1. Introduction
Fractional calculus is a branch of mathematics concerned with derivatives and integrals of non-integer order. It has been applied in various fields including chemistry, biology, engineering, epidemic modeling, and viscoelasticity [
1,
2,
3,
4]. Several researchers have investigated differential equations of arbitrary order, beginning with the existence and uniqueness of solutions and moving on to analytical and computational techniques to find solutions [
5,
6,
7,
8].
Although there are several engineering applications for the construction of bridges and buildings, attentive analyses of elastic beam equations are required to ensure the stability of the structure. A cantilever beam is a rigid structural element that is rigidly fixed at a single point on one side while the other side is free. In structural engineering, the behavior of cantilever beams is often analyzed using classical beam theory, which is based on the assumptions of small deformations and linear elastic material behavior. In the context of a cantilever beam, fractional calculus can be used to analyze the response of the beam to external loads and predict its dynamic behavior under different conditions [
9,
10]. For example, the motion of a cantilever beam subjected to a harmonic load can be described using fractional differential equations. In addition, fractional calculus can be used to study the beam’s natural frequencies and mode shapes, which are important characteristics that influence its behavior [
11,
12].
Overall, employing fractional calculus in the analysis of cantilever beams can provide more accurate predictions of the behavior of these structures under various load conditions. By considering the effects of fractional derivatives on the stiffness and strength of a cantilever beam, it is possible to better understand and predict its response to external loads. This can be useful for the design and optimization of cantilever beams in a variety of applications. For example, the existence and uniqueness of solutions to the boundary value problem of the cantilever beam were studied in the framework of quantum calculus in [
13] and the
Hilfer derivative in [
14]. In addition, the deflection of the cantilever beam based on fractional calculus was also studied in [
15,
16]. Moreover, there are several methods available for solving fractional differential equations including integral transform techniques such as the Laplace and Fourier transforms, fixed-point techniques, and the Adomian decomposition method. These methods can be used to analyze the behavior of cantilever beams with fractional calculus and obtain the corresponding solutions.
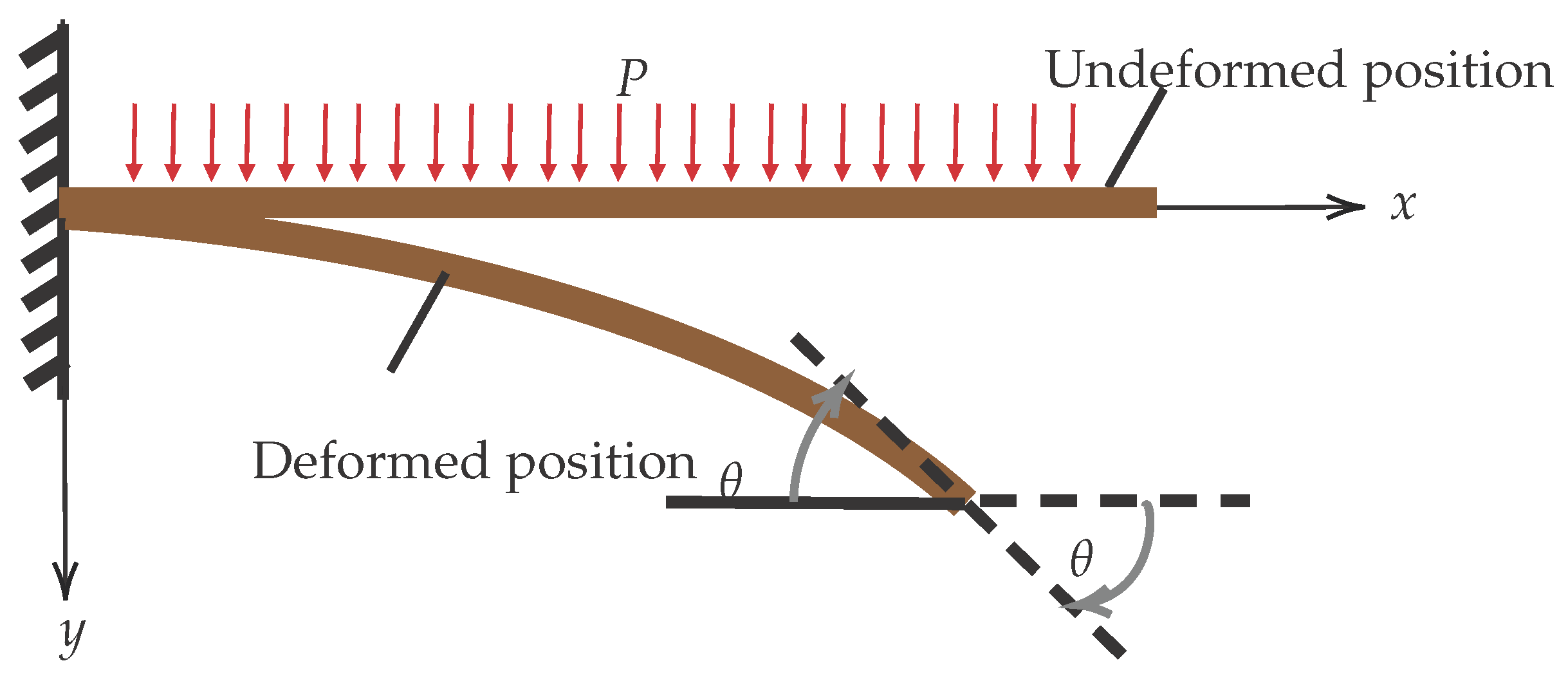
One significant method for determining an elastica’s equilibrium forms is to derive the condition for stationary of the total energy. Then, the corresponding boundary value problems associated with ordinary differential equations are used to determine the equilibrium shapes. Della et al. [
