

Real-Time Synchronisation of Multiple Fractional-Order Chaotic Systems: An Application Study in Secure Communication

 , , , and
, , , and 
Abstract
:1. Introduction
- -
- The computation of the fractional order in the microcontroller needs memory allocation to compute the cumulative integration; this limitation in the memory of the atmega328p microcontroller was solved by using the numerical approximation method, Rung Kutta 4.
- -
- The noise produced by the electronics components, which negatively affects the quality of the transmitted and received data, was solved in two ways: two capacitors were added to the circuit to enhance the NRF24LO1 module’s performance, and a stochastic filter was implemented to filter the estimated input (message) in the slave part.
- -
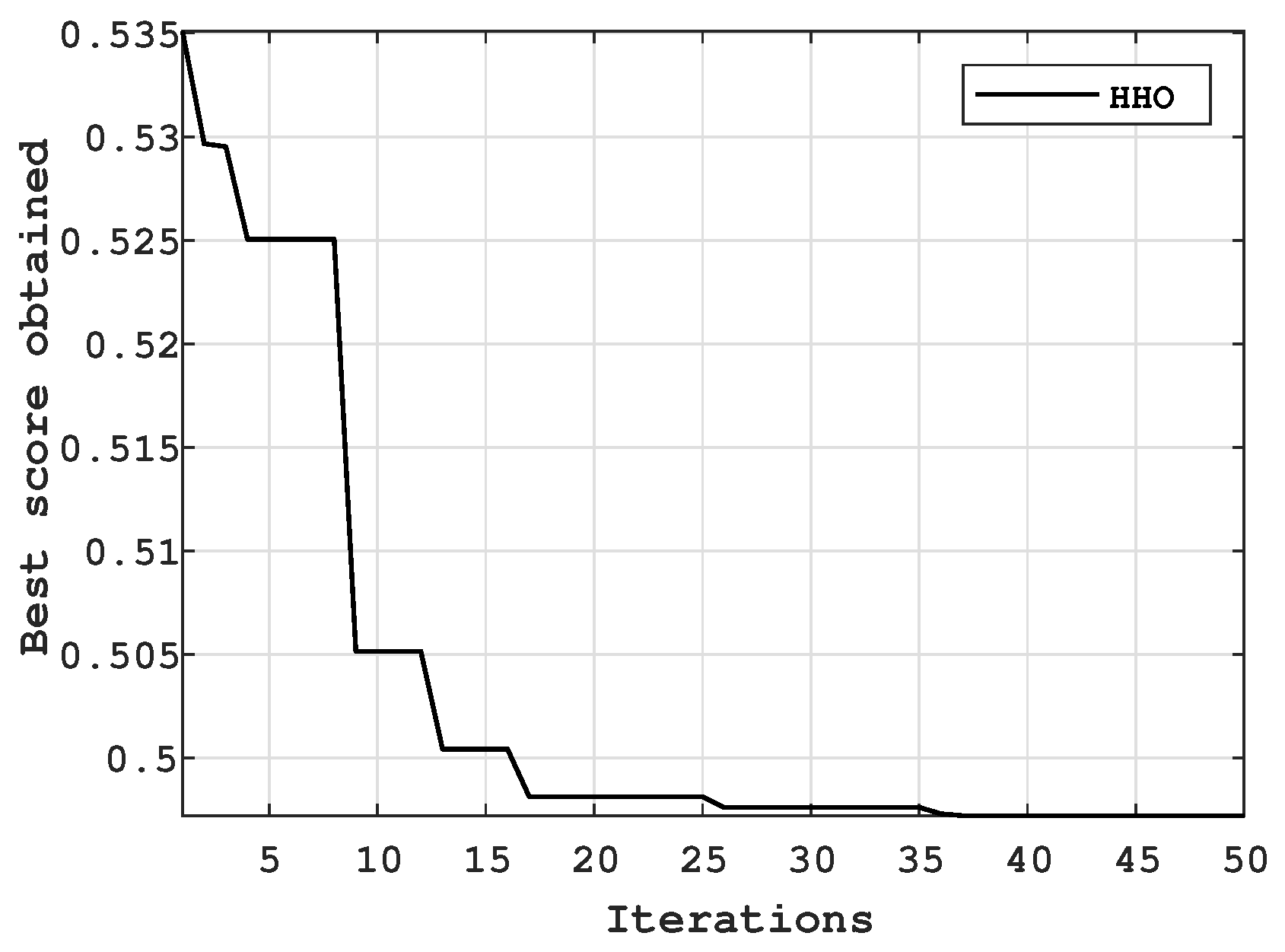
- The optimal SBS-SMO parameters were chosen using HHO.
