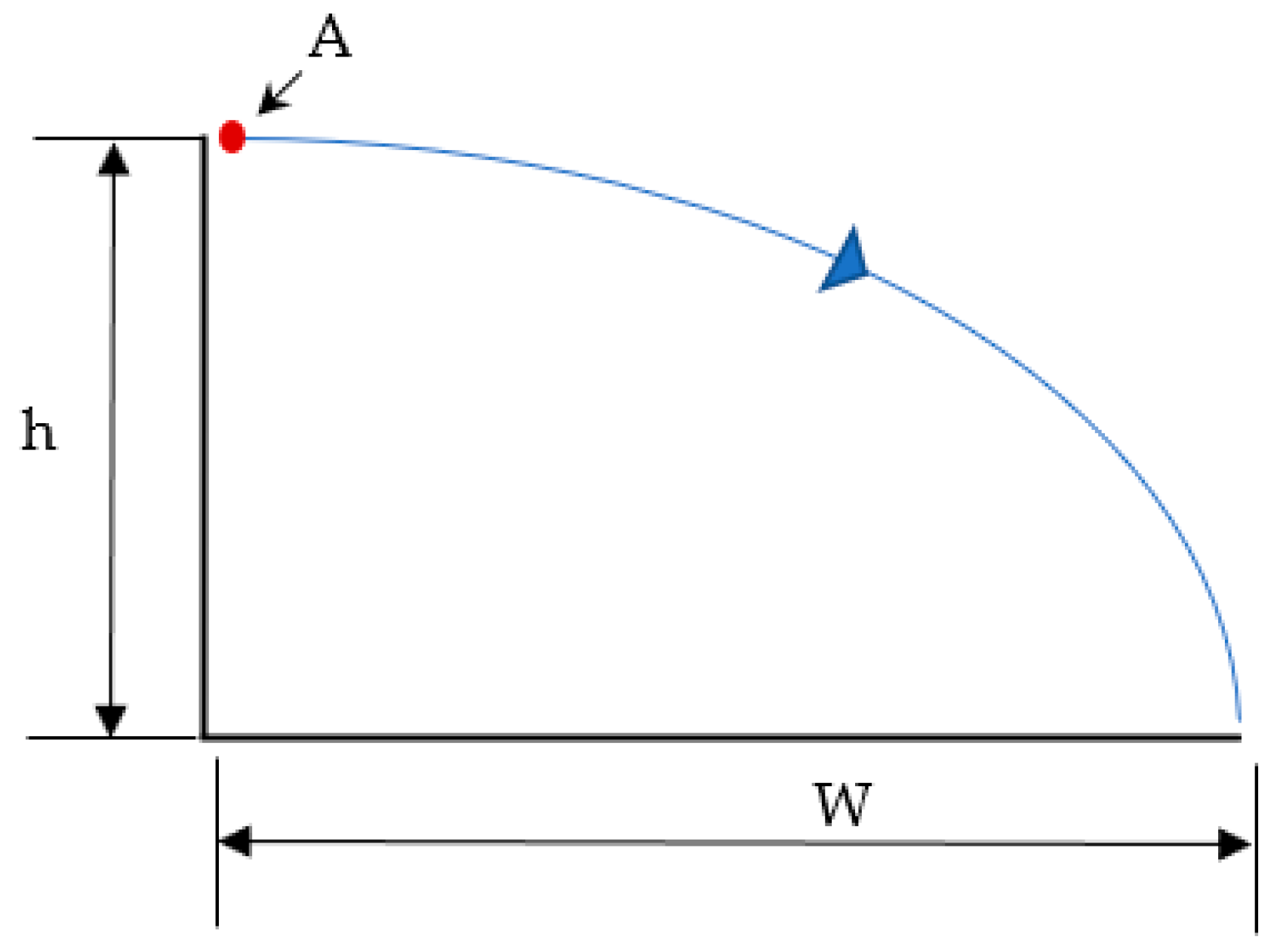
2.5.2. Kinematic Approach for Seed Distribution
