
A Novel Link Failure Detection and Switching Algorithm for Dissimilar Redundant UAV Communication



Abstract
:1. Introduction
1.1. Background
1.2. Objective
1.3. Analysis of Yonah’s Software
1.4. Existing Research on Reliable UAV Communication
2. Materials and Methods
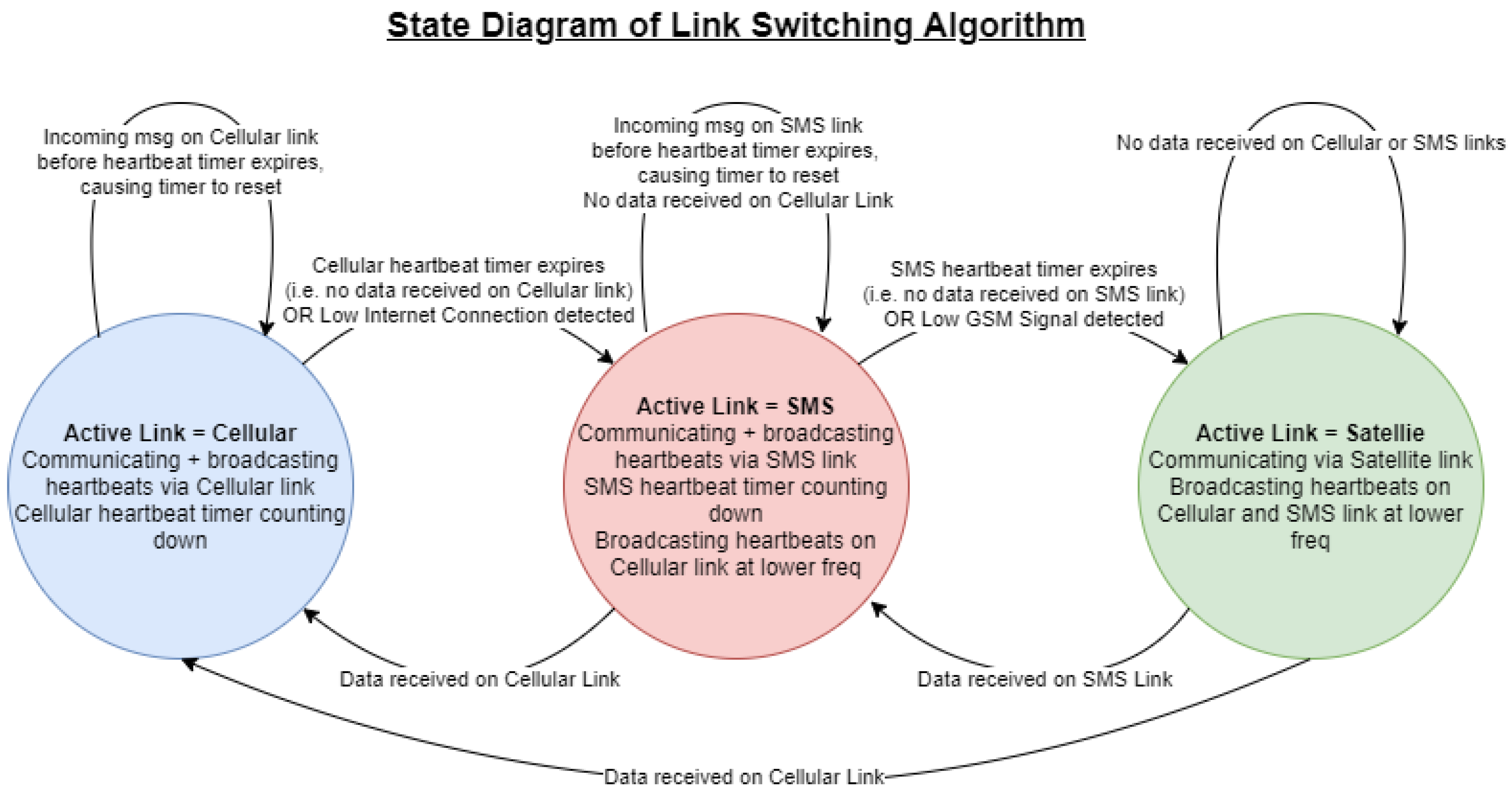
2.1. Algorithm Design
- A baseline layer based on the heartbeat method, to detect both local and remote failure.
- Optimisations based on link signal strength, to speed up detection of local failure.
2.2. Parameter Tuning
- When no TT samples are taken yet.
- Upon receiving the first TT sample.
2.3. Lab Simulations
- All three links in Yonah’s communication system would have similar heartbeat timeout calculation behaviour when subjected to Jacobson’s algorithm. To save time, only the cellular data link was tested.
- The actual latency of the physical environment was negligible compared to the simulated latency.
- The clock granularity was set to 1 s.
- Values were specified for and .
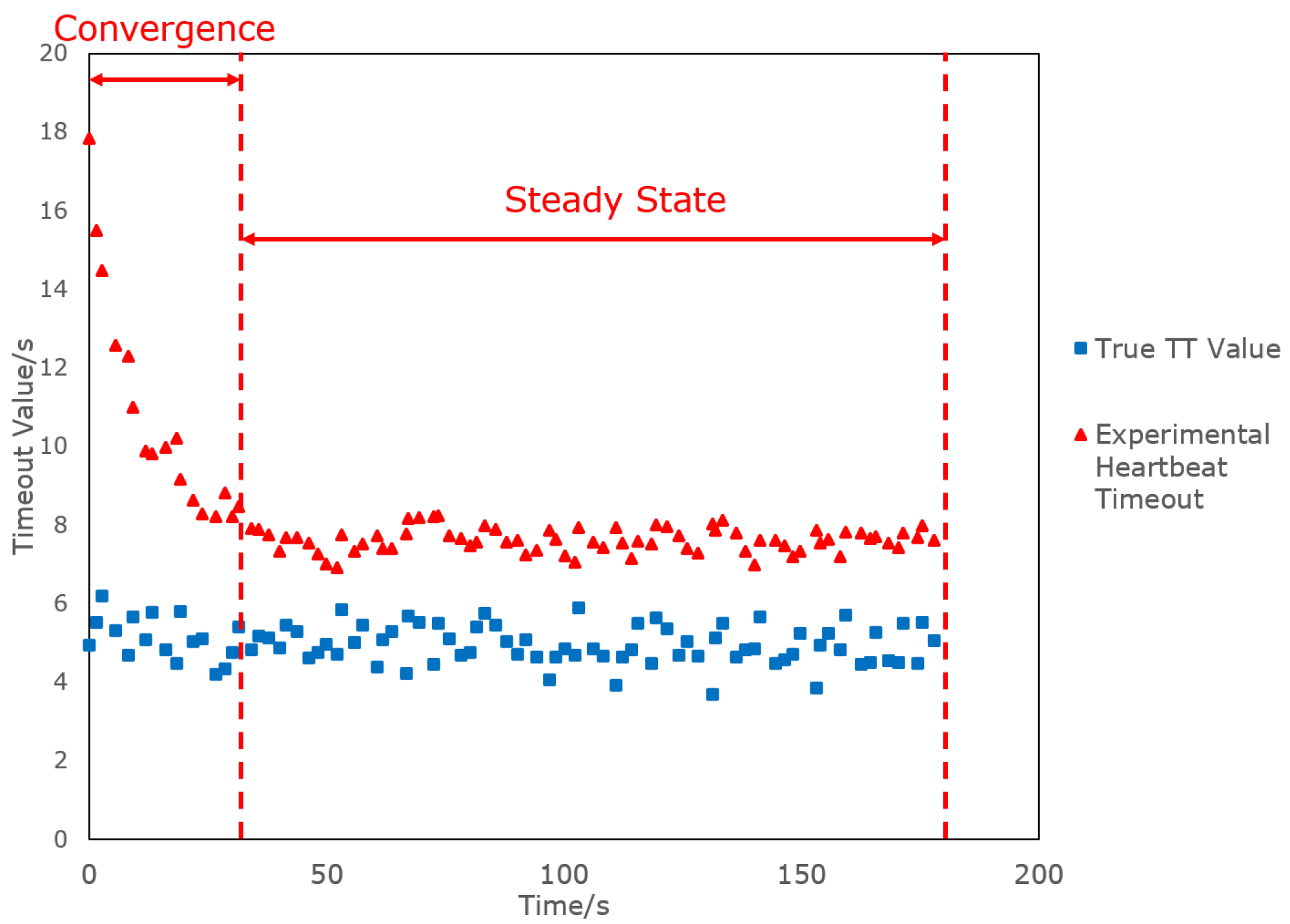
- Both air and ground were left to communicate with each other over the cellular link for 3 min.
