
A New Optimized FOPIDA-FOIDN Controller for the Frequency Regulation of Hybrid Multi-Area Interconnected Microgrids

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- Proposing the well-structured combination of the fractional-order proportion-integral-derivative-accelerated (FOPIDA) controller in the feed-forward direction and a fractional-order integral-derivative with a low-pass filter compensator (FOIDN) controller in the feedback direction, which is referred to as the FOPIDA-FOIDN controller, as a supplementary (secondary) controller for the secondary LFC in the islanded multi-microgrid.
- Applying a hybrid optimization algorithm, named HGTOEO algorithm, which is a combination of an artificial gorilla forces optimizer (AGTO) and an equilibrium optimizer (EO) to adjust the proposed LFC controller gain of the microgrid.
- Validating the superiority of the proposed HGTOEO by comparative analysis with genetic algorithm (GA), JAYA algorithm, improved JAYA (IJAYA) algorithm, multi-verse optimizer (MVO), and chaotic multi-verse optimizer (CMVO) in a similar structure to the PID controller.
- Validating the superiority of the proposed FOPIDA-FOIDN controller by comparing it to other controllers used in the literature (such as FOPID, TID, and PID controllers) under load/RES fluctuations.
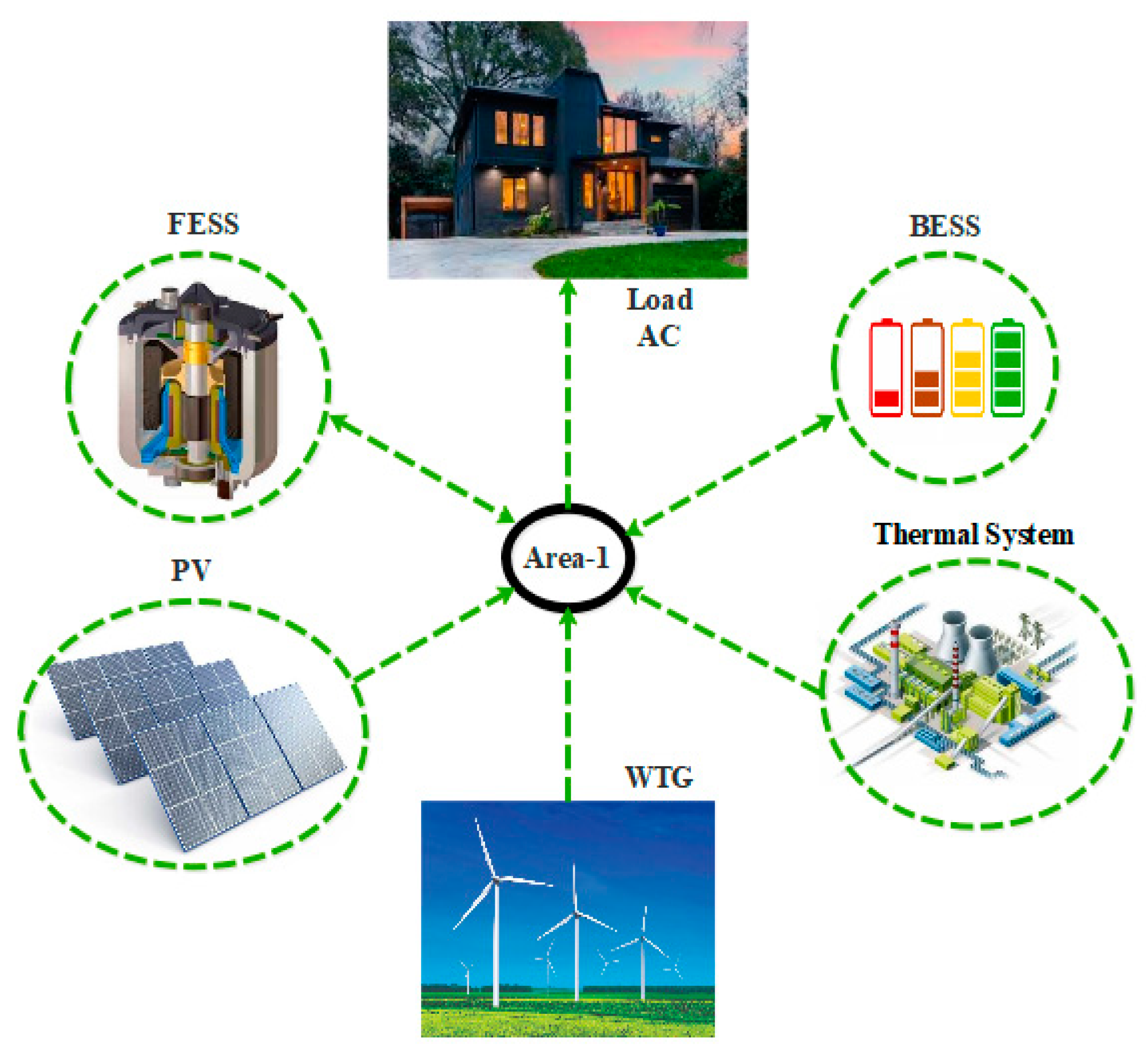
2. Two-Area Interconnected Power System
2.1. Thermal Power Plant Model
2.2. Wind Turbine Model
2.3. Photovoltaic Model
2.4. Energy Storage System
3. Proposed Control System
4. Optimization Technique
4.1. Artificial Gorilla Troops Optimizer
4.1.1. Exploration Phase
4.1.2. Exploitation Phase
4.2. The Equilibrium Optimizer
5. Results and Discussion
5.1. System Performance Evaluation under SLP
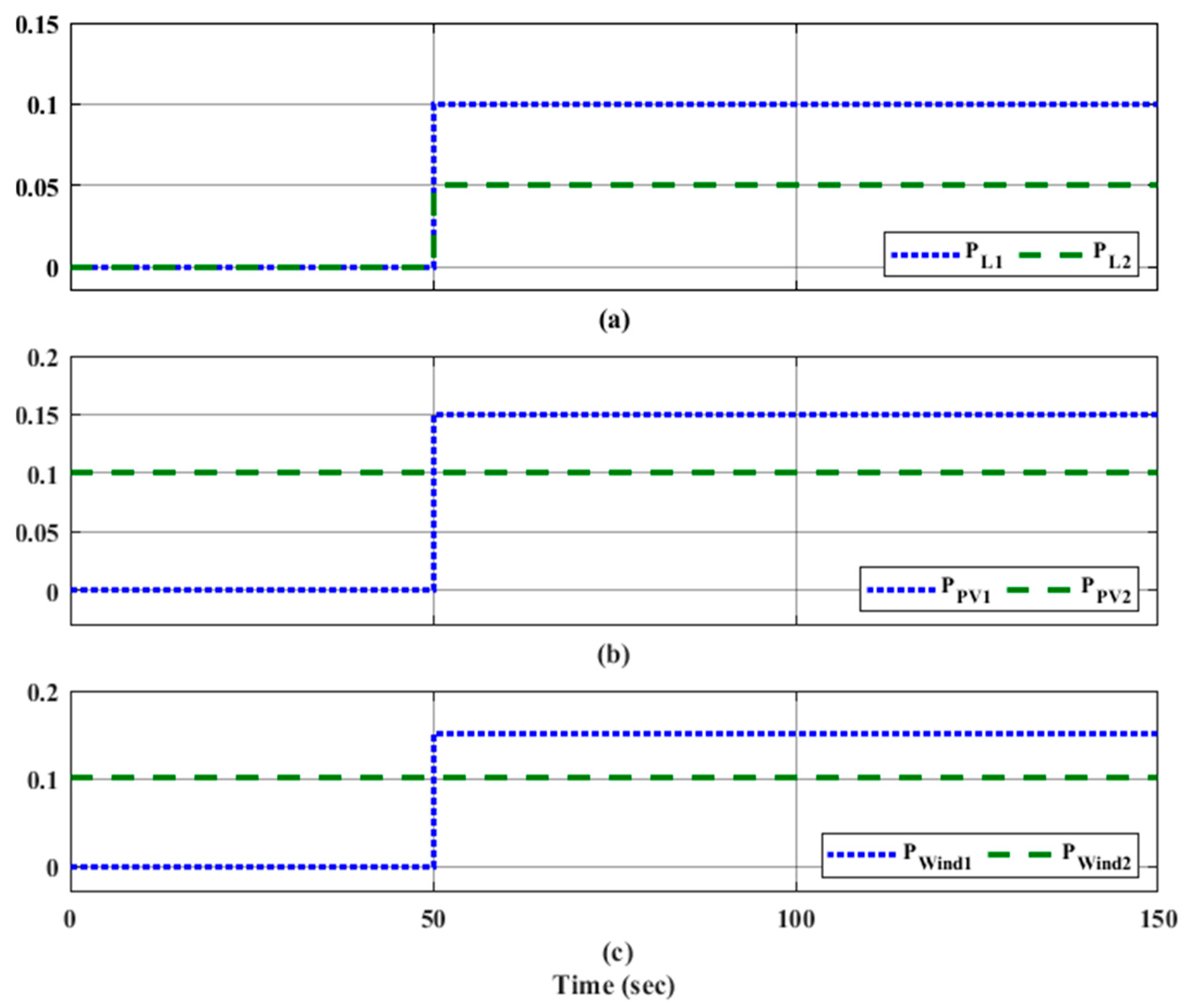
5.2. Second Scenario (Step Change in Load)
5.3. Third Scenario (Robustness to Parameters Change)
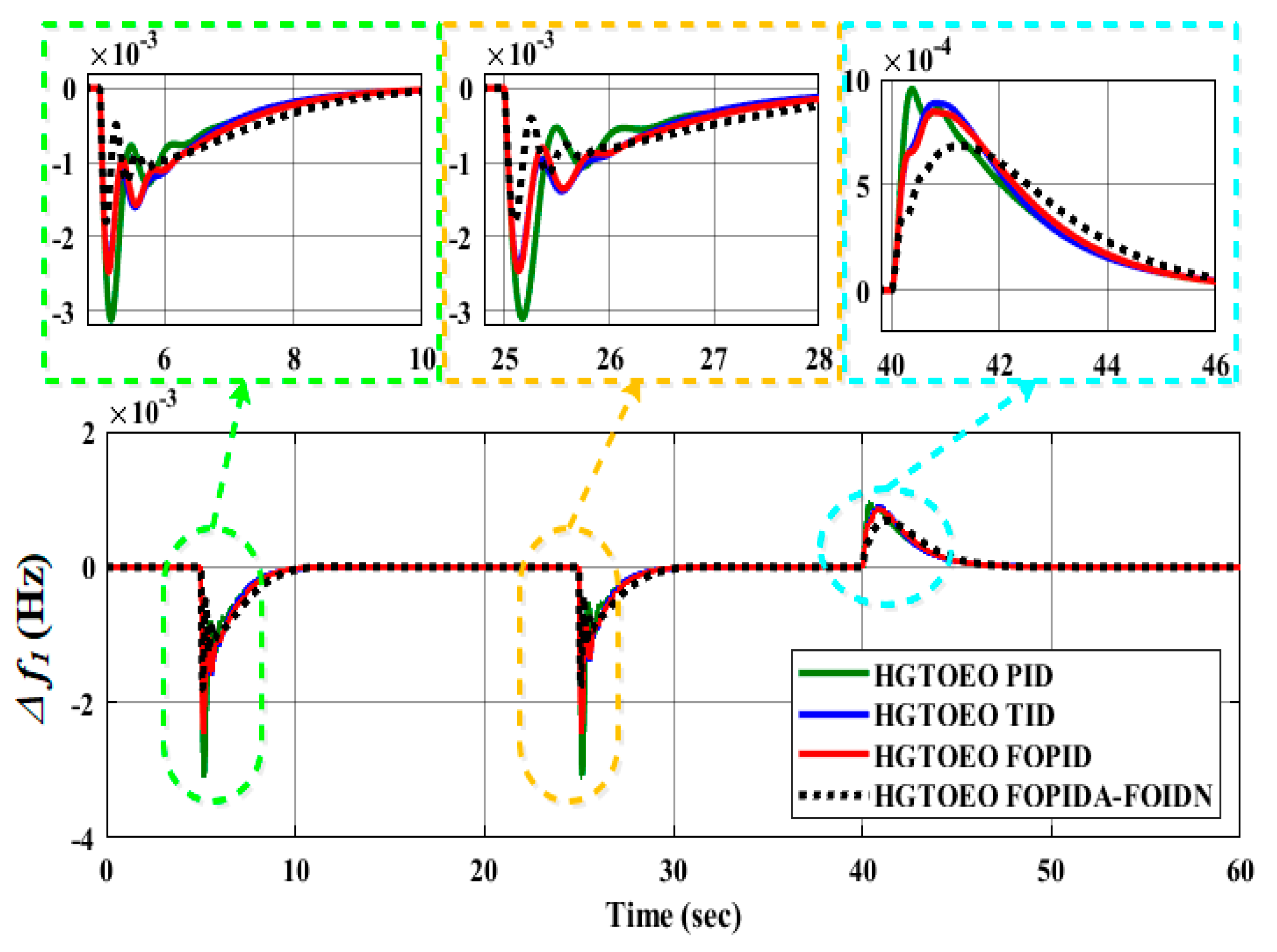
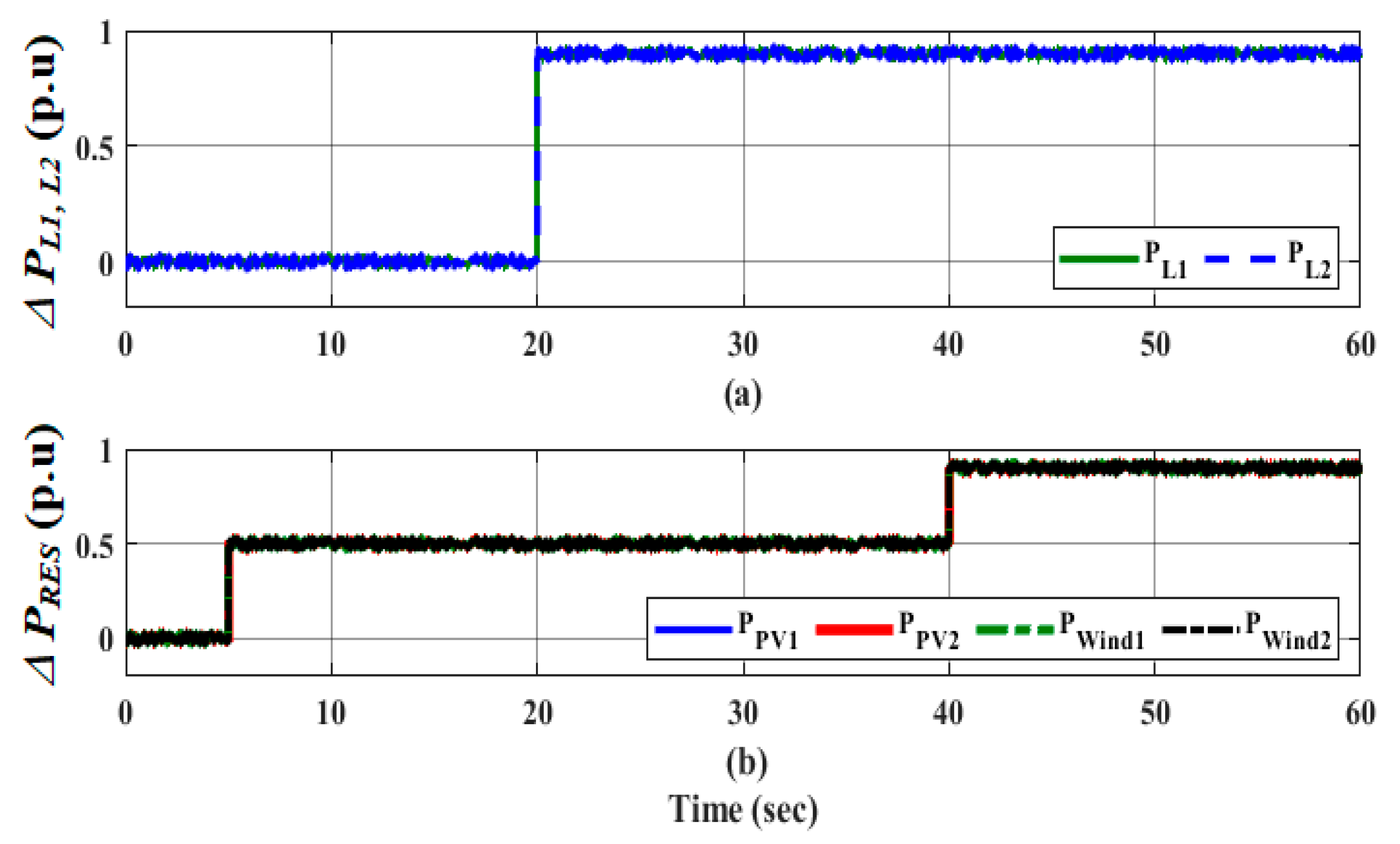
