
Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor


Abstract
:1. Introduction
2. The New System and Its Dynamic Characteristics
3. Chaotic and Complex Dynamics in New System
3.1. Fix and Vary b
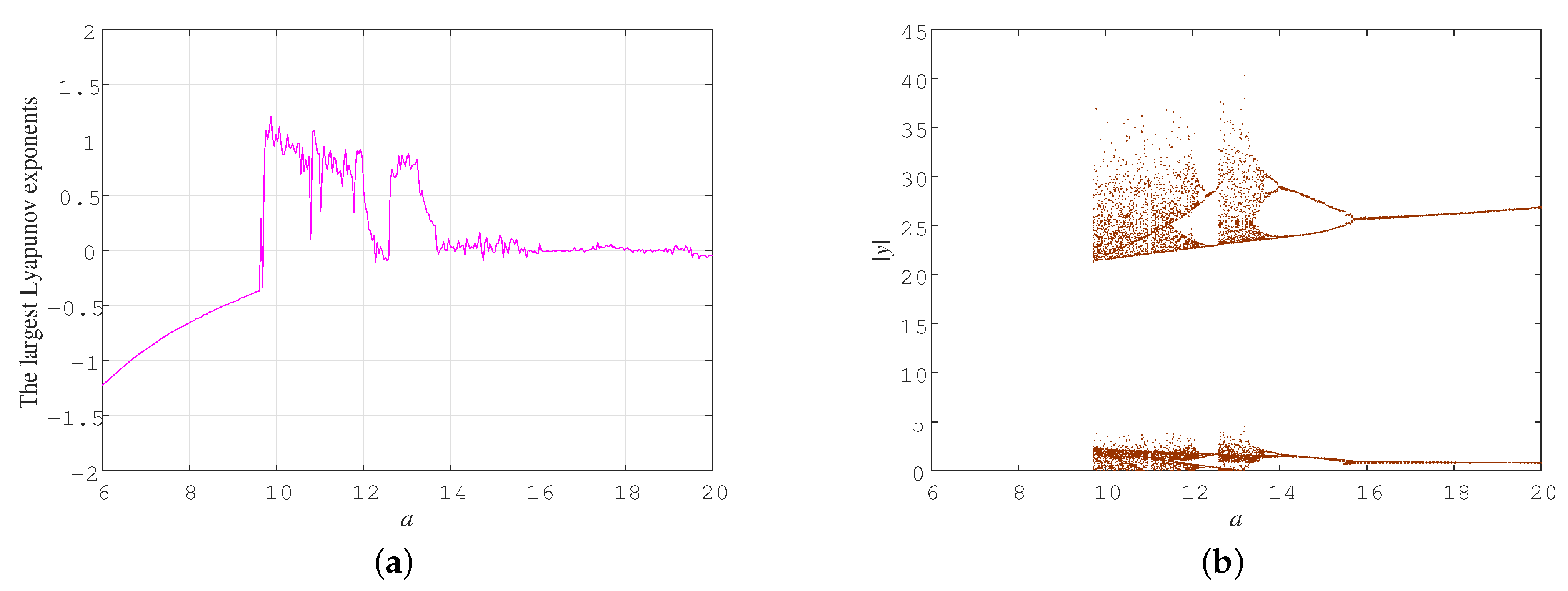
3.2. Fix and Vary a
3.3. Fix and Vary c
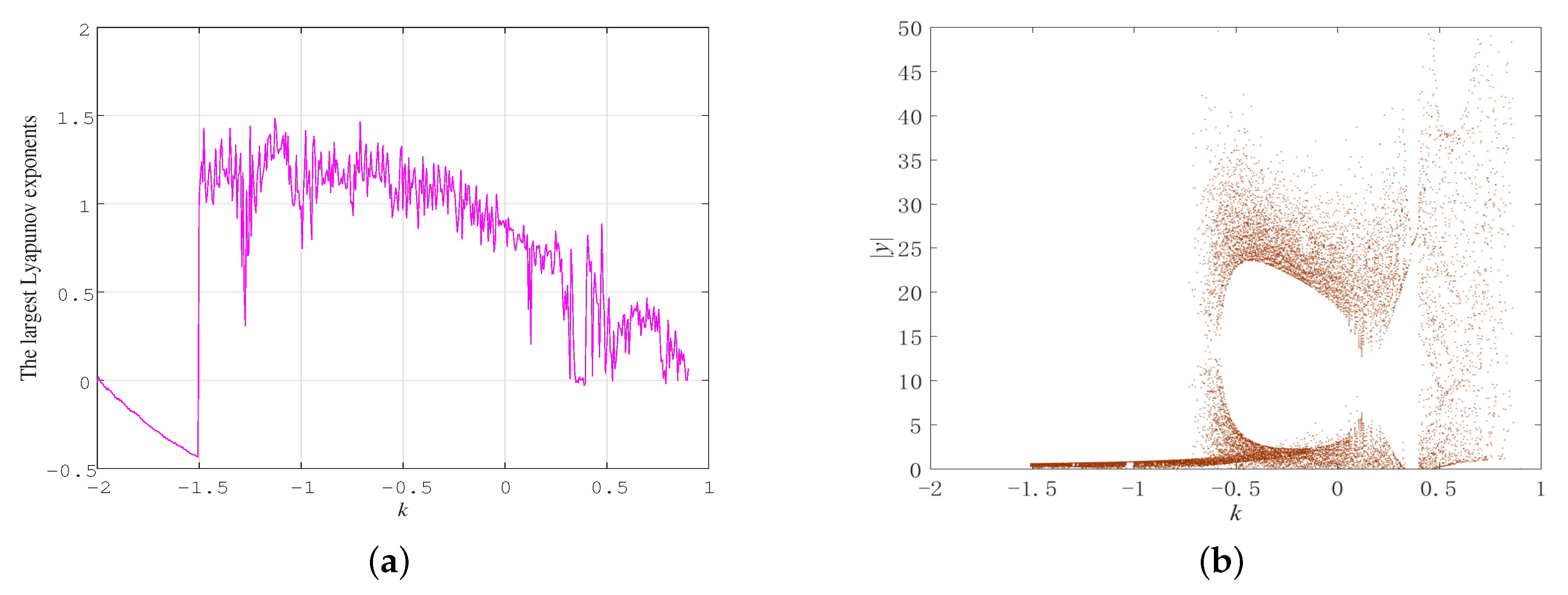
3.4. Fix and Vary k
3.5. Fix and Vary k and c
4. Diverse Symbolic Dynamics for Unstable Periodic Orbits
4.1. Variational Method
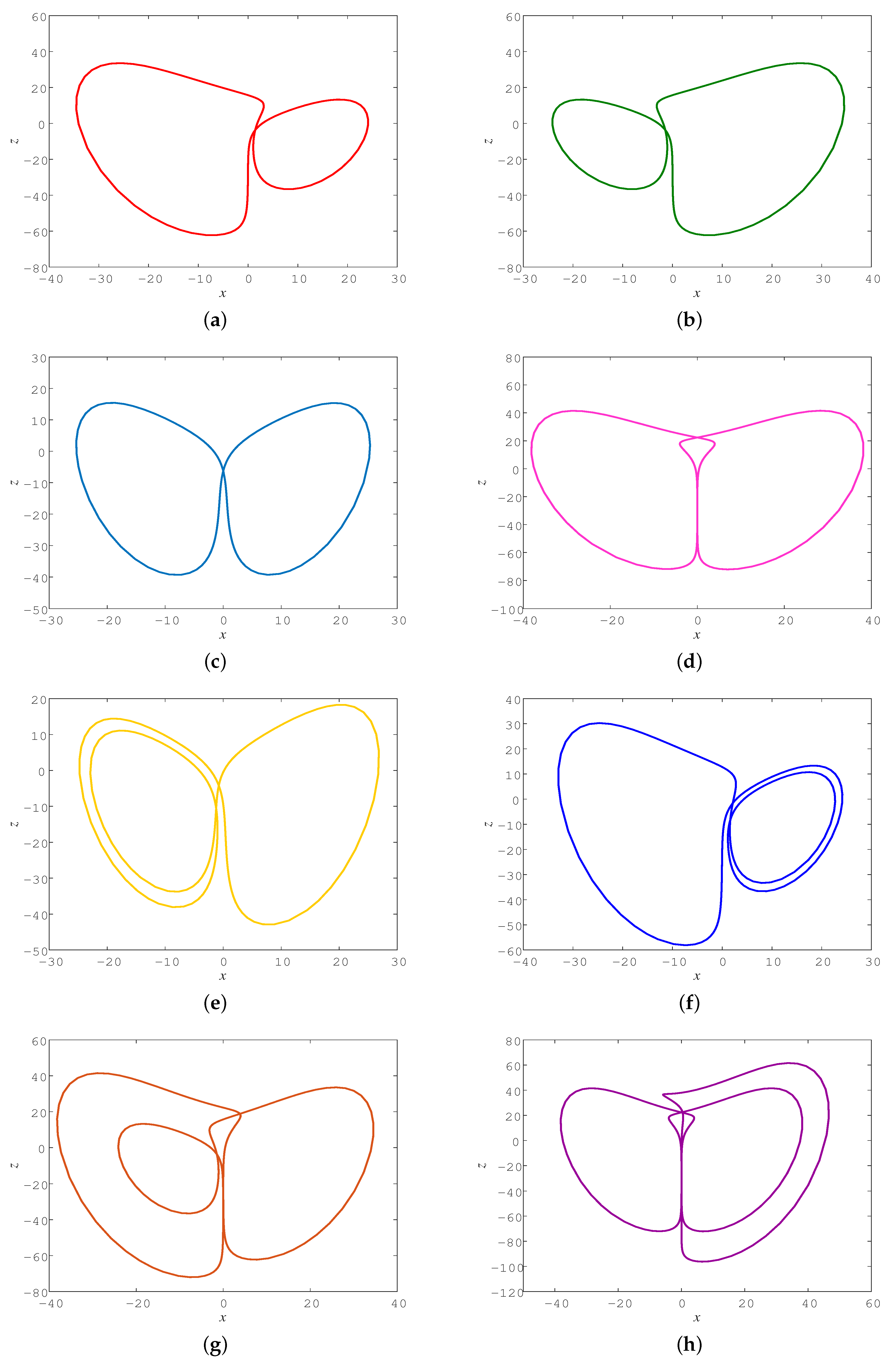
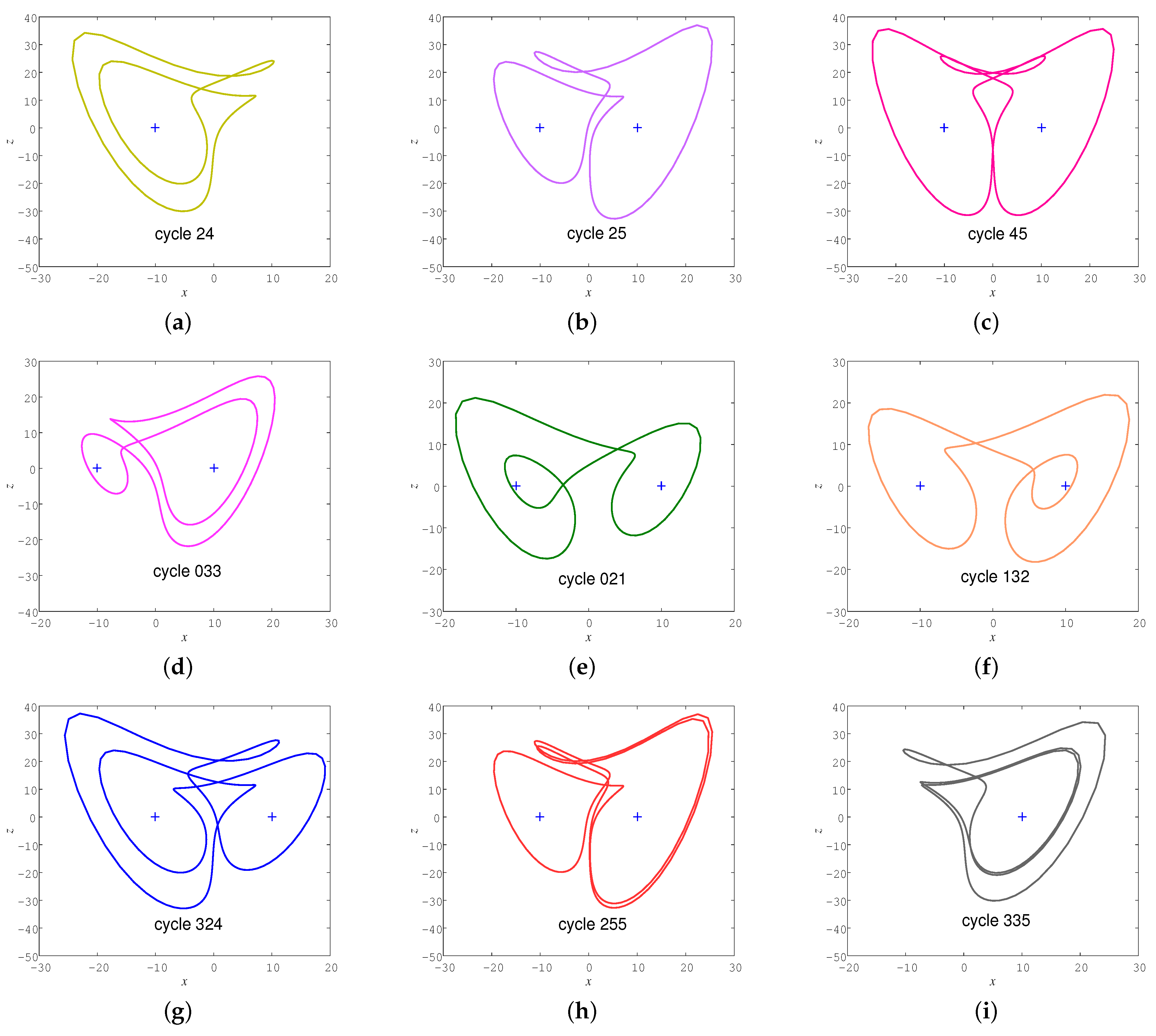
4.2. Unstable Cycles Embedded in Hidden Chaotic Attractor for
4.3. Unstable Periodic Orbits Embedded in Self-Excited Chaotic Attractor for
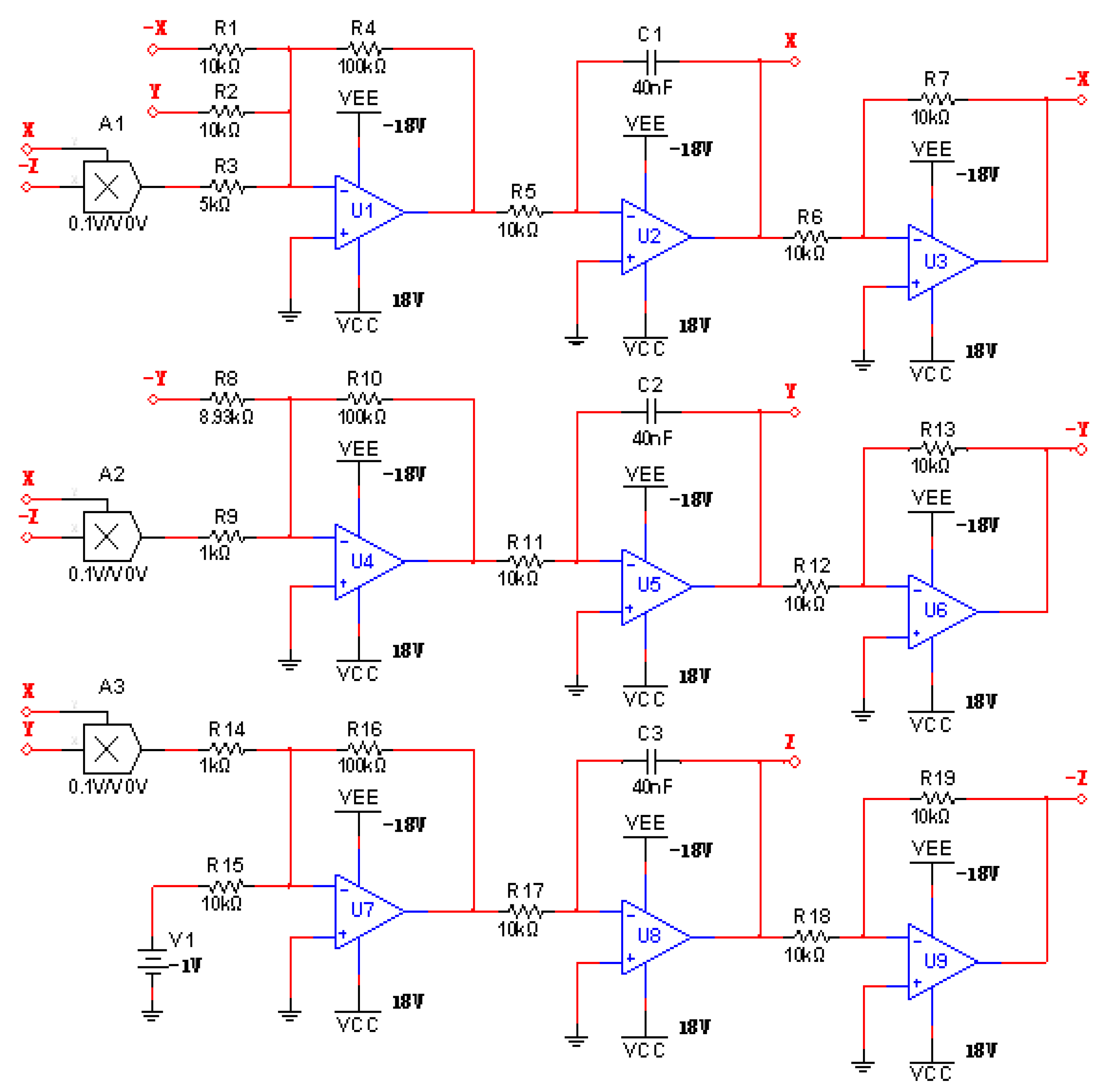
5. Circuit Simulation
6. Conclusions and Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Fu, S.; Liu, Y.; Ma, H.; Du, Y. Control chaos to different stable states for a piecewise linear circuit system by a simple linear control. Chaos Solitons Fractals 2020, 130, 109431. [Google Scholar] [CrossRef]
- Gong, L.H.; Luo, H.X.; Wu, R.Q.; Zhou, N.R. New 4D chaotic system with hidden attractors and self-excited attractors and its application in image encryption based on RNG. Physica A 2022, 591, 126793. [Google Scholar] [CrossRef]
- Hassan, M.F. Synchronization of uncertain constrained hyperchaotic systems and chaos-based secure communications via a novel decomposed nonlinear stochastic estimator. Nonlinear Dyn. 2016, 83, 2183–2211. [Google Scholar] [CrossRef]
- Sangiorgio, M.; Dercole, F. Robustness of lstm neural networks for multi-step forecasting of chaotic time series. Chaos Solitons Fractals 2020, 139, 110045. [Google Scholar] [CrossRef]
- Zhou, L.; You, Z.; Tang, Y. A new chaotic system with nested coexisting multiple attractors and riddled basins. Chaos Solitons Fractals 2021, 148, 111057. [Google Scholar] [CrossRef]
- Nwachioma, C.; Pérez-Cruz, J.H. Analysis of a new chaotic system, electronic realization and use in navigation of differential drive mobile robot. Chaos Solitons Fractals 2021, 144, 110684. [Google Scholar] [CrossRef]
