
A Network Slicing Framework for UAV-Aided Vehicular Networks


 ,
,
Abstract
:1. Introduction
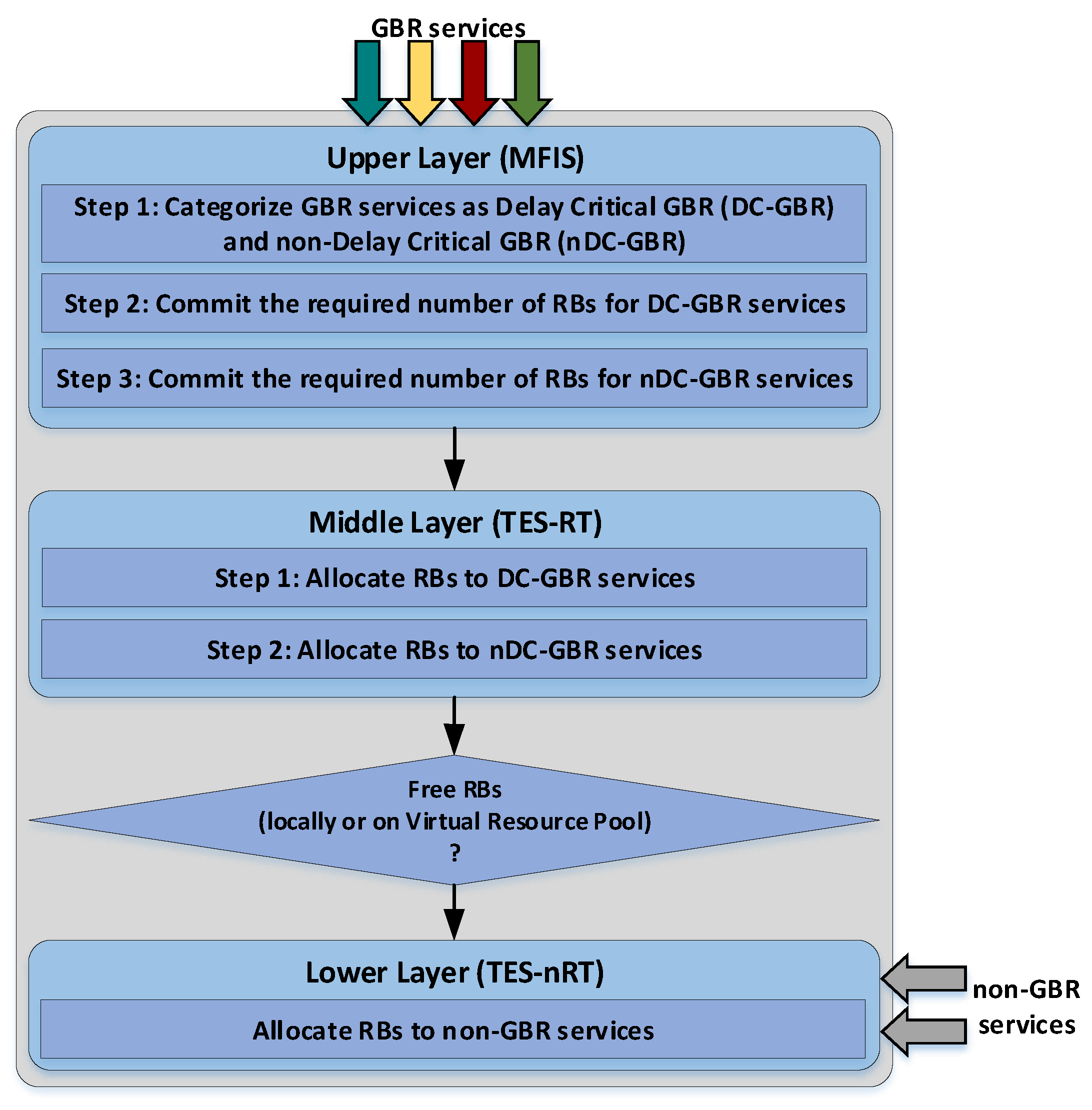
- A three-layer architecture is implemented for the optimal allocation of communication resources to user services.
