


A Comparative Study of Time Fractional Nonlinear Drinfeld–Sokolov–Wilson System via Modified Auxiliary Equation Method




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fundamentals of Fractional Derivatives
2.1. -Derivative
2.2. A New Fractional Local Derivative
3. Details of Suggested Methodology
- If and ,
- If and ,
- If and ,
4. Construction of Solutions via Modified Auxiliary Equation Method
- If and ,
- If and ,
- If and ,
- If and ,
- If and ,
- If and ,
- If and ,
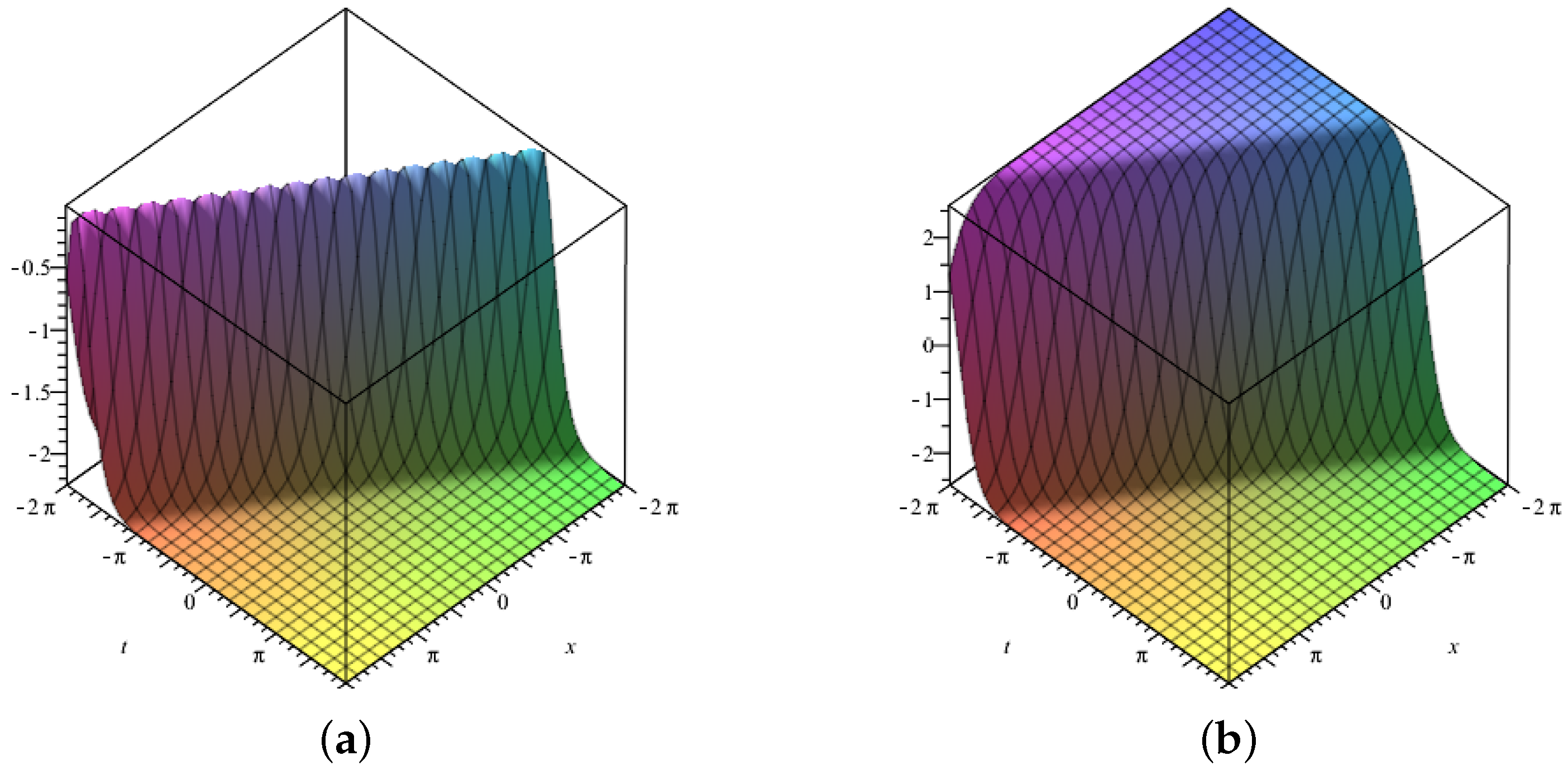
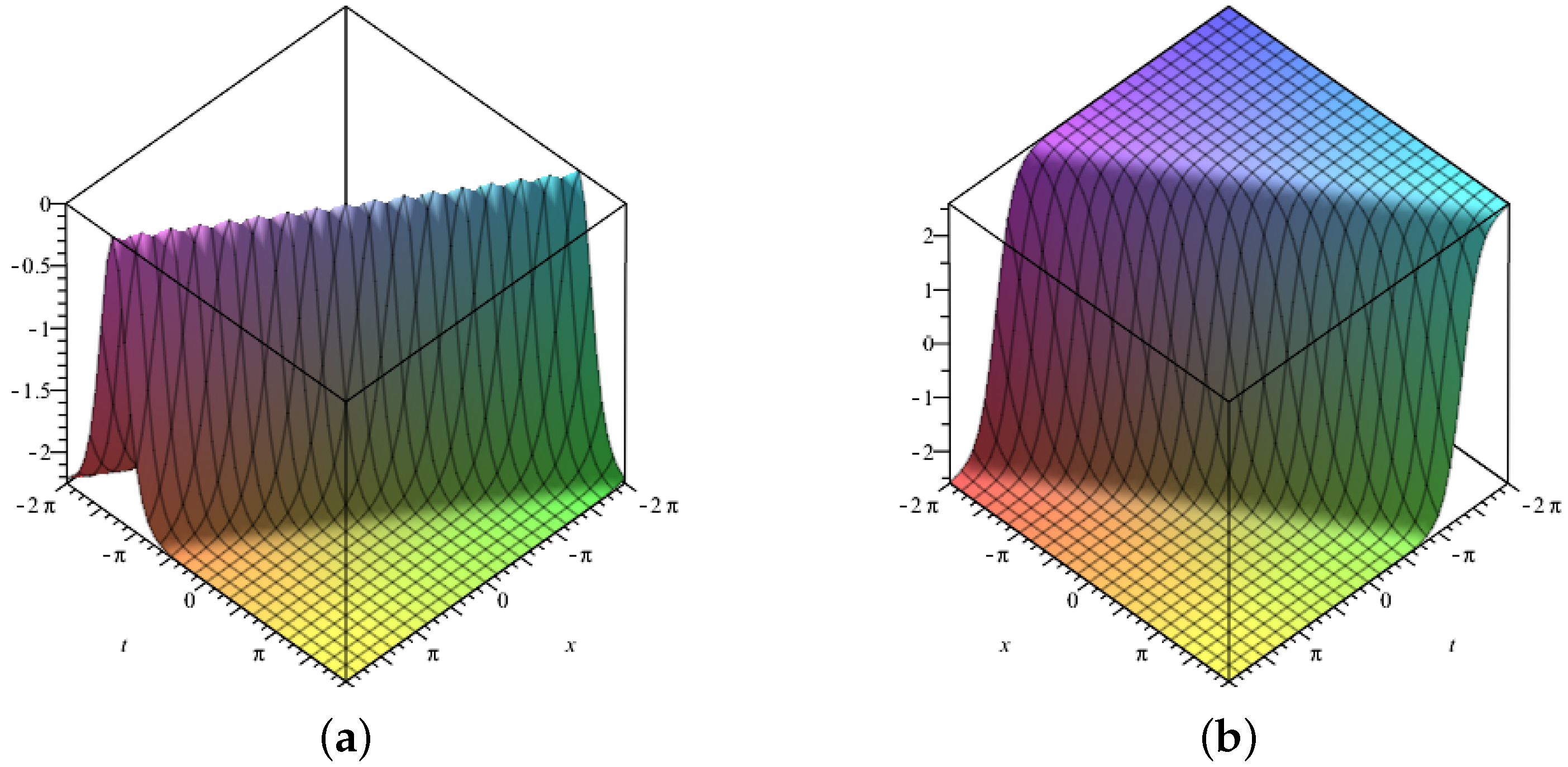
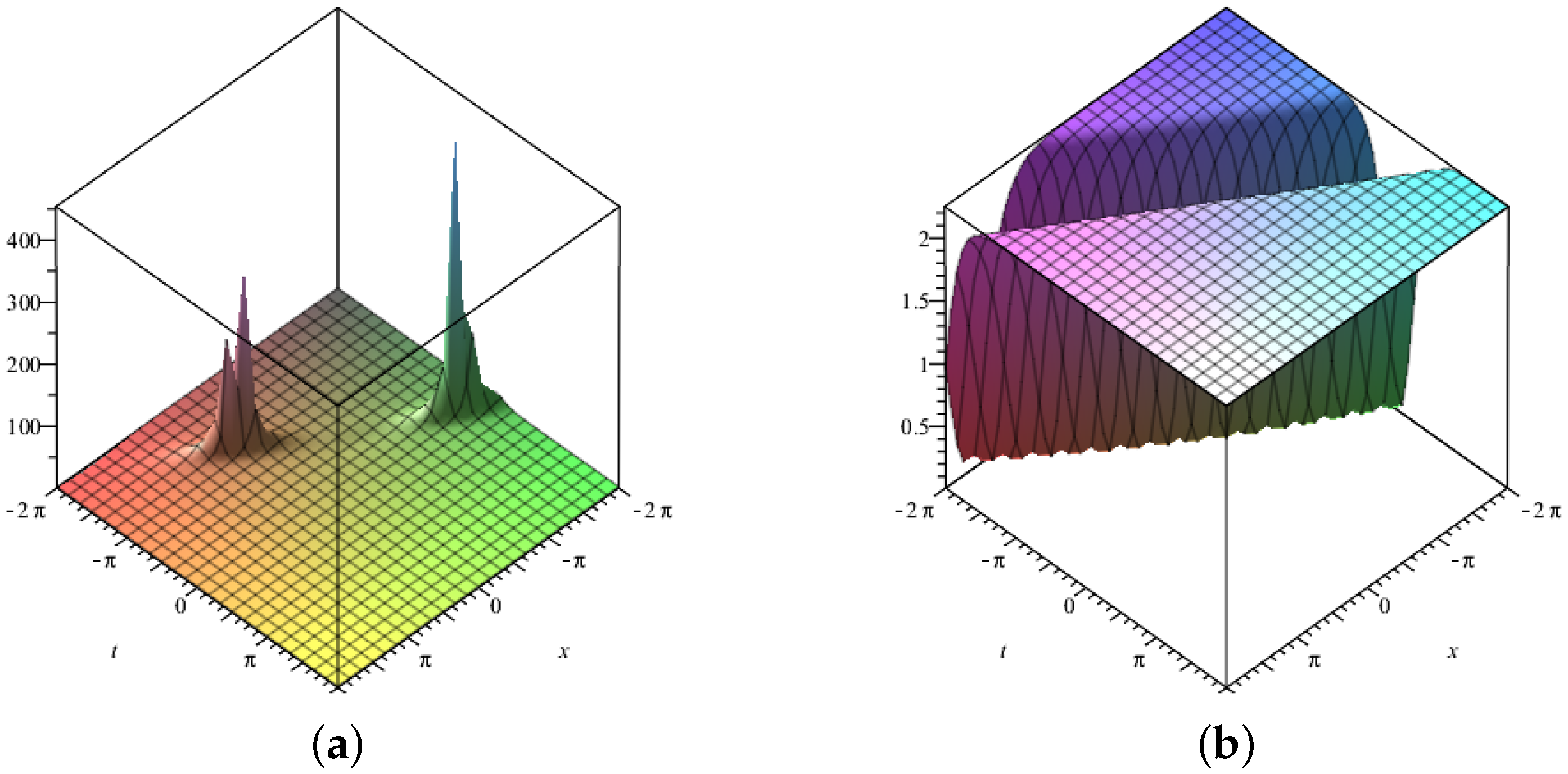
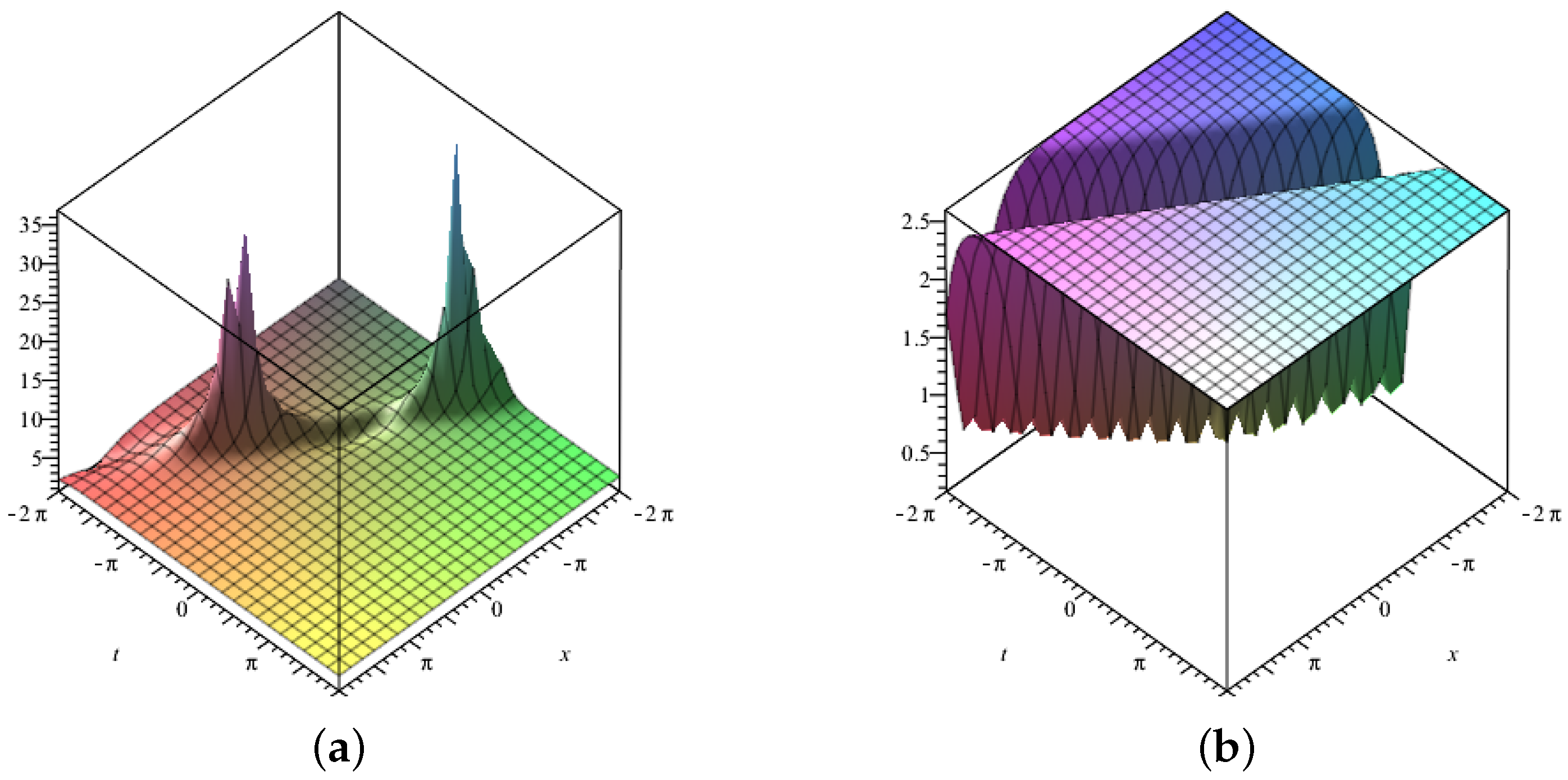
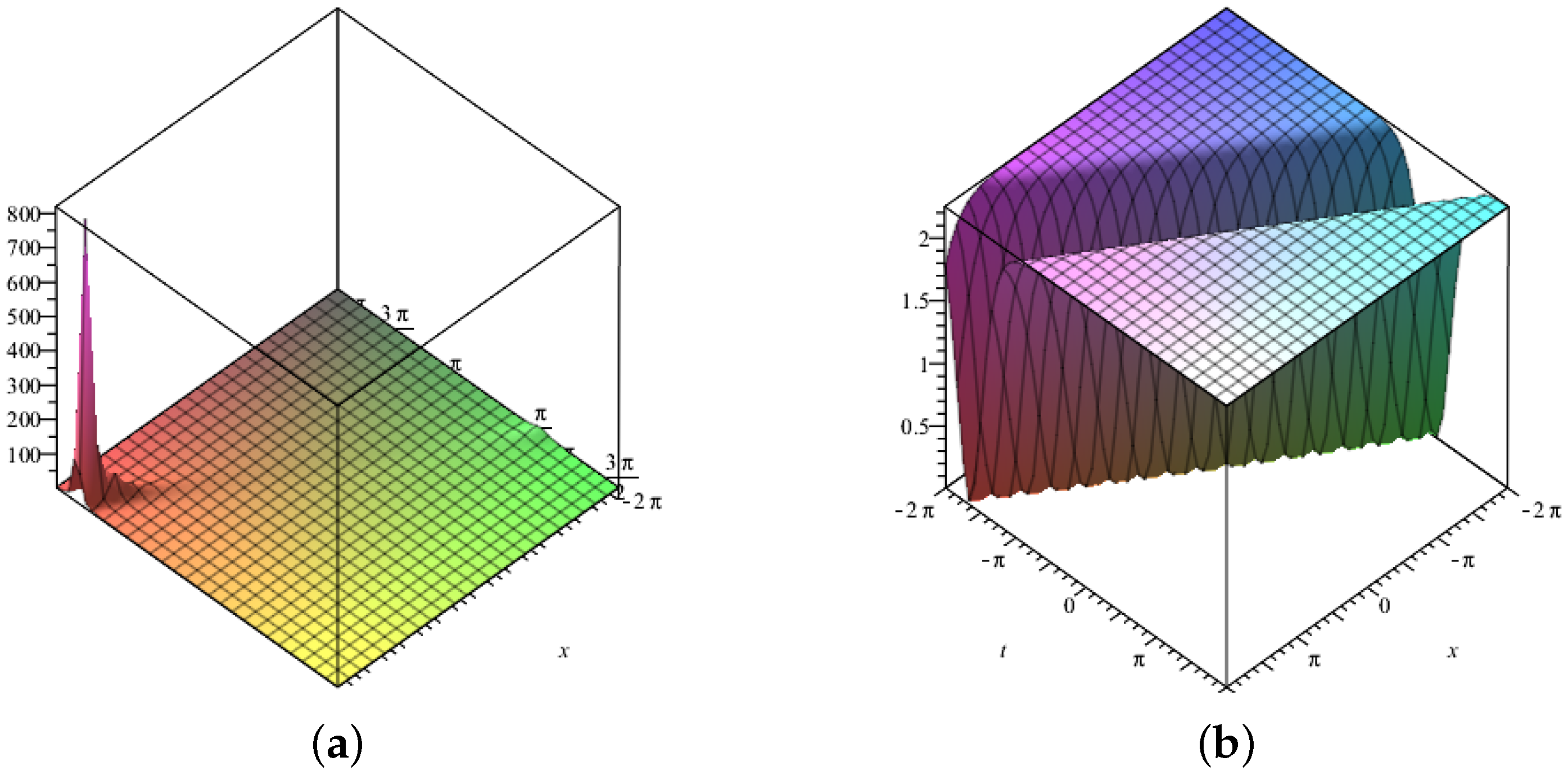
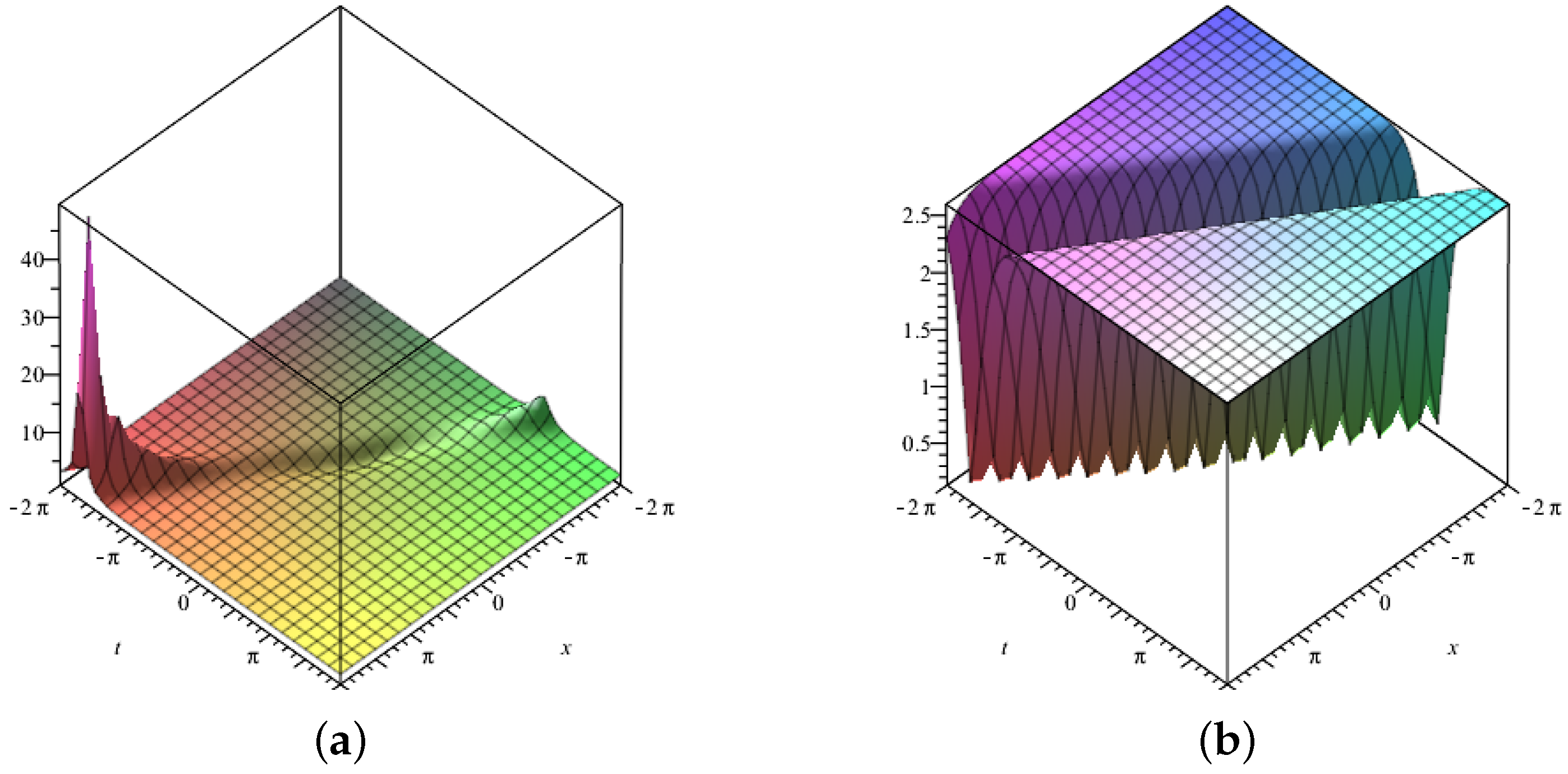
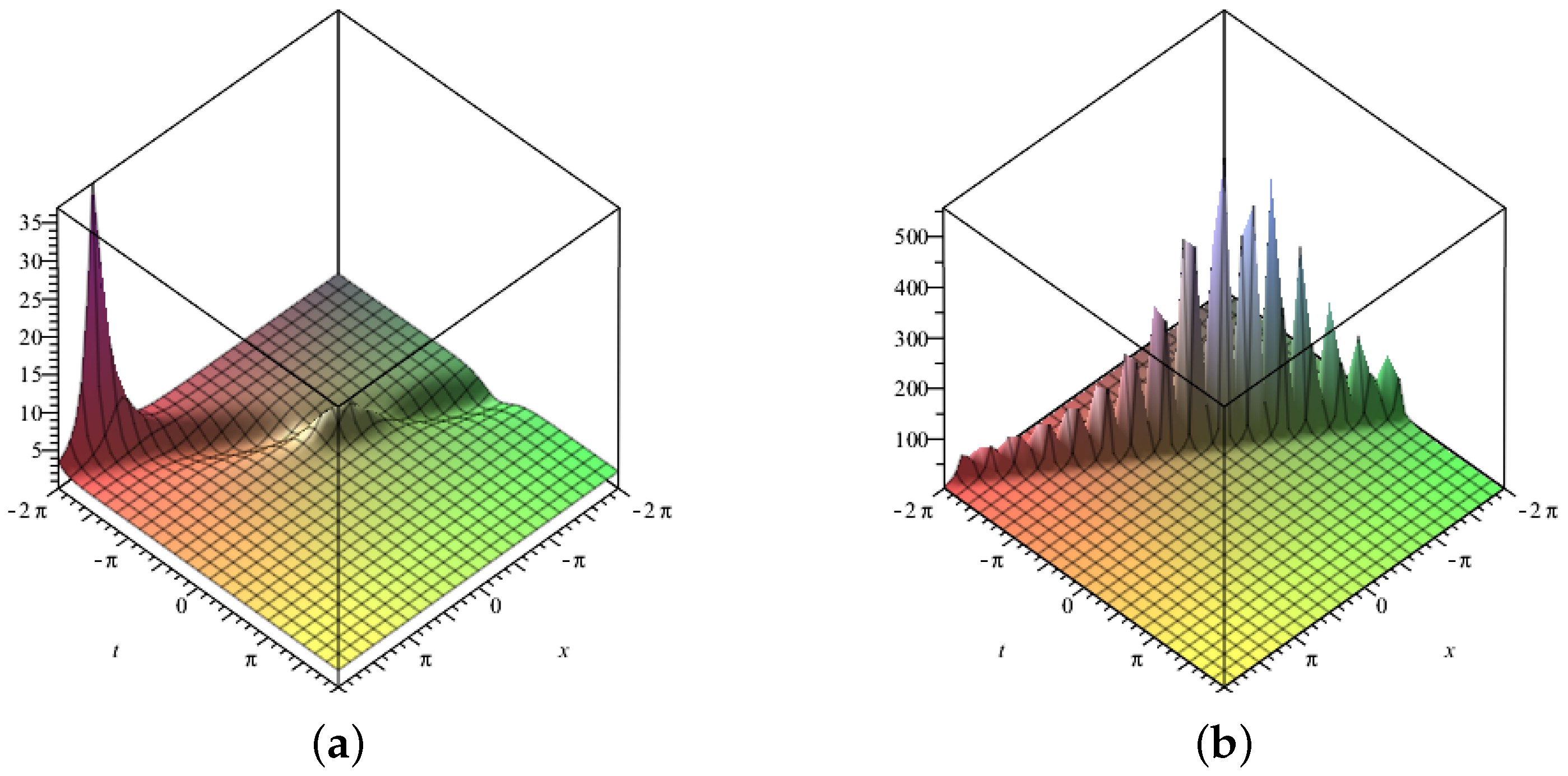
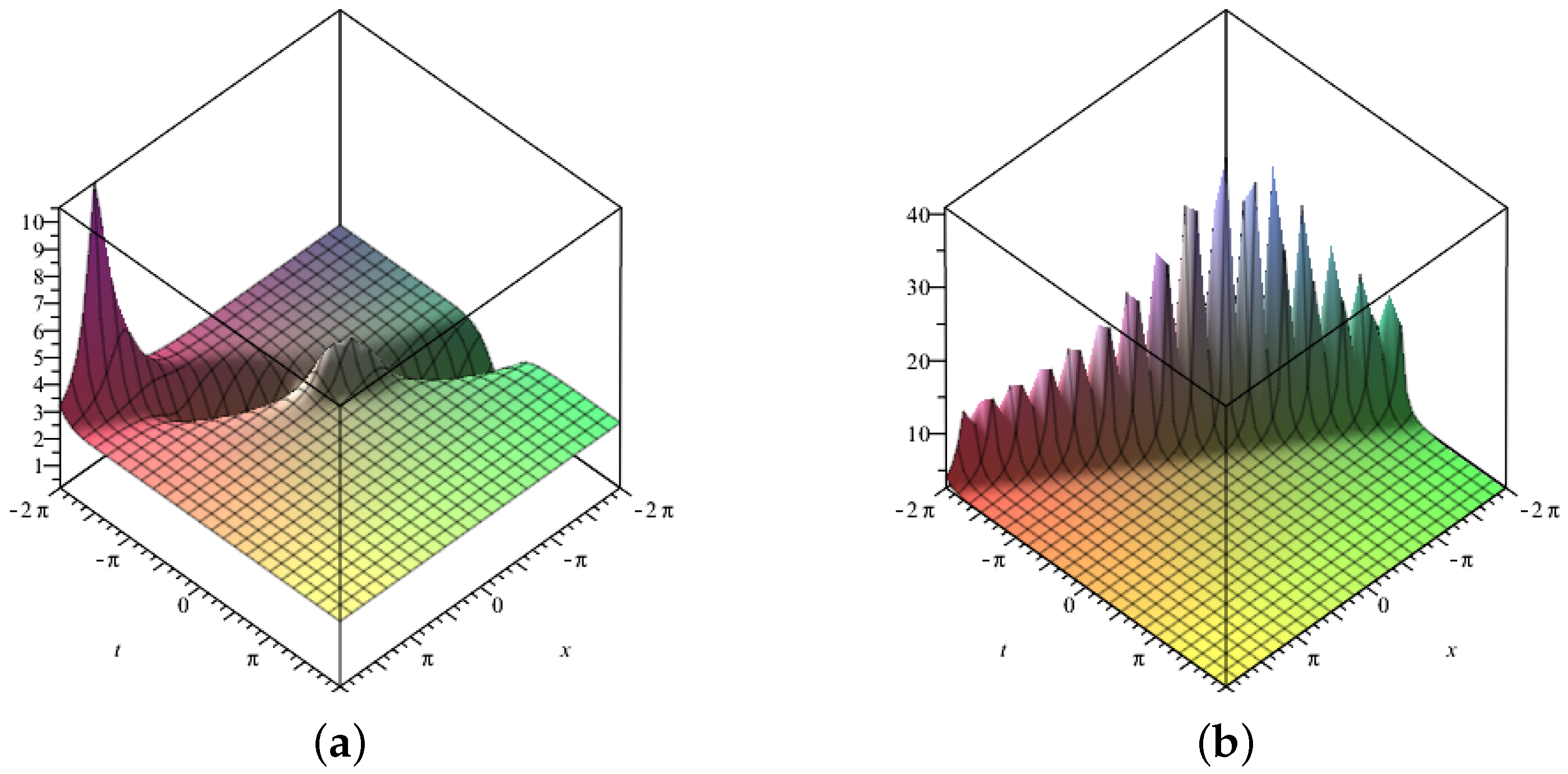
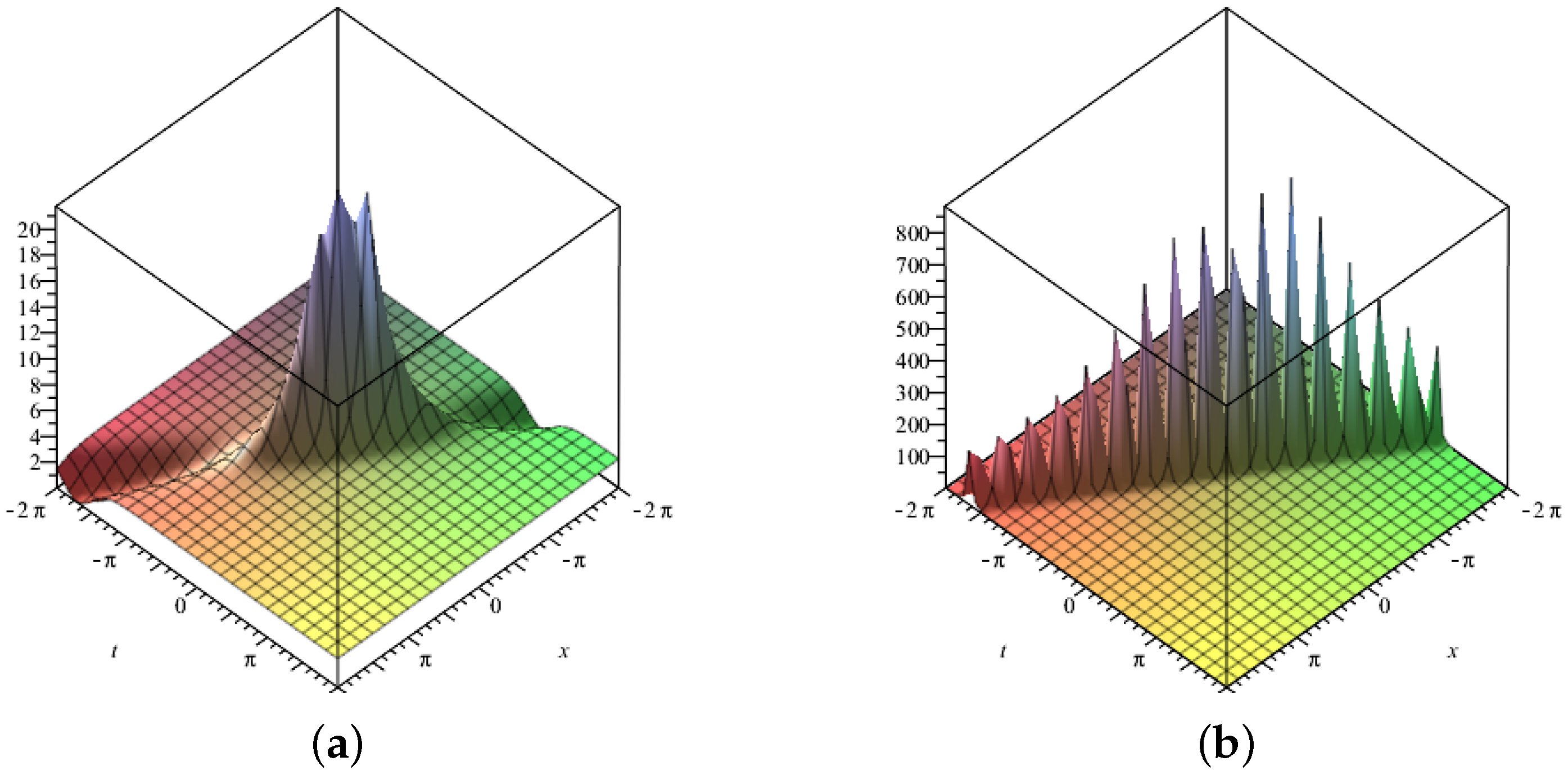
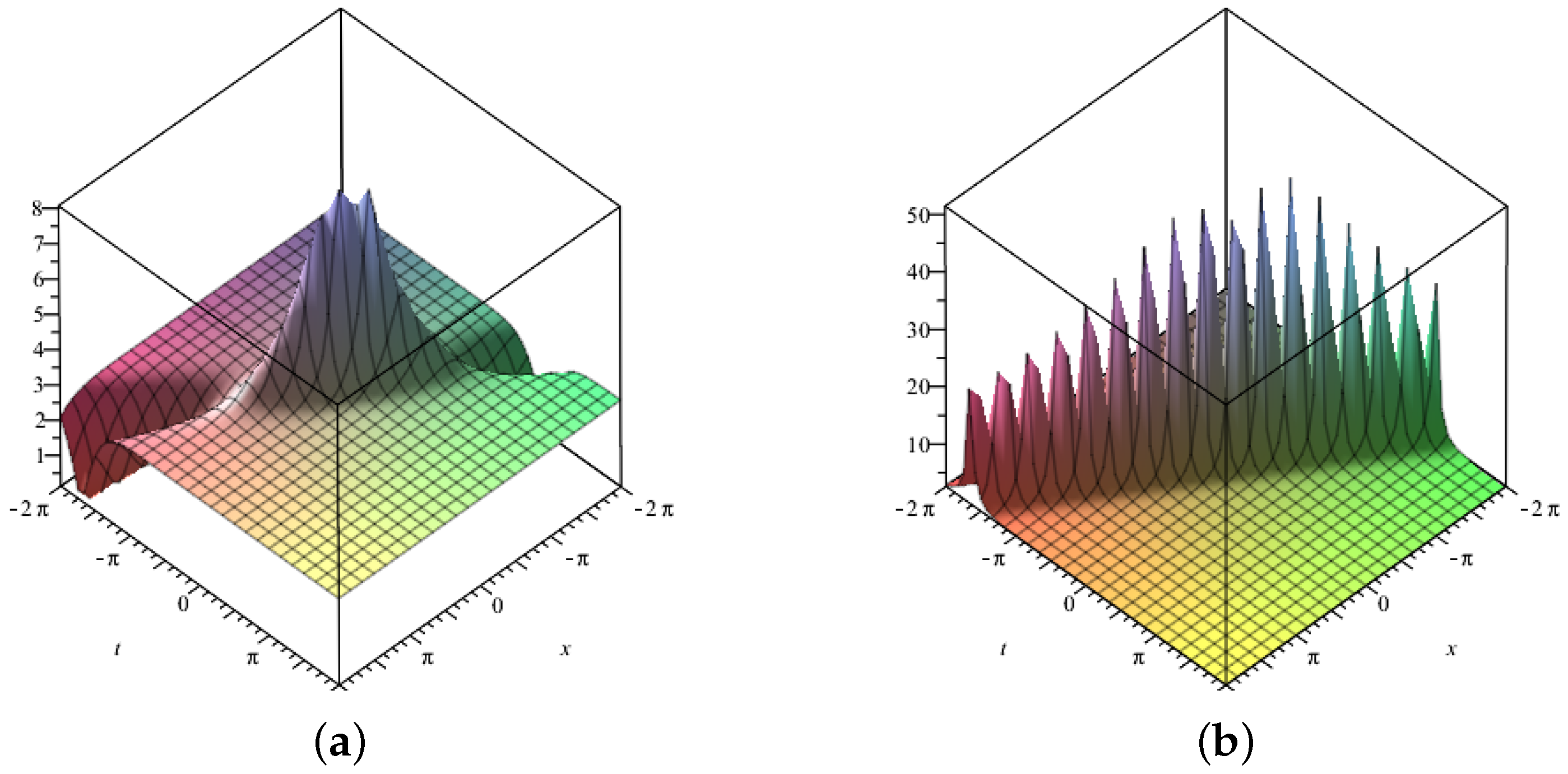
