
LiBAT: A High-Performance AC Battery System for Transport Applications


 and
and
Abstract
:1. Introduction
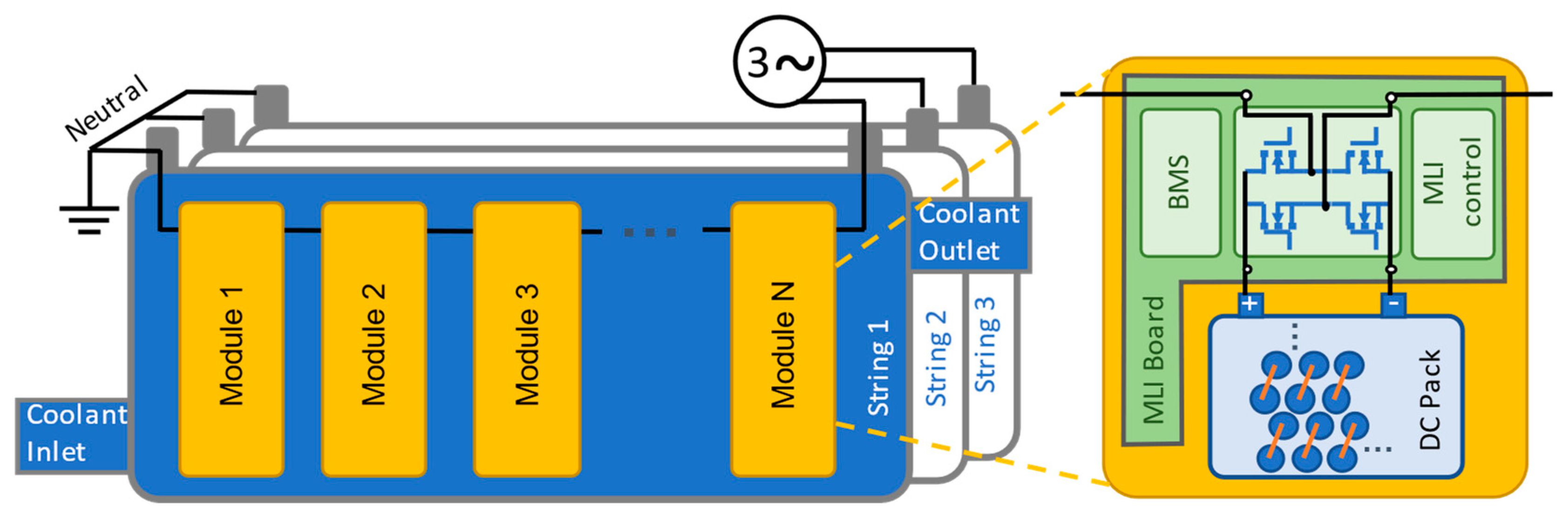
2. Modular AC-Battery Concept and Design Principles
- A reduction in system components leading to indirect mass and space savings.
- Modularity and scalability. The LiBAT technology is applicable to a wide range of system voltages and capacities.
- Performance increase. MLI has higher efficiencies due to the lower switching losses. Furthermore, direct immersion cooling boosts the operation power range of the MLI.
- Reliability. The battery system can compensate for the failure of single cells or inhomogeneities.
- Safety. When not in operation, only low voltage is present in the system. Furthermore, the powerful cooling system makes operation at high power feasible and prevents overheating and thermal runaway propagation.
3. Glider Application for Demonstration
3.1. Application Targets and Requirements
- The electrical energy system (EES) shall be divided into an even number of battery units, forming two sets of equal mass, one for each wing. The dimensions of one battery unit shall not exceed 110 × 200 × 1500 mm.
- The mass of the EES shall not exceed 55 kg (including the interconnections, housing, battery cells, connectors, protection devices and integrated electronics).
- The EES shall have an energy density >200 Wh/kg available at 1 C discharge.
- The EES shall include a high-power battery charger from 115 V AC/400 Hz airport ground power carts or three-phase 240 V–380 V AC/50 Hz euro grid power able to reach a charging power capability ≥60 W/kg.
- The EES shall have the capability to connect the pack directly and simultaneously to two suitable three-phase electric motors providing peak power of >500 W/kg for at least 2 min, and continuous minimum power of 20 kW shall be provided by the EES to the motors.
