Analysis of the Effects of the Viscous Thermal Losses in the Flute Musical Instruments



Abstract
:1. Introduction
- The system consisting of the musician-flute that was implemented and modeled. It consisted of an air compressor, a servo-valve, and an artificial mouth mounted to mimic the musician’s lungs and mouth. A control system was also developed to regulate the pressure and the flow delivered to the artificial mouth. Added to that, the flute exciter was directly coupled with the artificial mouth and some pressure and temperature sensors were placed within the resonator [17,18];
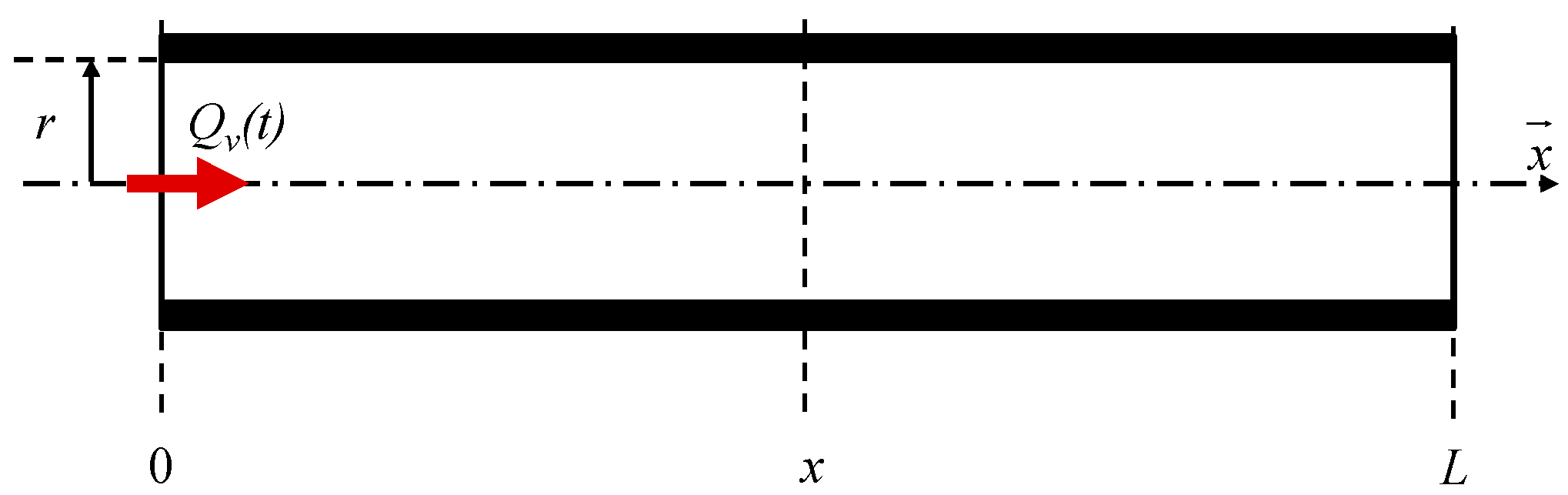
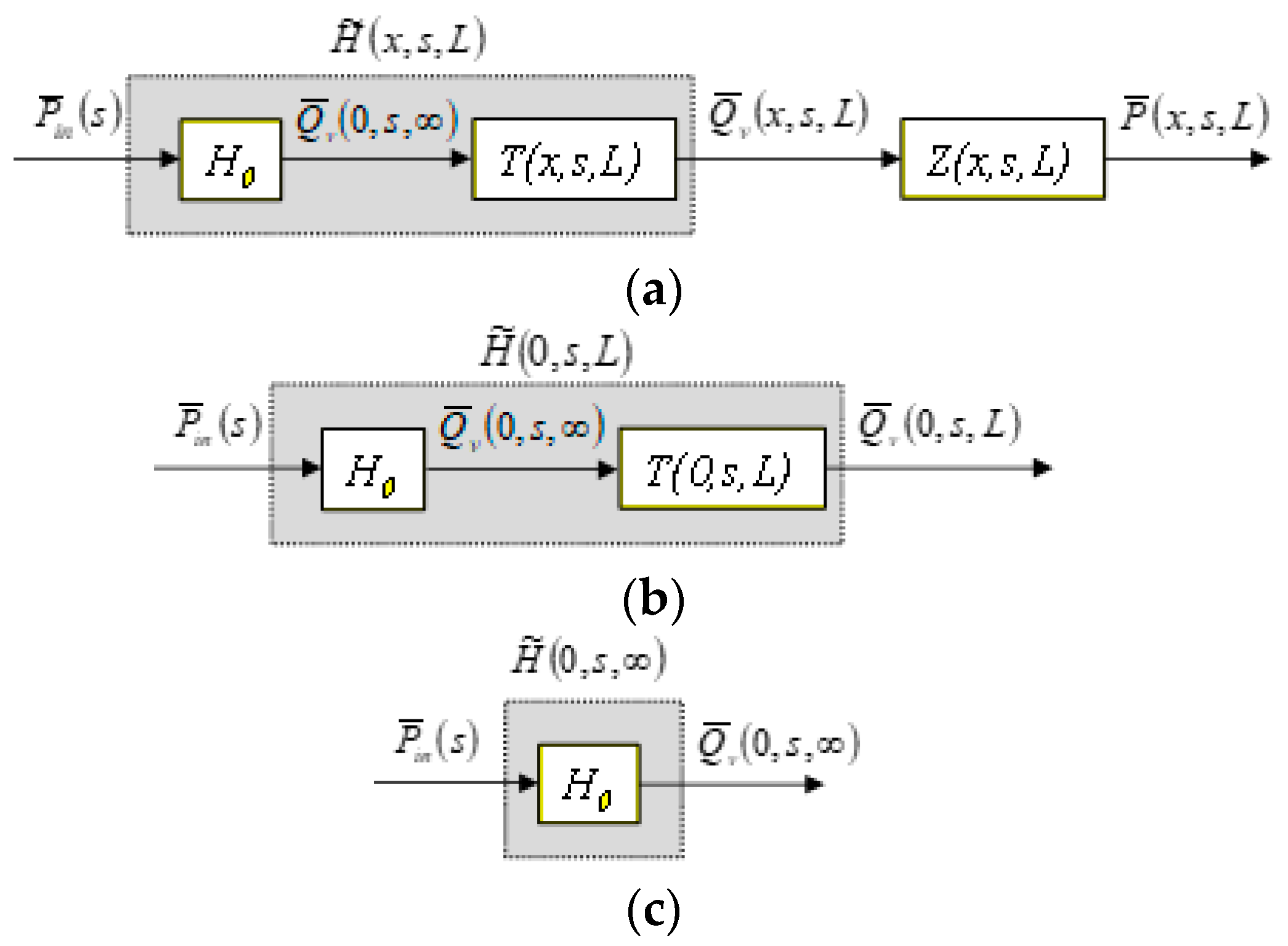
- The knowledge model was developed to represent the transfer between the pressure source at the input of the tube at x = 0 and the flow at any point x of the tube of length L and of constant radius r. Partial differential equations aiming to causally decompose the global model into sub-models, and thus to facilitate analysis in the frequency domain, were used in modelling [19].
2. Modelling
2.1. Schematisation, Configuration, and Setting in Equation
2.2. Resolution in the Symbolic Domain
- Using the Euler equation in the Laplace domain (second equation of the system (4)), that is,
- Introducing the general solution of in relation (7), that is,
- -
- Fractional derivative of order m + 1, i.e., 1.5 with m = 0.5, when s tends to zero;
- -
- Proportional, whose gain value is fixed by Zac/S, when s tends to infinity.