5. Results and Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, X.J.; Machado, J.T.; Baleanu, D. Exact traveling-wave solution for local fractional Boussinesq equation in fractal domain. Fractals 2017, 25, 1740006. [Google Scholar] [CrossRef]
- Wang, K.J.; Liu, J.H.; Si, J.; Shi, F.; Wang, G.D. N-soliton, breather, lump solutions and diverse traveling wave solutions of the fractional (2 + 1)-dimensional boussinesq equation. Fractals 2023, 31, 2350023. [Google Scholar] [CrossRef]
- Fuchs, S. Bijection and Cardinality. In Introduction to Proofs and Proof Strategies; Cambridge University Press: New York, NY, USA, 2023; pp. 155–156. [Google Scholar]
- Sprecher, D.A. Elements of Real Analysis; Academic Press, Inc.: New York, NY, USA, 1970; pp. 15–16. [Google Scholar]
- Naz, R. Conservation laws for a complexly coupled KdV system, coupled Burgers system and Drinfeld–Sokolov–Wilson system via multiplier approach. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1177–1182. [Google Scholar] [CrossRef]
- Zhang, W.M. Solitary solutions and singular periodic solutions of the Drinfeld-Sokolov-Wilson equation by variational approach. Appl. Math. Sci. 2011, 5, 1887–1894. [Google Scholar]
- Morris, R.; Kara, A. Double reductions/analysis of the Drinfeld–Sokolov–Wilson equation. Appl. Math. Comput. 2013, 219, 6473–6483. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Han, Z. Symmetry analysis and conservation laws of the Drinfeld-Sokolov-Wilson system. Eur. Phys. J. Plus 2014, 129, 1–7. [Google Scholar] [CrossRef]
- Jaradat, H.; Al-Shara, S.; Khan, Q.J.; Alquran, M.; Al-Khaled, K. Analytical solution of time-fractional Drinfeld-Sokolov-Wilson system using residual power series method. IAENG Int. J. Appl. Math. 2016, 46, 64–70. [Google Scholar]
