
_Wang.png)

Performance Assessment in a “Lane Departure” Scenario of Impending Collision for an ADAS Logic Based on Injury Risk Minimisation



Abstract
:1. Introduction
2. Materials and Methods
2.1. Model-in-the-Loop
- 1.
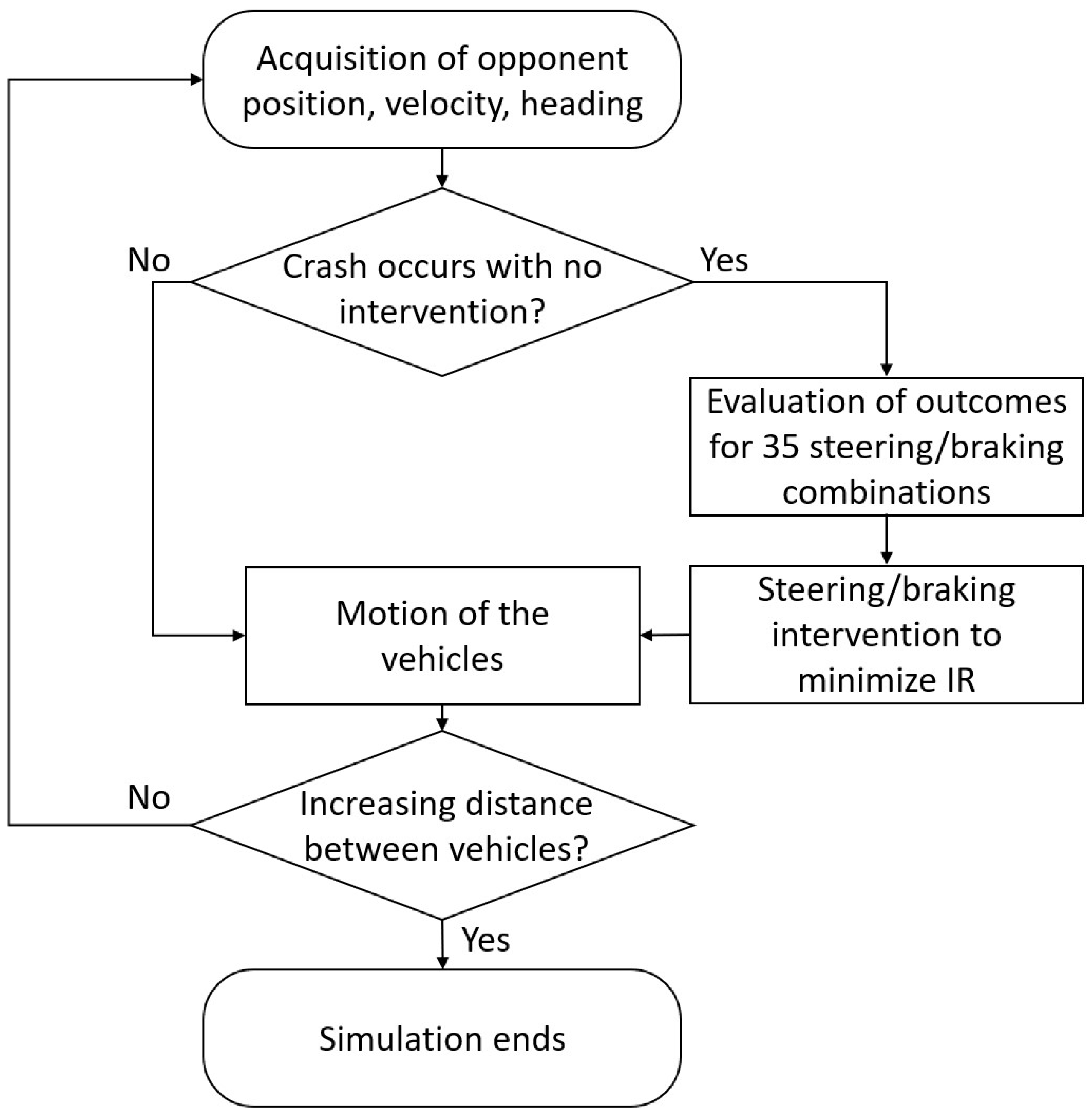
- Through sensors and data fusion [16,17], the system onboard the ego vehicle acquires the position, translation speed, heading, and angular velocity of the opponent, employing these elements to perform a prediction of intention [18] on the opponent’s actions; the time step at which the system acquires supplementary information from the sensors is set equal to 0.1 s in the present study.