2.3. Frequency Response
3. System Approach
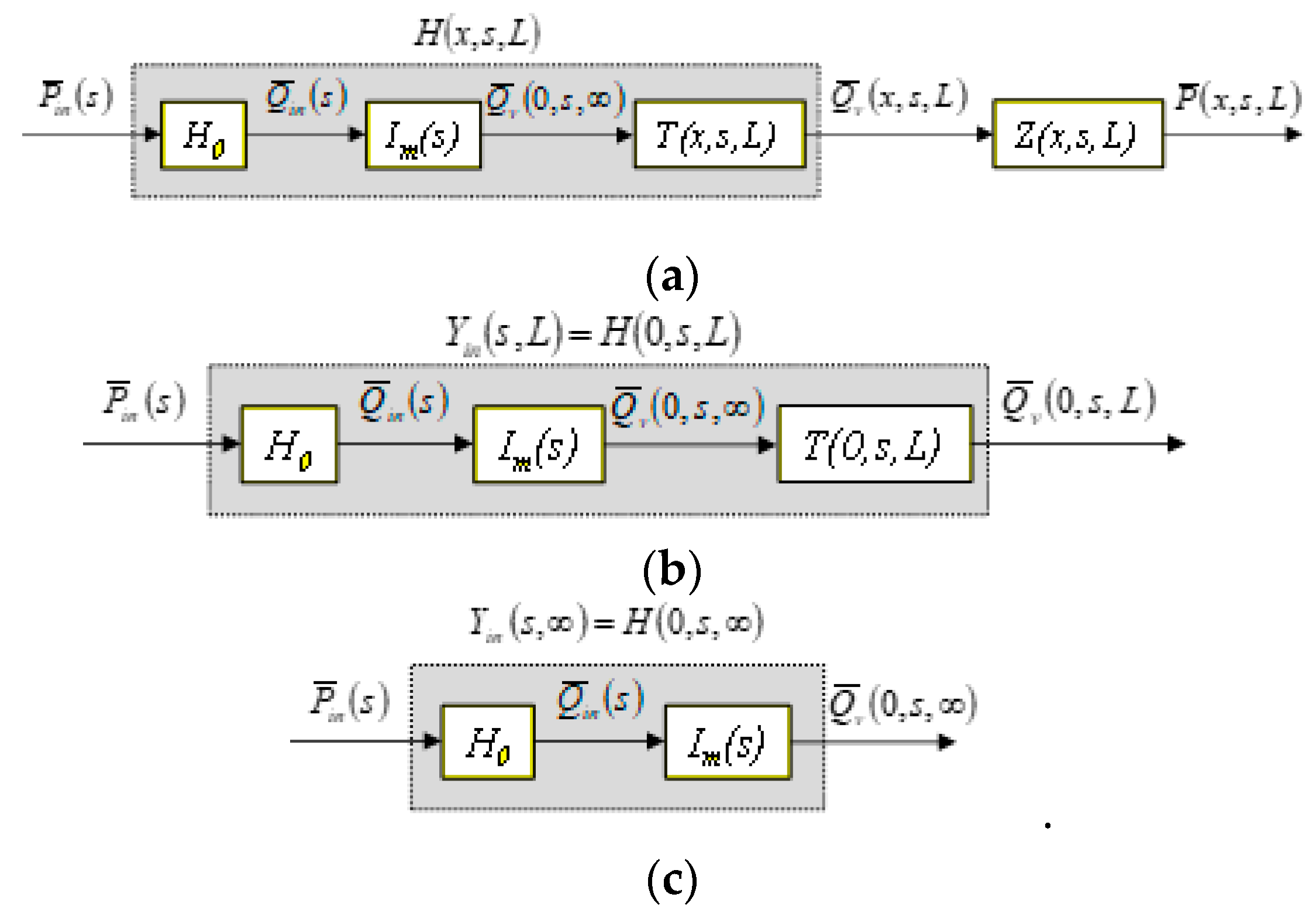
3.1. Decomposition of Admittance Y(x, s, L) into Subsystems
3.2. Frequency Analysis of the System Approach
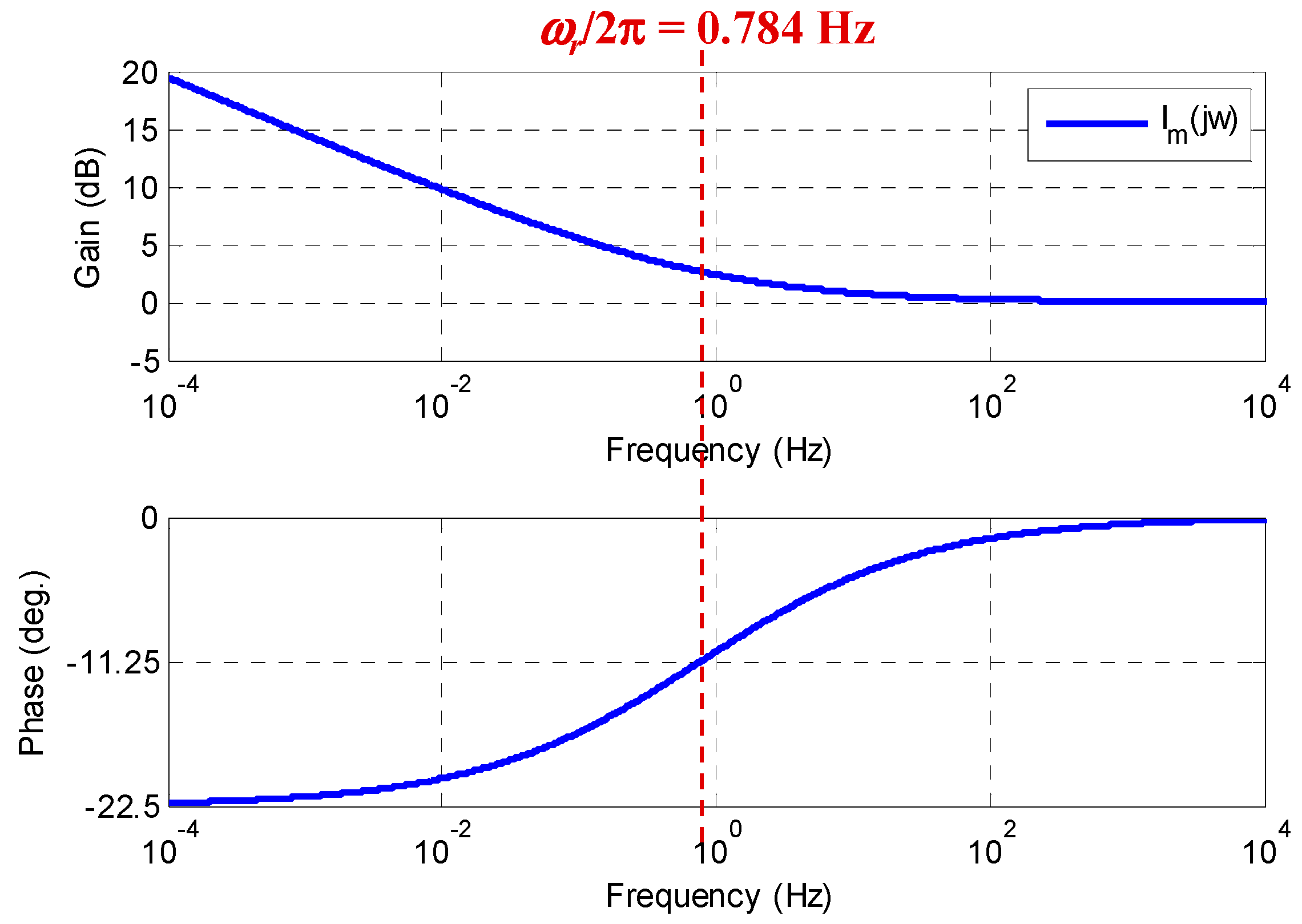
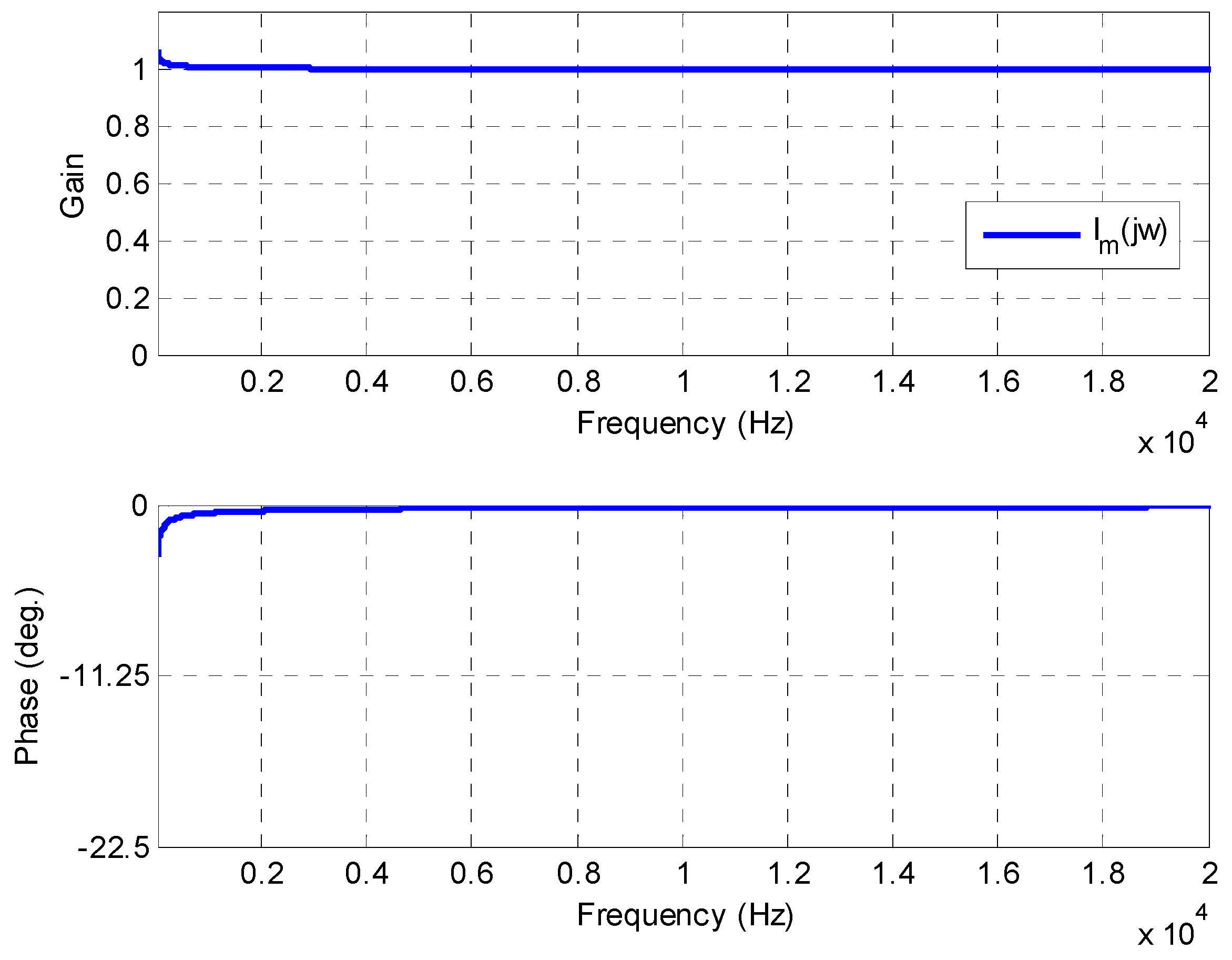
3.2.1. Analysis of Im(jω)
- For ω << ωr,m, a fractional integrative behavior of order m/2 = 0.25. Indeed,
- For ω >> ωr,m, unitary proportional behavior. Indeed,
- For ω << ωr,m, a gain diagram with a straight line with slope p = −m/2 × 20 dB/dec = −5 dB/dec and a phase diagram with a horizontal line at −m/2 × 90° = −22.5°;
