Numerical Analysis of Viscoelastic Rotating Beam with Variable Fractional Order Model Using Shifted Bernstein–Legendre Polynomial Collocation Algorithm



Abstract
:1. Introduction
2. Mathematical Preliminaries
2.1. Variable Fractional Differential Operators
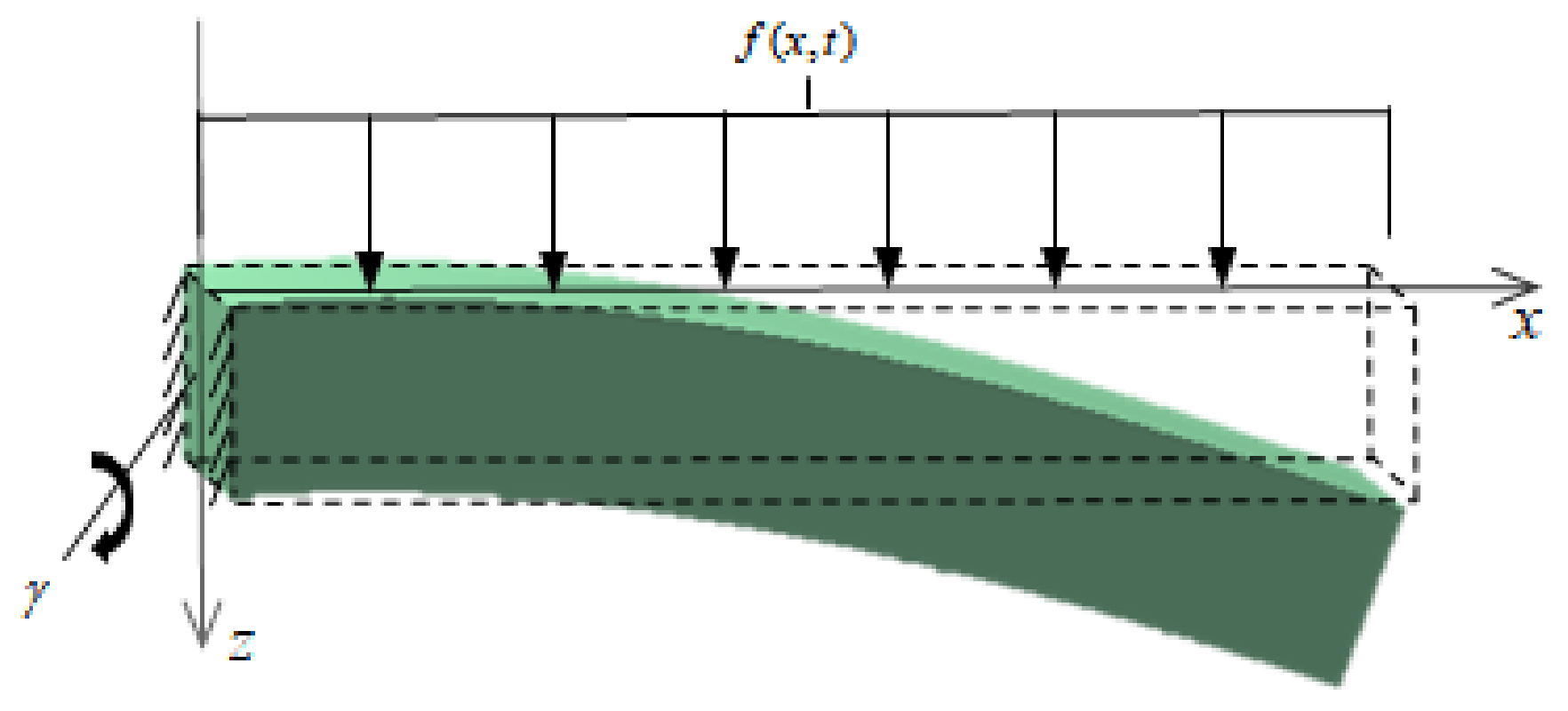
2.2. Establishment of Governing Equation with the Variable Fractional Viscoelastic Model
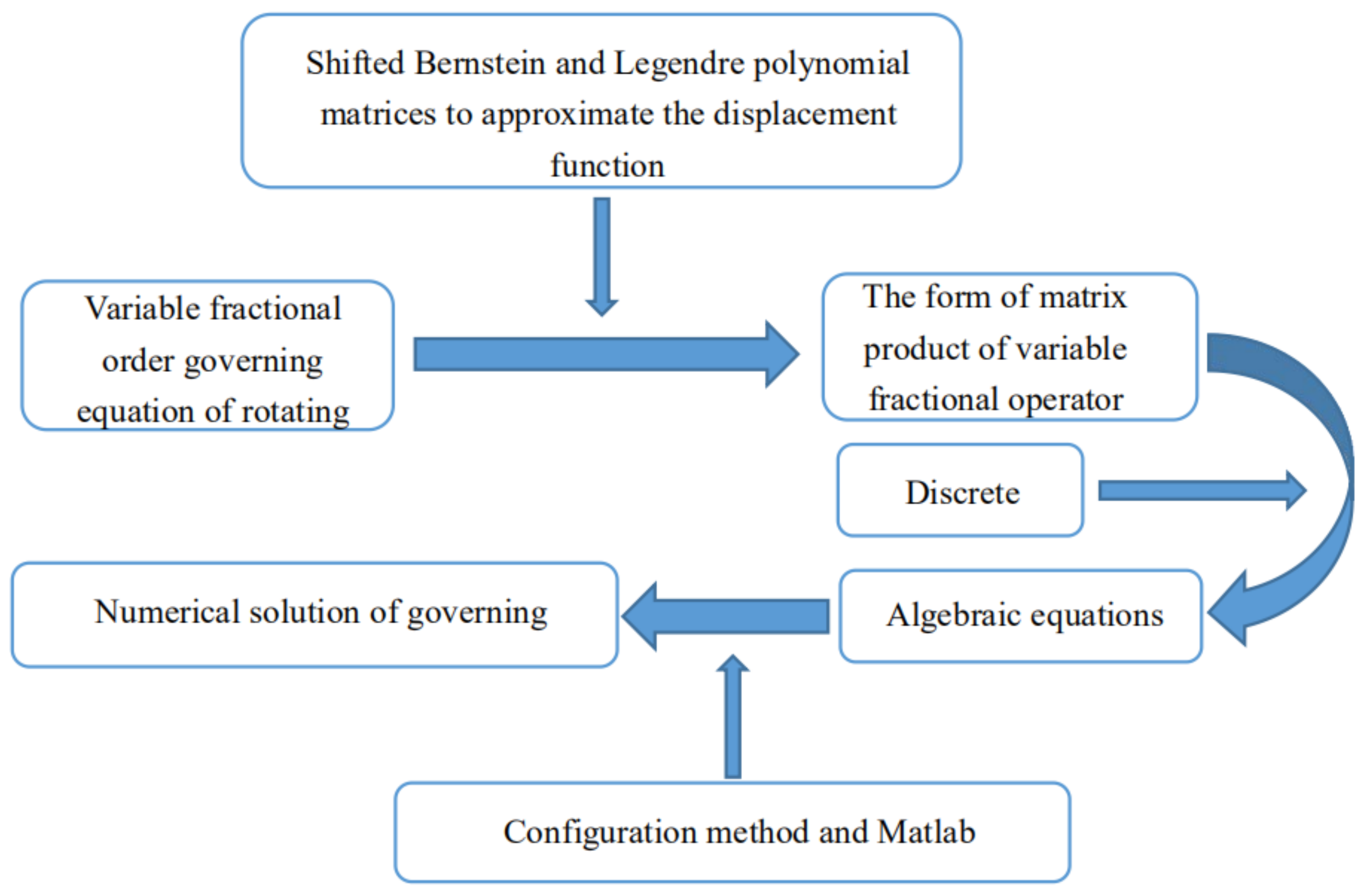
3. Shifted Bernstein–Legendre Polynomial Collocation Algorithm
3.1. Shifted Bernstein–Legendre polynomial
3.2. Function Approximation
3.3. Integer-Order Differential Operator Matrix
3.4. Variable Fractional Differential Operator Matrix
4. Numerical Results and Analysis
5. Conclusions
- (1)
- The governing equation of viscoelastic rotating beams is established by variable fractional constitutive model.