5.4. Fourth Scenario (The Random Step Change in Load and RESs)
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hassan, S.M.U.; Ramli, M.A.M.; Milyani, A.H. Robust Load Frequency Control of Hybrid Solar Power Systems Using Optimization Techniques. Front. Energy Res. 2022, 10, 902776. [Google Scholar] [CrossRef]
- Mohan, A.M.; Meskin, N.; Mehrjerdi, H. A Comprehensive Review of the Cyber-Attacks and Cyber-Security on Load Frequency Control of Power Systems. Energies 2020, 13, 3860. [Google Scholar] [CrossRef]
- Kalyan, C.H.N.S.; Rao, G.S. Impact of communication time delays on combined LFC and AVR of a multi-area hybrid system with IPFC-RFBs coordinated control strategy. Prot. Control Mod. Power Syst. 2021, 6, 7. [Google Scholar] [CrossRef]
- Ahmed, N.M.; Ebeed, M.; Alhejji, A.; Refai, A. A Robust Cascaded Controller for Load Frequency Control in Renewable Energy Integrated Microgrid Containing PEV. Int. J. Renew. Energy Res. 2023, 13, 423–433. [Google Scholar] [CrossRef]
- Ranjan, M.; Shankar, R. A literature survey on load frequency control considering renewable energy integration in power system: Recent trends and future prospects. J. Energy Storage 2022, 45, 103717. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Robust frequency control in a renewable penetrated power system: An adaptive fractional order-fuzzy approach. Prot. Control Mod. Power Syst. 2019, 4, 16. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Coordinated control of conventional power sources and PHEVs using jaya algorithm optimized PID controller for frequency control of a renewable penetrated power system. Prot. Control Mod. Power Syst. 2019, 4, 28. [Google Scholar] [CrossRef]
- Nour, M.; Magdy, G.; Chaves-Ávila, J.P.; Sánchez-Miralles, Á.; Jurado, F. A new two-stage controller design for frequency regulation of low-inertia power system with virtual synchronous generator. J. Energy Storage 2023, 62, 106952. [Google Scholar] [CrossRef]