- For ω >> ωr,m, a gain diagram with a horizontal line at 0 dB and a phase diagram with a horizontal line at 0°.
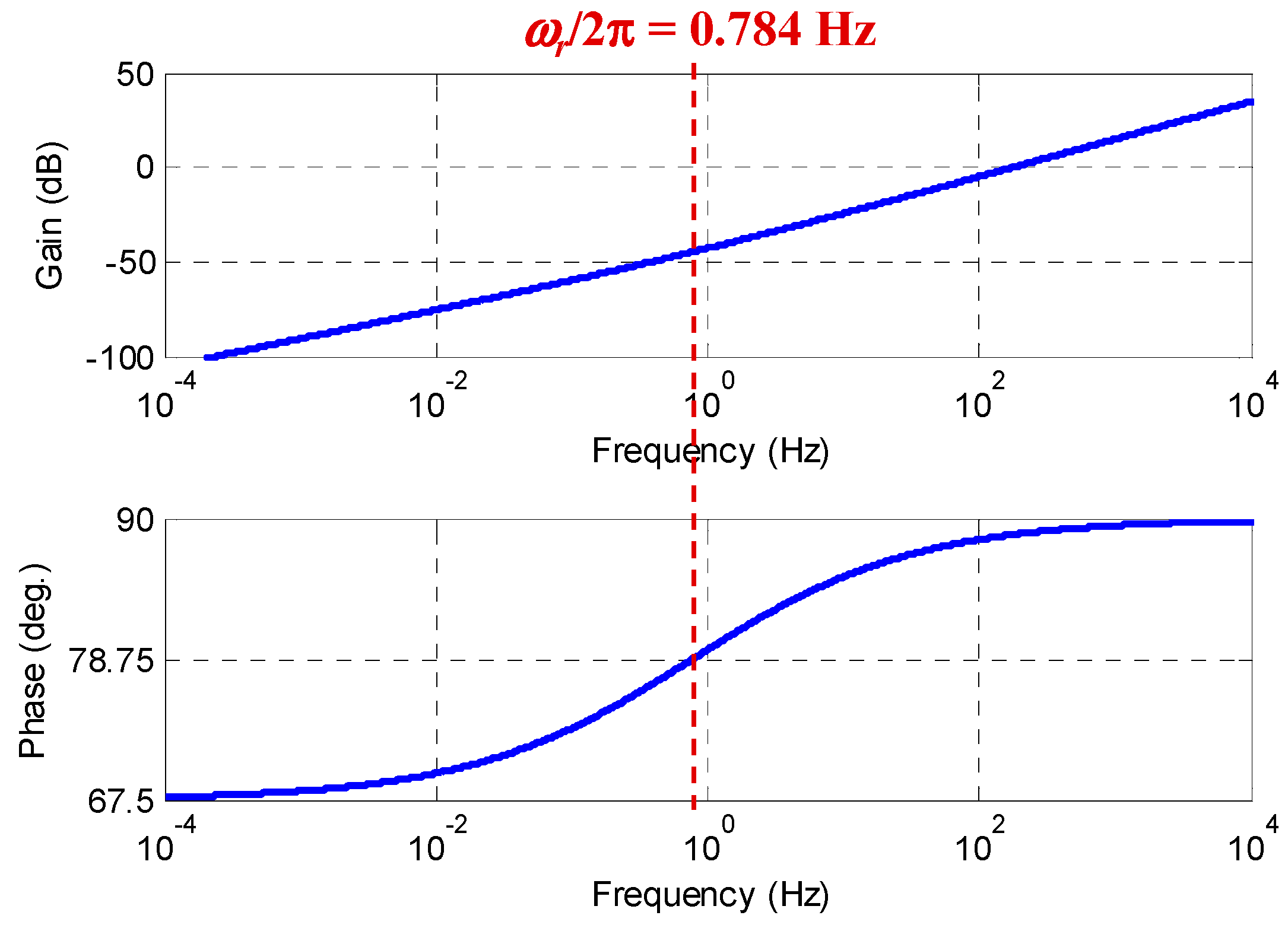
3.2.2. Analysis of F(0,jω,L)
- For ω << ωr,m, a fractional derivative behavior of order (1 − m/2) = 0.75. Indeed,
- Hence, the module and the argument
- For ωr << ω, a derivative behavior of order 1. Indeed,
- For ω << ωr,m, a gain diagram with a straight line with p1 = (1 − m/2) × 20 dB/dec = 15 dB/dec and a phase diagram with a horizontal line at (1 − m/2) × 90° = 67.5°;
- For ω >> ωr,m, a gain diagram with a straight line with slope p2 = 20 dB/dec and a phase diagram with a horizontal straight line at 90°.