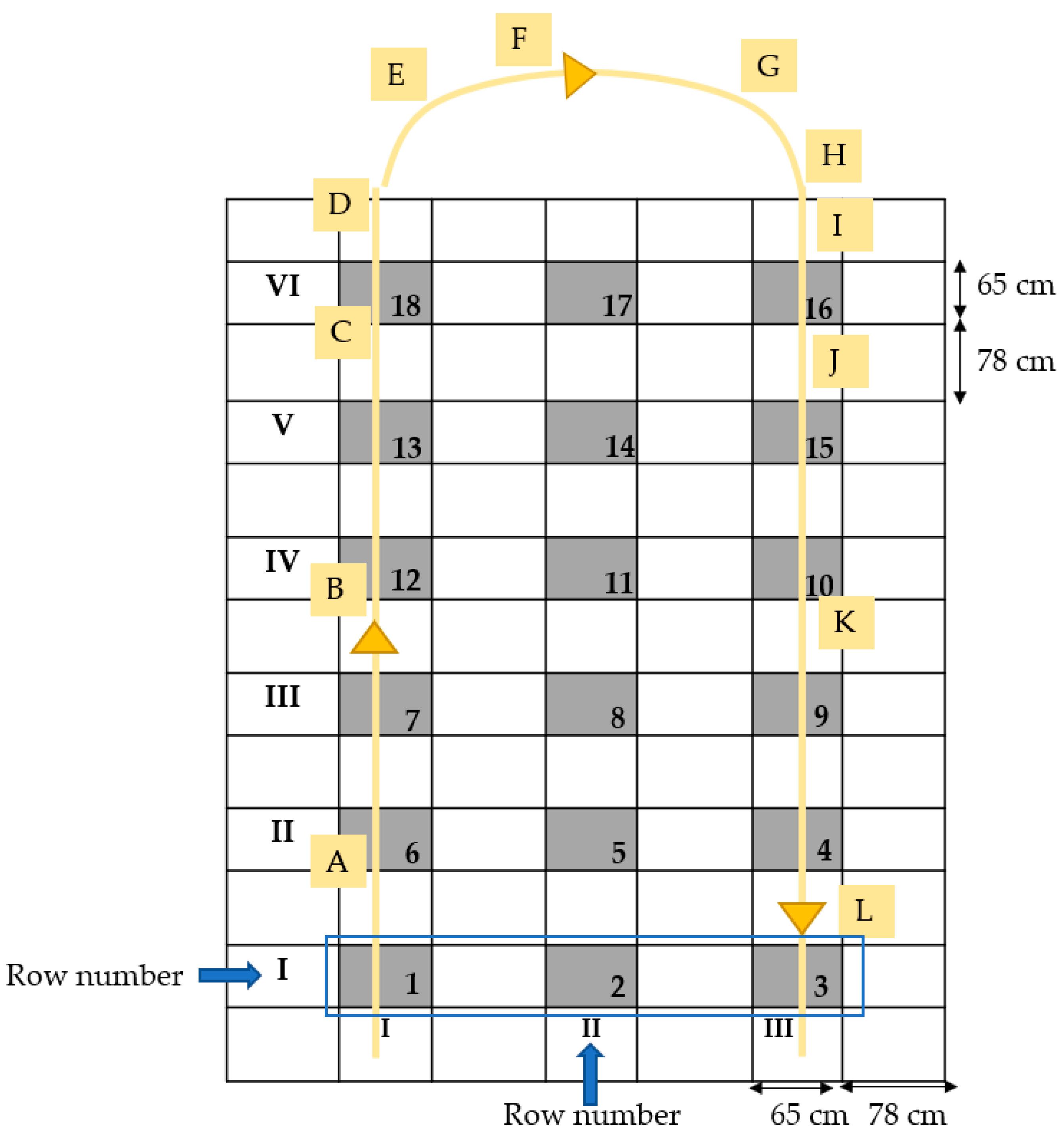
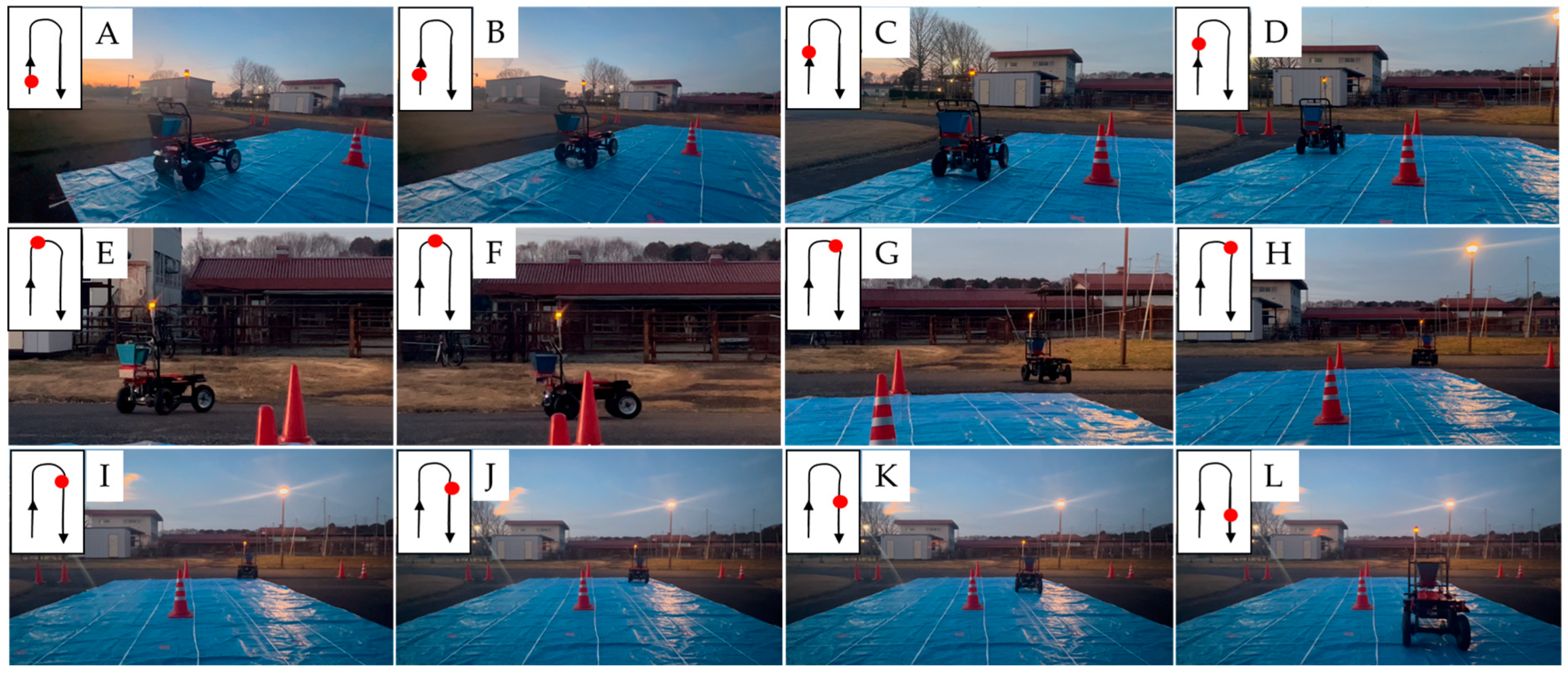
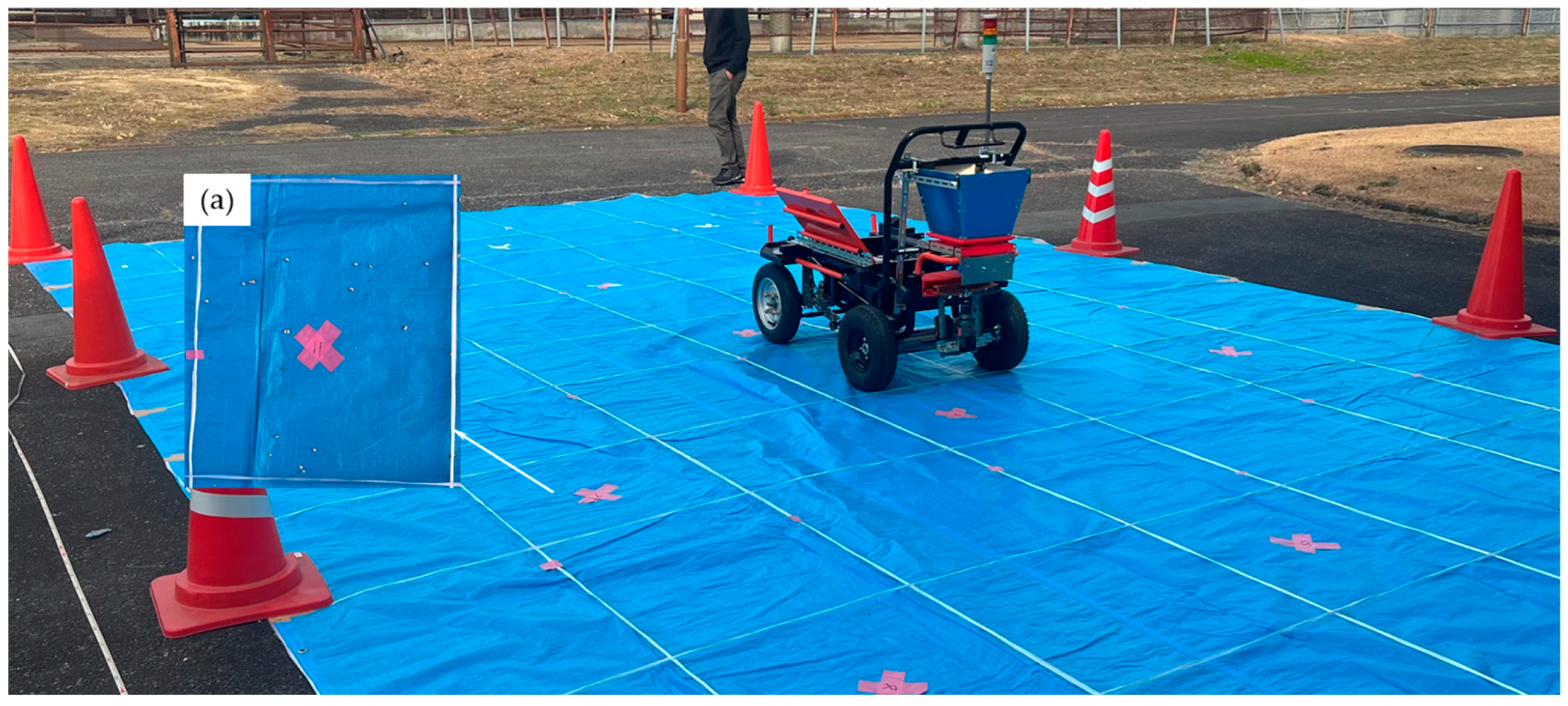