3.2. LiBAT Detailed Architecture for the Glider Application
EES Dimensioning and Geometrical Design
4. Methods for System Verification and Validation
4.1. Simulation (Verification)
4.2. Prototyping (Validation)
5. Results and Discussion
5.1. Simulation Results
5.1.1. Motoring Use Case
5.1.2. Charging Use Case
5.2. Prototyping for Motor Testing
5.3. Mass Discussion
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Cell | An individual lithium battery, usually 3.6 Volts nominal |
| Supercell | Several cells connected in parallel, with the same nominal voltage |
| Battery | A collection of cells to meet an energy and power requirement |
| Module | A combined battery and MLI board that can generate plus or minus full battery voltages or operate in pulse-width modulation mode to generate any voltage in between |
| String | A series connection of modules to generate higher voltages than a single battery module |
| MLI | Multi-level inverter. The power electronics that switch module voltage |
| Ron (Ω) | On-resistance of a MOSFET |
| BMS | Battery management system |
| SoC (%) | Battery or cell state of charge, 0 to 100 |
| Controller | A computer or micro-controller that controls the operation of modules to meet the motor or charge control requirements |
| FOC | Field-oriented control |
| EMC | Electro-magnetic compatibility (sometimes called EMI interference) |
| ECU | Electronic control unit; the computer used to control a vehicle |
| EES | Electrical energy system. Comprises two battery units (located in two wings) and necessary auxiliaries, power electronics and cooling system |
| EEC | Electrical equivalent circuit model |
| PWM | Pulse-width modulation |
| THD | Total harmonic distortion |
Appendix A. Cell Properties

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Temperature Range (°C) | 0 °C < Tsurf < 10 °C | 10 °C ≤ Tsurf ≤ 45 °C | 45 °C < Tsurf < 60 °C | |
|---|---|---|---|---|
| Maximum charge voltage (V) | Ucha,max | 4.15 | 4.25 | 4.20 |
| Cut-off voltage (V) | Udis,min | 2.0 | 2.0 | 2.0 |
| Recommended charge current (A) | Icha,rec,cont | 2.0 | 3.0 | 2.0 |
| Maximum charge current (A) | Icha,max,cont | 4.0 | 5.0 | 5.0 |
| Maximum pulsed-charge current (A) | Icha,max,pulse | 6.0 | ||
| Continuous maximum discharge current (80 °C cut-off) (A) | Idis,max,cont | 30 | ||
| Pulse length (s) | <40 | <19 | <6 | |
| Maximum pulsed-discharge current (Tentative) (A) | Idis,max,pulse | 30~40 | 55 | 80 |
Appendix B. Mass Breakdown
- (a)
- Shorten sensor cables; use smaller connectors.
- (b)
- Cut out pockets and optimize the structure for light weight.
- (c)
- Reduce the thickness of the aluminum plate.
- (d)
- Integrate thermal management of power electronics even further by immersing MLIs into the coolant.
- (e)
- Integrate all modules into one single housing, reducing also the number of piping fittings.
- (f)
- Reduce coolant volume through an advanced pump, cooling cycle and piping design.
- (g)
- Clamps can be omitted in a final setup.
- (h)
- Optimize size and used components.
- (i)
- Shorten cables.