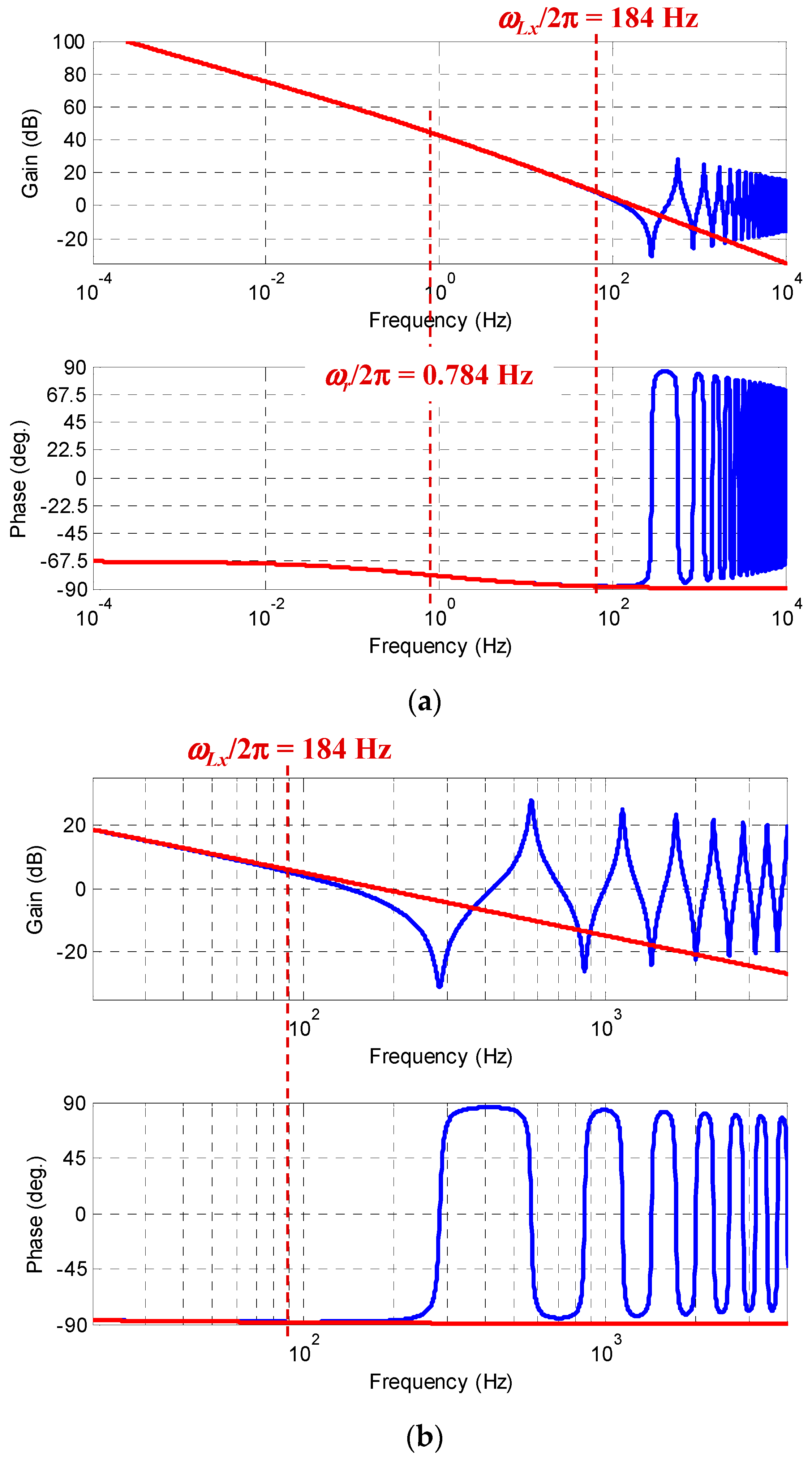
3.2.3. Analysis of T(0,jω,L)
- For w << ωL,x, an integrative behavior with two different orders according to the frequency range. Indeed,
- For ωL,x << ω, a behavior composed of an alternation of anti-resonances and resonances, and this without there being a simplification of the expression of T(x,jω,L) is:
- A fractional integration behavior of order −0.75 over the range [10−4; ωr/2π = 0.784] Hz is observed;
- An integrative behavior of order 1 over the range [ωr,m/2π = 0.784; ωL,x/2π = 184] Hz is observed.
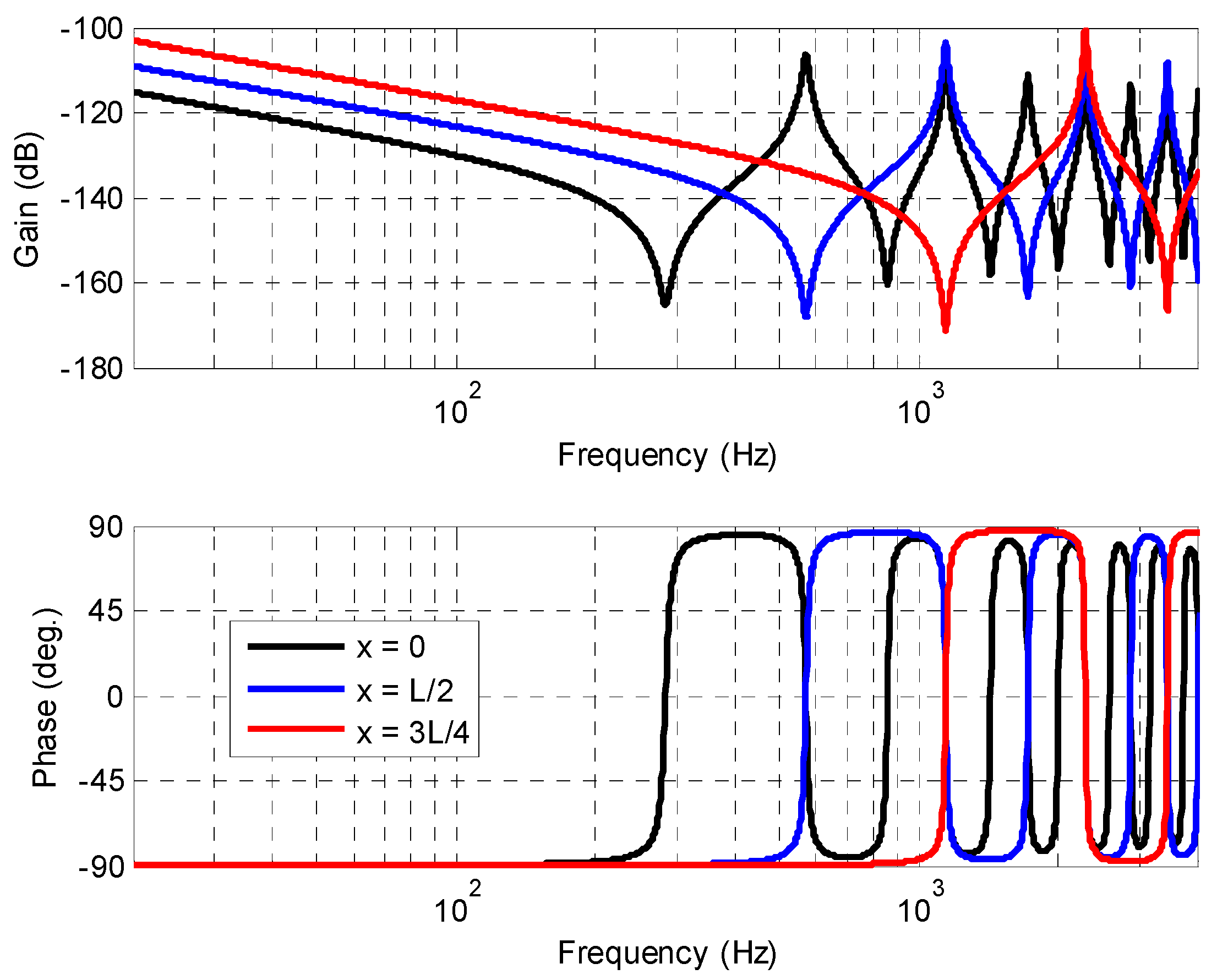
3.2.4. Analysis of H(x,jω,L)