- Singh, B.; Slowik, A.; Bishnoi, S.K. A Dual-Stage Controller for Frequency Regulation in a Two-Area Realistic Diverse Hybrid Power System Using Bull–Lion Optimization. Energies 2022, 15, 8063. [Google Scholar] [CrossRef]
- Naderipour, A.; Abdul-Malek, Z.; Davoodkhani, I.F.; Kamyab, H.; Ali, R.R. Load-frequency control in an islanded microgrid PV/WT/FC/ESS using an optimal self-tuning fractional-order fuzzy controller. Environ. Sci. Pollut. Res. 2021, 30, 71677–71688. [Google Scholar] [CrossRef]
- Yildiz, S. An Autonomous Frequency Control Mechanism for Multi-Area Microgrids Incorporating with Distributed Energy Resources. Res. Sq. 2022. [Google Scholar] [CrossRef]
- Magdy, G.; Mohamed, E.A.; Shabib, G.; Elbaset, A.A.; Mitani, Y. SMES based a new PID controller for frequency stability of a real hybrid power system considering high wind power penetration. IET Renew. Power Gener. 2018, 12, 1304–1313. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Optimized coordinated control of LFC and SMES to enhance frequency stability of a real multi-source power system considering high renewable energy penetration. Prot. Control Mod. Power Syst. 2018, 3, 39. [Google Scholar] [CrossRef]
- Magdy, G.; Bakeer, A.; Nour, M.; Petlenkov, E. A New Virtual Synchronous Generator Design Based on the SMES System for Frequency Stability of Low-Inertia Power Grids. Energies 2020, 13, 5641. [Google Scholar] [CrossRef]
- Magdy, G.; Mohamed, E.A.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Microgrid dynamic security considering high penetration of renewable energy. Prot. Control Mod. Power Syst. 2018, 3, 23. [Google Scholar] [CrossRef]
- Ali, H.H.; Fathy, A.; Al-Shaalan, A.M.; Kassem, A.M.; Farh, H.M.H.; Al-Shamma’a, A.A.; Gabbar, H.A. A Novel Sooty Terns Algorithm for Deregulated MPC-LFC Installed in Multi-Interconnected System with Renewable Energy Plants. Energies 2021, 14, 5393. [Google Scholar] [CrossRef]