| Component | Weight (g) | Count | Weight in Demonstrator (g) | ||
|---|---|---|---|---|---|
| Built | After Trivial Optimization | After Design Optimization | |||
| Battery cell | 46.6 | 360 | 16,776 | 16,776 | 16,776 |
| Sense cabling | 30 | 15 | 450 | 250 a | 250 |
| Tabs 2 × 2 | 2.17 | 150 | 325.5 | 325.5 | 325.5 |
| Tabs 4 × 1 | 2 | 15 | 30 | 30 | 30 |
| Tab terminal | 1.7 | 30 | 51 | 51 | 51 |
| Lower cell holder | 278 | 3 | 834 | 834 | 700 b |
| Upper cell holder | 278 | 3 | 834 | 834 | 700 |
| Aluminum plate | 339 | 3 | 1017 | 500 c | 0 d |
| Housing | 224.5 | 3 | 673.5 | 673.5 | 640 e |
| Fitting | 8.7 | 6 | 52.2 | 52.2 | 17.4 e |
| Novec in string | 360 | 3 | 1080 | 1080 | 950 f |
| Novec in cooling cycle | - | - | 1540 | 1000 f | 730 f |
| Pump | 1000 | 1 | 1000 | 1000 | 800 f |
| Pipes | - | - | 600 | 250 f | 100 f |
| Cooling cycle components | - | - | 1100 | 300 f | 200 f |
| Clamps | 31 | 12 | 372 | 0 g | 0 |
| Reservoir | 71 | 1 | 71 | 71 | 71 |
| Shunt | 14 | 3 | 42 | 42 | 42 |
| LMM (incl. crews) | 38.5 | 15 | 577.5 | 300 h | 300 |
| LCM | 160 | 1 | 160 | 120 h | 120 |
| IsoSPI cable | 3.7 | 15 | 55.5 | 25 i | 25 |
| Total weight (kg) | 27.642 | 24.534 | 22.833 | ||
References
- Horowitz, C.A. Paris Agreement. Int. Leg. Mater. 2016, 55, 740–755. [Google Scholar] [CrossRef]
- IEA. Outlook 2016 beyond One Million Electric Cars IEA; International Energy Agency: Paris, France, 2016. [Google Scholar]
- Directorate-General for Mobility and Transport. Flightpath 2050: Europe’s Vision for Aviation: Maintaining Global Leadership and Serving Society’s Needs; European Commission, Publications Office of the European Union: Luxembourg, 2011. [Google Scholar]
- Gröger, O.; Gasteiger, H.A.; Suchsland, J.-P. Review—Electromobility: Batteries or Fuel Cells? J. Electrochem. Soc. 2015, 162, A2605–A2622. [Google Scholar] [CrossRef]
- Shen, W.; Han, W.; Chock, D.; Chai, Q.; Zhang, A. Well-to-wheels life-cycle analysis of alternative fuels and vehicle technologies in China. Energy Policy 2012, 49, 296–307. [Google Scholar] [CrossRef]
- Baharozu, E.; Soykan, G.; Ozerdem, M.B. Future aircraft concept in terms of energy efficiency and environmental factors. Energy 2017, 140, 1368–1377. [Google Scholar] [CrossRef]
- Dijk, M.; Orsato, R.J.; Kemp, R. The emergence of an electric mobility trajectory. Energy Policy 2013, 52, 135–145. [Google Scholar] [CrossRef]
- Kimur, A.; Ando, I.; Itagaki, K. Development of Hybrid System for SUV. In Proceedings of the SAE World Congress, Detroit, MI, USA, 11–14 April 2005. [Google Scholar]
- Tarascon, J.A.M. Issues and challenges facing rechargeable lithium batteries. Nature 2001, 414, 359–367. [Google Scholar] [CrossRef]
- Nitta, N.; Wu, F.; Lee, J.T.; Yushin, G. Li-ion battery materials: Present and future. Mater. Today 2015, 18, 252–264. [Google Scholar] [CrossRef]
- Fichtner, M. Recent Research and Progress in Batteries for Electric Vehicles. Batter. Supercaps 2022, 5, e202100224. [Google Scholar] [CrossRef]
- McDonald, R.A. Fundamental Sizing Implications of Constant or Invreasing Weight Aircraft. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSM, Indianapolis, Indiana, 17–19 September 2012. [Google Scholar]
- Thielmann, A.; Sauer, A.; Isenmann, R.A.; Wietschel, M.; Plötz, P. Gesamt-Roadmap Lithium-Ionen-Batterien 2030 (Engl. Translation: Overall Roadmap for Lithium-Ion Batteries 2030); Fraunhofer-Institut für System und Innovationsforschung ISI: Karlsruhe, Germany, 2015. [Google Scholar]
- Thielmann, A.; Sauer, A.; Isenmann, R.A.; Wietschel, M. Gesamt-Roadmap Energiespeicher für die Elektromobilität 2030 (Engl. Translation: Energy-Storage Overall Roadmap for Electromobility 2030); Fraunhofer, I.S.I.: Karlsruhe, Germany, 2012. [Google Scholar]