- (2)
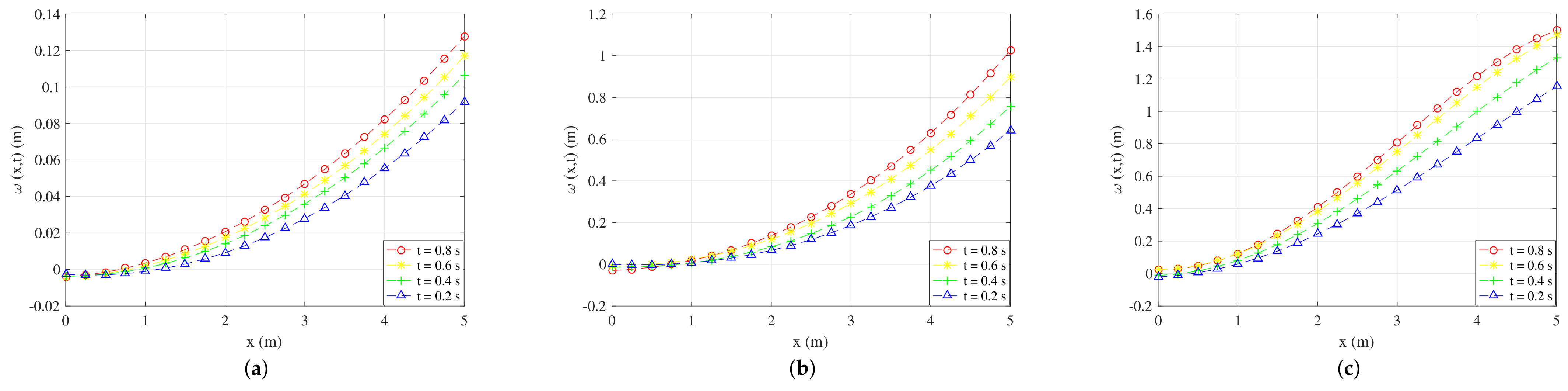
- The displacement of the rotating beam increases with time under uniform load, linear load and simple harmonic load.
- (3)
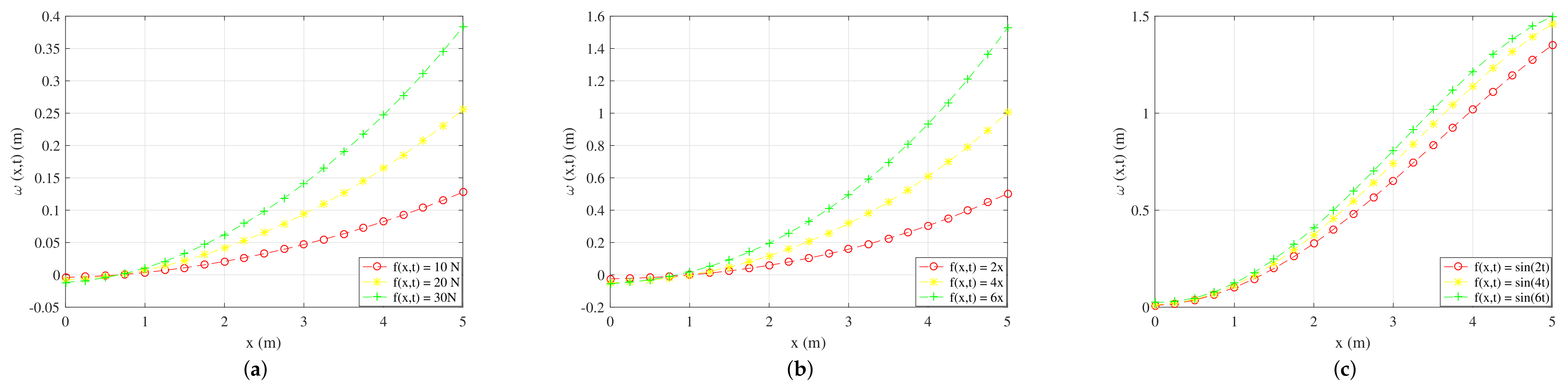
- The displacements of rotating beams show an increasing trend with the increase of uniform load, linear load slope and simple harmonic load frequency.