- 2.
- Starting from the sensor information and the predicted intention of the opponent, the adaptive system evaluates whether the collision is avoidable without intervening by braking or steering, adopting a Reduced Order Dynamic Model (RODM) discussed in previous articles [19,20] for the accurate 2D simulation of free kinematics and collision phases. Considering the low TTC in the analysed scenarios that is below the usual human time for reaction, the ADAS system has no possibility to alert the driver for intervention; the responsibility for intervention hence falls on the ADAS alone. If the collision is avoidable, the system does not intervene and bypasses the point 3 reported below.
- 3.
- If the collision occurs should no intervention by the ADAS be performed, the system evaluates the outcomes associated with 35 combinations of wheel steering and braking through RODM simulations; the levels of wheel steering vary between 0° and 9° in steps of 3° (grip limit for 50 km/h) to the right and left (negative and positive steering, respectively), while the braking value varies between 0% and 100% (corresponding to decelerations of 8 m/s2). Each combination is associated with an IR value, equal to IR itself if the intervention results in a collision and to the clearance between vehicles (minimum distance reached during kinematics) if the collision does not occur. The clearance is associated with negative IR values.
- 4.
- The adaptive system is capable of identifying the best intervention on steering and braking by searching for the minimum IR value among all the identified outcomes, which can be graphically summarised in an IR map such as the one shown in Figure 1. In this way, the adaptive logic is able to handle both avoidable and unavoidable collision states; for the present study, the decision logic considers the IR for the occupants of the ego vehicle only.
- 5.
- Steering and braking are adopted, and the vehicles move to the next time step for scanning the external environment by the ego vehicle’s sensors. For ease of discussion, it is assumed that the braking and steering system circuits activate instantaneously (actual values for a braking system are close to 0.2 s).
- 6.
- The ADAS assesses whether, compared to the previous step of scanning the environment, the vehicles’ centres of gravity are distancing; in the latter case, the vehicles have exited the criticality, and it is no longer necessary to simulate further time steps. Otherwise, the steps are repeated using the vehicles’ new positions, translation, and rotational velocities.
2.2. IR Model
2.3. Case Study Scenario
3. Results
- 1.
- The additional activation on steering by the adaptive logic leads to a relevant decrease in IR, both compared to the "no intervention” logic (−80%) and to the AEB function (−30%); these values are significantly higher than those associated with intersection collisions [14].
- 2.
- The adaptive logic does not increase the frequency of impacts compared to the AEB function, also leading to its decrease if a limited distance between vehicles is addressed along the transversal to the road axis.
- 3.
- The interventions to be prioritised to reduce IR are those on the steering, so that the vehicle can be guided towards eccentric impacts; the intervention on the braking can bring advantages when the TTC is low, i.e., when the vehicles are already moving towards eccentric impacts and decreasing the closing speed results in a reduction of .
- 4.