- For ω << ωr << ωL,x, an orderly fractional integrative behavior—(1 − m/2) = −0.75, that is
- For ωr,m << ω << ωL,x, a derivative behavior of order 1, that is
- For ωL,x << ω, a behavior composed of an alternation of anti-resonances and resonances, that is,
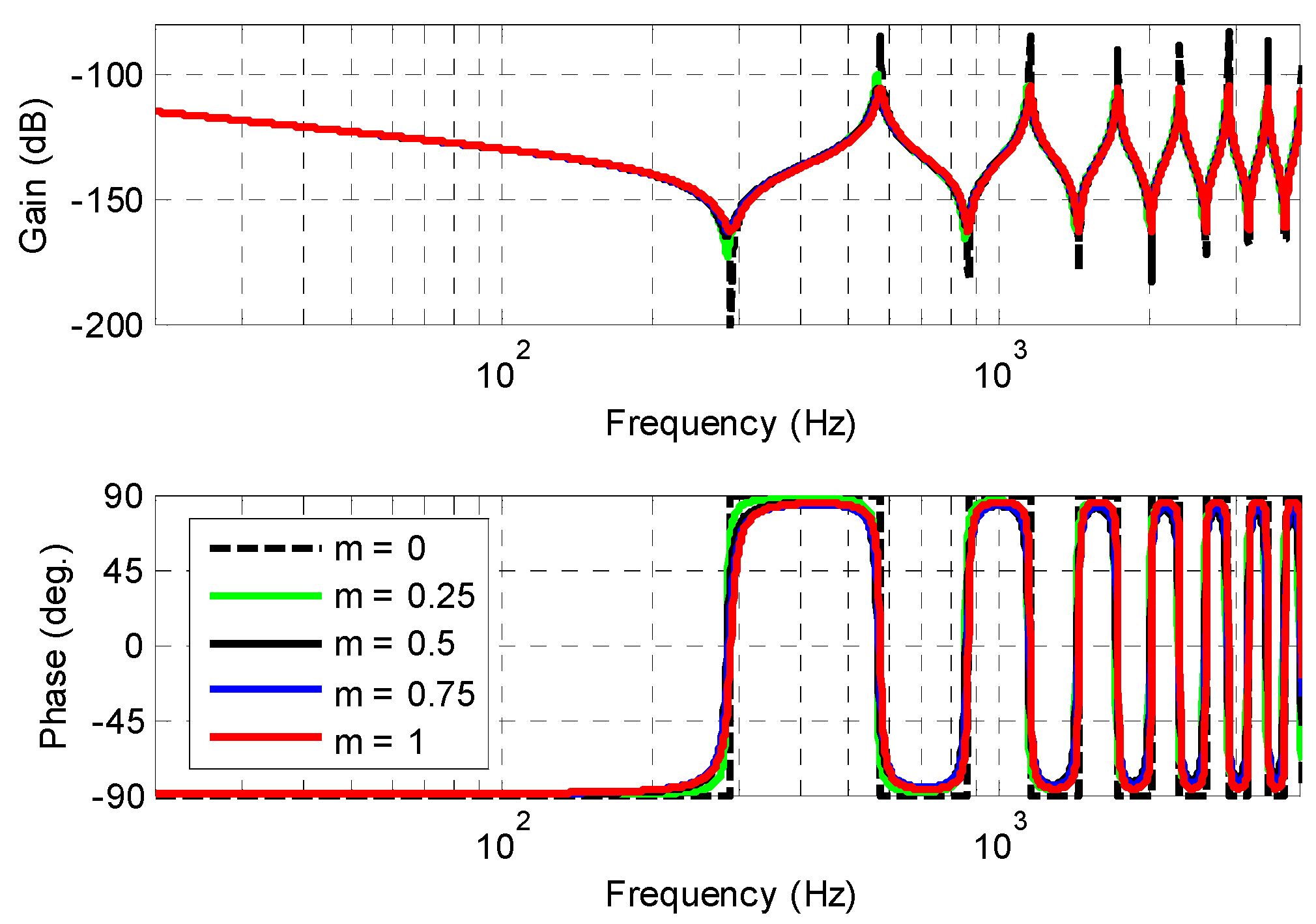
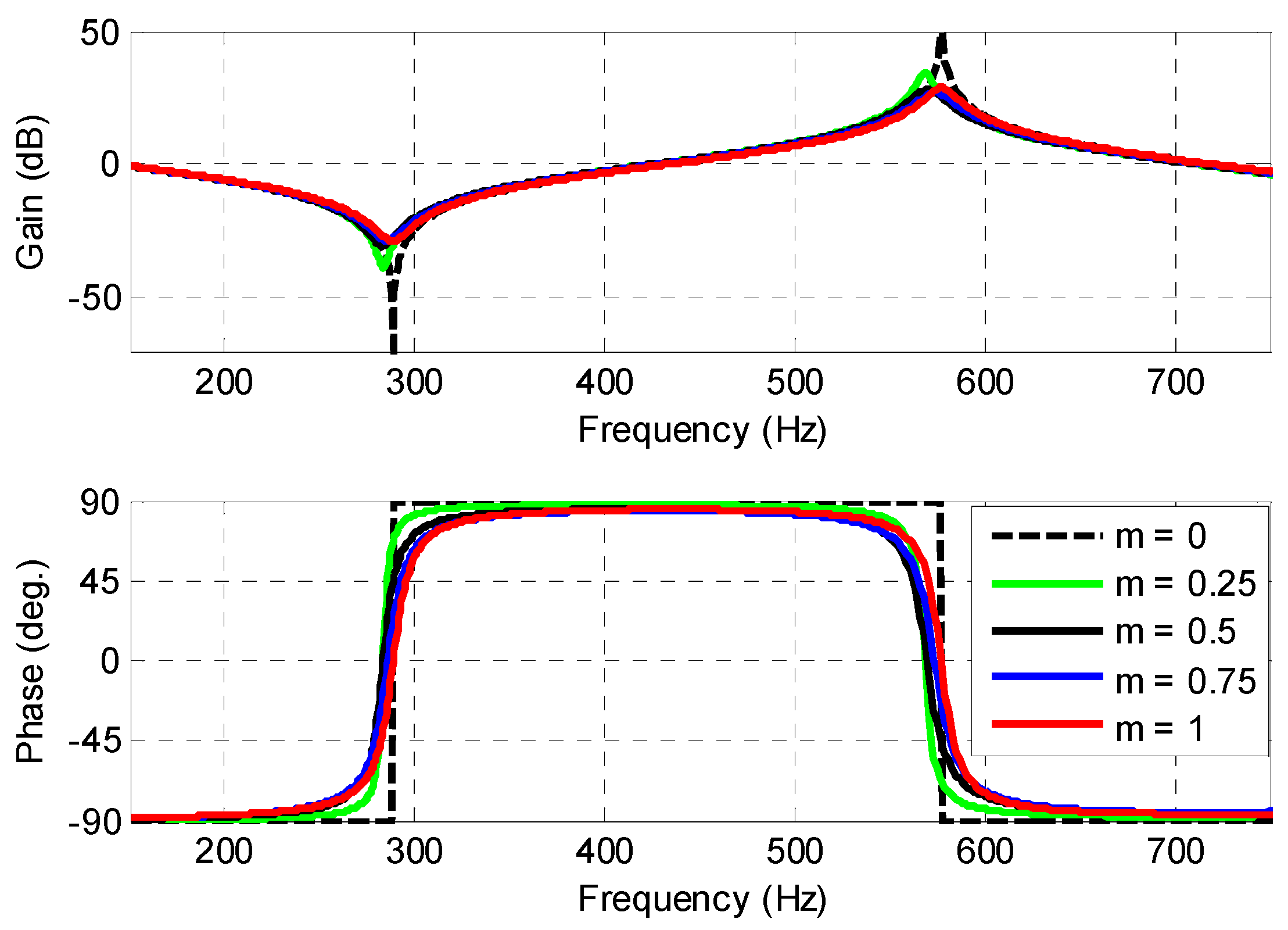
3.3. Study of the Influence of the Fractional Order m
- For gain diagrams, at the peaks of resonances and anti-resonances; quantifiable effects using quality factors Qzi for anti-resonances and Qpi for resonances clearly illustrate the phenomenon of dissipation associated with visco-thermal losses.