- Wang, G.; Yuan, F.; Chen, G.; Zhang, Y. Coexisting multiple attractors and riddled basins of a memristive system. Chaos 2018, 28, 013125. [Google Scholar] [CrossRef]
- Ly, A.; Qy, A.; Gc, B. Hidden attractors, singularly degenerate heteroclinic orbits, multistability and physical realization of a new 6D hyperchaotic system. Commun. Nonlinear Sci. Numer. Simul. 2020, 90, 105362. [Google Scholar]
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.V.; Leonov, G.A.; Prasad, A. Hidden attractors in dynamical systems. Phy. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Nazarimehr, F. Recent new examples of hidden attractors. Eur. Phys. J. Spec. Top. 2015, 224, 1469–1476. [Google Scholar] [CrossRef]
- Pham, V.T.; Kapitaniak, T.; Volos, C. Systems with Hidden Attractors: From Theory to Realization in Circuits; Springer: Berlin, Germany, 2017; pp. 11–13. [Google Scholar]
- Chen, G.R.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar] [CrossRef]
- Qi, G.; Chen, G.; Du, S.; Chen, Z.; Yuan, Z. Analysis of a new chaotic system. Physica A 2005, 352, 295–308. [Google Scholar] [CrossRef]
- Sprott, J.C. Some simple chaotic flows. Phys. Rev. E 1994, 50, 647–650. [Google Scholar] [CrossRef] [PubMed]
- Guan, X.; Xie, Y. Connecting curve: A new tool for locating hidden attractors. Chaos 2021, 31, 113143. [Google Scholar] [CrossRef] [PubMed]
- Kuznetsov, N.V.; Leonov, G.A.; Mokaev, T.N.; Prasad, A.; Shrimali, M.D. Finite-time lyapunov dimension and hidden attractor of the rabinovich system. Nonlinear Dyn. 2018, 92, 267–285. [Google Scholar] [CrossRef] [Green Version]
- Deng, Q.; Wang, C. Multi-scroll hidden attractors with two stable equilibrium points. Chaos 2019, 29, 093112. [Google Scholar] [CrossRef] [PubMed]
- Yang, T. Multistability and hidden attractors in a three-dimensional chaotic system. Int. J. Bifurc. Chaos 2020, 30, 2050087. [Google Scholar] [CrossRef]
- Molaie, M.; Jafari, S.; Sprott, J.C.; Golpayegani, S.M.R.H. Simple chaotic flows with one stable equilibrium. Int. J. Bifurc. Chaos 2013, 23, 1350188. [Google Scholar] [CrossRef]