- Although the activation of the braking and steering for the adaptive logic is aimed at minimising the IR for the occupants of the ego vehicle, a reduction of for the occupants of both vehicles is confirmed, compared to both the case of “no intervention” and AEB function.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Merah, A.; Hartani, K.; Draou, A. A New Shared Control for Lane Keeping and Road Departure Prevention. Veh. Syst. Dyn. 2016, 54, 86–101. [Google Scholar] [CrossRef]
- Stubler, T.; Niegl, M.; Förster, M.; Pfeffer, P.E.; Abhishek, R. Development and model-based calibration of the lateral controllers “steer-by-angle” and “steer-by-torque” of a lane keeping assistance system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2136–2147. [Google Scholar] [CrossRef]
- Yu, L.; Wang, R. Researches on Adaptive Cruise Control system: A state of the art review. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 211–240. [Google Scholar] [CrossRef]
- Pan, C.; Huang, A.; Chen, L.; Cai, Y.; Chen, L.; Liang, J.; Zhou, W. A review of the development trend of adaptive cruise control for ecological driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 1931–1948. [Google Scholar] [CrossRef]
- Wu, X.; Yan, L.; Li, H.; Su, C. Forward collision warning system using multi-modal trajectory prediction of the intelligent vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Sander, U.; Lubbe, N. Market Penetration of Intersection AEB: Characterizing Avoided and Residual Straight Crossing Path Accidents. Accid. Anal. Prev. 2018, 115, 178–188. [Google Scholar] [CrossRef]
- Kaempchen, N.; Schiele, B.; Dietmayer, K. Situation Assessment of an Autonomous Emergency Brake for Arbitrary Vehicle-to-Vehicle Collision Scenarios. IEEE Trans. Intell. Transp. Syst. 2009, 10, 678–687. [Google Scholar] [CrossRef]
- Jurewicz, C.; Sobhani, A.; Woolley, J.; Dutschke, J.; Corben, B. Exploration of Vehicle Impact Speed–Injury Severity Relationships for Application in Safer Road Design. Transp. Res. Procedia 2016, 14, 4247–4256. [Google Scholar] [CrossRef]
- Vangi, D.; Gulino, M.S.; Fiorentino, A.; Virga, A. Crash momentum index and closing velocity as crash severity index. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 3318–3326. [Google Scholar] [CrossRef]
- Gulino, M.S.; Gangi, L.D.; Sortino, A.; Vangi, D. Injury Risk Assessment Based on Pre-Crash Variables: The Role of Closing Velocity and Impact Eccentricity. Accid. Anal. Prev. 2021, 150, 105864. [Google Scholar] [CrossRef]
- Vangi, D. Vehicle Collision Dynamics: Analysis and Reconstruction; Butterworth-Heinemann: Oxford, UK, 2020. [Google Scholar]
- Sieber, M.; Siedersberger, K.H.; Siegel, A.; Farber, B. Automatic Emergency Steering with Distracted Drivers: Effects of Intervention Design. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; IEEE: Gran Canaria, Spain, 2015; pp. 2040–2045. [Google Scholar] [CrossRef]
- Li, D.; Zhang, J.; Xiao, B.; Tang, B.; Hu, Z. Vehicle crash mitigation strategy in unavoidable collision scenarios: Focusing on motion planning by considering a generalized crash severity model. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 581. [Google Scholar] [CrossRef]
- Vangi, D.; Virga, A.; Gulino, M.S. Adaptive Intervention Logic for Automated Driving Systems Based on Injury Risk Minimization. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2975–2987. [Google Scholar] [CrossRef]
- Song, S.; Chen, W.; Liu, Q.; Hu, H.; Huang, T.; Zhu, Q. A novel deep learning network for accurate lane detection in low-light environments. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 424–438. [Google Scholar] [CrossRef]