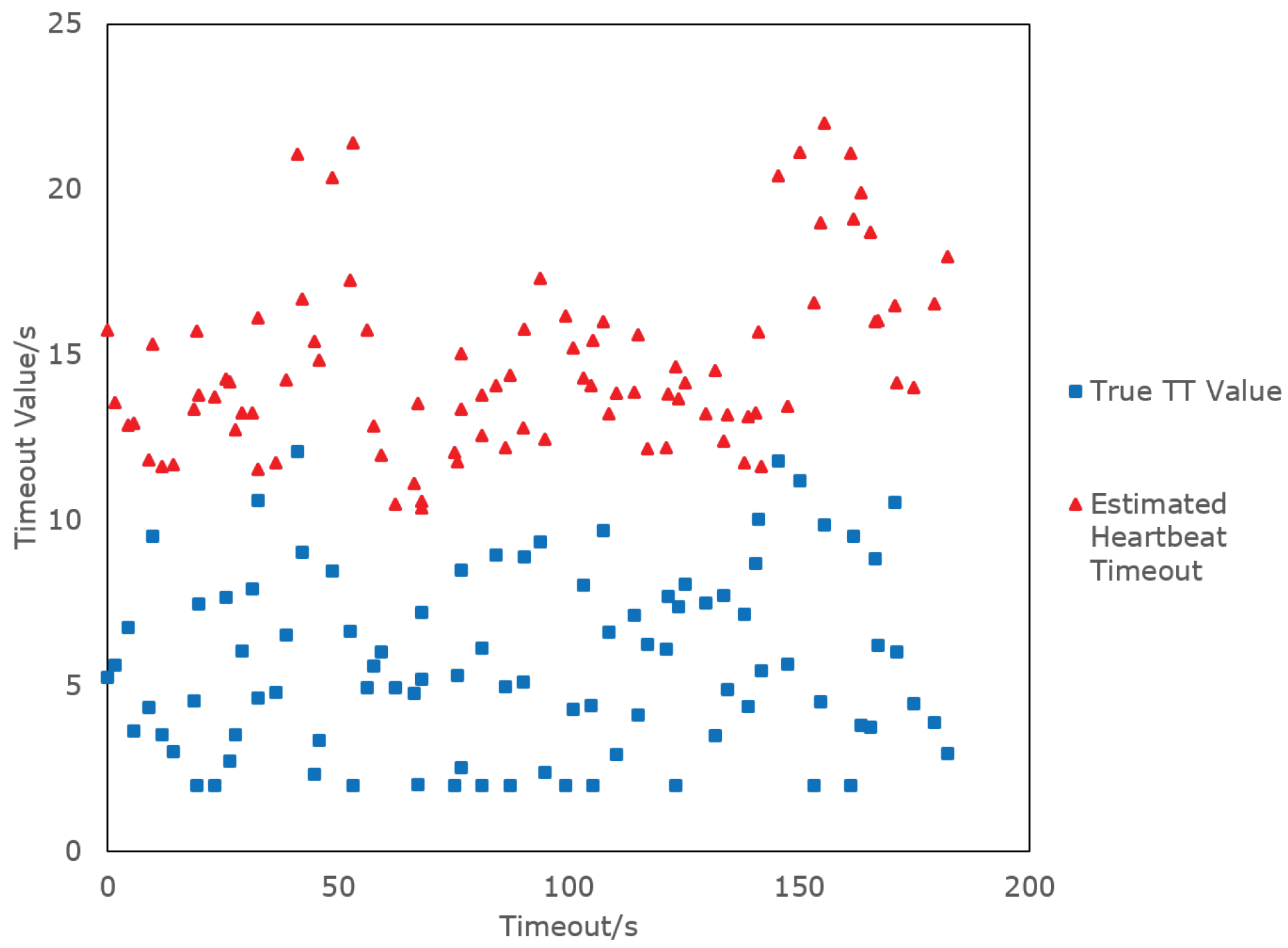
- The experimental heartbeat timeout and the true TT value was logged.