- Huang, L.; Wang, Y.; Jiang, Y.; Lei, T. A novel memristor chaotic system with a hidden attractor and multistability and its implementation in a circuit. Math. Probl. Eng. 2021, 2021, 7457220. [Google Scholar] [CrossRef]
- Wang, X.; Viet-Thanh, P.; Christos, V. Dynamics, circuit design, and synchronization of a new chaotic system with closed curve equilibrium. Complexity 2017, 2017, 7138971. [Google Scholar] [CrossRef] [Green Version]
- Jafari, S.; Sprott, J.C.; Pham, V.T.; Volos, C.; Li, C. Simple chaotic 3d flows with surfaces of equilibria. Nonlinear Dyn. 2016, 86, 1349–1358. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, Z.; Li, J.; Wu, X.; Cui, Z. A hidden chaotic system with multiple attractors. Entropy 2021, 23, 1341. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Sprott, J.C. Coexisting hidden attractors in a 4-D simplified lorenz system. Int. J. Bifurc. Chaos 2014, 24, 1450034. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Mohammad Reza Hashemi Golpayegani, S. Elementary quadratic chaotic flows with no equilibria. Phys. Lett. A 2013, 377, 699–702. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, G.; Shen, Y.; Yuan, F.; Yu, S. Hidden coexisting attractors in a chaotic system without equilibrium point. Int. J. Bifurc. Chaos 2018, 28, 1830033. [Google Scholar] [CrossRef]
- Zuo, J.L.; Li, C.L. Multiple attractors and dynamic analysis of a no-equilibrium chaotic system. Optik 2016, 127, 7952–7957. [Google Scholar] [CrossRef]
- Maaita, J.O.; Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. The dynamics of a cubic nonlinear system with no equilibrium point. J. Nonlinear Dyn. 2015, 2015, 257923. [Google Scholar] [CrossRef] [Green Version]
- Sprott, J.C.; Jafari, S.; Pham, V.T.; Hosseinib, Z.S. A chaotic system with a single unstable node. Phys. Lett. A 2015, 379, 2030–2036. [Google Scholar] [CrossRef]