- Kumar, A.; Kumari, N.; Shankar, G.; Elavarasan, R.M.; Kumar, S.; Srivastava, A.K.; Khan, B. Load Frequency Control of Distributed Generators Assisted Hybrid Power System Using QOHSA Tuned Model Predictive Control. IEEE Access 2022, 10, 109311–109325. [Google Scholar] [CrossRef]
- Latif, A.; Das, D.C.; Barik, A.K.; Ranjan, S. Illustration of demand response supported co-ordinated system performance evaluation of YSGA optimized dual stage PIFOD-(1 + PI) controller employed with wind-tidal-biodiesel based independent two-area interconnected microgrid system. IET Renew. Power Gener. 2020, 14, 1074–1086. [Google Scholar] [CrossRef]
- Khan, I.A.; Mokhlis, H.; Mansor, N.N.; Illias, H.A.; Awalin, L.J.; Wang, L. New trends and future directions in load frequency control and flexible power system: A comprehensive review. Alex. Eng. J. 2023, 71, 263–308. [Google Scholar] [CrossRef]
- Kumar, S.; Anwar, N. Fractional order PID Controller design for Load Frequency Control in Parallel Control Structure. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Choudhary, A.K.; Prakash, S.; Sharma, M.; Dhundhara, S. Grasshopper optimisation based robust power/frequency regulator for shipboard micro-grid. IET Renew. Power Gener. 2020, 14, 3568–3577. [Google Scholar] [CrossRef]
- Abdel-Hamed, A.M.; Abdelaziz, A.Y.; El-Shahat, A. Design of a 2DOF-PID Control Scheme for Frequency/Power Regulation in a Two-Area Power System Using Dragonfly Algorithm with Integral-Based Weighted Goal Objective. Energies 2023, 16, 486. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Murawwat, S.; Sibtain, D.; Shahid, K.; Javed, I.; Gui, Y. Modified Cascaded Controller Design Constructed on Fractional Operator ‘β’ to Mitigate Frequency Fluctuations for Sustainable Operation of Power Systems. Energies 2022, 15, 7814. [Google Scholar] [CrossRef]
