
A Chebyshev Collocation Approach to Solve Fractional Fisher–Kolmogorov–Petrovskii–Piskunov Equation with Nonlocal Condition

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Preliminaries
3. Numerical Method
| Algorithm 1: Algorithm of presented method in Section 3 |
| Input: and , and functions F, and . |
| Step 1: Compute the shifted sixth-kind Chebyshev polynomials on the interval and on the interval . |
| Step 2: Compute the vector of shifted sixth-kind Chebyshev polynomials and from Equations (9) and (10). |
| Step 3: Compute the vectors from (12) and , from Equations (14) and (15). |
| Step 4: Compute the collocation points and . |
| Step 5: Compute the collocation points and . |
| Step 10: Solve the nonlinear system (21)–(24) and obtain the unknown vector . |
| Step 12.4: Let . |
| Step 13: Post-processing the results. |
| Output: The approximate solution: . |
4. Convergence Analysis
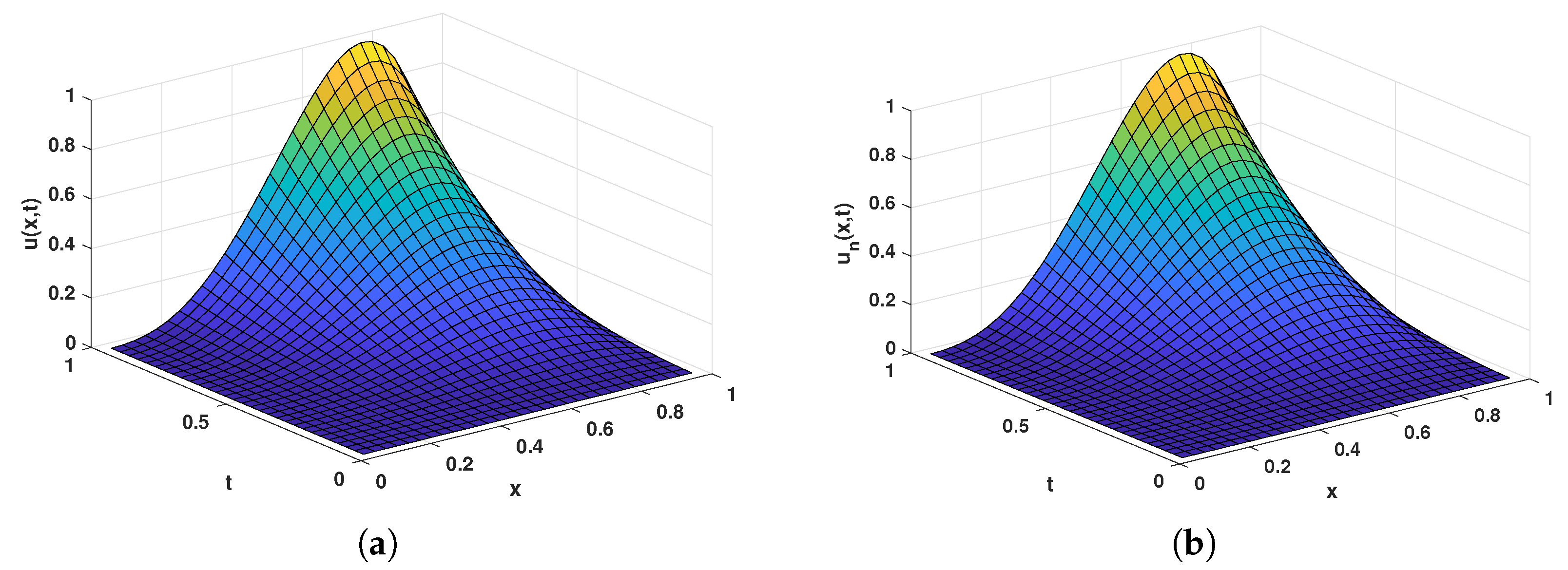
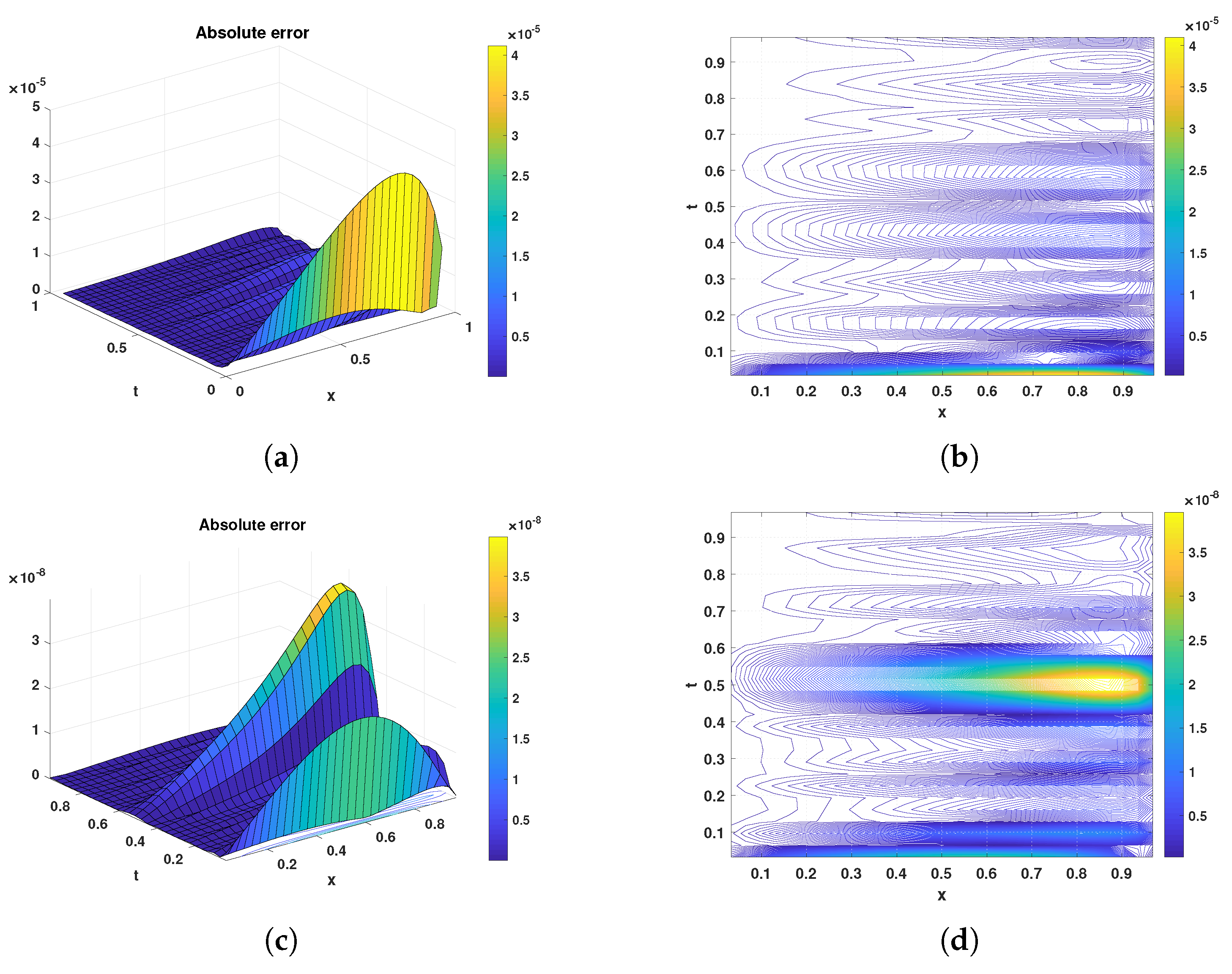
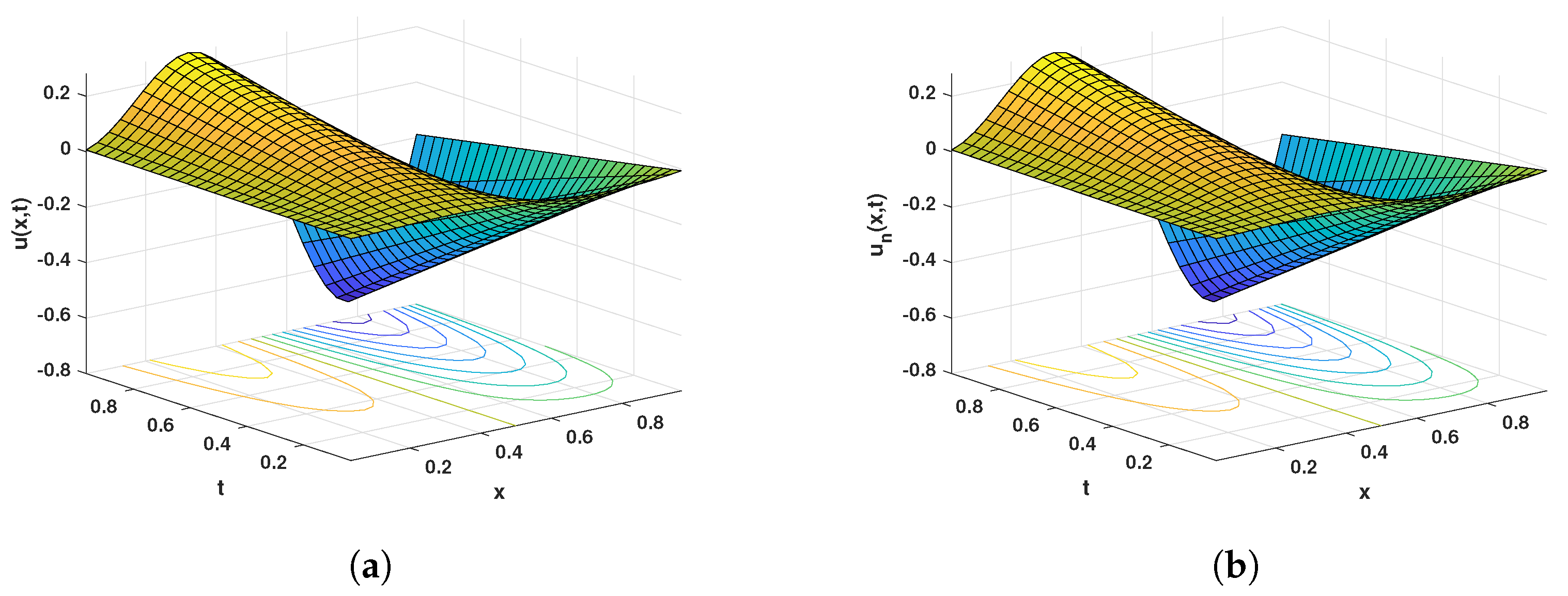
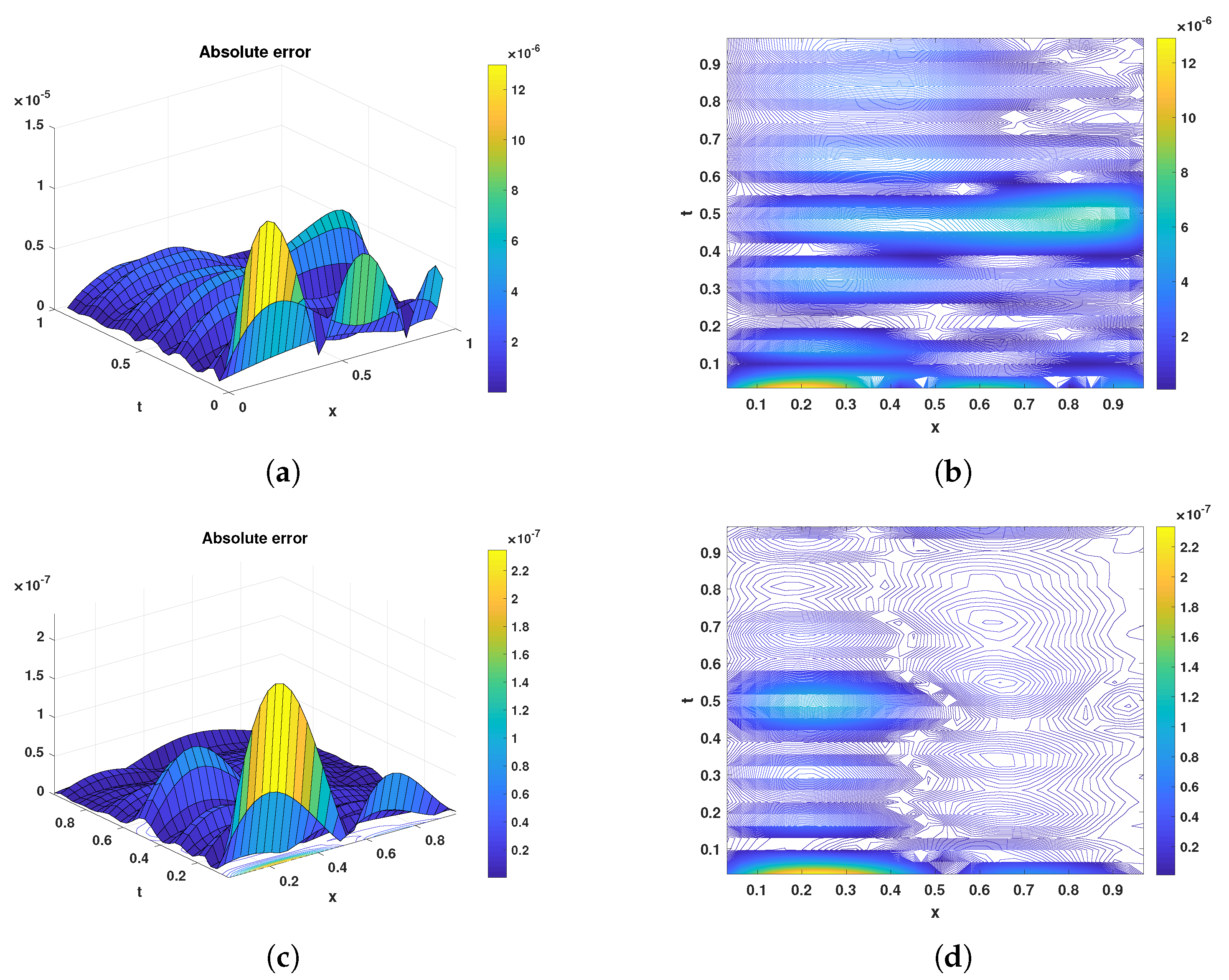
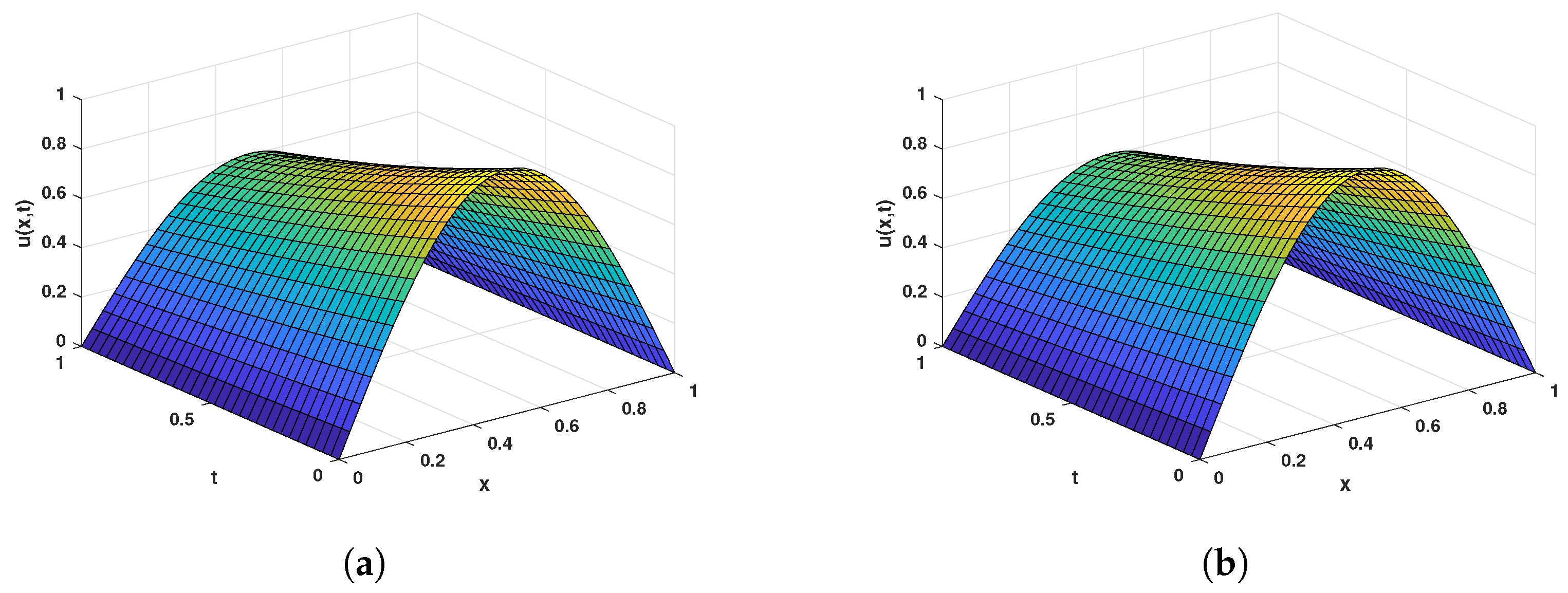
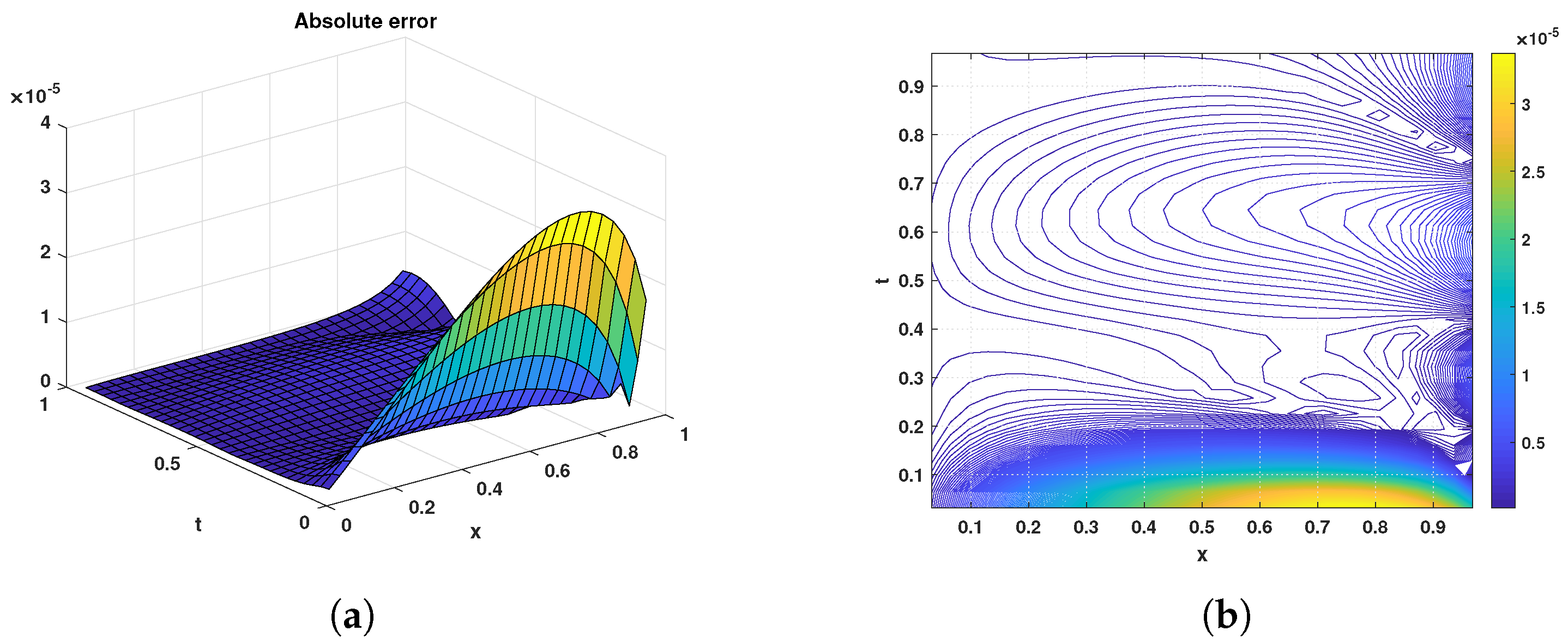
5. Numerical Example
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Baeumer, B.; Benson, D.Z.; Meerschaert, M.M.; Wheatcraft, S.W. Subordinated advection-dispersion equation for contaminant transport. Water Resour. Res. 2001, 37, 1543–1550. [Google Scholar] [CrossRef]