17] analyzed the equilibrium configuration of an elastica with one end clamped under a uniformly distributed load, which is depicted in
Figure 1.
They investigated the sufficient conditions for the stability and instability of the equilibrium shape of the elastica obtained from the minimization problem of the total energy functional described by
where
, and
denote the concentrated load, the length of the beam, the arc length, and the tangent angle, respectively.
It is possible to use fractional calculus to analyze the behavior of cantilever beams. In this approach, the beam is modeled as a dynamic system with memory and the governing equations of motion are described by fractional calculus operators. The solutions of these equations can provide insights into the response of the beam under various loading conditions and can be used to design and optimize the beam’s structural performance.
Motivated by previous works, we consider the generalization of the potential energy associated with the cantilever beam under the framework of fractional calculus and determine the shape that minimizes the functional
and satisfies the boundary conditions:
where
and
is the order of the Caputo fractional derivative. The properties of the minimizers of the total energy can be characterized by the corresponding Euler–Lagrange conditions.
The aim of this paper is to use Euler–Lagrange conditions for Problem (
2) to characterize the boundary value problem. Then, the well-known fixed-point theorems of Schaefer and Banach are used to establish the existence and uniqueness of the solutions for these boundary value problems. Different load values are analyzed for continuous dependence. Finally, we approximate the analytical solution for various loads and fractional orders to demonstrate the theoretical results. The main contribution of this paper is to provide an analysis of the deflection of the cantilever beam through the fractional energy functional derived from the physical and geometrical aspects in terms of the tangent angle or curvature, which is complementary to [
8,
16]. This technique can be applied to analyze the deformation of the cantilever beam under different load types.
The rest of the paper is organized as follows. In
Section 2, we introduce some notations and essential theoretical results on fractional calculus and calculus of variations. In
Section 3, the total energy is reformulated as a boundary value problem using Euler–Lagrange conditions. The existence and uniqueness results are proved via fixed-point techniques in
Section 4. Based on techniques from nonlinear functional analysis, we analyze the continuous dependence of minimizers on the different loads in
Section 5. Finally, the analytical solution is approximated by the homotopy perturbation method in
Section 6. We also present numerical examples to support the validity of the analytical results.
2. Preliminary Background of Fractional Calculus and Calculus of Variations
In this section, we first give some essential definitions and properties of fractional differential operators and fractional integral operators.