- Tasbozan, O.; Şenol, M.; Kurt, A.; Özkan, O. New solutions of fractional Drinfeld-Sokolov-Wilson system in shallow water waves. Ocean. Eng. 2018, 161, 62–68. [Google Scholar] [CrossRef]
- Singh, J.; Kumar, D.; Baleanu, D.; Rathore, S. An efficient numerical algorithm for the fractional Drinfeld–Sokolov–Wilson equation. Appl. Math. Comput. 2018, 335, 12–24. [Google Scholar] [CrossRef]
- Gao, W.; Veeresha, P.; Prakasha, D.; Baskonus, H.M.; Yel, G. A powerful approach for fractional Drinfeld–Sokolov–Wilson equation with Mittag-Leffler law. Alex. Eng. J. 2019, 58, 1301–1311. [Google Scholar] [CrossRef]
- Srivastava, H.; Saad, K.M. Some new and modified fractional analysis of the time-fractional Drinfeld–Sokolov–Wilson system. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 113104. [Google Scholar] [CrossRef] [PubMed]
- Al-Rozbayani, A.M.; Ali, A.H. Applied Sumudu transform with Adomian decomposition method to the coupled Drinfeld–Sokolov–Wilson system. AL-Rafidain J. Comput. Sci. Math. 2021, 15, 139–147. [Google Scholar] [CrossRef]