2. Fundamental on Fractional Calculus
3. The Transmitter System’s Configuration
The Inclusion of Private Information
4. SBS-SMO Theory
5. The Receiver System’s Configuration
6. Selection of the Observer’s Optimal Parameters via HHO
7. Results and Discussion
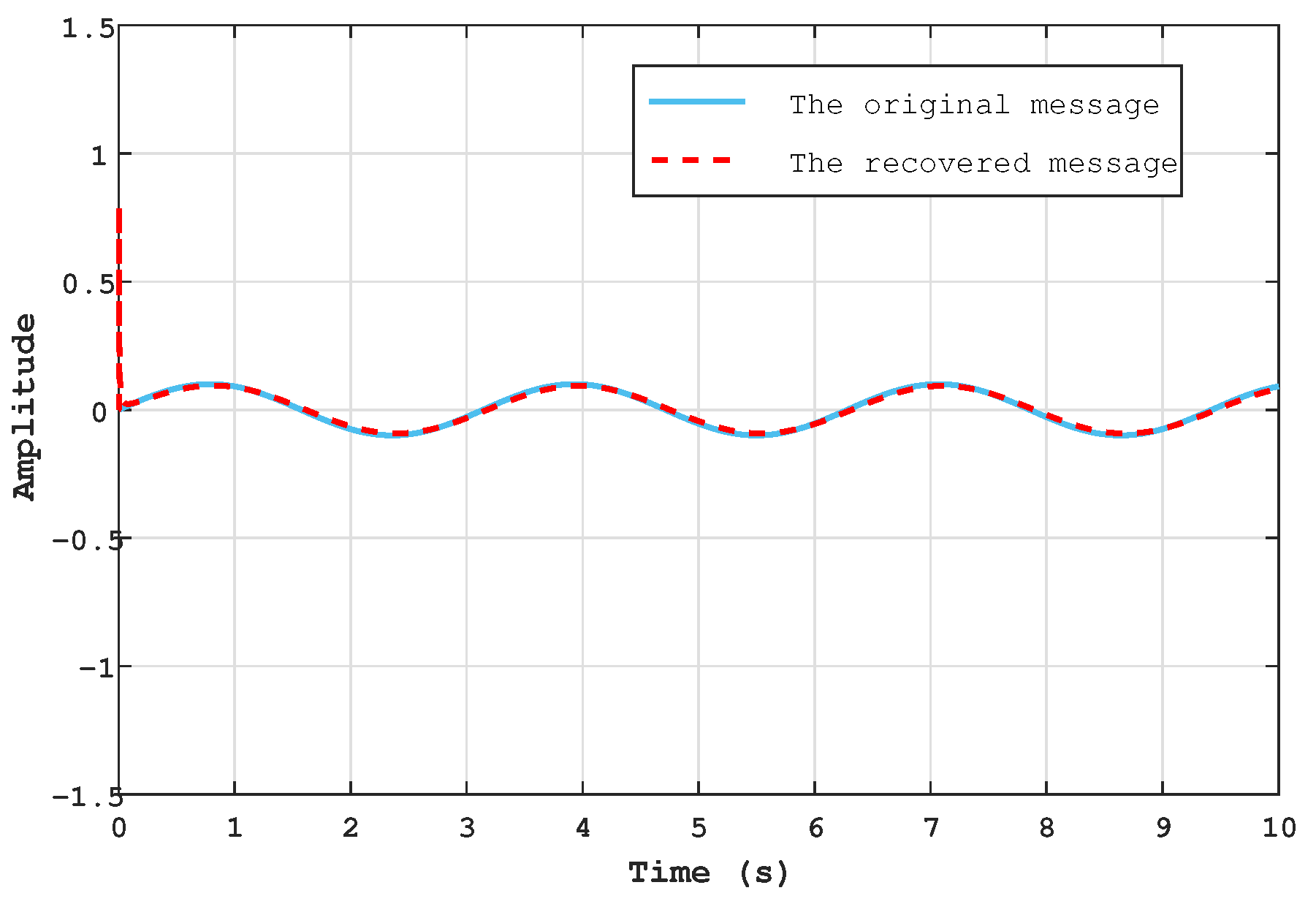