- Tolbert, L.M.; Peng, F.Z.; Habetler, T.G. Multilevel converters for large electric drives. IEEE Trans. Ind. Appl. 1999, 35, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Riley, P.H.; Dordevic, O.; Pullen, K.; DeLilo, L. A Qualitative Assessment of a Modified Multilevel Converter Topology M2LeC for Lightweight Low-Cost Electric Propulsion. Engineering 2020, 12, 496–515. [Google Scholar] [CrossRef]
- Tolbert, L.M.; Peng, F.Z.; Cunnyngham, T.; Chiasson, J.N. Charge balance control schemes for cascade multilevel converter in hybrid electric vehicles. IEEE Trans. Ind. Electron. 2002, 49, 1058–1064. [Google Scholar] [CrossRef] [Green Version]
- Quraan, M.; Tricoli, P.; D’Arco, S.; Piegari, L. Efficiency assessment of modular multilevel converters for battery electric vehicles. IEEE Trans. Power Electron. 2016, 32, 2041–2051. [Google Scholar] [CrossRef]
- Riley, P.H. Design of Multi-Level Converters for cost and mass reduction. In Proceedings of the 6th International Conference IQPC Automotive Battery Management Systems, EV/HEVs, Berlin, Germany, 16–19 September 2019. [Google Scholar]
- Kim, J.; Oh, J.; Lee, H. Review on battery thermal management system for electric vehicles. Appl. Therm. Eng. 2019, 149, 192–212. [Google Scholar] [CrossRef]
- Chen, D.; Jiang, J.; Kim, G.-H.; Yang, C.; Pesaran, A. Comparison of different cooling methods for lithium ion battery cells. Appl. Therm. Eng. 2016, 94, 846–854. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Gao, Q.; Wang, G.; Lu, P.; Zhao, M.; Bao, W. A review on research status and key technologies of battery thermal management and its enhanced safety. Int. J. Energy Res. 2018, 42, 4008–4033. [Google Scholar] [CrossRef]
- Dubey, P.; Pulugundla, G.; Srouji, A.K. Direct comparison of immersion and cold-plate based cooling for automotive Li-ion battery modules. Energies 2021, 14, 1259. [Google Scholar] [CrossRef]
- Sundin, D.W.; Sponholtz, S. Thermal management of Li-ion batteries with single-phase liquid immersion cooling. IEEE Open J. Veh. Technol. 2020, 1, 82–92. [Google Scholar] [CrossRef]
- Development of a High Voltage Lithium BATtery. Available online: https://project-libat.eu/ (accessed on 20 January 2023).
- HORIZON 2020, Development of a High Voltage Lithium BATtery. Available online: https://cordis.europa.eu/project/id/821226/de (accessed on 20 January 2023).
- EUCAR. Battery Requirements for Future Automotive Applications, July 2019. 2019. Available online: https://eucar.be/wp-content/uploads/2019/08/20190710-EG-BEV-FCEV-Battery-requirements-FINAL.pdf (accessed on 20 January 2023).
- Reif, K.; Noreikat, K.-E.; Borgeest, K. Kraftfahrzeug-Hybridantriebe: Grundlagen, Komponenten, Systeme, Anwendungen (Engl. Translation: Vehicle Hybridpropultion: Fundamentals, Components, Stystems, Applications); Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Bacchini, A.; Cestino, E. Electric VTOL configurations comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef] [Green Version]
- Reddy, T.B. Linden’s Handbook of Batteries; McGraw-Hill Education: Singapore, 2011. [Google Scholar]
- Asadi, H.; Tahoori, M.B.; Fazeli, M.; Miremadi, S.G. Efficient algorithms to accurately compute derating factors of digital circuits. Microelectron. Reliab. 2012, 52, 1215–1226. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency EASA. Sailplane Rule Book—Easy Access Rules—Revision from September 2020. 2020. Available online: https://www.easa.europa.eu/en/downloads/94424/en (accessed on 20 January 2023).
- Cardenas, A.; Eckhardt, J.; Wasner, J.; Dordevic, O.; Riley, P.H.; Le Peuvédic, J.-M.; Dahlhaus, J. Light Battery Pack for High Power Applications in Aviation—Simulation Methods in Early Stage Design. In Proceedings of the International Conference on Electric and Hybrid Aerospace Technologies ICEHAT, Paris, France, 25–26 June 2020. [Google Scholar]
- TINA: Circuit Simulator for Analog, Digital, MCU and RF Circuits. Available online: https://www.tina.com/ (accessed on 19 January 2023).
- Modelica Association. Modelica Standard Library. Available online: https://doc.modelica.org/ (accessed on 19 January 2023).