- Wang, X.; Chen, G.R. A chaotic system with only one stable equilibrium. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1264–1272. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z. Dynamical behaviors of a chaotic system with no equilibria. Phys. Lett. A 2011, 376, 102–108. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, L.; Xiang, J.; Bao, H.; Li, H. Generating multi-wing hidden attractors with only stable node-foci via non-autonomous approach. Phys. Scr. 2021, 96, 125220. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, Q. Dynamical analysis of the generalized sprott C system with only two stable equilibria. Nonlinear Dyn. 2012, 68, 543–554. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, P.; Chen, M.; Wang, Y. Dynamic analysis and robust control of a chaotic system with hidden attractor. Complexity 2021, 2021, 8865522. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, W.; Wei, Z.; Zhang, S. Dynamics and delayed feedback control for a 3D jerk system with hidden attractor. Nonlinear Dyn. 2015, 82, 577–588. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, W.; Yao, M. On the periodic orbit bifurcating from one single non-hyperbolic equilibrium in a chaotic jerk system. Nonlinear Dyn. 2015, 82, 1251–1258. [Google Scholar] [CrossRef]
- Qi, A.; Muhammad, K.; Liu, S. Dynamical analysis of the meminductor-based chaotic system with hidden attractor. Fractals 2021, 29, 2140020. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, W.; Wang, Z.; Yao, M. Hidden attractors and dynamical behaviors in an extended Rikitake system. Int. J. Bifurc. Chaos 2015, 25, 1550028. [Google Scholar] [CrossRef]
- Wei, Z.; Yu, P.; Zhang, W.; Yao, M. Study of hidden attractors, multiple limit cycles from Hopf bifurcation and boundedness of motion in the generalized hyperchaotic Rabinovich system. Nonlinear Dyn. 2015, 82, 131–141. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, W. Hidden hyperchaotic attractors in a modified Lorenz–Stenflo system with only one stable equilibrium. Int. J. Bifurc. Chaos 2014, 24, 1450127. [Google Scholar] [CrossRef]