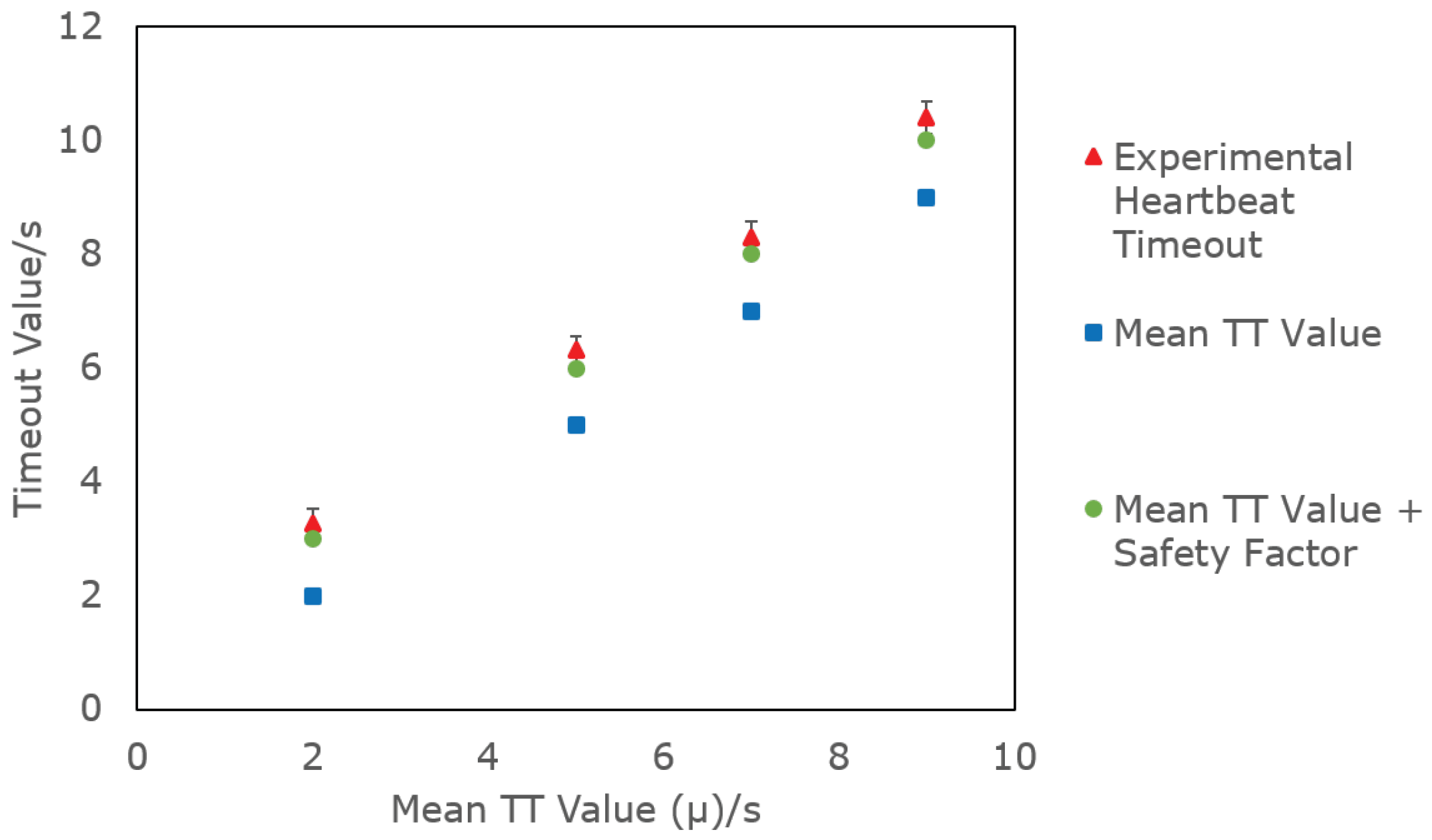
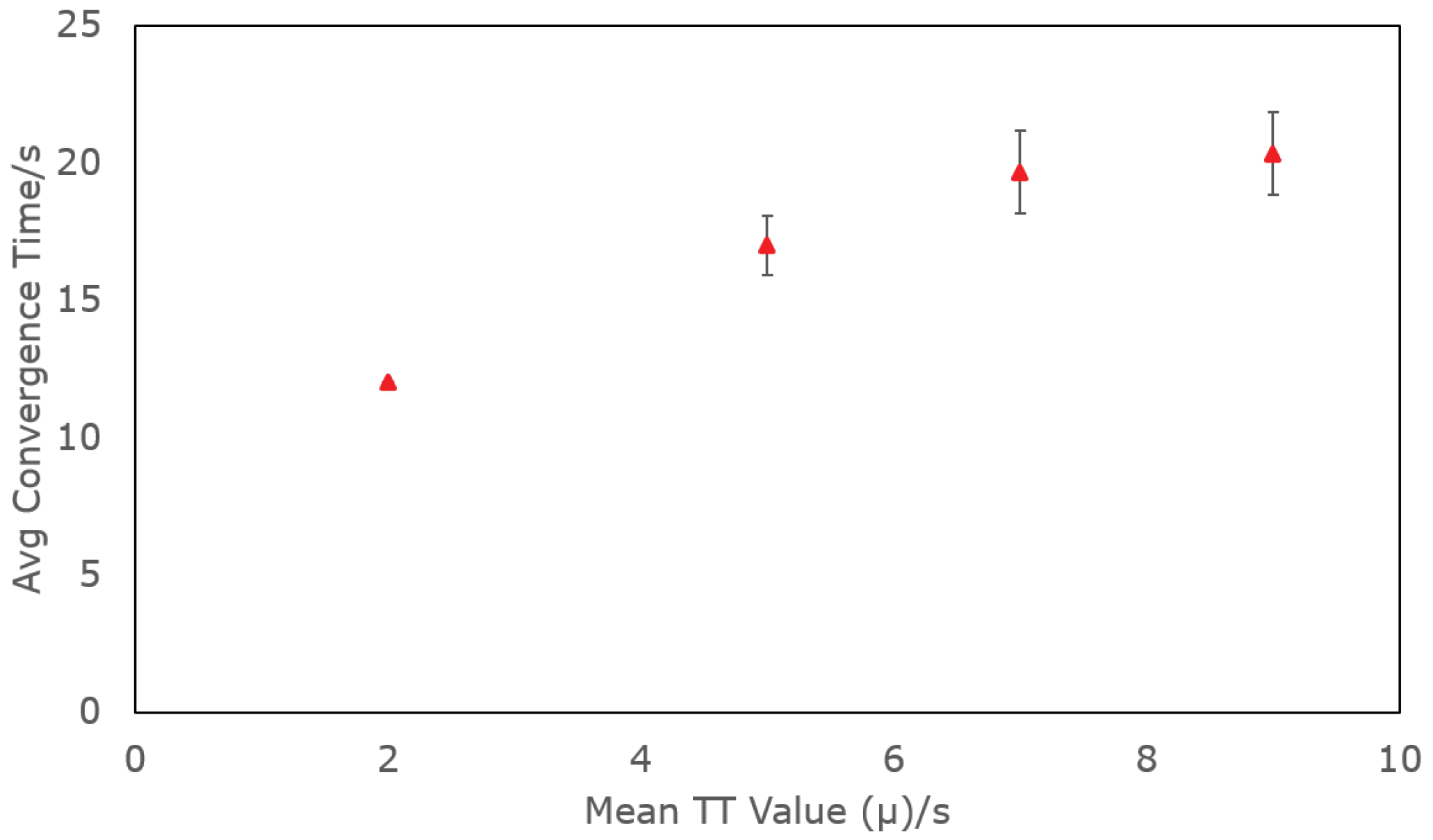
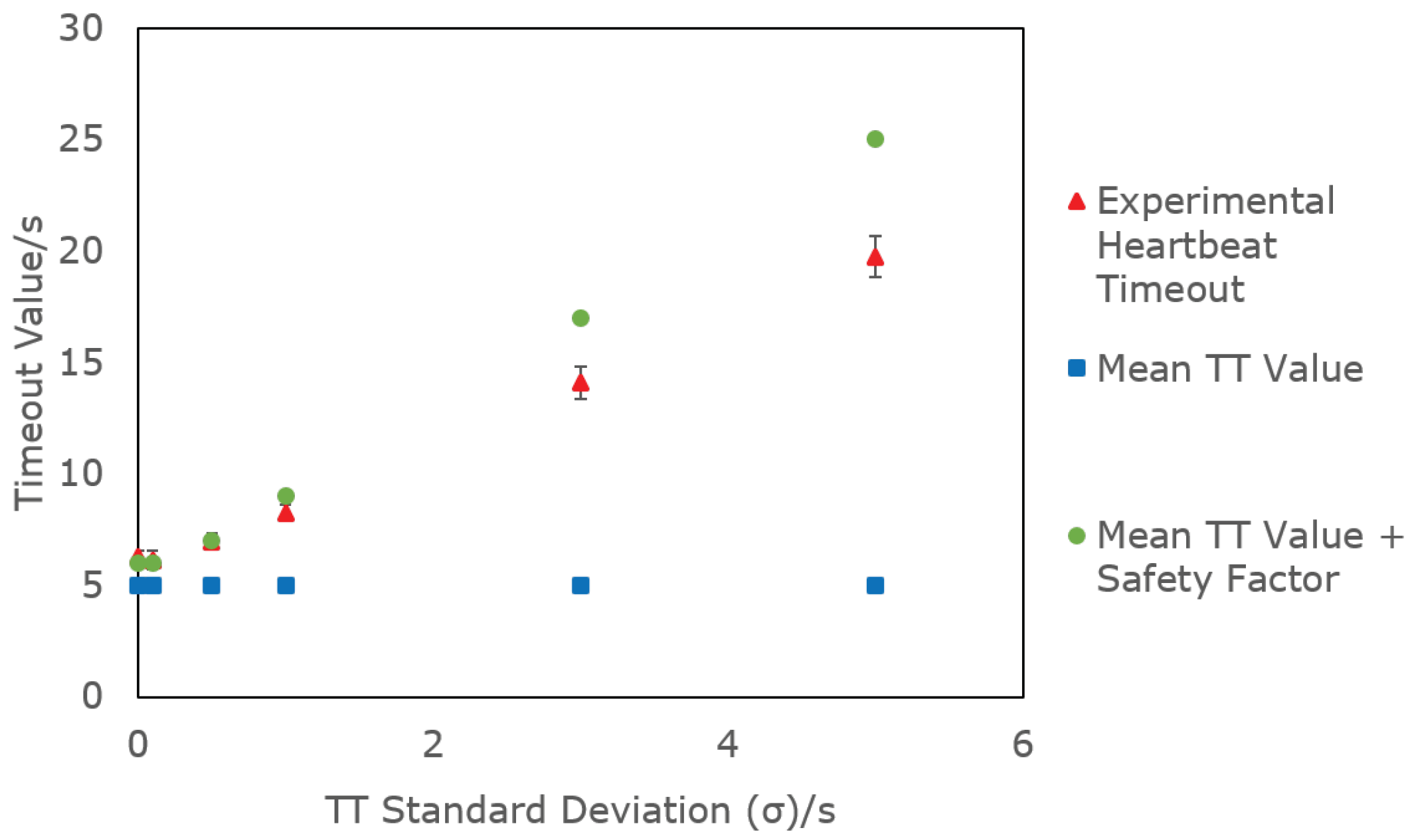
- was varied while was kept constant at 0 s for varying test runs.