- Dvorak, D.; Bäuml, T.; Holzinger, A.; Popp, H. A comprehensive algorithm for estimating lithium-ion battery parameters from measurements. IEEE Trans. Sustain. Energy 2018, 9, 771–779. [Google Scholar] [CrossRef]
- Plexim Simulation Software for Power Electronic Systems. Available online: https://www.plexim.com/ (accessed on 20 January 2023).
- Hirase, Y.; Sugimoto, K.; Shindo, Y. A grid-connected inverter with virtual synchronous generator model of algebraic type. Electr. Eng. Jpn. 2013, 184, 10–21. [Google Scholar] [CrossRef]
- LION Smart Battery Management System. Available online: https://lionsmart.com/en/battery-management-system/ (accessed on 19 January 2023).
- Arranz-Gimon, A.; Zorita-Lamadrid, A.; Morinigo-Sotelo, D.; Duque-Perez, O. A review of total harmonic distortion factors for the measurement of harmonic and interharmonic pollution in modern power systems. Energies 2021, 14, 6467. [Google Scholar] [CrossRef]
- Löbberding, H.; Wessel, S.; Offermanns, C.; Kehrer, M.; Rother, J.; Heimes, H.; Kampker, A. From Cell to Battery System in BEVs: Analysis of System Packing Efficiency and Cell Types. World Electr. Veh. J. 2020, 11, 77. [Google Scholar] [CrossRef]









| Application | BEVs | PHEVs | VTOLs | Power Tools | E-Glider | E-MOTORCYCLES |
|---|---|---|---|---|---|---|
| Typical cont. C-rates | 2 | 3–5 | 2–3 | 15+ | 3 | 0.5–3 |
| Typical power (kW) | 125–200 | 20–100 | 60–230 | Up to 2 | 10–30 | 10–100 |
| Typical capacity (kWh) | 60–100 | 5–20 | 15–60 | 0.5 | 5–10 | 5–15 |
| Use Case | Requirement |
|---|---|
| 1. Battery charging | Charging power > 1.65 kW from three-phase 115 V AC/50 Hz |
| 2. Motoring for level flight | Cont. discharge power > 3.25 kW to drive three-phase motor |
| 3. Motoring for self-launch | Peak discharge power > 13.75 kW to drive three-phase motor |
| Module | Time Scale | Simulation Method |
|---|---|---|
| PWM switching | 20 µs | |
| MLI switching | 100 µs |
|
| Battery electric dynamics | 100 ms |
|
| Thermal effects | 10 s |
|
| Motor Pel (kW) | 10 | 13.75 | |||
|---|---|---|---|---|---|
| Architecture EES/PMSM | Y/∆ | Y/Y | ∆/Y | ∆/Y | |
| Supercell Current I (A) (2Icell = IMOSFET) | Max | 107.7 | 47.3 | 19.6 | 36.6 |
| Min | −144.1 | −83.7 | −47.4 | −63.6 | |
| RMS | 63.3 | 33.6 | 23.8 | 35.1 | |
| Rect. Mean. | 46.3 | 22.4 | 16.9 | 26.5 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cárdenas Miranda, A.; Dahlhaus, J.; Dordevic, O.; Eckhardt, J.; Faessler, V.; Le-Peuvedic, J.-M.; Riley, P.H.; Wasner, J. LiBAT: A High-Performance AC Battery System for Transport Applications. Designs 2023, 7, 74. https://doi.org/10.3390/designs7030074
Cárdenas Miranda A, Dahlhaus J, Dordevic O, Eckhardt J, Faessler V, Le-Peuvedic J-M, Riley PH, Wasner J. LiBAT: A High-Performance AC Battery System for Transport Applications. Designs. 2023; 7(3):74. https://doi.org/10.3390/designs7030074
Chicago/Turabian StyleCárdenas Miranda, Alejandro, Jan Dahlhaus, Obrad Dordevic, Julia Eckhardt, Victor Faessler, Jean-Marc Le-Peuvedic, Paul Howard Riley, and Josef Wasner. 2023. "LiBAT: A High-Performance AC Battery System for Transport Applications" Designs 7, no. 3: 74. https://doi.org/10.3390/designs7030074
APA StyleCárdenas Miranda, A., Dahlhaus, J., Dordevic, O., Eckhardt, J., Faessler, V., Le-Peuvedic, J. -M., Riley, P. H., & Wasner, J. (2023). LiBAT: A High-Performance AC Battery System for Transport Applications. Designs, 7(3), 74. https://doi.org/10.3390/designs7030074