2.6. Field Experiments
- Uniformity of Distribution
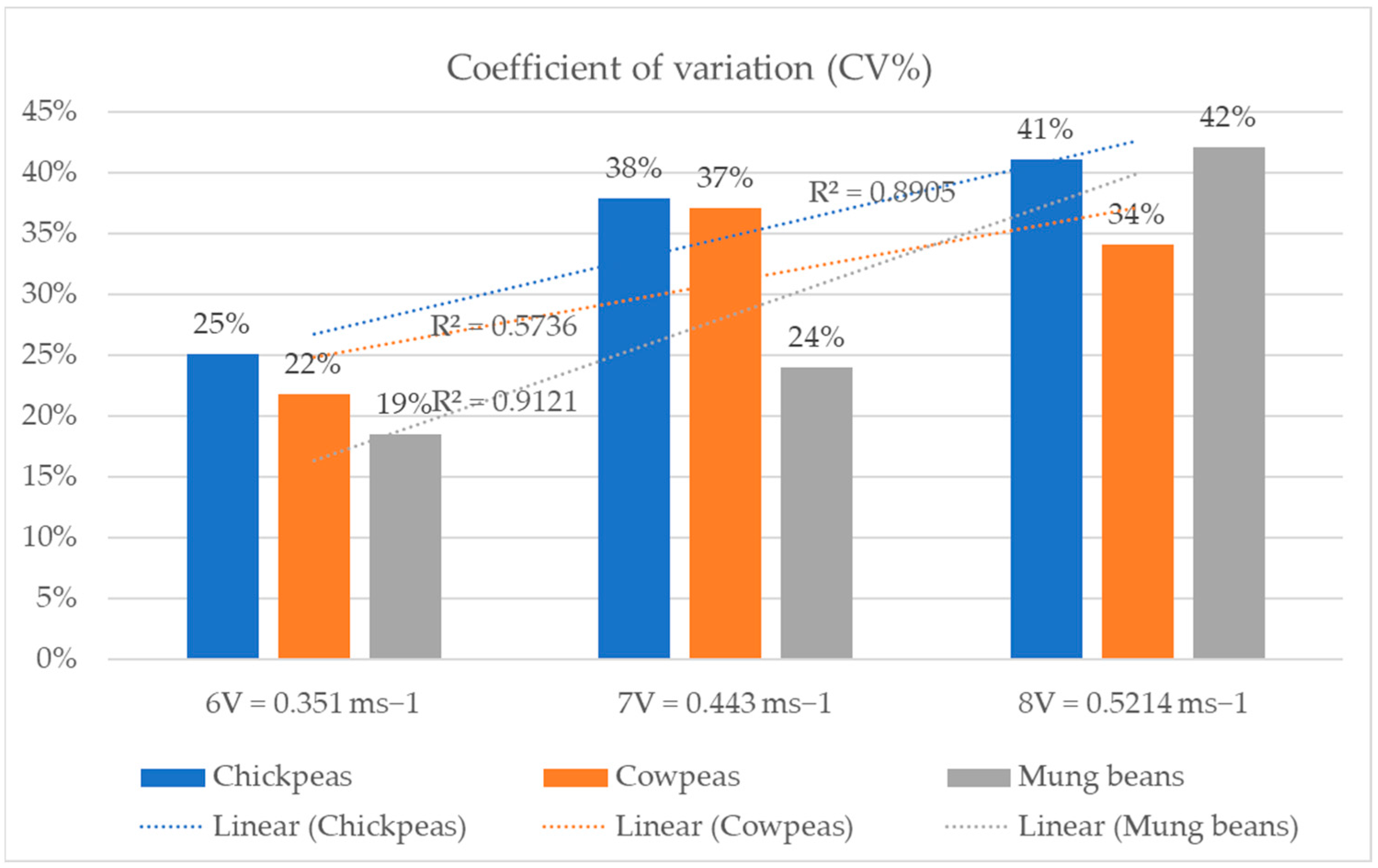
- Coefficient of Variation (CV)
3. Results
4. Discussion
5. Conclusions
- (1)
- A new 3D printed seed metering mechanism system for broadcasting seeds was developed for integration with small-scale autonomous vehicles.