- Chen, M.-R.; Zeng, G.-Q.; Dai, Y.-X.; Lu, K.-D.; Bi, D.-Q. Fractional-Order Model Predictive Frequency Control of an Islanded Microgrid. Energies 2018, 12, 84. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.-H.; Dragicevic, T. The Future 5G Network-Based Secondary Load Frequency Control in Shipboard Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 836–844. [Google Scholar] [CrossRef]
- Sabahi, K.; Tavan, M.; Hajizadeh, A. Adaptive type-2 fuzzy PID controller for LFC in AC microgrid. Soft Comput. 2021, 25, 7423–7434. [Google Scholar] [CrossRef]
- Badavath, S.; Rai, A.; Das, D.K. Class Topper Optimization based Fuzzy-PI Controller Design to Solve Load Frequency Control in Microgrids. In Proceedings of the 2021 International Symposium of Asian Control Association on Intelligent Robotics and Industrial Automation (IRIA), Goa, India, 20–22 September 2021; pp. 113–118. [Google Scholar] [CrossRef]
- Golkhandan, R.K.; Torkaman, H.; Aghaebrahimi, M.R.; Keyhani, A. Load frequency control of smart isolated power grids with high wind farm penetrations. IET Renew. Power Gener. 2020, 14, 1228–1238. [Google Scholar] [CrossRef]
- Bhullar, A.K.; Kaur, R.; Sondhi, S. Design of FOPID Controller for Optimizing AVR System using Neural Network Algorithm. In Proceedings of the 2020 IEEE 17th India Council International Conference (INDICON), New Delhi, India, 10–13 December 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Fathy, A.; Kassem, A.M. Antlion optimizer-ANFIS load frequency control for multi-interconnected plants comprising photovoltaic and wind turbine. ISA Trans. 2018, 87, 282–296. [Google Scholar] [CrossRef]
- Karimipouya, A.; Karimi, S.; Abdi, H. Microgrid frequency control using the virtual inertia and ANFIS-based Controller. Int. J. Ind. Electron. Control Optim. 2019, 2, 145–154. [Google Scholar] [CrossRef]