- Wei, Z.; Moroz, I.; Sprott, J.C.; Akgul, A.; Zhang, W. Hidden hyperchaos and electronic circuit application in a 5D self-exciting homopolar disc dynamo. Chaos 2017, 27, 033101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, N.; Zhang, G.; Kuznetsov, N.V.; Bao, H. Hidden attractors and multistability in a modified Chua’s circuit. Commun. Nonlinear Sci. Numer. Simul. 2021, 92, 105494. [Google Scholar] [CrossRef]
- Bao, H.; Hu, A.; Liu, W.; Bao, B. Hidden bursting firings and bifurcation mechanisms in memristive neuron model with threshold electromagnetic induction. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 502–511. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Wang, C.; Deng, Q. A new 3d multi-scroll chaotic system generated with three types of hidden attractors. Eur. Phys. J. Spec. Top. 2021, 230, 1863–1871. [Google Scholar] [CrossRef]
- Wei, Z.; Li, Y.; Sang, B.; Liu, Y.; Zhang, W. Complex dynamical behaviors in a 3D simple chaotic flow with 3D stable or 3D unstable manifolds of a single equilibrium. Int. J. Bifurc. Chaos 2019, 29, 1950095. [Google Scholar] [CrossRef]
- Kingni, S.T.; Jafari, S.; Pham, V.T.; Woafo, P. Constructing and analyzing of a unique three-dimensional chaotic autonomous system exhibiting three families of hidden attractors. Math. Comput. Simul. 2017, 132, 172–182. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, Y.; Li, Z.; Wang, M.; Le, X. Generating one to four-wing hidden attractors in a novel 4D no-equilibrium chaotic system with extreme multistability. Chaos 2018, 28, 013113. [Google Scholar] [CrossRef] [PubMed]
- Jafari, S.; Ahmadi, A.; Khalaf, A.; Abdolmohammadi, H.R.; Pham, V.T.; Alsaadi, F.E. A new hidden chaotic attractor with extreme multi-stability. AEU—Int. J. Electron. C. 2018, 89, 131–135. [Google Scholar] [CrossRef]
- Cang, S.; Yue, L.; Zhang, R.; Wang, Z. Hidden and self-excited coexisting attractors in a lorenz-like system with two equilibrium points. Nonlinear Dyn. 2019, 95, 381–390. [Google Scholar] [CrossRef]