- For phase diagrams, at the crossing points at 0° with a local slope, which is all the more important as the order is small, and the slope becomes infinite for m = 0 (purely conservative case).
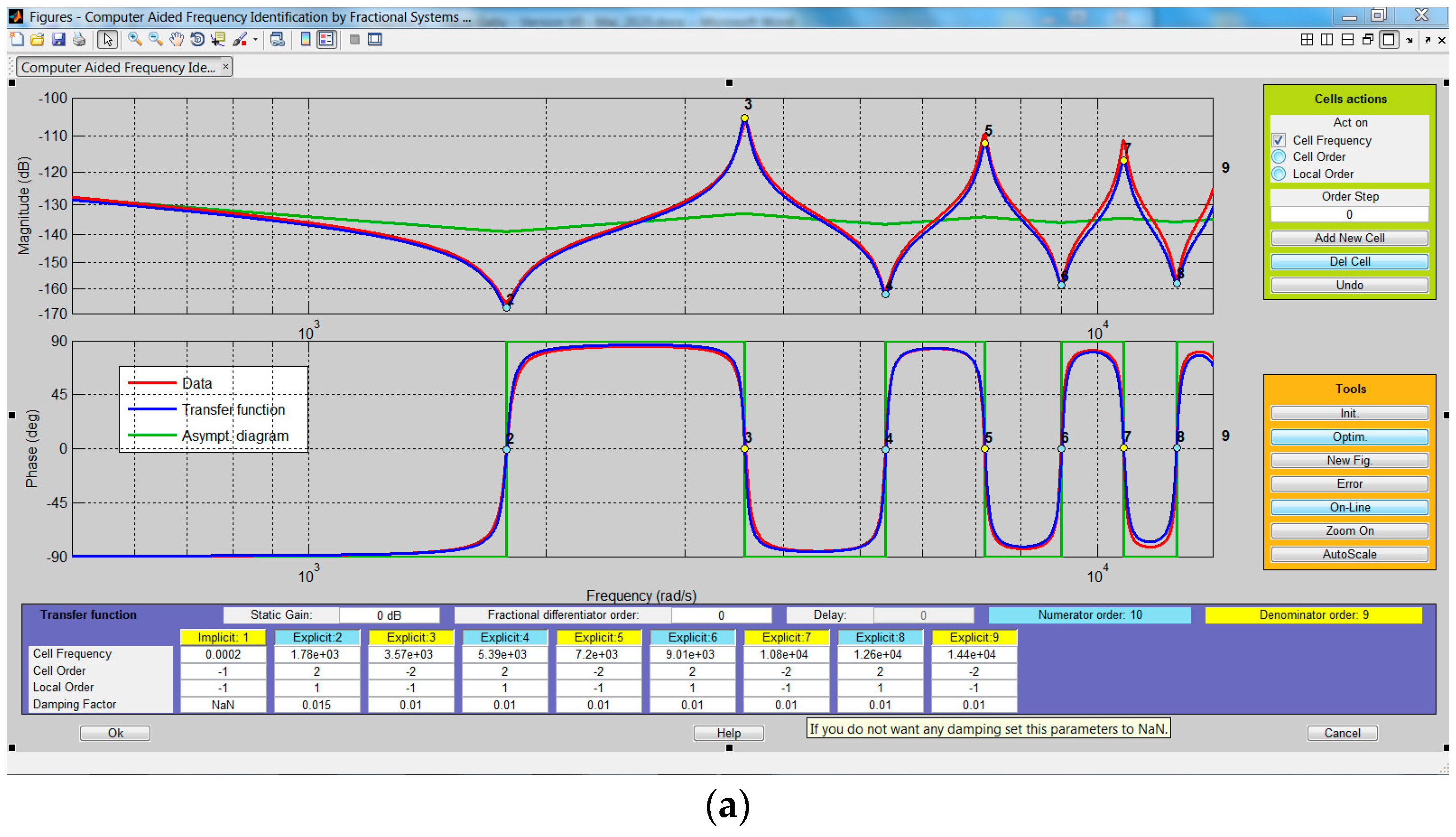
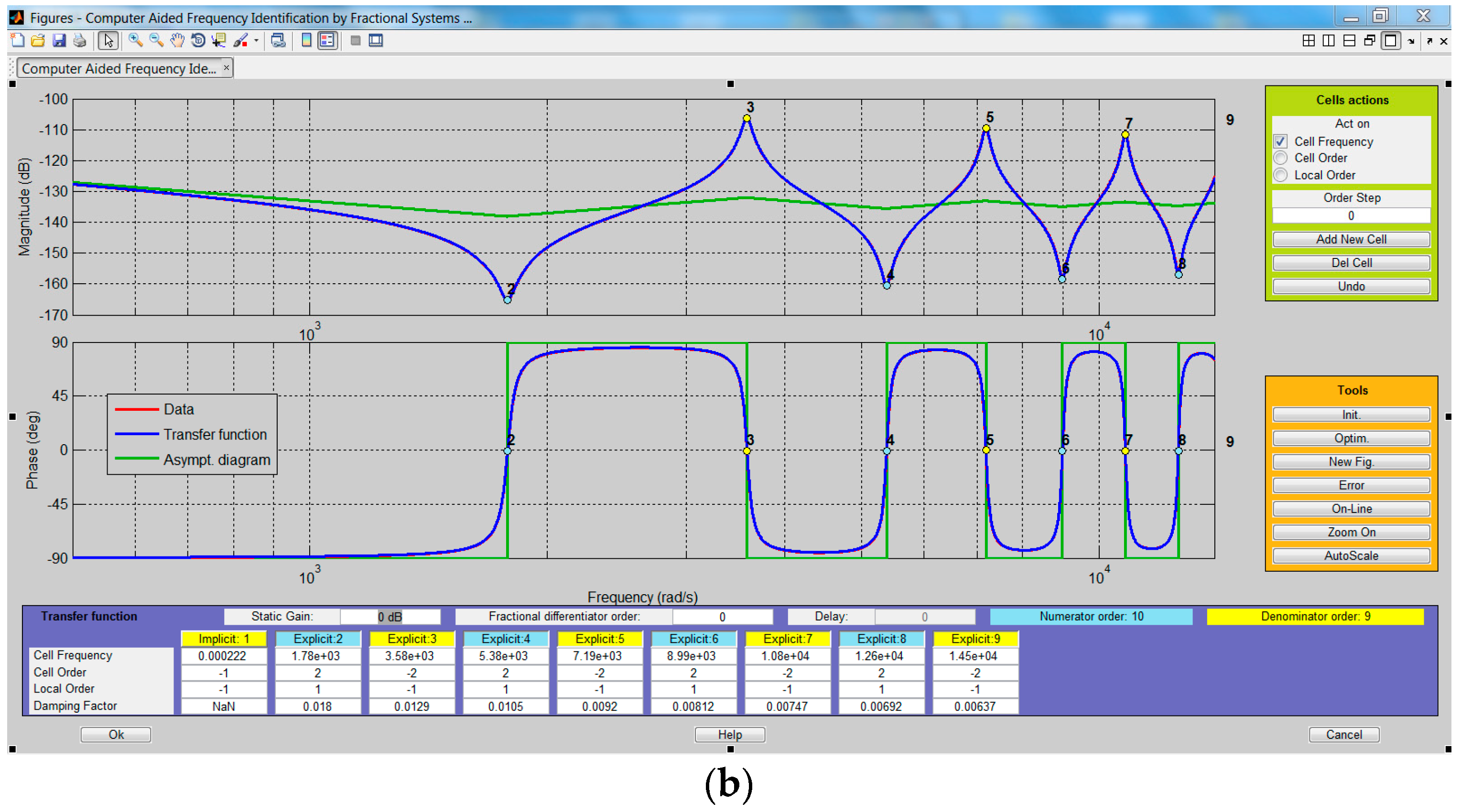
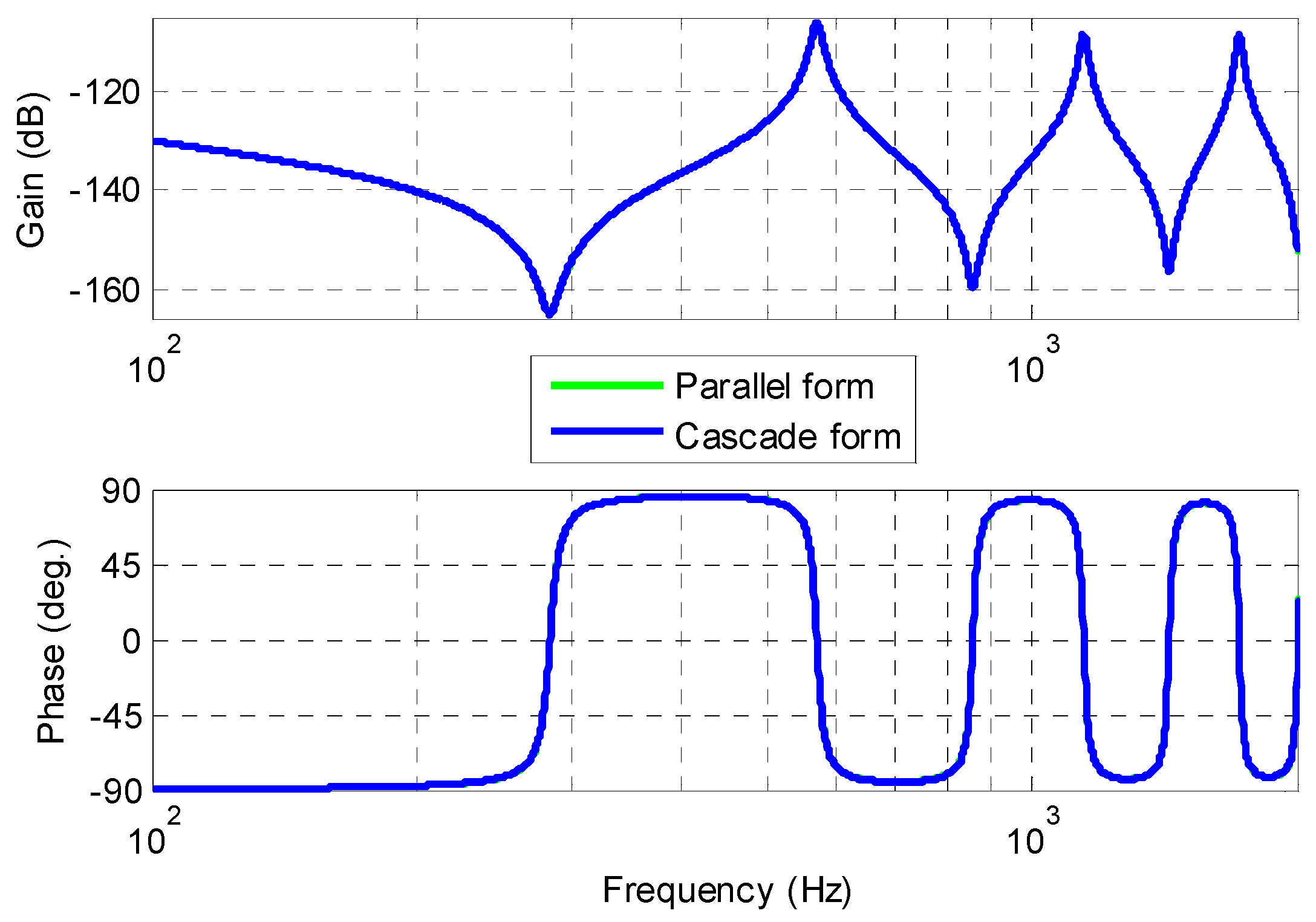
4. From the Simplified Fractional Model to its Rational Forms
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tassart, S. Modélisation, Simulation et Analyse des Instruments à Vent Avec Retards Fractionnaires. Ph.D. Thesis, Université Paris VI, Paris, France, 1999. [Google Scholar]
- Hélie, T. Modélisation physique d’instruments de musique en systèmes dynamiques et inversion. JESA 2003, 37, 1305–1310. [Google Scholar] [CrossRef]
- Hélie, T. Unidimensional models of acoustic propagation in axisymmetric wave guides. J. Acoust. Soc. Am. 2003, 114, 2633–2647. [Google Scholar] [CrossRef] [PubMed]
- Rémi, M.; Thomas, H.; Denis, M. Simulation en guides d’ondes numériques stables pour des tubes acoustiques à profil convexe. J. Eur. Syst. Autom. JESA 2011, 45, 547–574. [Google Scholar]