- Akula, S.K.; Salehfar, H. Frequency Control in Microgrid Communities Using Neural Networks. In Proceedings of the 2019 North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Z.; Sun, Y.; Guo, Y.; Fang, C.; Li, M.; Sun, Y. Optimal Control Design for Load Frequency Control with Network-induced Delays. In Proceedings of the 2020 IEEE 3rd International Conference on Electronic Information and Communication Technology (ICEICT), Shenzhen, China, 13–15 November 2020; pp. 664–669. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Secondary load frequency control for multi-microgrids: HiL real-time simulation. Soft Comput. 2018, 23, 5785–5798. [Google Scholar] [CrossRef]
- Sahoo, B.P.; Panda, S. Chaotic multi verse optimizer based fuzzy logic controller for frequency control of microgrids. Evol. Intell. 2021, 14, 1597–1618. [Google Scholar] [CrossRef]
- Mahto, T.; Malik, H.; Mukherjee, V.; Alotaibi, M.A.; Almutairi, A. Renewable generation based hybrid power system control using fractional order-fuzzy controller. Energy Rep. 2021, 7, 641–653. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; AboRas, M.K.; Abbasy, H.N. Frequency regulation of hybrid multi-area power system using wild horse optimizer based new combined Fuzzy Fractional-Order PI and TID controllers. Alex. Eng. J. 2022, 61, 12187–12210. [Google Scholar] [CrossRef]
- Sayed, G.I.; Hassanien, A.E. A Novel Chaotic Artificial Gorilla Troops Optimizer and Its Application for Fundus Images Segmentation. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2021, Cairo, Egypt, 11–13 December 2021; Hassanien, A.E., Snášel, V., Chang, K.C., Darwish, A., Gaber, T., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 318–329. [Google Scholar]
- Ginidi, A.; Ghoneim, S.M.; Elsayed, A.; El-Sehiemy, R.; Shaheen, A.; El-Fergany, A. Gorilla Troops Optimizer for Electrically Based Single and Double-Diode Models of Solar Photovoltaic Systems. Sustainability 2021, 13, 9459. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Mirjalili, S. Artificial gorilla troops optimizer: A new nature-inspired metaheuristic algorithm for global optimization problems. Int. J. Intell. Syst. 2021, 36, 5887–5958. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Area (1) | Area (2) |