- was varied while was kept constant at 5 s for varying test runs.
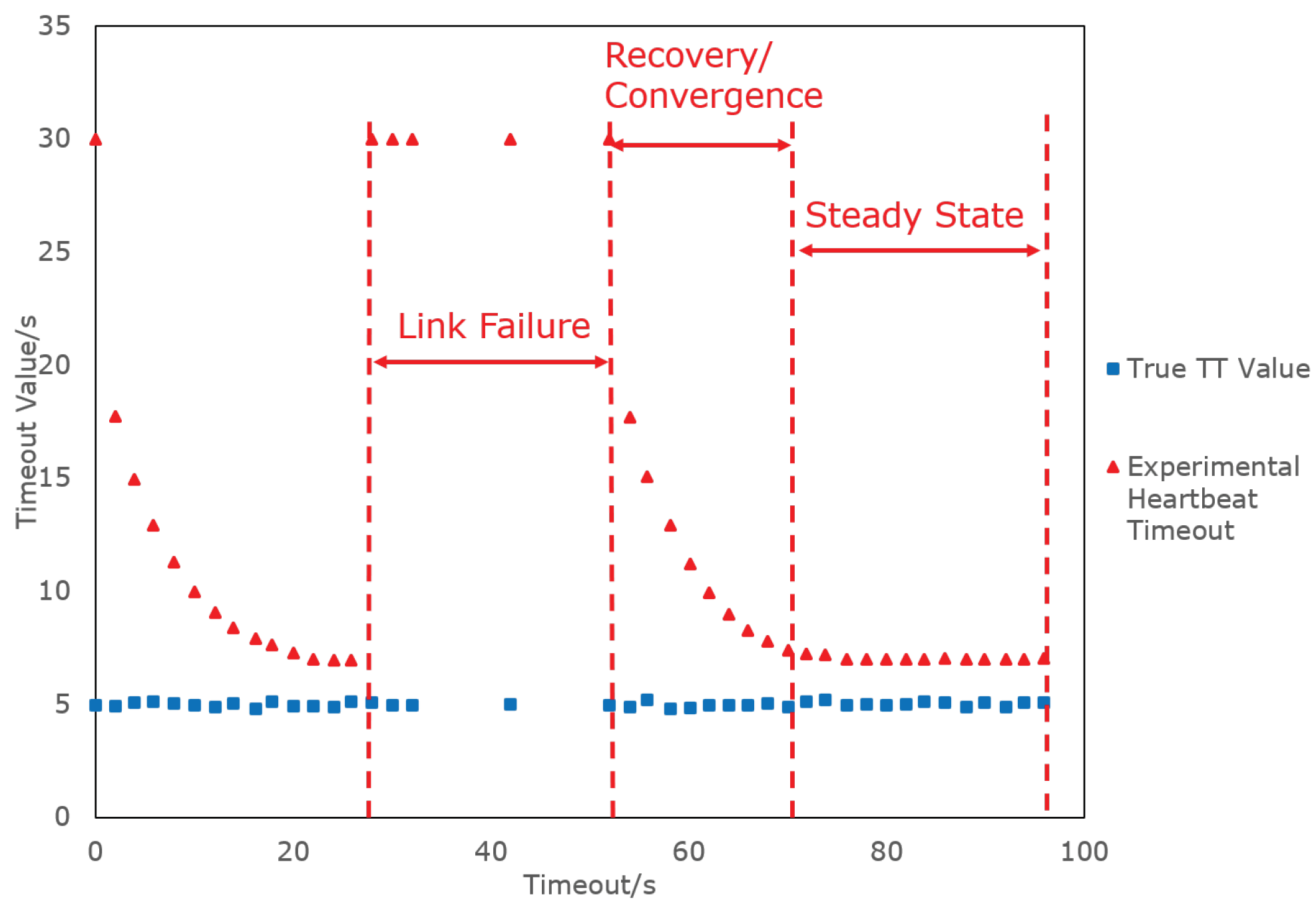
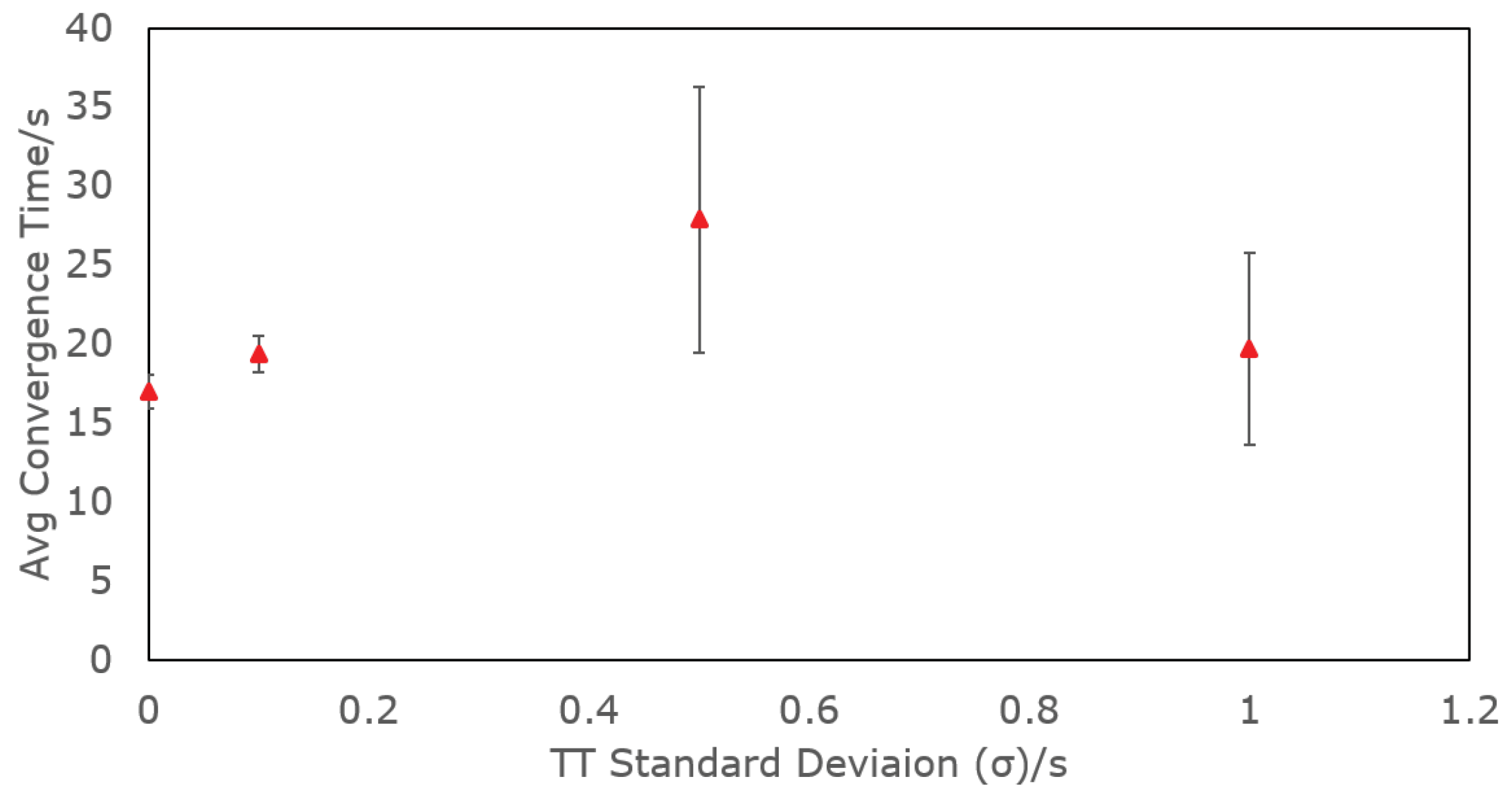
- With = 5 s and = 0.1 s, the test run was modified as follows: At the 20 s mark, the ground side was disconnected to simulate a link failure. The link was re-connected after another 20 s.