- Saifullah, S.; Ali, A.; Shah, K.; Promsakon, C. Investigation of fractal fractional nonlinear Drinfeld–Sokolov–Wilson system with non-singular operators. Results Phys. 2022, 33, 105145. [Google Scholar] [CrossRef]
- Wang, K.J.; Wang, G.D. Periodic solution of the (2+ 1)-dimensional nonlinear electrical transmission line equation via variational method. Results Phys. 2021, 20, 103666. [Google Scholar] [CrossRef]
- Hussain, R.; Imtiaz, A.; Rasool, T.; Rezazadeh, H.; İnç, M. Novel exact and solitary solutions of conformable Klein–Gordon equation via Sardar-subequation method. J. Ocean. Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Wang, K.J.; Si, J.; Wang, G.D.; Shi, F. A new fractal modified Benjamin-Bona-Mahony equation: Its generalized variational principle and abundant exact solutions. Fractals 2023, 31, 2350047. [Google Scholar] [CrossRef]
- Wang, K.J.; Liu, J.H. Diverse optical solitons to the nonlinear Schrödinger equation via two novel techniques. Eur. Phys. J. Plus 2023, 138, 1–9. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D.; Alsaedi, A. Analysis of time-fractional Hunter-Saxton equation: A model of neumatic liquid crystal. Open Phys. 2016, 14, 145–149. [Google Scholar] [CrossRef]
- Atangana, A.; Goufo, E.F.D. Extension of Matched Asymptotic Method to Fractional Boundary Layers Problems. Math. Probl. Eng. 2014, 2014, 107535. [Google Scholar] [CrossRef]
- Guzman, P.; Langton, G.; Lugo, L.; Medina, J.; Valdés, J. A new definition of a fractional derivative of local type. J. Math. Anal. 2018, 9, 88–98. [Google Scholar]
- Martínez, H.; Rezazadeh, H.; Inc, M.; Akinlar, M. New solutions to the fractional perturbed Chen-Lee-Liu equation with a new local fractional derivative. In Waves in Random and Complex Media; Taylor & Francis: Abingdon, UK, 2021; pp. 1–36. [Google Scholar]