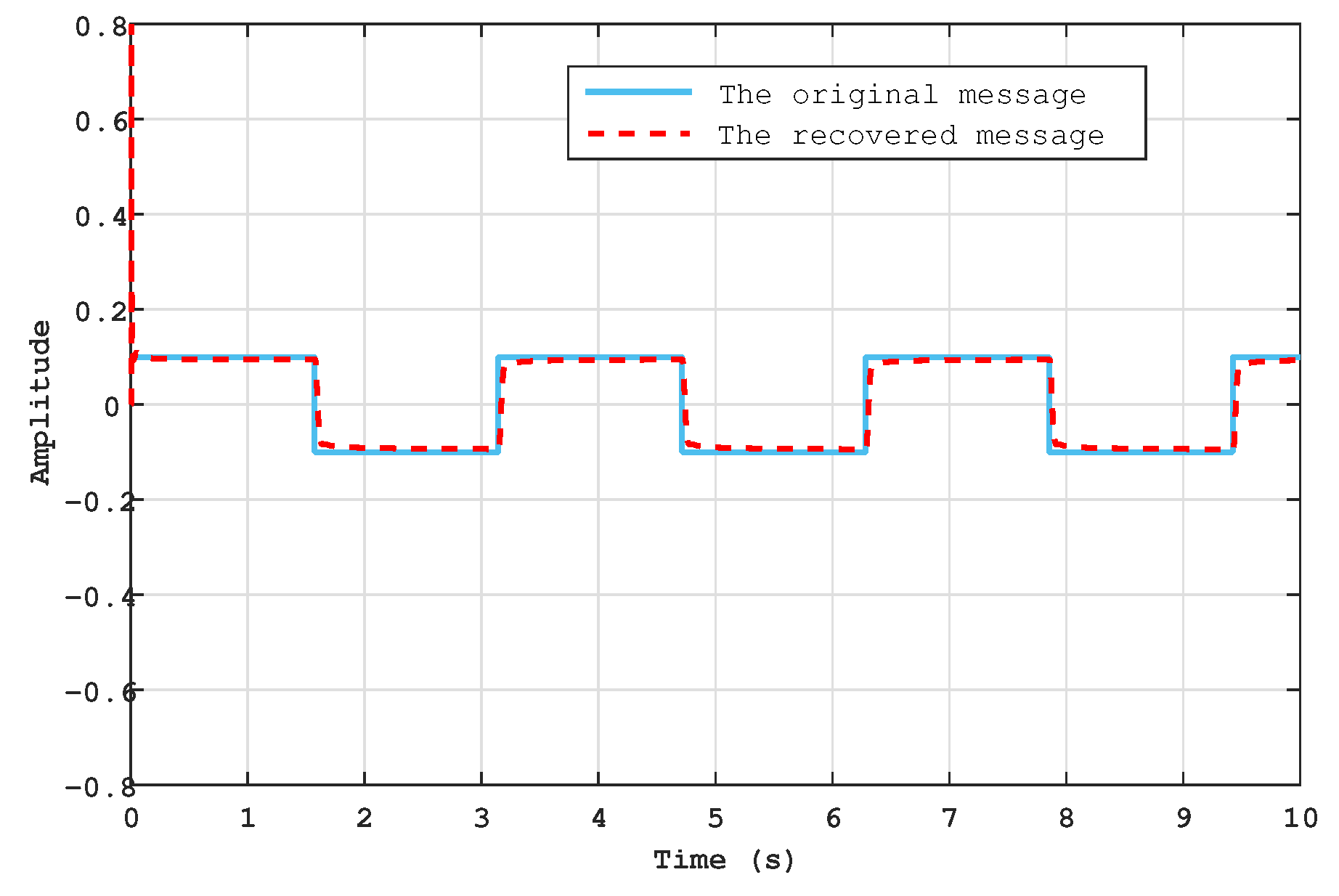
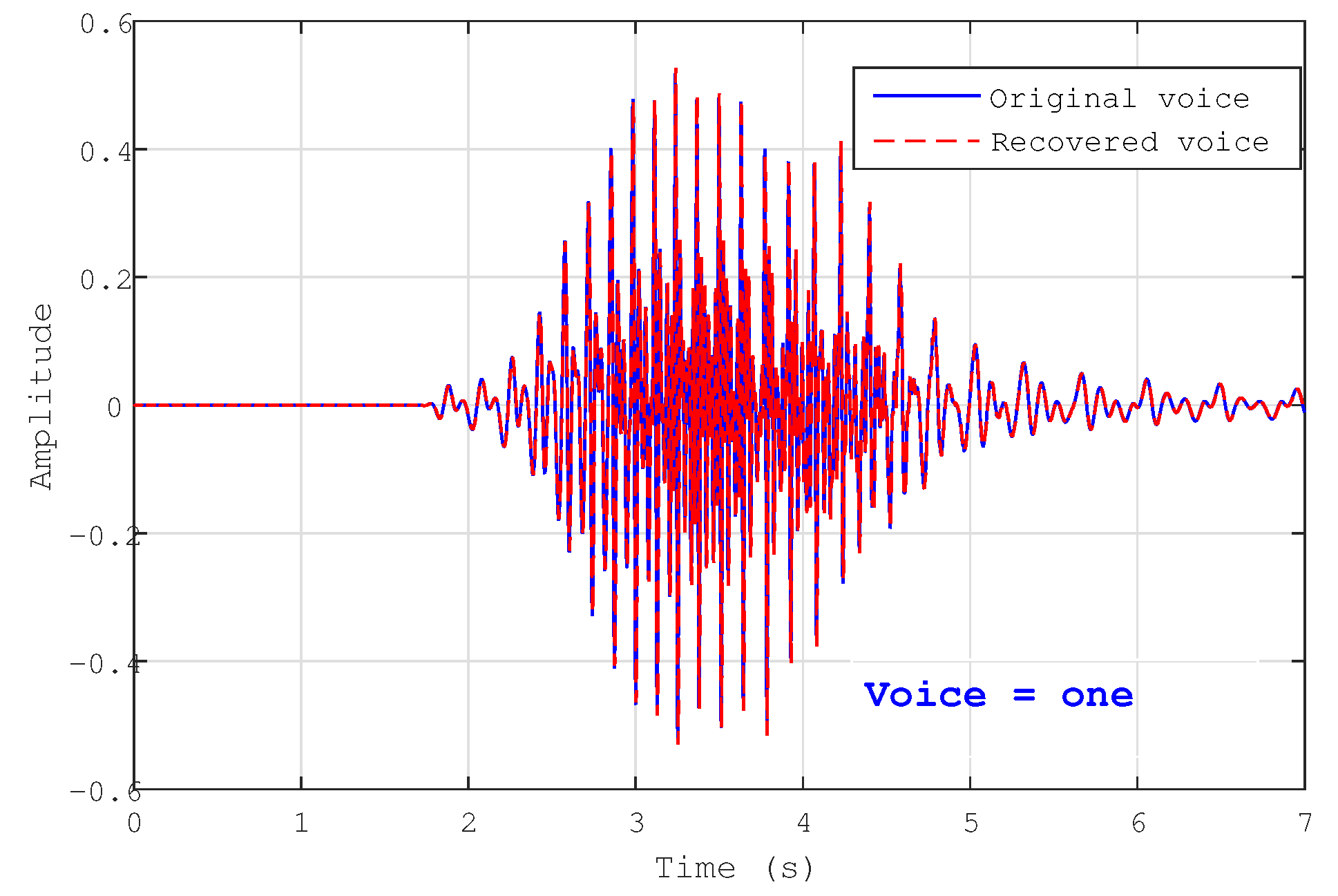
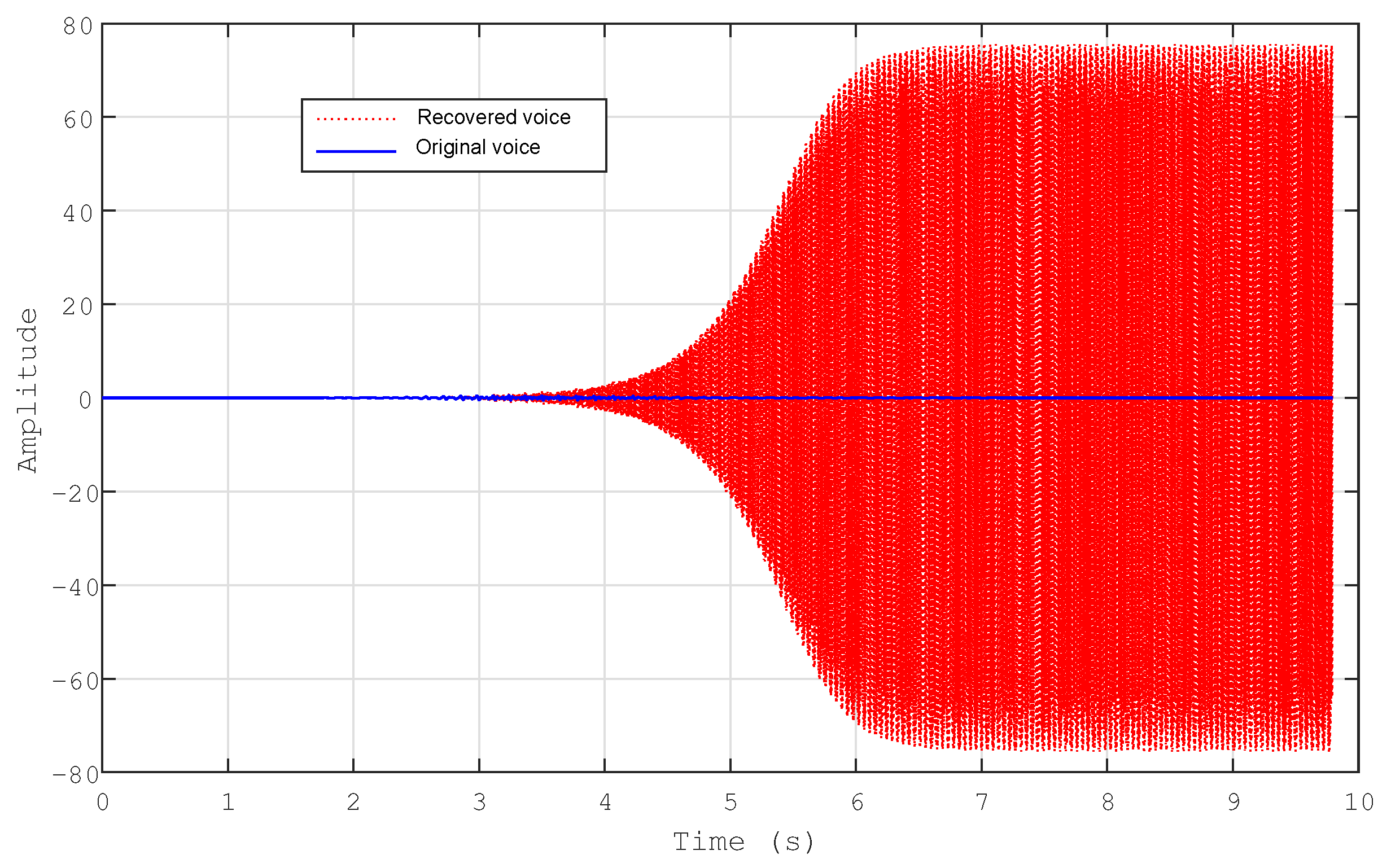
7.1. Retrieving the Secret Message
7.2. Security Analysis and Check
7.3. Experimental Validation
8. Conclusions
- The type of chaotic system utilised, such as Lorenz, Rossler, Chua’s, and Chen, among others.