3. Results
4. Discussion
4.1. Experiments 1 and 2
4.2. Experiment 3
4.3. Suggested Improvements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BVLOS | Beyond Visual Line-of-Sight |
| LTE | Long Term Evolution |
| MAVLink | Micro-Air-Vehicle Link Communication Protocol |
| ROS | Robot Operating System |
| RTT | Round Trip Time |
| SAR | Search and Rescue |
| SBD | Short Burst Data |
| SMS | Short Message Service |
| TCP | Transmission Control Protocol |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| TT | Trip Time |
| Mean TT value under steady state conditions | |
| TT Standard Deviation under steady state conditions | |
| Heartbeat broadcast frequency during link failure |
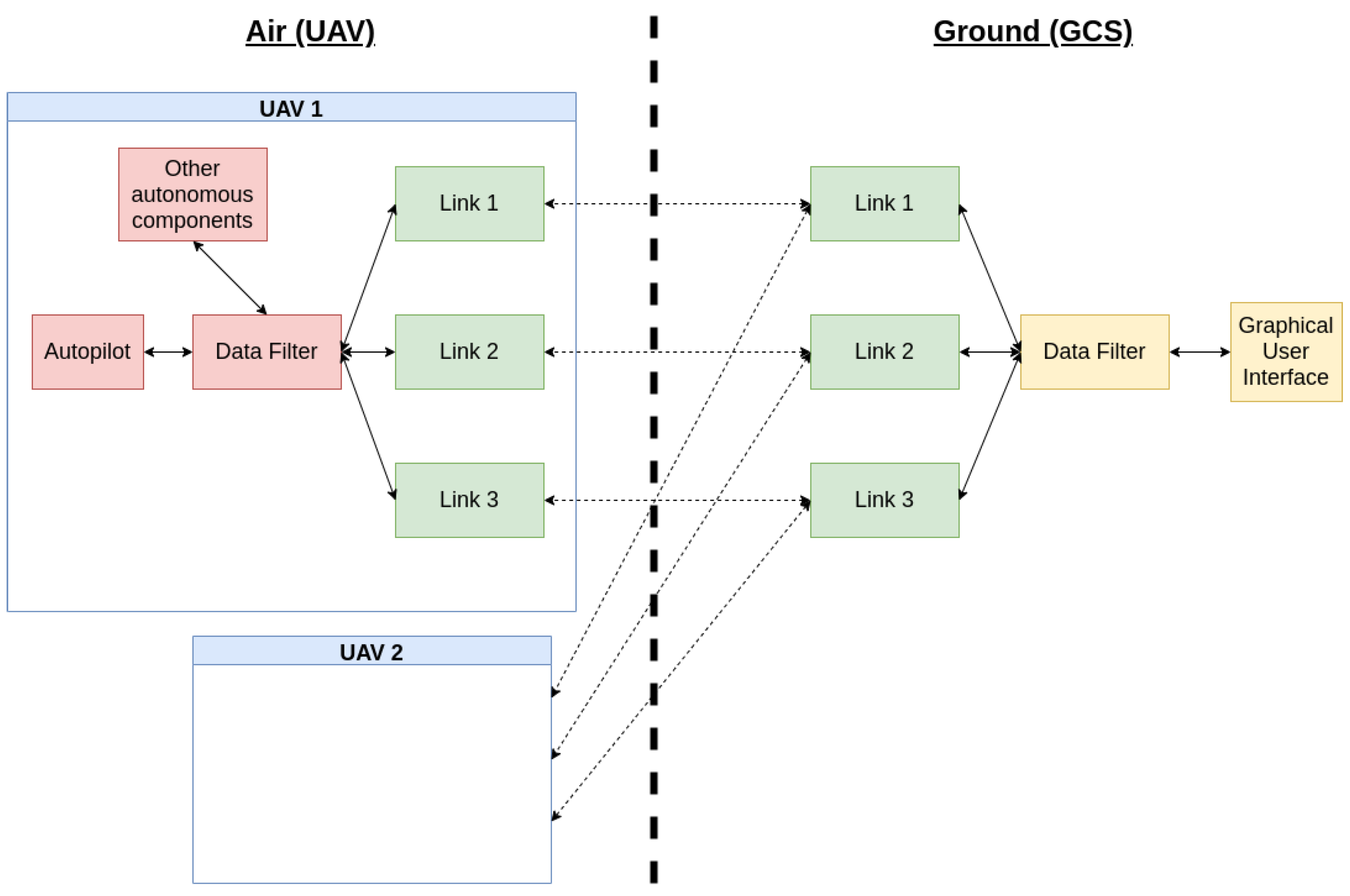
Appendix A. Design of Yonah’s UAV Communication System
Appendix A.1. Overall System Design

- Simple and user-friendly for ground operators.
- Accessible in rural areas.
- Reliable communication up to 100 km.
Appendix A.2. Cellular Data Link

Appendix A.3. SMS Link
Appendix A.4. Satellite Link

Appendix B. Guide to Running Lab Simulations
Appendix B.1. Software Details
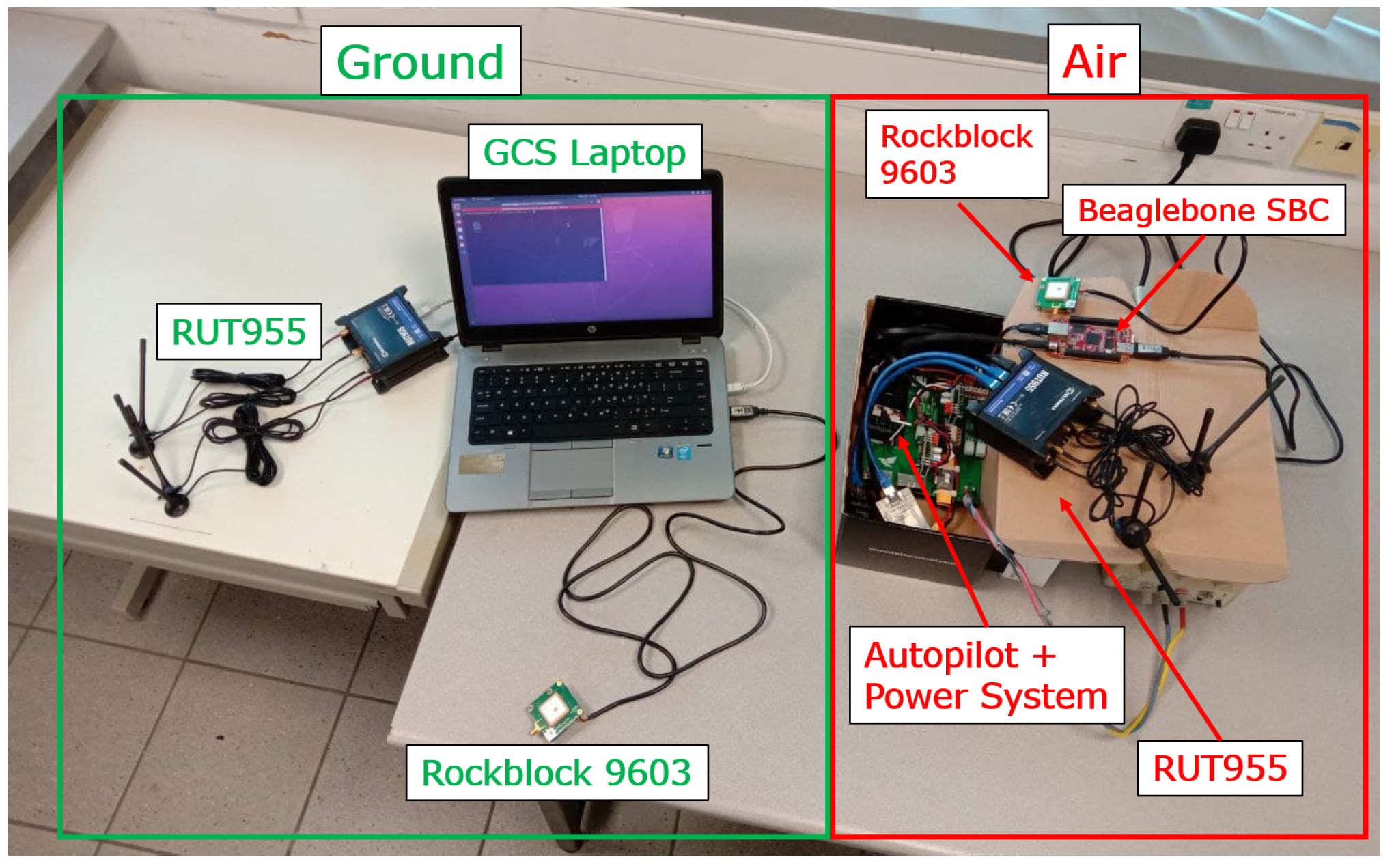
Appendix B.2. Required Materials
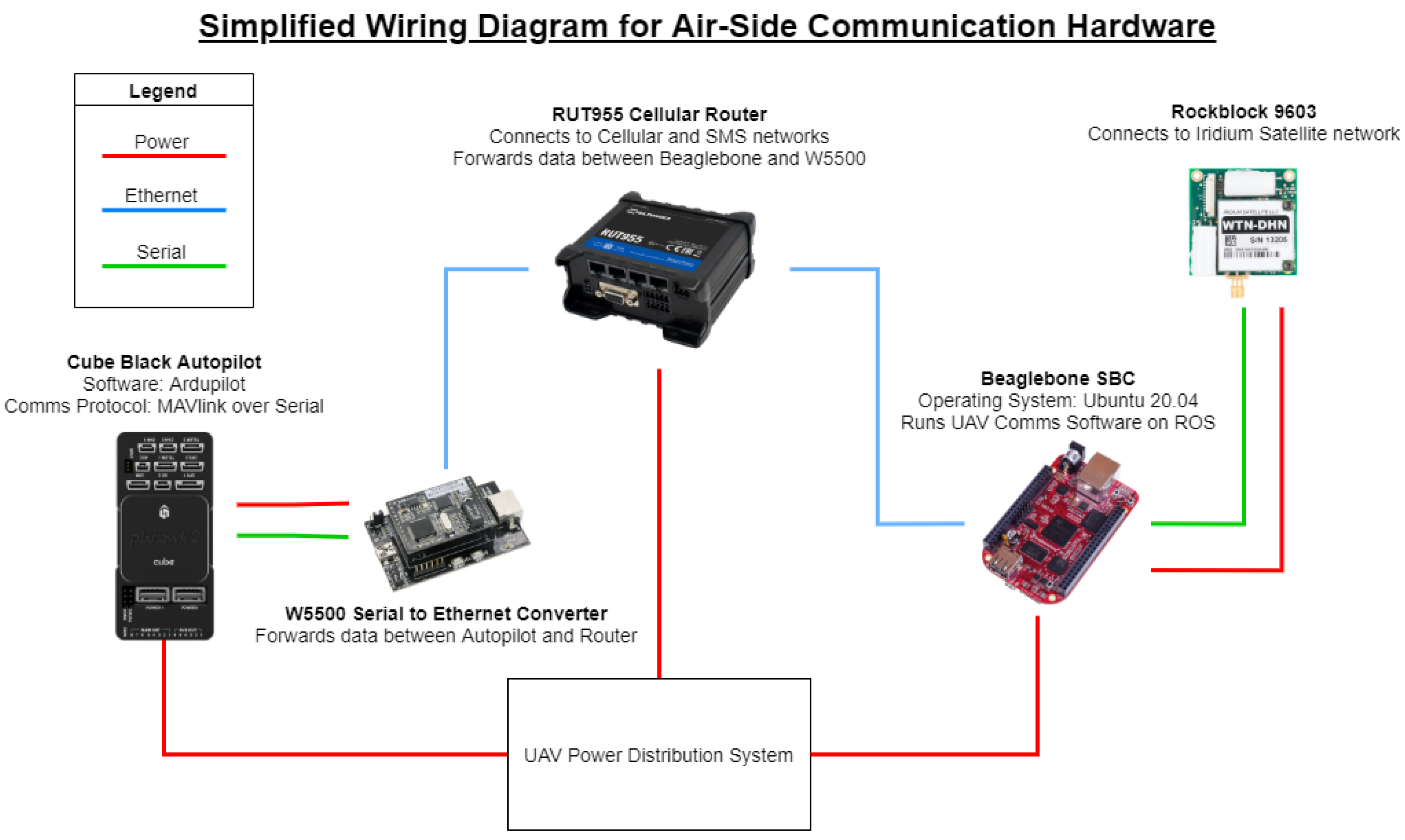
- 1 × RUT955 cellular router with SIM card inserted.
- 1 × Rockblock 9603 satellite modem.
- 1 × Beaglebone Black Industrial SBC.
- 1 × CubeBlack autopilot running Arduplane 3.9.8 firmware.
- 1 × W5500 Serial to Ethernet Converter + Carrier Board.