- Yang, Q.; Wei, Z.; Chen, G. An unusual 3d autonomous quadratic chaotic system with two stable node-foci. Int. J. Bifurc. Chaos 2010, 20, 1061–1083. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Physica D 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Perseus Books: Reading, MA, USA, 1994; pp. 44–45. [Google Scholar]
- Cvitanović, P.; Artuso, R.; Mainieri, R.; Tanner, G.; Vattay, G. Chaos: Classical and Quantum; Niels Bohr Institute: Copenhagen, Denmark, 2012; pp. 131–133. [Google Scholar]
- Lan, Y.; Cvitanović, P. Variational method for finding periodic orbits in a general flow. Phys. Rev. E 2004, 69, 016217. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.; Jia, L.; Jie, Q.; Li, H. Symbolic encoding of periodic orbits and chaos in the Rucklidge system. Complexity 2021, 2021, 4465151. [Google Scholar] [CrossRef]
- Lan, Y.; Cvitanović, P. Unstable recurrent patterns in Kuramoto–Sivashinsky dynamics. Phys. Rev. E 2008, 78, 026208. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, C.; Liu, H.; Li, H. Unstable periodic orbits analysis in the generalized Lorenz-type system. J. Stat. Mech. 2020, 2020, 073211. [Google Scholar] [CrossRef]
- Dong, C. Topological classification of periodic orbits in the kuramoto–sivashinsky equation. Mod. Phys. Lett. B 2018, 32, 1850155. [Google Scholar] [CrossRef]
- Lan, Y.; Chandre, C.; Cvitanović, P. Newton’s descent method for the determination of invariant tori. Phys. Rev. E 2006, 74, 046206. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.; Lan, Y. A variational approach to connecting orbits in nonlinear dynamical systems. Phys. Lett. A 2014, 378, 705–712. [Google Scholar] [CrossRef]
- Dong, C.; Lan, Y. Organization of spatially periodic solutions of the steady Kuramoto–Sivashinsky equation. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2140–2153. [Google Scholar] [CrossRef]
- Dong, C.; Liu, H.; Jie, Q.; Li, H. Topological classification of periodic orbits in the generalized Lorenz-type system with diverse symbolic dynamics. Chaos Solitons Fractals 2022, 154, 111686. [Google Scholar] [CrossRef]