- (4)
- The displacement of the PET beam is smaller than that of the polyurea beam, which theoretically verifies that PTE has better bending resistance than polyurea materials.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Roland, C.M.; Twigg, J.N.; Vu, Y.; Mott, P.H. High strain rate mechanical behavior of polyurea. Polymer 2007, 48, 574–578. [Google Scholar] [CrossRef]
- Khajehsaeid, H.; Arghavani, J.; Naghdabadi, R.; Sohrabpour, S. A visco-hyperelastic constitutive model for rubber-like materials: A rate-dependent relaxation time scheme. Int. J. Eng. Sci. 2014, 79, 44–58. [Google Scholar] [CrossRef]
- Boyce, M.C.; Socrate, S.; Llana, P.G. Constitutive model for the finite deformation stress–strain behavior of poly (ethylene terephthalate) above the glass transition. Polymer 2000, 41, 2183–2201. [Google Scholar] [CrossRef]
- Alotta, G.; Paola, M.D.; Failla, G.; Pinnola, F.P. On the dynamics of non-local fractional viscoelastic beams under stochastic agencies. Compos. Part B Eng. 2018, 137, 102–110. [Google Scholar] [CrossRef]
- Failla, G.; Zingales, M. Advanced materials modelling via fractional calculus: Challenges and perspectives. Philos. Trans. R. Soc. A 2020, 378, 20200050. [Google Scholar] [CrossRef] [PubMed]
- Patnaik, S.; Hollkamp, J.P.; Semperlotti, F. Applications of variable-order fractional operators: A review. Proc. R. Soc. A 2019, 476, 20190498. [Google Scholar] [CrossRef] [Green Version]
- Meng, R.F.; Yin, D.; Drapaca, C.S. A variable order fractional constitutive model of the viscoelastic behavior of polymers. Int. J. Non-Linear Mech. 2019, 113, 171–177. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Variable order and distributed order fractional operators. Nonlinear. Dynam. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Coimbra, C.F.M. Mechanics with variable-order differential operators. Ann. Phys. 2003, 12, 692–703. [Google Scholar] [CrossRef]
- Sun, H.G.; Chen, W.; Wei, H.; Chen, Y.Q. A comparative study of constant-order and variable-order fractional models in characterizing memory property of systems. Eur. Phys. J. Spec. Top. 2011, 193, 185–192. [Google Scholar] [CrossRef]
- Meng, R.F.; Yin, D.; Drapaca, C.S. Variable-order fractional description of compression deformation of amorphous glassy polymers. Comput. Mech. 2019, 64, 163–171. [Google Scholar] [CrossRef]
- Wang, Y.H.; Chen, Y.M. Dynamic analysis of the viscoelastic pipeline conveying fluid with an improved variable fractional order model based on shifted Legendre polynomials. Fractal Fract. 2019, 3, 52. [Google Scholar] [CrossRef] [Green Version]
- Lewandowski, R.; Wielentejczyk, P. Nonlinear vibration of viscoelastic beams described using fractional order derivatives. J. Sound Vib. 2017, 399, 228–243. [Google Scholar] [CrossRef]
- Lewandowski, R.; Baum, M. Dynamic characteristics of multilayered beams with viscoelastic layers described by the fractional Zener model. Arch. Appl. Mech. 2015, 85, 1793–1814. [Google Scholar] [CrossRef]
- Fernando, C.; María, J.E. Finite element formulations for transient dynamic analysis in structural systems with viscoelastic treatments containing fractional derivative models. Int. J. Numer. Method Eng. 2007, 69, 2173–2195. [Google Scholar]
- Wang, L.P.; Chen, Y.M.; Liu, D.Y.; Boutat, D. Numerical algorithm to solve generalized fractional pantograph equations with variable coefficients based on shifted Chebyshev polynomials. Int. J. Comput. Math. 2019, 96, 2487–2510. [Google Scholar] [CrossRef]
- Samaneh, S.Z.; Hadi, J.S.; Amin, Y.F.; Stelios, B. King algorithm: A novel optimization approach based on variable-order fractional calculus with application in chaotic financial systems. Chaos Solitons Fractals 2020, 132, 109569. [Google Scholar]
- Hassani, H.; Machadob, J.A.T.; Naraghirad, E. An efficient numerical technique for variable order time fractional nonlinear Klein-Gordon equation. Appl. Numer. Math. 2020, 154, 260–272. [Google Scholar] [CrossRef]
- Paola, M.D.; Alotta, G.; Burlon, A.; Failla, G. A novel approach to nonlinear variable-order fractional viscoelasticity. Philos. Trans. R. Soc. A 2019, 378, 20190296. [Google Scholar] [CrossRef]
- Rostamy, D.; Jafari, H.; Alipour, M.; Khalique, C.M. Computational method based on Bernstein operational matrices for multi-order fractional differential equations. Filomat 2014, 28, 591–601. [Google Scholar] [CrossRef] [Green Version]