- Wang, B.C.; Liu, C.Z.; Zhang, L.T.; Wang, D.S. An Innovative multi-sensor data fusion method based on thrice deeply-fusion architecture for multi-object tracking. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Li, Y.; Li, C.; Zhang, W. Lane-GAN: A Robust Lane Detection Network for Driver Assistance System in High Speed and Complex Road Conditions. Micromachines 2022, 13, 716. [Google Scholar] [CrossRef]
- Benterki, A.; Boukhnifer, M.; Judalet, V.; Choubeila, M. Prediction of Surrounding Vehicles Lane Change Intention Using Machine Learning. In Proceedings of the 2019 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019; IEEE: Metz, France, 2019; pp. 839–843. [Google Scholar] [CrossRef]
- Vangi, D.; Begani, F.; Gulino, M.S.; Spitzhüttl, F. A vehicle model for crash stage simulation. IFAC-PapersOnLine 2018, 51, 837–842. [Google Scholar] [CrossRef]
- Vangi, D.; Begani, F.; Spitzhüttl, F.; Gulino, M.S. Vehicle Accident Reconstruction by a Reduced Order Impact Model. Forensic Sci. Int. 2019, 298, 426.e1–426.e11. [Google Scholar] [CrossRef] [PubMed]
- Gao, L.; Xiong, L.; Xia, X.; Lu, Y.; Yu, Z.; Khajepour, A. Improved vehicle localization using on-board sensors and vehicle lateral velocity. IEEE Sens. J. 2022, 22, 6818–6831. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control. Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Huang, Y.; Lu, Y.; Gao, L.; Xu, N.; Yu, Z. Estimation on IMU yaw misalignment by fusing information of automotive onboard sensors. Mech. Syst. Signal Process. 2022, 162, 107993. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-based automated vehicle body sideslip angle and attitude estimation aided by GNSS using parallel adaptive Kalman filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated vehicle sideslip angle estimation considering signal measurement characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Scanlon, J.M.; Kusano, K.D.; Gabler, H.C. Analysis of Driver Evasive Maneuvering Prior to Intersection Crashes Using Event Data Recorders. Traffic Inj. Prev. 2015, 16, S182–S189. [Google Scholar] [CrossRef] [PubMed]
- Gulino, M.S.; Fiorentino, A.; Vangi, D. Prospective and Retrospective Performance Assessment of Advanced Driver Assistance Systems in Imminent Collision Scenarios: The CMI-Vr Approach. Eur. Transp. Res. Rev. 2022, 14, 3. [Google Scholar] [CrossRef]
- Vangi, D.; Virga, A.; Conigliaro, M.; Steffan, H.; Tomasch, E. Adas-assisted driver behaviour in near missing car-pedestrian accidents. In Autonomous Vehicle; IntechOpen: London, UK, 2016; pp. 1–30. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3.5 | NO INTERVENTION | AEB | ADAPTIVE | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ya | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp |
| 26 | 0.2 | 0.2 | Near Side | Side | - | - | - | - | - | - | - | - |
| 27 | 0.3 | 0.4 | Near Side | Side | - | - | - | - | - | - | - | - |
| 28 | 0.6 | 0.7 | Near Side | Side | 0.2 | 0.1 | Near Side | Side | 0.1 | 0.1 | Side | Side |
| 29 | 0.9 | 0.9 | Side | Front | 0.7 | 0.3 | Near Side | Front | 0.2 | 0.1 | Side | Front |
| 30 | 3.2 | 2.5 | Side | Front | 1.2 | 0.4 | Near Side | Front | 0.8 | 0.3 | Near Side | Front |
| 31 | 21.7 | 13.6 | Side | Front | 3 | 1.5 | Side | Front | 0.9 | 0.3 | Near Side | Front |
| 32 | 63.6 | 46.3 | Side | Front | 16.7 | 6.7 | Side | Front | 2.4 | 0.8 | Near Side | Front |
| 33 | 56.9 | 63.1 | Front | Front | 26.1 | 24.7 | Front | Front | 1.8 | 0.6 | Near Side | Front |
| 34 | 31.6 | 32.9 | Front | Front | 23.6 | 32.1 | Front | Front | 1.1 | 0.4 | Near Side | Front |
| 35 | 77 | 77.9 | Front | Front | 31.6 | 34.2 | Front | Front | 1.8 | 0.6 | Near Side | Front |
| 36 | 82.4 | 83 | Front | Front | 34.5 | 31.5 | Front | Front | 2.2 | 0.7 | Near Side | Front |
| 37 | 82.5 | 81.9 | Front | Front | 33.8 | 29.9 | Front | Front | 2.1 | 0.7 | Near Side | Front |