- Akram, G.; Sadaf, M.; Atta Ullah Khan, M. Soliton solutions of the resonant nonlinear Schrödinger equation using modified auxiliary equation method with three different nonlinearities. Math. Comput. Simul. 2023, 206, 1–20. [Google Scholar] [CrossRef]
- Akram, G.; Sadaf, M.; Zainab, I. The dynamical study of Biswas-Arshed equation via modified auxiliary equation method. Optik- Int. J. Light Electron Opt. 2022, 255, 168614. [Google Scholar] [CrossRef]
- Akram, G.; Sadaf, M.; Zainab, I. Observations of fractional effects of β-derivative and M-truncated derivative for space time fractional Phi-4 equation via two analytical techniques. Chaos Solitons Fractals 2022, 154, 111645. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akram, G.; Sadaf, M.; Zainab, I.; Abbas, M.; Akgül, A. A Comparative Study of Time Fractional Nonlinear Drinfeld–Sokolov–Wilson System via Modified Auxiliary Equation Method. Fractal Fract. 2023, 7, 665. https://doi.org/10.3390/fractalfract7090665
Akram G, Sadaf M, Zainab I, Abbas M, Akgül A. A Comparative Study of Time Fractional Nonlinear Drinfeld–Sokolov–Wilson System via Modified Auxiliary Equation Method. Fractal and Fractional. 2023; 7(9):665. https://doi.org/10.3390/fractalfract7090665
Chicago/Turabian StyleAkram, Ghazala, Maasoomah Sadaf, Iqra Zainab, Muhammad Abbas, and Ali Akgül. 2023. "A Comparative Study of Time Fractional Nonlinear Drinfeld–Sokolov–Wilson System via Modified Auxiliary Equation Method" Fractal and Fractional 7, no. 9: 665. https://doi.org/10.3390/fractalfract7090665
APA StyleAkram, G., Sadaf, M., Zainab, I., Abbas, M., & Akgül, A. (2023). A Comparative Study of Time Fractional Nonlinear Drinfeld–Sokolov–Wilson System via Modified Auxiliary Equation Method. Fractal and Fractional, 7(9), 665. https://doi.org/10.3390/fractalfract7090665