- (2)
- An autonomous small vehicle was converted so that a seed metering system could be attached, and a low-cost RTK-GNSS positioning system was equipped to allow for tracking of the vehicle’s position during broadcasting.
- (3)
- The broadcasting system was tested to identify seed distribution, and results show that at the speed of 0.351 ms−1 the coefficient of variation for cowpea, mung bean, and chickpea was 22%, 19%, and 25%, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, H.-C.; Fukushima, Y. Rice Cultivation Methods and Their Sustainability Aspects: Organic and Conventional Rice Production in Industrialized Tropical Monsoon Asia with a Dual Cropping System. Sustainability 2016, 8, 529. [Google Scholar] [CrossRef]
- Hossen, M.A.; Talukder, M.R.A.; Al Mamun, M.R.; Rahaman, H.; Paul, S.; Rahman, M.M.; Miaruddin, M.; Ali, M.A.; Islam, M.N. Mechanization Status, Promotional Activities and Government Strategies of Thailand and Vietnam in Comparison to Bangladesh. AgriEngineering 2020, 2, 489–510. [Google Scholar] [CrossRef]
- Belton, B.; Win, M.T.; Zhang, X.; Filipski, M. The rapid rise of agricultural mechanization in Myanmar. Food Policy 2021, 101, 102095. [Google Scholar] [CrossRef]
- Pandey, S.; Mortimer, M.; Wade, L.; Tuong, T.P.; Lopez, K.; Hardy, B. (Eds.) Direct seeding: Research issues and opportunities. In Proceedings of the International Workshop on Direct Seeding in Asian Rice Systems: Strategic Research Issues and Opportunities, Bangkok, Thailand, 25–28 January 2000; International Rice Research Institute: Los Baños, PH, USA, 2002. 383p. [Google Scholar]
- Awulu, J.O.; Audu, J.; Nuhu, G. Development and Evaluation of Manually Operated Seed Broadcaster. J. Agric. Eng. Biotechnol. 2014, 2, 13. [Google Scholar] [CrossRef]
- Sudake, R.D.; Andhale, Y.C.; Kothavade, A.K.; Gunjal, P.B.; Niketan, V. Design and Development of SeedSowing Machine for Agriculture Purpose. Int. J. Res. Anal. Rev. (IJRAR) 2019, 10, 549–551. Available online: www.Ijrar.Org (accessed on 15 February 2023).
- Nukeshev, S.O.; Kakabaev, N.; Romanyuk, N.N.; Troyanovskaya, I.P.; Smelik, V.A.; Voinash, S.A. Design and rationale for parametres of the seed-fertilizer seeder coulter for subsoil broadcast seeding. IOP Conf. Ser. Earth Environ. Sci. 2021, 677, 052010. [Google Scholar] [CrossRef]
- Brennan, E.B.; Leap, J.E. A comparison of drill and broadcast methods for establishing cover crops on beds. HortScience 2014, 49, 441–447. [Google Scholar] [CrossRef]
- Fisher, K.A.; Momen, B.; Kratochvil, R.J. Is broadcasting seed an effective winter cover crop planting method? Agron. J. 2011, 103, 472–478. [Google Scholar] [CrossRef]
- RShamshiri, R.; Weltzien, C.; Hameed, I.A.; Yule, I.; Grift, T.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1. [Google Scholar]
- Ayerdi Gotor, A.; Marraccini, E.; Leclercq, C.; Scheurer, O. Precision Farming Uses Typology in Arable Crop-Oriented Farms in Northern France. Precis. Agric. 2020, 21, 131–146. [Google Scholar] [CrossRef]