- Mainardi, F.; Raberto, M.; Gorenelo, R.; Scalas, E. Fractional calculus and continuous-time finance II: The waiting-time discribution. Phys. A Stat. Mech. Its Appl. 2000, 287, 468–481. [Google Scholar] [CrossRef] [Green Version]
- Javidi, M.; Ahmad, B. Numerical solution of fractional partial differential equations by numerical Laplace inversion technique. Adv. Differ. Equ. 2013, 2013, 375. [Google Scholar] [CrossRef] [Green Version]
- Oldham, K.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Srivastava, H.M. Some parametric and argument variations of the operators of fractional calculus and related special functions and integral transformations. J. Nonlinear Convex Anal. 2021, 22, 1501–1520. [Google Scholar]
- Hosseini, V.R.; Shivanian, E.; Chen, W. Local integration of 2-D fractional telegraph equation via local radial point interpolant approximation. Eur. Phys. J. Plus 2015, 130, 1–21. [Google Scholar] [CrossRef]
- Esmaeelzade Aghdam, Y.; Safdari, H.; Azari, Y.; Jafari, H.; Baleanu, D. Numerical investigation of space fractional order diffusion equation by the Chebyshev collocation method of the fourth kind and compact finite difference scheme. Discret. Contin. Dyn. Syst.-S 2021, 14, 2025–2039. [Google Scholar]