- Hao, B.L.; Zheng, W.M. Applied Symbolic Dynamics and Chaos; World Scientic: Singapore, 1998; pp. 11–13. [Google Scholar]
- Ray, A.; Ghosh, D.; Chowdhury, A.R. Topological study of multiple coexisting attractors in a nonlinear system. J. Phys. A-Math. Theor. 2009, 42, 385102. [Google Scholar] [CrossRef]
- Li, K.; Bao, H.; Li, H.; Ma, J.; Hua, Z.; Bao, B. Memristive Rulkov neuron model with magnetic induction effects. IEEE Trans. Ind. Inform. 2022, 18, 1726–1736. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.; Li, H.; Chen, M.; Bao, B. Discrete memristor hyperchaotic maps. IEEE Trans. Circuits—I 2021, 68, 4534–4544. [Google Scholar] [CrossRef]
- Li, H.; Hua, Z.; Bao, H.; Zhu, L.; Chen, M.; Bao, B. Two-dimensional memristive hyperchaotic maps and application in secure communication. IEEE Trans. Ind. Electron. 2021, 68, 9931–9940. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.; Wang, N.; Zhu, L.; Chen, M.; Bao, B. Initials-boosted coexisting chaos in a 2-D Sine map and its hardware implementation. IEEE Trans. Ind. Inform. 2021, 17, 1132–1140. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | p | x | y | z | |
|---|---|---|---|---|---|
| 1 | 0 | 0.635920 | −7.028076 | 0.430355 | 1.092913 |
| 1 | 0.635920 | 7.028076 | −0.430355 | 1.092913 | |
| 2 | 1.192933 | 2.544434 | 12.123766 | 20.650672 | |
| 3 | 1.192933 | −2.544434 | −12.123766 | 20.650672 | |
| 2 | 12 | 1.752388 | 2.807407 | 6.313538 | 12.146665 |
| 03 | 1.752388 | −2.807407 | −6.313538 | 12.146665 | |
| 01 | 1.467965 | 0.100280 | 1.271667 | −7.073590 | |
| 23 | 2.383824 | −14.090307 | 17.922194 | 33.086632 | |
| 3 | 001 | 2.174153 | −7.214950 | 4.081725 | 7.082844 |
| 011 | 2.174153 | 7.214950 | −4.081725 | 7.082844 | |
| 003 | 2.361334 | −1.162938 | −0.669254 | −14.983886 | |
| 112 | 2.361334 | 1.162938 | 0.669254 | −14.983886 | |
| 132 | 2.940945 | −2.570910 | −0.291669 | 11.591391 | |
| 023 | 2.940945 | 2.570910 | 0.291669 | 11.591391 | |
| 021 | 2.554559 | −0.016908 | −0.016629 | −31.681837 | |