- Hélie, R.M.D.M.T. Waveguide modeling of lossy flared acoustic pipes: Derivation of Kelly-Lochbaum structure for real-time simulations. In Proceedings of the IEEE Workshop on Applications of Signal Processing to Audio and Acoustics, New Paltz, NY, USA, 21–24 October 2007. [Google Scholar]
- Mignot, R. Réalisation en Guides D’ondes Numériques Stables d’un Modèle Acoustique Réaliste Pour la Simulation en Temps réel D’instruments à Vent. Available online: https://pastel.archives-ouvertes.fr/tel-00456997v2/document (accessed on 19 January 2021).
- Hélie, T. Ondes découplées et ondes progressives pour les problèmes mono-dimensionnels d’acoustique linéaire. In Proceedings of the Congrès Français d’Acoustique, CFA’06, Tours, France, 24–27 April 2006. [Google Scholar]
- Lokshin, A.; Rok, V. Fundamental solutions of the wave equation with retarded time. Dokl. Akad. Nauk SSSR 1978, 239, 1305–1308. [Google Scholar]
- Haddar, H.; Matignon, D.; Hélie, T. A Webster-Lokshin Model for Waves with Viscothermal Losses and Impedance Boundary Conditions: Strong Solutions. Available online: https://link.springer.com/chapter/10.1007/978-3-642-55856-6_10 (accessed on 19 January 2021).