- Power source for all the above-mentioned hardware.
Appendix B.3. Experimental Preconfiguring
- The “SIM” variable activates or deactivates the high latency simulator. Set it to 1 to activate the simulator.
- The “mean” variable is the mean delay added to the system. This delay is added to the time interval between each heartbeat to generate the overall for the Trip Time.
- The “stdev” variable controls the TT value directly.
- Interval 1. This is the time interval between each heartbeat on the cellular link when the link is active.
- Interval 2. This is the time interval between each heartbeat on the cellular link when the link has failed.
Appendix B.4. Experimental Procedures
References
- Gilman, D.; Easton, M.; Gelsdorf, K.; Strohmeyer, H. Unmanned Aerial Vehicles in Humanitarian Response; Technical Report; United Nations Office for the Coordination of Humanitarian Affairs, Policy Development and Studies Branch: New York, NY, USA, 2014. [Google Scholar]
- Dirks, W.; Guirao, O.L.; Di Carlo, S. Evaluation of the Business Cases for Cargo Drones in Humanitarian Action; Technical Report; Medecins Sans Frontiers: Tokyo, Japan, 2017. [Google Scholar]
- Roberts, J.; Frousheger, D.; Williams, B.; Campbell, D.; Walker, R. How the UAV Challenge Outback Rescue was finally won. IEEE Robot. Autom. Mag. 2015, 23, 54–62. [Google Scholar] [CrossRef]
- Yonah. Connecting Rural Healthcare Systems. 2020. Available online: https://www.yonah.sg/ (accessed on 11 March 2021).