- Ali, I.; Haq, S.; Nisar, K.S.; Baleanu, D. An efficient numerical scheme based on Lucas polynomials for the study of multidimensional Burgers-type equations. Adv. Differ. Equ. 2021, 1, 1–24. [Google Scholar] [CrossRef]
- Hosseini, V.R.; Yousefi, F.; Zou, W.N. The numerical solution of high dimensional variable-order time fractional diffusion equation via the singular boundary method. J. Adv. Res. 2020, 32, 73–84. [Google Scholar] [CrossRef]
- Abdelkawy, M.A.; Amin, A.Z.; Babatin, M.M.; Alnahdi, A.S.; Zaky, M.A.; Hafez, R.M. Jacobi spectral collocation technique for time-fractional inverse heat equations. Fractal Fract. 2021, 5, 115. [Google Scholar]
- Nikan, O.; Avazzadeh, Z.; Tenreiro Machado, J.A. Numerical investigation of fractional nonlinear sine-Gordon and Klein-Gordon models arising in relativistic quantum mechanics. Eng. Anal. Bound. Elem. 2020, 120, 223–237. [Google Scholar] [CrossRef]
- Babaei, A.; Jafari, H.; Banihashemi, S. A Collocation Approach for Solving Time-Fractional Stochastic Heat Equation Driven by an Additive Noise. Symmetry 2020, 12, 904. [Google Scholar] [CrossRef]
- Zhang, X.; Yao, L. Numerical approximation of time-dependent fractional convection-diffusion-wave equation by RBF-FD method. Eng. Anal. Bound. Elem. 2021, 130, 1–9. [Google Scholar] [CrossRef]