- Haddar, H.; Matignon, D. Analyse Théorique et Numérique du Modèle de Webster Lokshin; INRIA: Toulouse, France, 2008. [Google Scholar]
- Matignon, D.; d’Andréa-Novel, B.; Depalle, P.; Oustaloup, A. Viscothermal losses in wind instruments: A non-integer model. In Systems and Networks: Mathematical Theory and Applications; Helmke, U., Mennicken, R., Saurer, J., Eds.; Akademie Verlag: Berlin, Germany, 1994; Volume 79, pp. 789–790. [Google Scholar]
- Matignon, D. Représentation en Variables d’état de Modèles de Guides D’ondes Avec Dérivation Fractionnaire. Ph.D. Thesis, Paris XI University, Paris, France, November 1994. [Google Scholar]
- Haddar, H.; Li, J.; Matignon, D. Efficient solution of a wave equation with fractional-order dissipative terms. J. Comput. Appl. Math. 2010, 234, 2003–2010. [Google Scholar] [CrossRef]
- Mignot, R.; Hélie, T.; Matignon, D. Simulation en guides d’ondes numériques stables pour des tubes acoustiques à profil convexe. JESA 2011, 45, 547–574. [Google Scholar] [CrossRef] [Green Version]
- Lombard, B.; Matignon, D.; le Gorrec, Y. A fractional Burgers equation arising in nonlinear acoustics: Theory and numerics. In Proceedings of the 9eme Symposium IFAC sur les Systèmes de Commande Non Linéaires, Toulouse, France, 28 November 2013. [Google Scholar]
- Vigué, P.; Vergez, C.; Lombard, B.; Cochelin, B. Continuation of periodic solutions for systems with fractional derivatives. Nonlinear Dyn. 2019, 95, 479–493. [Google Scholar] [CrossRef] [Green Version]
- Haidar, G.A.; Daou, R.A.Z.; Moreau, X. Modelling and Identification of the Musicians Blowing Part and the Flute Musical Instrument. In Proceedings of the Fourth International Conference on Advances in Computational Tools for Engineering Applications, Zouk, Lebanon, 3–5 July 2019. [Google Scholar]
- Haidar, G.A.; Moreau, X.; Daou, R.A.Z. Modelling, Implementation and Control of a Wind Musical Instrument. In Proceedings of the 21st IFAC World Congress, Berlin, Germany, 2 October 2020. [Google Scholar]
- Haidar, G.A.; Moreau, X.; Daou, R.A.Z. System Approach for the Frequency Analysis of a Fractional Order Acoustic Tube: Application for the Resonator of the Flute Instrument. In Fractional Order Systems: Mathematics, Design, and Applications for Engineers; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Blanc, F. Production de son par Couplage Écoulement/Résonateur: Étude des Paramètres de Facture des Flûtes par Expérimentations et Simulations Numériques D’écoulements. Available online: https://tel.archives-ouvertes.fr/tel-00476600/document (accessed on 19 January 2021).
- Ducasse, E. Modélisation d’instruments de musique pour la synthèse sonore: Application aux instruments à vent. J. Phys. Colloq. 1990, 51, 837–840. [Google Scholar] [CrossRef]
- Ségoufin, C. Production du son par Interaction Écoulement/Résonateur Acoustique. Available online: http://www.lam.jussieu.fr/Publications/Theses/these-claire-segoufin.pdf (accessed on 19 January 2021).
- Ducasse, E. Modélisation et Simulation dans le Domaine Temporel D’instruments à vent à Anche Simple en Situation de jeu: Méthodes et Modèles. Available online: http://cyberdoc.univ-lemans.fr/theses/2001/2001LEMA1013.pdf (accessed on 19 January 2021).
- Terrien, S. Instrument de la Famille des Flûtes: Analyse des Transitions Entre Régimes. Available online: https://scanr.enseignementsup-recherche.gouv.fr/publication/these2014AIXM4756 (accessed on 19 January 2021).
- Beranek, L. Acoustics; Amer Inst of Physics: Woodbury, NY, USA, 1986. [Google Scholar]
- Chaigne, J.K.A. Acoustique des Instruments de Musique, 2nd ed.; Edition Belin: Paris, France, 2013. [Google Scholar]
- Boutin, H.; le Conte, S.; le Carrou, J.L.; Fabre, B. Modèle de Propagation Acoustique dans un Tuyau Cylindrique à Paroi Poreuse. Available online: https://hal.archives-ouvertes.fr/hal-01830275/ (accessed on 19 January 2021).
- Mignot, R.; Hélie, T.; Matignon, D. From a model of lossy frared pipes to a general framework for simulation of waveguides. Acta Acust. United Acust. 2011, 97, 477–491. [Google Scholar] [CrossRef]
- Hélie, T.; Gandolfi, G.; Hezard, T. Estimation paramétrique de la perce d’un instrument à vent à partir de la mesure de son impédance d’entrée. Available online: https://hal.archives-ouvertes.fr/hal-01106923 (accessed on 19 January 2021).
- Assaf, R. Modélisation des Phénomènes de Diffusion Thermique dans un Milieu fini Homogène en vue de L’analyse, de la Synthèse et de la Validation de Commandes Robustes. Available online: https://hal.archives-ouvertes.fr/tel-01247918 (accessed on 19 January 2021).
- Debut, V. Deux études d’un Instrument de Musique de type Clarinette: Analyse des Fréquences Propres du Résonateur et Calcul des Auto-Oscillations par Décomposition Modale. Ph.D. Thesis, Université Aix-Marseille II, Marseille, France, 2004. [Google Scholar]
- Malti, S.V.R. CRONE Toolbox for system identification using fractional differentiation models. In Proceedings of the 17th IFAC Symposum on System Identification, SYSID’15, Beijing, China, 19–21 October 2015; pp. 769–774. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ta (°C) | −10 | −5 | 0 | 5 | 10 | 15 | 20 | 25 | 30 |
|---|---|---|---|---|---|---|---|---|---|
| ca (m/s) | 325.4 | 328.5 | 331.5 | 334.5 | 337.5 | 340.5 | 343.4 | 346.3 | 349.2 |
| ra (kg/m3) | 1.341 | 1.316 | 1.293 | 1.269 | 1.247 | 1.225 | 1.204 | 1.184 | 1.164 |
| Zac (Pa s/m) | 436.5 | 432.4 | 428.3 | 424.5 | 420.7 | 417 | 413.5 | 410 | 406.6 |
| N | wzi (rad/s) | zzi | Qzi | wpi (rad/s) | zpi | Qpi |
|---|---|---|---|---|---|---|
| 1 | 1780 | 18 × 10−3 | 27.78 | 3580 | 12.9 × 10−3 | 38.76 |
| 2 | 5380 | 10.5 × 10−3 | 47.62 | 7190 | 9.2 × 10−3 | 54.35 |
| 3 | 8990 | 8.12 × 10−3 | 61.8 | 10,800 | 7.47 × 10−3 | 66.93 |
| 4 | 12,600 | 6.92 × 10−3 | 72.25 | 14,500 | 6.37 × 10−3 | 78.5 |
| N | Ai | Bi | wpi (rad/s) | zpi | Qpi |
|---|---|---|---|---|---|
| 1 | 36.02 × 10−12 | 16.63 × 10−10 | 3580 | 12.9 × 10−3 | 38.76 |
| 2 | 98.24 × 10−13 | 64.99 × 10−11 | 7190 | 9.2 × 10−3 | 54.35 |
| 3 | 53.38 × 10−13 | 43.07 × 10−11 | 10,800 | 7.47 × 10−3 | 66.93 |
| 4 | 58.98 × 10−13 | 54.47 × 10−11 | 14,500 | 6.37 × 10−3 | 78.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abou Haidar, G.; Moreau, X.; Abi Zeid Daou, R. Analysis of the Effects of the Viscous Thermal Losses in the Flute Musical Instruments. Fractal Fract. 2021, 5, 11. https://doi.org/10.3390/fractalfract5010011
Abou Haidar G, Moreau X, Abi Zeid Daou R. Analysis of the Effects of the Viscous Thermal Losses in the Flute Musical Instruments. Fractal and Fractional. 2021; 5(1):11. https://doi.org/10.3390/fractalfract5010011
Chicago/Turabian StyleAbou Haidar, Gaby, Xavier Moreau, and Roy Abi Zeid Daou. 2021. "Analysis of the Effects of the Viscous Thermal Losses in the Flute Musical Instruments" Fractal and Fractional 5, no. 1: 11. https://doi.org/10.3390/fractalfract5010011
APA StyleAbou Haidar, G., Moreau, X., & Abi Zeid Daou, R. (2021). Analysis of the Effects of the Viscous Thermal Losses in the Flute Musical Instruments. Fractal and Fractional, 5(1), 11. https://doi.org/10.3390/fractalfract5010011