| 38 | 52.3 | 49.4 | Front | Front | 17.3 | 13.6 | Front | Front | 1.1 | 0.7 | Near Side | Front |
| 39 | 76.9 | 75.9 | Front | Front | 5.6 | 3.1 | Front | Front | 1.6 | 0.9 | Near Side | Front |
| 40 | 21.2 | 19.5 | Front | Front | 0.9 | 0.4 | Front | Side | 2.4 | 1.4 | Near Side | Front |
| 41 | 23.8 | 41.8 | Front | Side | 0.2 | 0.2 | Front | Near Side | - | - | - | - |
| 42 | 14.8 | 18.7 | Front | Side | - | - | - | - | - | - | - | - |
| 43 | 3.7 | 2.5 | Front | Side | - | - | - | - | - | - | - | - |
| 44 | 1.4 | 2.4 | Front | Near Side | - | - | - | - | - | - | - | - |
| 45 | 0.6 | 1.1 | Front | Near Side | - | - | - | - | - | - | - | - |
| 46 | 0.3 | 0.4 | Front | Near Side | - | - | - | - | - | - | - | - |
| 47 | 0.1 | 0.1 | Front | Side | - | - | - | - | - | - | - | - |
| Xa = 4 m | NO INTERVENTION | AEB | ADAPTIVE | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ya | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp | IR Ego [%] | IR Opp [%] | Impact Type Ego | Impact Type Opp |
| 31 | 0.1 | 0.1 | Side | Front | 0.2 | 0.2 | Near side | Front | 0.2 | 0.2 | Side | Side |
| 32 | 0.3 | 0.2 | Near side | Front | 0.9 | 0.3 | Near side | Front | 0.5 | 0.2 | Side | Side |
| 33 | 0.5 | 0.3 | Near side | Front | 2.6 | 0.8 | Near side | Front | 0.7 | 0.3 | Near side | Front |
| 34 | 0.9 | 0.6 | Near side | Front | 15 | 6 | Side | Front | 0.2 | 0.1 | Side | Front |
| 35 | 1.6 | 1.5 | Side | Front | 22.6 | 20.9 | Front | Front | 1 | 0.4 | Near side | Front |
| 36 | 9.2 | 6.7 | Side | Front | 24.1 | 21.9 | Front | Front | 1.3 | 0.5 | Side | Front |
| 37 | 29.1 | 38.9 | Front | Front | 41.5 | 38.3 | Front | Front | 1.8 | 0.6 | Near side | Front |
| 38 | 48 | 54.4 | Front | Front | 27.9 | 25.3 | Front | Front | 1.3 | 0.5 | Near side | Front |
| 39 | 34.3 | 35.4 | Front | Front | 8 | 6.5 | Front | Front | 0.8 | 0.3 | Near side | Front |
| 40 | 83.4 | 83.3 | Front | Front | 6.4 | 4.3 | Front | Front | 0.2 | 0.2 | Side | Front |
| 41 | 78.6 | 78.5 | Front | Front | 0.8 | 0.5 | Front | Side | 1 | 0.4 | Near side | Front |
| 42 | 78.2 | 77.6 | Front | Front | 0.2 | 0.2 | Front | Near side | 2.3 | 0.8 | Near side | Front |
| 43 | 80.2 | 77.9 | Front | Front | - | - | - | - | - | - | - | - |
| 44 | 27.5 | 26 | Front | Front | - | - | - | - | - | - | - | - |
| 45 | 52.4 | 73.5 | Front | Front | - | - | - | - | - | - | - | - |
| 46 | 10.8 | 9.6 | Front | Side | - | - | - | - | - | - | - | - |
| 47 | 2.9 | 4.3 | Front | Near side | - | - | - | - | - | - | - | - |
| 48 | 1.2 | 2.2 | Front | Near side | - | - | - | - | - | - | - | - |
| 49 | 0.5 | 0.9 | Front | Near side | - | - | - | - | - | - | - | - |
| 50 | 0.2 | 0.1 | Front | Side | - | - | - | - | - | - | - | - |
| 51 | 0.1 | 0.1 | Front | Side | - | - | - | - | - | - | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulino, M.-S.; Vangi, D.; Damaziak, K. Performance Assessment in a “Lane Departure” Scenario of Impending Collision for an ADAS Logic Based on Injury Risk Minimisation. Designs 2023, 7, 59. https://doi.org/10.3390/designs7030059
Gulino M-S, Vangi D, Damaziak K. Performance Assessment in a “Lane Departure” Scenario of Impending Collision for an ADAS Logic Based on Injury Risk Minimisation. Designs. 2023; 7(3):59. https://doi.org/10.3390/designs7030059
Chicago/Turabian StyleGulino, Michelangelo-Santo, Dario Vangi, and Krzysztof Damaziak. 2023. "Performance Assessment in a “Lane Departure” Scenario of Impending Collision for an ADAS Logic Based on Injury Risk Minimisation" Designs 7, no. 3: 59. https://doi.org/10.3390/designs7030059
APA StyleGulino, M. -S., Vangi, D., & Damaziak, K. (2023). Performance Assessment in a “Lane Departure” Scenario of Impending Collision for an ADAS Logic Based on Injury Risk Minimisation. Designs, 7(3), 59. https://doi.org/10.3390/designs7030059