- The dynamic parameters of the chaotic system.
- The order and initial conditions of the system, as well as the state in which the message was embedded.
- The mechanism of the synchronisation process, such as a controller or observer, and the specific type of controller or observer.
- The characteristics of the encrypted and decrypted data, such as text, images, voice, and video.
- Transmitting secure images instead of voice or signal data.
- Improving fractional Chua’s systems through real-time implementation of new 4D or 6D fractional chaotic systems.
- Replacing the synchronisation observer with advanced and more recent algorithms such as deep learning and machine learning approaches.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oldham, K.B. Fractional differential equations in electrochemistry. Adv. Eng. Softw. 2010, 41, 9–12. [Google Scholar] [CrossRef]
- Giona, M.; Cerbelli, S.; Roman, H.E. Fractional diffusion equation and relaxation in complex viscoelastic materials. Phys. A Stat. Mech. Its Appl. 1992, 91, 449–453. [Google Scholar] [CrossRef]
- Ionescu, C.; Lopes, A.; Copot, D.; Machado, J.A.T.; Bates, J.H.T. The role of fractional calculus in modeling biological phenomena: A review. Commun. Nonlinear Sci. Numer. Simul. 2017, 51, 141–159. [Google Scholar] [CrossRef]
- Morales-Delgado, V.F.; Gómez-Aguilar, J.F.; Saad, K.M.; Khan, M.A.; Agarwal, P. Analytic solution for oxygen diffusion from capillary to tissues involving external force effects: A fractional calculus approach. Phys. A Stat. Mech. Its Appl. 2019, 523, 48–65. [Google Scholar] [CrossRef]
- El-Sayed, A.A.; Agarwal, P. Numerical solution of multiterm variable-order fractional differential equations via shifted Legendre polynomials. Math. Methods Appl. Sci. 2019, 42, 3978–3991. [Google Scholar] [CrossRef]
- Rekhviashvili, S.; Pskhu, A.; Agarwal, P.; Jain, S. Application of the fractional oscillator model to describe damped vibrations. Turk. J. Phys. 2019, 43, 236–242. [Google Scholar] [CrossRef]
- Atoussi, M.A.; Saadi, S.; Nail, B. Design of an optimal step-by-step sliding mode observer for multiple fractional-order chaotic synchronisation with an application to secure communication. Int. J. Appl. Nonlinear Sci. 2023, 4, 58–71. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G.; Cheng, D.; Celikovsky, S. Bridge the gap between the Lorenz system and the Chen system. Int. J. Bifurc. Chaos 2002, 12, 2917–2926. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Rössler, O.E. An equation for continuous chaos. Phys. Lett. A 1976, 57, 397–398. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef]
- Pellicer-Lostao, C.; López-Ruiz, R. A chaotic gas-like model for trading markets. J. Comput. Sci. 2010, 1, 24–32. [Google Scholar] [CrossRef]
- Ditto, W.L. Applications of chaos in biology and medicine. AIP Conf. Proc. 1996, 376, 175–201. [Google Scholar]
- Bodnar, M.; Foryś, U. Three types of simple DDE’s describing tumor growth. J. Biol. Syst. 2007, 15, 453–471. [Google Scholar] [CrossRef]
- Lamba, P.; Hudson, J.L. Experiments on bifurcations to chaos in a forced chemical reactor. Chem. Eng. Sci. 1987, 42, 1–8. [Google Scholar] [CrossRef]
- Yang, T.; Chua, L.O. Secure communication via chaotic parameter modulation. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1996, 43, 817–819. [Google Scholar] [CrossRef]
- Delavari, H.; Mohadeszadeh, M. Robust finite-time synchronization of non-identical fractional-order hyperchaotic systems and its application in secure communication. IEEE/CAA J. Autom. Sin. 2016, 6, 228–235. [Google Scholar] [CrossRef]