|---|---|---|---|
| Speed governor time constant (s) | 0.1 | 0.1 | |
| Governor gain constant (p.u.) | 1 | 1 | |
| Time constant of the turbine (s) | 0.4 | 0.4 | |
| Turbine gain constant (p.u.) | 1 | 1 | |
| Speed regulation constant (p.u.) | 0.05 | 0.04 | |
| Frequency bias constant (p.u.) | 10 | 12.5 | |
| Inertia constant (p.u.) | 8 | 8 | |
| Damping constant (p.u.) | 1 | 1 | |
| Gain constant of PV (p.u.) | 1 | 1 | |
| Gain constant of WT (p.u.) | 1 | 1 | |
| Time constant of PV (s) | 1.5 | 1.5 | |
| Time constant of WT (s) | 0.5 | 0.5 | |
| Gain constant of BESS (p.u.) | −3 | −4 | |
| Time constant of BESS (s) | 0.1 | 0.1 | |
| Gain constant of FESS (p.u.) | −1.5 | −2 | |
| Time constant of FESS (s) | 0.1 | 0.1 | |
| Synchronizing coefficient | 0.7 | 0.7 |
| Controllers’ Parameters | PID-Based HGTOEO (Proposed) | PID_IJAYA [34] | PID_JAYA [34] | PID_GA [34] | PID_MVO [35] | PID_CMVO [35] | |
|---|---|---|---|---|---|---|---|
| Area (1) | Kp1 | 17.9386 | 2.8779 | 1.8498 | 2.7143 | 2.2806 | 2.9996 |
| Ki1 | 19.9997 | 3 | 3 | 3 | 2.9987 | 2.9997 | |
| Kd1 | 4.1309 | 0.5739 | 0.9657 | 1.8664 | 1.2910 | 1.4982 | |
| Area (2) | Kp2 | 6.7876 | 1.8406 | 1.0135 | 1.7822 | 1.2987 | 1.8834 |
| Ki2 | 8.4669 | 2.4149 | 2.4160 | 2.3317 | 2.4003 | 2.4010 | |
| Kd2 | 2.1085 | 0.4377 | 0.7498 | 1.6924 | 0.9805 | 1.1546 | |
| ITAE | 0.1036 | 2.0444 | 2.0892 | 2.5021 | 2.0365 | 2.0215 | |
| Controllers’ Parameters | FOPIDA-FOIDN | FOPID | TID | PID | |
|---|---|---|---|---|---|
| Area (1) | Kp11 | 7.9783 | 20 | -- | 17.9386 |
| Kt11 | -- | -- | 18.5412 | -- | |
| Ki11 | 20 | 19.9999 | 19.9999 | 19.9996 | |
| Kd11 | 20 | 6.8625 | 7.2759 | 4.1309 | |
| Ka11 | 12.6209 | -- | -- | -- | |
| Ki12 | 0.0029 | -- | -- | -- | |
| Kd12 | 0.0012 | -- | -- | -- | |
| λ11 | 1 | 0.9999 | -- | -- | |
| μ11 | 0.0010 | 0.9999 | -- | -- | |