- Maleknejad, K.; Hashemizadeh, E.; Basirat, B. Computational method based on Bernstein operational matrices for nonlinear Volterra-Fredholm-Hammerstein integral equations. Commun. Nonlinear Sci. 2012, 17, 52–61. [Google Scholar] [CrossRef]
- Huang, Y.X.; Zhao, Y.; Wang, T.S.; Tian, H. A new Chebyshev spectral approach for vibration of in-plane functionally graded Mindlin plates with variable thickness. Appl. Math. Model. 2019, 74, 21–42. [Google Scholar] [CrossRef]
- Ren, Q.W.; Tian, H.J. Numerical solution of the static beam problem by Bernoulli collocation method. Appl. Math. Model. 2016, 40, 8886–8897. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.W.; Chen, Y.M.; Wang, Y.H.; Cheng, G.; Barrière, T. Shifted Legendre polynomials algorithm used for the dynamic analysis of PMMA viscoelastic beam with an improved fractional model. Chaos Solitons Fractals 2020, 141, 110342. [Google Scholar] [CrossRef]
- Feng, Y.J.; Chen, Y.M.; Cheng, G.; Barrière, T. Numerical analysis of fractional-order variable section cantilever beams. ICIC Express Lett. 2010, 4, 5. [Google Scholar]
- Malmir, I. A new fractional integration operational matrix of Chebyshev wavelets in fractional delay systems. Fractal Fract. 2019, 3, 46. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.M.; Liu, L.Q.; Liu, D.Y.; Boutat, D. Numerical study of a class of variable order nonlinear fractional differential equation in terms of Bernstein polynomials. Ain Shams Eng. J. 2018, 9, 1235–1241. [Google Scholar] [CrossRef] [Green Version]
- Samko, S.G. Fractional integration and differentiation of variable order. Anal. Math. 1995, 21, 213–236. [Google Scholar] [CrossRef]
- Chen, Y.M.; Liu, L.Q.; Li, B.F.; Sun, Y.N. Numerical solution for the variable order linear cable equation with Bernstein polynomials. Appl. Math. Comput. 2014, 238, 329–341. [Google Scholar] [CrossRef]
- Wang, Y.H.; Chen, Y.M. Shifted Legendre polynomials algorithm used for the dynamic analysis of viscoelastic pipes conveying fluid with variable fractional order model. Appl. Math. Model. 2020, 81, 159–176. [Google Scholar] [CrossRef]
- Mirzaee, F.; Samadyar, N. Application of orthonormal Bernstein polynomials to construct a efficient scheme for solving fractional stochastic integro-differential equation. Optik 2017, 132, 262–273. [Google Scholar] [CrossRef]
- Khataybeh, S.N.; Hashim, I.; Alshbool, M. Solving directly third-order ODEs using operational matrices of Bernstein polynomials method with applications to fluid flow equations. J. King. Saud. Univ. Sci. 2019, 31, 822–826. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, Y.M.; Zhao, J.J. Error analysis of the Legendre-Gauss collocation methods for the nonlinear distributed-order fractional differential equation. Appl. Numer. Math. 2019, 142, 122–138. [Google Scholar] [CrossRef]
- Sakar, M.J.; Saldır, O. A new reproducing kernel approach for nonlinear fractional three-point boundary value problems. Fractal Fract. 2020, 4, 53. [Google Scholar] [CrossRef]
- Wang, L.; Chen, Y.M. Shifted-Chebyshev-polynomial-based numerical algorithm for fractional order polymer visco-elastic rotating beam. Chaos Solitons Fractals 2020, 132, 109585. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam | E | |||
|---|---|---|---|---|
| polyurea | ||||
| PET |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.; Chen, Y.; Liu, D.-Y.; Boutat, D. Numerical Analysis of Viscoelastic Rotating Beam with Variable Fractional Order Model Using Shifted Bernstein–Legendre Polynomial Collocation Algorithm. Fractal Fract. 2021, 5, 8. https://doi.org/10.3390/fractalfract5010008
Han C, Chen Y, Liu D-Y, Boutat D. Numerical Analysis of Viscoelastic Rotating Beam with Variable Fractional Order Model Using Shifted Bernstein–Legendre Polynomial Collocation Algorithm. Fractal and Fractional. 2021; 5(1):8. https://doi.org/10.3390/fractalfract5010008
Chicago/Turabian StyleHan, Cundi, Yiming Chen, Da-Yan Liu, and Driss Boutat. 2021. "Numerical Analysis of Viscoelastic Rotating Beam with Variable Fractional Order Model Using Shifted Bernstein–Legendre Polynomial Collocation Algorithm" Fractal and Fractional 5, no. 1: 8. https://doi.org/10.3390/fractalfract5010008
APA StyleHan, C., Chen, Y., Liu, D. -Y., & Boutat, D. (2021). Numerical Analysis of Viscoelastic Rotating Beam with Variable Fractional Order Model Using Shifted Bernstein–Legendre Polynomial Collocation Algorithm. Fractal and Fractional, 5(1), 8. https://doi.org/10.3390/fractalfract5010008