- Qiao, H.; Cheng, A. A fast finite difference/RBF meshless approach for time fractional convection-diffusion equation with non-smooth solution. Eng. Anal. Bound. Elem. 2021, 125, 280–289. [Google Scholar] [CrossRef]
- Zaky, M.A.; Abdelkawy, M.A.; Ezz-Eldien, S.S.; Doha, E.H. Pseudospectral methods for the Riesz space-fractional Schrödinger equation. In Fractional-Order Modeling of Dynamic Systems with Applications in Optimization; Signal Processing and Control; Academic Press: Cambridge, MA, USA, 2022; pp. 323–353. [Google Scholar]
- Branco, J.R.; Ferreira, J.A.; de Oliveira, P. Numerical methods for the generalized Fisher-Kolomogrov-Petrovskii-Piskunov equation. Appl. Numer. Math. 2007, 57, 89–102. [Google Scholar] [CrossRef]
- Khuri, S.A.; Sayfy, A. A numerical approach for solving an extended Fisher-Kolomogrov-Petrovskii-Piskunov equation. J. Comput. Appl. Math. 2010, 233, 2081–2089. [Google Scholar] [CrossRef] [Green Version]
- Machado, J.A.; Babaei, A.; Moghaddam, B.P. Highly accurate scheme for the Cauchy problem of the generalized Burgers-Huxley equation. Acta. Polytech. Hung. 2016, 13, 183–195. [Google Scholar]
- Veeresha, P.; Prakasha, D.G.; Baleanu, D. An efficient numerical technique for the nonlinear fractional Kolmogorov-Petrovskii-Piskunov equation. Mathematics 2019, 7, 265. [Google Scholar] [CrossRef] [Green Version]