- Volkert, A.; Hackbarth, H.; Joonas Lieb, T.; Kern, S. Flight Tests of Ranges and Latencies of a Threefold Redundant C2 Multi-Link Solution for Small Drones in VLL Airspace. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019. [Google Scholar] [CrossRef] [Green Version]
- Austin, R. Unmanned Aircraft Systems: UAV Design, Development and Deployment; John Wiley and Sons Ltd.: Chichester, UK, 2010. [Google Scholar]
- Li, B.; Jiang, Y.; Sun, J.; Cai, L.; Wen, C.Y. Development and Testing of a Two UAV Communication Relay System. Sensors 2016, 16, 1696. [Google Scholar] [CrossRef] [PubMed]
- Gorczak, P.; Bektas, C.; Kurtz, F.; Lübcke, T.; Wietfeld, C. Robust Cellular Communications for Unmanned Aerial Vehicles in Maritime Search and Rescue. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Würzburg, Germany, 2–4 September 2019. [Google Scholar]
- Güldenring, J.; Koring, L.; Gorczak, P.; Wietfeld, C. Heterogeneous Multilink Aggregation for Reliable UAV Communication in Maritime Search and Rescue Missions. In Proceedings of the Sixth International Workshop on ICT Systems for Public Protection and Risk Reduction, Barcelona, Spain, 21–23 October 2019; pp. 215–220. [Google Scholar]
- Güldenring, J.; Gorczak, P.; Eckermann, F.; Patchou, M.; Tiemann, J.; Kurtz, F.; Wietfeld, C. Reliable Long-Range Multi-Link Communication for Unmanned Search and Rescue Aircraft Systems in Beyond Visual Line of Sight Operation. Drones 2020, 4, 16. [Google Scholar] [CrossRef]
- Kerczewski, R.J.; Meza, M.; Gupta, O. Application of the Iridium Satellite System to Aeronautical Communications; Technical Report; NASA Technical Reports Server: Houston, TX, USA, 2008. [Google Scholar]
- Downer, J. When Failure is an Option: Redundancy, Reliability and Regulation in Complex Technical Systems; LSE Research Online Documents on Economics 36537; London School of Economics and Political Science, LSE Library: London, UK, 2009. [Google Scholar]
- Geraci, G.; Garcia-Rodriguez, A.; Giodarno, L.G.; Lopez-Perez, D.; Bjornson, E. Understanding UAV Cellular Communications: From Existing Networks to Massive MIMO. Inst. Electr. Electron. Eng. IEEE Access 2018, 6, 67853–67865. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Seven, R. Rockblock 9603. 2020. Available online: https://www.rock7.com/products/rockblock-9603-compact-plug-play-satellite-transmitter (accessed on 11 March 2021).
- Zhou, Y.; Jun, L.; Lamont, L.; Rabbath, C.A. A Markov-Based Packet Dropout Model for UAV Wireless Communications. J. Commun. 2012, 7, 418–425. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, H.; Wu, W.; Wei, J. Deployment Algorithms for UAV Airborne Networks Toward On-Demand Coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2015–2031. [Google Scholar] [CrossRef]
- Kleinberg, J.; Sandler, M.; Slivkins, A. Network Failure Detection and Graph Connectivity. In Proceedings of the Fifteenth Annual ACM-SIAM Symposium on Discrete Algorithms, Baltimore, MD, USA, 12–14 January 2013; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2003; pp. 76–85. [Google Scholar]
- MAVlink. MAVlink Source Code (Github). 2021. Available online: https://github.com/mavlink/mavlink (accessed on 11 March 2021).
- Jacobson, V.; Karels, M.J. Congestion Avoidance and Control. In Proceedings of the SIGCOMM ’88, Stanford, CA, USA, 16–18 August 1988. [Google Scholar]
- Paxson, V.; Allman, M.; Chu, J.; Sargent, M. RFC6298: Computing TCP’s Retransmission Timer. 2011. Available online: https://tools.ietf.org/html/rfc6298 (accessed on 11 March 2021).
- Kesselman, A.; Mansour, Y. Optimizing TCP Retransmission Timeout. In Proceedings of the 4th International Conference on Networking, Reunion Island, France, 17–21 April 2005; Volume 3421, pp. 133–140. [Google Scholar] [CrossRef] [Green Version]
Short Biography of Authors
 | Yan Han Lau is a final-year Mechanical Engineering undergraduate at the National University of Singapore (NUS), specialising in Aeronautical Engineering and Unmanned Aviation Systems. During his undergraduate studies, he was attached to Yonah Pte Ltd as a Guidance, Navigation and Control Engineer. His work included assisting in the integration and flight testing of Yonah’s UAV avionics, tuning of the multirotor PID controller, and design of the long-range, dissimilar redundant UAV Communication System. His contributions to the research and development of Yonah’s avionics capabilities led him to be awarded the NUS Outstanding Undergraduate Research Prize in 2019. |
 | Marcelo H Ang, Jr. received the B.Sc. degrees (Cum Laude) in Mechanical Engineering and Industrial Management Engineering from the De La Salle University, Manila, Philippines, in 1981; the M.Sc. degree in Mechanical Engineering from the University of Hawaii at Manoa, Honolulu, Hawaii, in 1985; and the M.Sc. and Ph.D. degrees in Electrical Engineering from the University of Rochester, Rochester, New York, in 1986 and 1988, respectively. His work experience includes heading the Technical Training Division of Intel’s Assembly and Test Facility in the Philippines, research positions at the East West Center in Hawaii and at the Massachusetts Institute of Technology, and a faculty position as an Assistant Professor of Electrical Engineering at the University of Rochester, New York. In 1989, Dr. Ang joined the Department of Mechanical Engineering of the National University of Singapore, where he is currently a Professor. He is also the Acting Director of the Advanced Robotics Centre. His research interests span the areas of robotics, mechatronics, and applications of intelligent systems methodologies. He teaches both at the graduate and undergraduate levels in the following areas: robotics; creativity and innovation, and Engineering Mathematics. He is also active in consulting work in robotics and intelligent systems. In addition to academic and research activities, he is actively involved in the Singapore Robotic Games as its founding chairman and the World Robot Olympiad as a member of the Advisory Council. |











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Protocol | Purpose |
|---|---|---|
| 1 | Cellular Data | Primary link in areas with Long Term Evolution (LTE)/3G networks. |
| 2 | SMS | First backup link in areas without LTE/3G but with 2G coverage |
| 3 | Satellite | Final backup Link when there is zero cellular coverage. Communicates through Iridium’s global satellite network |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lau, Y.H.; Ang, M.H., Jr. A Novel Link Failure Detection and Switching Algorithm for Dissimilar Redundant UAV Communication. Drones 2021, 5, 48. https://doi.org/10.3390/drones5020048
Lau YH, Ang MH Jr. A Novel Link Failure Detection and Switching Algorithm for Dissimilar Redundant UAV Communication. Drones. 2021; 5(2):48. https://doi.org/10.3390/drones5020048
Chicago/Turabian StyleLau, Yan Han, and Marcelo H. Ang, Jr. 2021. "A Novel Link Failure Detection and Switching Algorithm for Dissimilar Redundant UAV Communication" Drones 5, no. 2: 48. https://doi.org/10.3390/drones5020048
APA StyleLau, Y. H., & Ang, M. H., Jr. (2021). A Novel Link Failure Detection and Switching Algorithm for Dissimilar Redundant UAV Communication. Drones, 5(2), 48. https://doi.org/10.3390/drones5020048