- Landau, H.; Chen, X.; Klose, S.; Leandro, R.; Vollath, U. Trimble’s RTK and DGPS solutions in comparison with precise point positioning, observing our changing earth. In Proceedings of the International Association of Geodesy Symposia, Perugia, Italy, 2–13 July 2007; pp. 709–718. [Google Scholar]
- Wang, T.; Chen, B.; Zhang, Z.; Li, H.; Zhang, M. Applications of machine vision in agricultural robot navigation: A review. Comput. Electron. Agric. 2022, 198, 107085. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology Aerospace & Electronic Systems Magazine; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar]
- Ponnambalam, V.R.; Bakken, M.; Moore, R.J.D.; Gjevestad, J.G.O.; From, P.J. Autonomous Crop Row Guidance Using Adaptive Multi-ROI in Strawberry Fields. Sensors 2020, 20, 5249. [Google Scholar] [CrossRef] [PubMed]
- Kazberov, R.Y.; Tuzhilin, S.P. The Quality of Strengthening Impregnation of 3D-Printed Parts for Agricultural Machinery. Agric. Mach. Technol. 2022, 16, 48–54. (In Russian) [Google Scholar] [CrossRef]
- Verim, Ö.; Sen, O. Application of Reverse Engineering Method on Agricultural Machinery Parts. Int. Adv. Res. Eng. J. 2023, 7, 35–40. [Google Scholar] [CrossRef]
- Jurišić, M.; Plaščak, I.; Željko, B.; Radocaj, D.; Zimmer, D. Sensors and Their Application in Precision Agriculture. Teh. Glas. 2017, 15, 529–533. [Google Scholar] [CrossRef]
- Ziauddin, A.T.M.; Hussain Khan, F. BAUZIA Seed-Fertilizer Distributor—A Novel Technology Ready for Commercial Use. In Proceedings of the 4th International Conference on Mechanical Engineering, Dhaka, Bangladesh, 26–28 December 2001; pp. 117–122. Available online: https://me.buet.ac.bd/icme/icme2001/cdfiles/Papers/Applied%20Mechanics/serial21.pdf (accessed on 5 May 2023).
- Abeyrathna, R.M.; Nakaguchi, V.M.; Minn, A.; Ahamed, T. Recognition and Counting of Apples in a Dynamic State Using a 3D Camera and Deep Learning Algorithms for Robotic Harvesting Systems. Sensors 2023, 23, 3810. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particular | Item | Specifications | |
|---|---|---|---|
| Dimensions of the seed broadcaster | Overall length (cm) | 35 | |
| Overall width (cm) | 35 | ||
| Overall height (cm) | 70 | ||
| Spreading mechanism | Diameter of the disk (cm) | 30 | |
| Number of blades | 2 | ||
| Shape of blade | C-shaped | ||
| Spreading angle | 134° | ||
| Hopper | Primary hopper | Volume (cm3) | 22,500 |
| Shape | Trapezoidal | ||
| Secondary hopper | Volume (cm3) | 630 | |
| Shape | Circular/oval loft | ||
| Total volume (cm3) | 23,130 | ||
| Seed Variety | Scientific Name | Average Length (mm) | Average Width/Height (mm) |
|---|---|---|---|
| Cowpeas | Vigna unguiculata | 10 | 6 |
| Mung beans | Vigna radiata | 6 | 4.5 |
| Chickpeas | Cicer arietinum | 10 | 8.5 |
| Mung Beans | Cowpeas | Chickpeas | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Seed/Grid | CV% | Seed/Grid | CV% | Seed/Grid | CV% | |||||||