- Podlubny, I. Fractional-order systems and PI/sup/spl lambda//D/sup/spl mull-Controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Leclerc, Q.J.; Lindsay, J.A.; Knight, G.M. Mathematical modelling to study the horizontal transfer of antimicrobial resistance genes in bacteria: Current state of the field and recommendations. J. R. Soc. Interface 2019, 16, 20190260. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khater, M.M.; Attia, R.A.; Abdel-Aty, A.H.; Alharbi, W.; Lu, D. Abundant analytical and numerical solutions of the fractional microbiological densities model in bacteria cell as a result of diffusion mechanisms. Chaos Solitons Fractals 2020, 136, 109824. [Google Scholar] [CrossRef]
- Araújo, A.; Branco, R.; Ferreira, J.A. On the stability of a class of splitting methods for integro-differential equations. Appl. Numer. Math. 2009, 59, 436–453. [Google Scholar] [CrossRef] [Green Version]
- Araújo, A.; Ferreira, J.A.; de Oliveira, P. Qualitative solutions for reaction-diffusion equations with memory. Appl. Anal. 2005, 84, 1231–1246. [Google Scholar] [CrossRef] [Green Version]
- Araújo, A.; Ferreira, J.A.; de Oliveira, P. The effect of memory terms in diffusion phenomena. J. Comput. Math. 2006, 24, 91–102. [Google Scholar]