Further details on this subject and its applications can be found, in [
3,
18,
19].
2.1. Fractional Calculus
Let be a real valued function defined on the interval and .
Definition 1 (Fractional integral in the sense of Riemann–Liouville, [
3]).
The left and right Riemann–Liouville fractional integral operators of order of function are defined, respectively, by andfor all . Definition 2 (Fractional derivative in the sense of Riemann–Liouville [
3]).
The left and right Riemann–Liouville fractional derivatives of order of a function are defined, respectively, by and for all . We denote by the space of the functions defined on , which are absolutely continuous.
Definition 3 (Fractional derivative in the sense of Caputo, [
3]).
Let . The left and right Caputo fractional derivatives are defined, respectively, by and for all . Remark 1. For , the Riemann–Liouville and Caputo fractional derivatives satisfy the following relations:and Lemma 1 (Fundamental Theorem of Caputo Calculus, [
3]).
Let and let be a differentiable function on . We have and 2.2. Fractional Calculus of Variations
The fractional calculus of variations involves finding a function
that optimizes (minimizes or maximizes) a certain functional that depends on
and its fractional derivatives. Consider the optimization problem for the functional given by
with a Lagrangian
depending on
, which is a function of the independent variable
and its left Caputo fractional derivative of order
. For
given, we impose the boundary conditions:
Notice that becomes a functional for the classical calculus of variations when .
We next state the Euler–Lagrange equation for the above problem.
Theorem 1 (The Euler–Lagrange Equation for a Functional with Caputo Derivatives, [
20]).
Consider the optimization problem of the functional (3), where the Lagrangian belongs to under the boundary conditions (4). If is an optimal solution, the fractional Euler–Lagrange condition holds. 4. Existence and Uniqueness Results
This section is devoted to proving the existence and uniqueness of the solutions for the following problem:
where
. We apply Corollary 1 to define the integral operator
from
to
as
Theorem 2. The initial value problem (9) attains at least one solution in . Proof. Schaefer’s fixed-point theorem is used to show that the operator
given by (
10) has a fixed point. We outline the proof in the following steps.
Step 1: is a continuous operator.
Let
be a convergent sequence with
in
. For each
, we have
It follows that
which implies that
Step 2: The image of a bounded set in under is also a bounded set.
We show that there is a positive constant
such that
and
for
. Indeed, for any
, by the boundedness of the nonlinear term we have
thus,
where
Step 3: The image of a bounded set in under is an equicontinuous set.
Let
such that
and
, which is a bounded set of
, as above. Then, we see that
As , the right-hand side of the above inequality tends to zero. Following Step 1 to Step 3 and the Arzelá–Ascoli theorem, is completely continuous.
Step 4: A priori bounds. Let
for some
. We claim that
is bounded. Let
, then
for some
. Hence,
,
By the condition in Step 2, we obtain
and hence for every
,
This implies the boundedness of the set .
Consequently, Schaefer’s fixed-point theorem assures that
attains a fixed point, which is a solution of the boundary value problem (
9).
Theorem 3. Problem (9) has a unique solution in if Proof. We show that
is a contraction. For any
and
, we have
It follows that
We also establish the existence and uniqueness results with respect to the norm.
Theorem 4. Problem (9) has a unique solution in if Proof. It is obvious that is self-mapping on . We show that is a contraction.
For any
and
, we use Hölder’s inequality to obtain
This implies that
is a contraction satisfying (
11). Hence, the uniqueness of a fixed point of the map
in
follows from the Banach contraction principle.
5.
Continuous Dependence of Minimizers on Varying Loads
To study the continuity of minimizers when the load changes, we begin with a definition in terms of the branch of solutions.
Definition 4. Let us denote by a solution of (5) with and . We say that the set of minimizers for , with is a branch of solutions if the maps from to given by and are continuous functions of . According to the defined problem of the cantilever beam subjected to the downward uniformly distributed load, the deflection shape of the beam is a concave down. Consequently, the angle on will be in the range of to according to the deflection shape. Then, we obtain the following results.