- Tian, X.; Fei, S.; Chai, L. On modified second-order sliding mode synchronization of two different fractional order hyperchaotic systems. Int. J. Multimed. Ubiquitous Eng. 2015, 10, 387–398. [Google Scholar] [CrossRef]
- Durga, N.; Muthukumar, P.; Niezabitowski, M. Approximation and convergence analysis of optimal control for non-instantaneous impulsive fractional evolution hemivariational inequalities. Results Control Optim. 2022, 9, 1–20. [Google Scholar] [CrossRef]
- Meng, F.; Gu, Z. A Color Image-Encryption Algorithm Using Extended DNA Coding and Zig-Zag Transform Based on a Fractional-Order Laser System. Fractal Fract. 2023, 7, 795. [Google Scholar] [CrossRef]
- Roohi, M.; Zhang, C.; Taheri, M.; Basse-O’Connor, A. Synchronization of Fractional-Order Delayed Neural Networks Using Dynamic-Free Adaptive Sliding Mode Control. Fractal Fract. 2023, 7, 682. [Google Scholar] [CrossRef]
- Feng, W.; Wang, Q.; Liu, H.; Ren, Y.; Zhang, J.; Zhang, S.; Qian, K.; Wen, H. Exploiting Newly Designed Fractional-Order 3D Lorenz Chaotic System and 2D Discrete Polynomial Hyper-Chaotic Map for High-Performance Multi-Image Encryption. Fractal Fract. 2023, 7, 887. [Google Scholar] [CrossRef]
- Trigeassou, J.-C.; Maamri, N. Modeling and Initialization of Nonlinear and Chaotic Fractional Order Systems Based on the Infinite State Representation. Fractal Fract. 2023, 7, 713. [Google Scholar] [CrossRef]
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Bettayeb, M.; Al–Saggaf, U.M.; Djennoune, S. Single channel secure communication scheme based on synchronization of fractional-order chaotic Chua’s systems. Trans. Inst. Meas. Control 2018, 40, 3651–3664. [Google Scholar] [CrossRef]
- Barbot, J.P.; Djemai, M.; Boukhobza, T. Sliding mode observers. Sliding Mode Control Eng. 2002, 11, 33. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | R | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Value | 0.9 | 1.5 | −1 | 0.0035 | 100 | 1 | 1 | 0.1 | 0.0005 |
| Parameters | Values |
|---|---|
| Search agents | 15 |
| Max iteration | 50 |
| Parameters [μ1 μ2 μ3] |
| Methods | Sin Message | Square Message | Sawtooth Message | Voice Message |
|---|---|---|---|---|
| Proposed | ||||
| [26] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nail, B.; Atoussi, M.A.; Saadi, S.; Tibermacine, I.E.; Napoli, C. Real-Time Synchronisation of Multiple Fractional-Order Chaotic Systems: An Application Study in Secure Communication. Fractal Fract. 2024, 8, 104. https://doi.org/10.3390/fractalfract8020104
Nail B, Atoussi MA, Saadi S, Tibermacine IE, Napoli C. Real-Time Synchronisation of Multiple Fractional-Order Chaotic Systems: An Application Study in Secure Communication. Fractal and Fractional. 2024; 8(2):104. https://doi.org/10.3390/fractalfract8020104
Chicago/Turabian StyleNail, Bachir, Mahedi Abdelghani Atoussi, Slami Saadi, Imad Eddine Tibermacine, and Christian Napoli. 2024. "Real-Time Synchronisation of Multiple Fractional-Order Chaotic Systems: An Application Study in Secure Communication" Fractal and Fractional 8, no. 2: 104. https://doi.org/10.3390/fractalfract8020104
APA StyleNail, B., Atoussi, M. A., Saadi, S., Tibermacine, I. E., & Napoli, C. (2024). Real-Time Synchronisation of Multiple Fractional-Order Chaotic Systems: An Application Study in Secure Communication. Fractal and Fractional, 8(2), 104. https://doi.org/10.3390/fractalfract8020104