| Row/Column | I | II | III | I | II | III | I | II | III | |||
| I | 23 | 22 | 22 | 2 | 13 | 11 | 8 | 19 | 4 | 6 | 4 | 20 |
| II | 24 | 25 | 15 | 21 | 9 | 12 | 7 | 22 | 4 | 5 | 7 | 23 |
| III | 18 | 26 | 30 | 20 | 8 | 11 | 7 | 20 | 4 | 9 | 6 | 32 |
| IV | 17 | 25 | 15 | 23 | 6 | 10 | 6 | 26 | 5 | 8 | 6 | 20 |
| V | 17 | 27 | 19 | 21 | 7 | 11 | 6 | 27 | 5 | 9 | 5 | 30 |
| VI | 15 | 22 | 28 | 25 | 8 | 12 | 9 | 18 | 6 | 9 | 5 | 25 |
| Mean CV% | 19% | 22% | 25% | |||||||||
| Mung Beans | Cowpeas | Chickpeas | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Row | Seed/Grid | CV% | Seed/Grid | CV% | Seed/Grid | CV% | ||||||
| Row/Column | I | II | III | I | II | III | I | II | III | |||
| I | 14 | 18 | 15 | 11 | 10 | 12 | 5 | 33 | 2 | 2 | 3 | 20 |
| II | 10 | 20 | 9 | 38 | 5 | 5 | 8 | 24 | 3 | 7 | 2 | 54 |
| III | 13 | 10 | 9 | 16 | 6 | 12 | 5 | 40 | 5 | 3 | 7 | 33 |
| IV | 26 | 20 | 10 | 35 | 4 | 4 | 7 | 28 | 2 | 2 | 3 | 20 |
| V | 22 | 22 | 15 | 17 | 2 | 4 | 8 | 53 | 3 | 6 | 2 | 46 |
| VI | 18 | 18 | 10 | 25 | 6 | 13 | 5 | 44 | 3 | 1 | 5 | 54 |
| Mean CV% | 24% | 37% | 38% | |||||||||
| Mung Beans | Cowpeas | Chickpeas | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Row | Seed/Grid | CV% | Seed/Grid | CV% | Seed/Grid | CV% | ||||||
| Row/Column | I | II | III | I | II | III | I | II | III | |||
| I | 11 | 15 | 6 | 35 | 7 | 9 | 4 | 31 | 2 | 6 | 4 | 41 |
| II | 15 | 12 | 7 | 29 | 3 | 6 | 3 | 35 | 3 | 3 | 6 | 35 |
| III | 7 | 19 | 5 | 60 | 5 | 9 | 3 | 44 | 1 | 2 | 1 | 35 |
| IV | 8 | 17 | 6 | 46 | 3 | 7 | 4 | 36 | 1 | 3 | 2 | 41 |
| V | 18 | 18 | 8 | 32 | 6 | 8 | 4 | 27 | 2 | 4 | 1 | 53 |
| VI | 8 | 17 | 5 | 51 | 5 | 10 | 6 | 31 | 1 | 2 | 3 | 41 |
| Mean CV% | 42% | 34% | 41% | |||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Minn, A.; Abeyrathna, R.M.R.D.; Nakaguchi, V.M.; Ahamed, T. Development of a 3D Printed New Metering Mechanism for a Multi-Crop Seed Broadcasting System Using an Autonomous Small-Scale Vehicle. Inventions 2023, 8, 69. https://doi.org/10.3390/inventions8030069
Minn A, Abeyrathna RMRD, Nakaguchi VM, Ahamed T. Development of a 3D Printed New Metering Mechanism for a Multi-Crop Seed Broadcasting System Using an Autonomous Small-Scale Vehicle. Inventions. 2023; 8(3):69. https://doi.org/10.3390/inventions8030069
Chicago/Turabian StyleMinn, Arkar, R. M. Rasika D. Abeyrathna, Victor Massaki Nakaguchi, and Tofael Ahamed. 2023. "Development of a 3D Printed New Metering Mechanism for a Multi-Crop Seed Broadcasting System Using an Autonomous Small-Scale Vehicle" Inventions 8, no. 3: 69. https://doi.org/10.3390/inventions8030069
APA StyleMinn, A., Abeyrathna, R. M. R. D., Nakaguchi, V. M., & Ahamed, T. (2023). Development of a 3D Printed New Metering Mechanism for a Multi-Crop Seed Broadcasting System Using an Autonomous Small-Scale Vehicle. Inventions, 8(3), 69. https://doi.org/10.3390/inventions8030069