Lemma 4. Let be a minimizer of the energy functional (explicitly depends on ). The function is a decreasing function.
Proof. Let be
. Then, we have
which implies that
is negative because
is positive on
(see
Figure 1).
Proposition 1. The set of minimizers for the functional (2) forms a branch of solutions. Proof. By Theorem 4, there exist
and
, which satisfy (
11) and provide the existence and uniqueness of the minimizers for
and
, respectively. We prove that
is a minimizing sequence for
if
.
For every
such that
and
in
, we have
Since
is the minimizer of
, it follows that
As the result holds for every
such that
and
in
, this yields that
or equivalently,
It follows that is a minimizing sequence for .
Now, we consider the difference
and
as
and
Then, by direct calculation and using the dominated convergence theorem, we obtain
as
, which completes the proof.
6. Approximate Solutions and Numerical Examples
The homotopy perturbation method (HPM) was pioneered and developed by He [
21]. This technique involves the introduction of an expanding parameter, which serves as an alternative approach. Let
be a differential operator and
be a boundary operator. In general, the HPM can be applied to nonlinear differential equations of the form
with boundary conditions
where
denotes the boundary of the domain
and
is a given analytical function.
The basic idea of the HPM is to split the operator
into linear and nonlinear parts denoted by
and
, respectively, so that (
12) can be rewritten as
Consider a homotopy
satisfying
or
where
is the first approximation of (
12) in correspondence with the boundary conditions and
is an embedding parameter. It can be readily seen from (
13) or (
14) that
Clearly, when
, (
13) or equivalently, (
14), is a linear equation, whereas when
, it is the original nonlinear problem. Hence, changing the embedding parameter
from
to
is equivalent to
with
. The basic idea of the HPM is thus to continuously deform a simpler problem into the more difficult original one.
We write the solution of (
13) or (
14) in terms of a power series in
:
By choosing
, we obtain an approximate solution of Equation ():
The power series (
15) converges in most circumstances. Nonetheless, the rate of convergence depends on the nonlinear operator
.
To illustrate this method, we solve the boundary value problem (
9) with
. We set the following homotopy:
If we expand the nonlinear term in (
16) using the Taylor series, we obtain
and
Hence, we can approximate (
16) as follows:
Substituting (
15) into the homotopy (
16) and applying the initial conditions, we obtain a set of linear differential equations from the coefficients of terms with equal powers of
as follows:
By applying Corollary 1 to the above equation, we obtain
so that the approximate solution of the problem is given by
From the tangent angle
of a cantilever beam, we can calculate the deflection shape of a cantilever beam at the equilibrium position in
-coordinates based on the following equations:
Example 1. Consider Problem (9), with , , and taking values of , , and . This example corresponds to a cantilever beam with a uniformly distributed load . Then, we obtain for and as follows: Then, by Theorems 2 and 3, we conclude that there is a unique tangent angle in that minimizes the energy functional of the beam. Furthermore, in light of Theorem 4, the boundary value problem has a unique solution in .
Applying the HPM, the approximate solution for the tangent angle is shown in Figure 2. Furthermore, the deflection shape of the beam under a uniformly distributed load at the equilibrium position can be depicted, as shown in Figure 3. It is highlighted that the curvature of the beam is larger for smaller orders of the fractional derivative. Example 2. Consider Problem (9) with , , and taking the values , , and . This example corresponds to a cantilever beam with a uniformly distributed load with . We obtain as follows: It follows from Theorem 4 that there is a unique tangent angle in that minimizes the energy functional of the beam. Applying the homotopy perturbation method, the approximate solution of the tangent angle can be determined, as shown in Figure 4. Furthermore, the deflection shape of the beam subjected to a uniformly distributed load at the equilibrium position can be depicted, as shown in Figure 5. It can be seen that the minimizers behave continuously when the loads and are close to , inducing continuous dependence on the loads, which is in agreement with Proposition 1. It is highlighted that the curvature of the beam depends on the load. 

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