| V11 | 0.9999 | -- | -- | -- | |
| λ12 | 0.4264 | -- | -- | -- | |
| N11 | 0.9999 | -- | 19.9999 | -- | |
| μ12 | 0.9999 | -- | -- | -- | |
| Area (2) | Kp21 | 9.8479 | 6.8150 | -- | 6.7876 |
| Kt21 | -- | -- | 6.3068 | -- | |
| Ki21 | 9.6627 | 8.1406 | 8.1569 | 8.4669 | |
| Kd21 | 0.0016 | 2.6381 | 2.7686 | 2.1085 | |
| Ka21 | 4.8288 | -- | -- | -- | |
| Ki22 | 19.9999 | -- | -- | -- | |
| Kd22 | 20 | -- | -- | -- | |
| λ21 | 1 | 1 | -- | -- | |
| μ21 | 0.0011 | 0.9973 | -- | -- | |
| V21 | 0.9999 | -- | -- | -- | |
| λ22 | 1 | -- | -- | -- | |
| N21 | 0.0012 | -- | 18.0915 | -- | |
| μ22 | 1 | -- | -- | -- | |
| ITAE | 0.0636 | 0.0986 | 0.0987 | 0.1037 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, N.M.; Ebeed, M.; Magdy, G.; Sayed, K.; Gamoura, S.C.; Metwally, A.S.M.; A. Mahmoud, A. A New Optimized FOPIDA-FOIDN Controller for the Frequency Regulation of Hybrid Multi-Area Interconnected Microgrids. Fractal Fract. 2023, 7, 666. https://doi.org/10.3390/fractalfract7090666
Ahmed NM, Ebeed M, Magdy G, Sayed K, Gamoura SC, Metwally ASM, A. Mahmoud A. A New Optimized FOPIDA-FOIDN Controller for the Frequency Regulation of Hybrid Multi-Area Interconnected Microgrids. Fractal and Fractional. 2023; 7(9):666. https://doi.org/10.3390/fractalfract7090666
Chicago/Turabian StyleAhmed, Nessma M., Mohamed Ebeed, Gaber Magdy, Khairy Sayed, Samia Chehbi Gamoura, Ahmed Sayed M. Metwally, and Alaa A. Mahmoud. 2023. "A New Optimized FOPIDA-FOIDN Controller for the Frequency Regulation of Hybrid Multi-Area Interconnected Microgrids" Fractal and Fractional 7, no. 9: 666. https://doi.org/10.3390/fractalfract7090666
APA StyleAhmed, N. M., Ebeed, M., Magdy, G., Sayed, K., Gamoura, S. C., Metwally, A. S. M., & A. Mahmoud, A. (2023). A New Optimized FOPIDA-FOIDN Controller for the Frequency Regulation of Hybrid Multi-Area Interconnected Microgrids. Fractal and Fractional, 7(9), 666. https://doi.org/10.3390/fractalfract7090666