- Barbeiro, S.; Ferreira, J.A. Integro-differential models for percutaneous drug absortion. Int. J. Comput. Math. 2007, 84, 451–467. [Google Scholar] [CrossRef] [Green Version]
- Babaei, A.; Jafari, H.; Banihashemi, S. Numerical solution of variable order fractional nonlinear quadratic integro-differential equations based on the sixth-kind Chebyshev collocation method. J. Comput. Appl. Math. 2020, 377, 112908. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. Fifth-kind orthonormal Chebyshev polynomial solutions for fractional differential equations. Comput. Appl. Math. 2018, 37, 2897–2921. [Google Scholar] [CrossRef]
- Abd-Elhameed, W.M.; Youssri, Y.H. Sixth-kind Chebyshev spectral approach for solving fractional differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2019, 20, 191–203. [Google Scholar] [CrossRef]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods in Fluid Dynamics; Springer: New York, NY, USA, 1988. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CO | CO | CPU-Time | |||
|---|---|---|---|---|---|
| 3 | – | – | |||
| 6 | |||||
| 9 | |||||
| 12 | |||||
| CO | CO | CPU-Time | |||
|---|---|---|---|---|---|
| 3 | |||||
| 6 | |||||
| 9 | |||||
| 12 | |||||
| B-Spline Method [17] | Proposed Method | |||
|---|---|---|---|---|
| CPU-Time | ||||