| 013 | 2.554559 | 0.016908 | 0.016629 | −31.681837 | |
| 033 | 2.946229 | 0.291076 | 0.540818 | −60.155264 | |
| 122 | 2.946229 | −0.291076 | −0.540818 | −60.155264 | |
| 223 | 3.954898 | −5.509519 | −11.111451076 | −71.906347 | |
| 233 | 3.954898 | 5.509519 | 11.111451076 | −71.906347 |
| Length | p | Self-Linking | Length | p | Self-Linking | p | Self-Linking | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 1.016946 | 0 | 3 | 223 | 2.994130 | 0 | 031 | 2.447450 | 2 |
| 3 | 1.016946 | 0 | 233 | 2.994130 | 0 | 012 | 2.447450 | 2 | ||
| 2 | 01 | 1.358438 | 1 | 033 | 2.609712 | 2 | 132 | 2.505368 | 0 | |
| 23 | 1.965825 | 1 | 122 | 2.609712 | 2 | 023 | 2.505368 | 0 | ||
| 12 | 1.587528 | 1 | 021 | 2.323226 | 0 | |||||
| 03 | 1.587528 | 1 | 013 | 2.323226 | 0 | |||||
| 1 | 4 | 1.312552 | 1 | 445 | 4.235720 | 3 | 354 | 3.955079 | 2 | |
| 5 | 1.312552 | 1 | 455 | 4.235720 | 3 | 234 | 3.263831 | 1 | ||
| 2 | 24 | 2.289914 | 2 | 344 | 3.667897 | 1 | 325 | 3.263831 | 1 | |
| 25 | 2.354458 | 0 | 255 | 3.667897 | 1 | 225 | 3.367249 | 1 | ||
| 34 | 2.354458 | 0 | 335 | 3.312270 | 1 | 334 | 3.367249 | 1 | ||
| 35 | 2.289914 | 2 | 224 | 3.312270 | 1 | 254 | 3.606269 | 3 | ||
| 45 | 2.642183 | 1 | 244 | 3.600833 | 3 | 345 | 3.606269 | 3 | ||
| 3 | 235 | 3.349139 | 1 | 355 | 3.600833 | 3 | ||||
| 324 | 3.349139 | 1 | 245 | 3.955079 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, C. Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor. Fractal Fract. 2022, 6, 190. https://doi.org/10.3390/fractalfract6040190
Dong C. Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor. Fractal and Fractional. 2022; 6(4):190. https://doi.org/10.3390/fractalfract6040190
Chicago/Turabian StyleDong, Chengwei. 2022. "Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor" Fractal and Fractional 6, no. 4: 190. https://doi.org/10.3390/fractalfract6040190
APA StyleDong, C. (2022). Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor. Fractal and Fractional, 6(4), 190. https://doi.org/10.3390/fractalfract6040190