| 20 | 3 | |||
| 30 | 6 | |||
| 40 | 9 | |||
| 50 | 12 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, D.; Babaei, A.; Banihashemi, S.; Jafari, H.; Alzabut, J.; Moshokoa, S.P. A Chebyshev Collocation Approach to Solve Fractional Fisher–Kolmogorov–Petrovskii–Piskunov Equation with Nonlocal Condition. Fractal Fract. 2022, 6, 160. https://doi.org/10.3390/fractalfract6030160
Zhou D, Babaei A, Banihashemi S, Jafari H, Alzabut J, Moshokoa SP. A Chebyshev Collocation Approach to Solve Fractional Fisher–Kolmogorov–Petrovskii–Piskunov Equation with Nonlocal Condition. Fractal and Fractional. 2022; 6(3):160. https://doi.org/10.3390/fractalfract6030160
Chicago/Turabian StyleZhou, Dapeng, Afshin Babaei, Seddigheh Banihashemi, Hossein Jafari, Jehad Alzabut, and Seithuti P. Moshokoa. 2022. "A Chebyshev Collocation Approach to Solve Fractional Fisher–Kolmogorov–Petrovskii–Piskunov Equation with Nonlocal Condition" Fractal and Fractional 6, no. 3: 160. https://doi.org/10.3390/fractalfract6030160
APA StyleZhou, D., Babaei, A., Banihashemi, S., Jafari, H., Alzabut, J., & Moshokoa, S. P. (2022). A Chebyshev Collocation Approach to Solve Fractional Fisher–Kolmogorov–Petrovskii–Piskunov Equation with Nonlocal Condition. Fractal and Fractional, 6(3), 160. https://doi.org/10.3390/fractalfract6030160