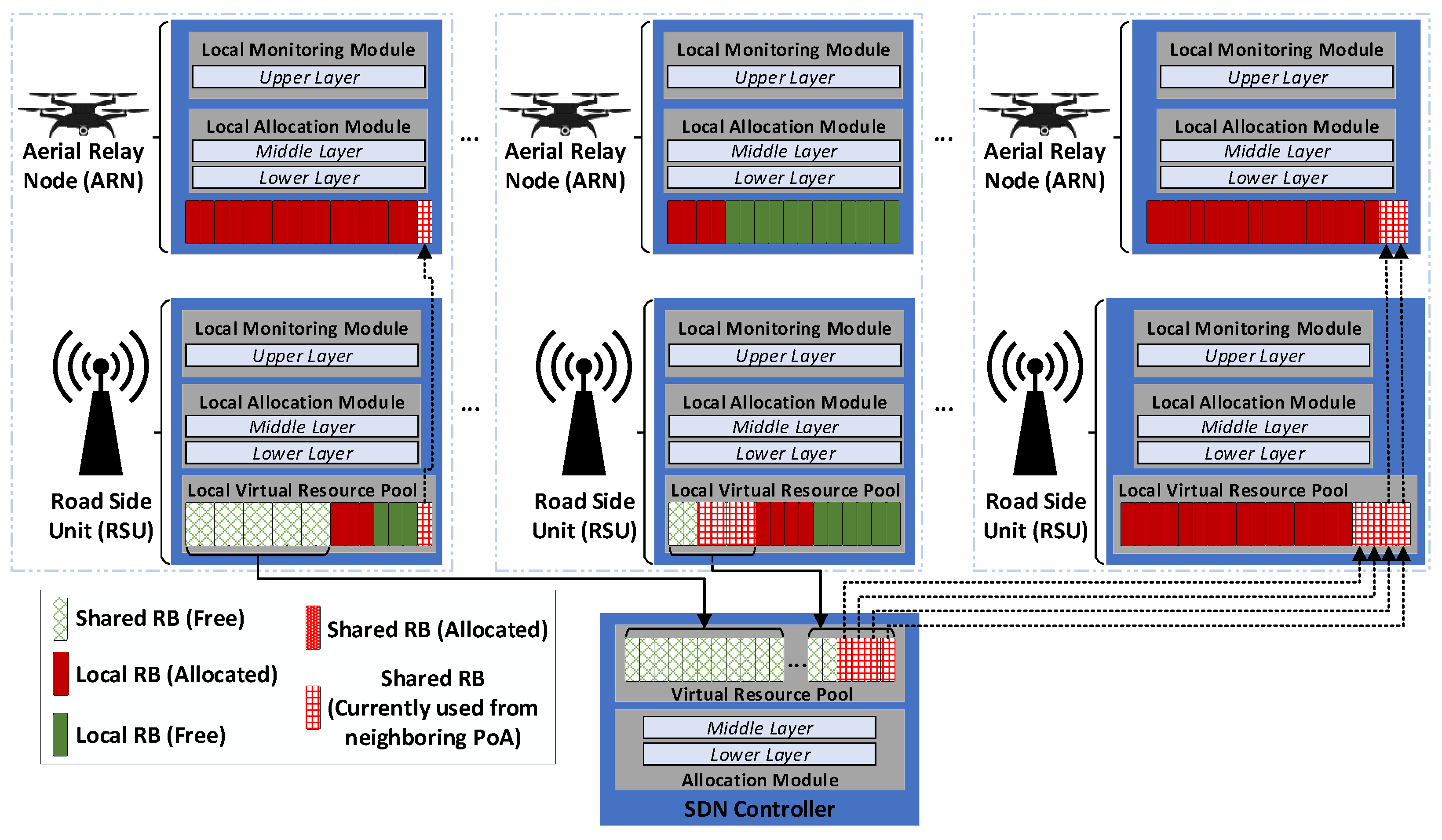
- Both RSUs and ARNs are deployed to undertake the service of vehicular users.
- The satisfaction grade of user services, considered during the network slicing process, is estimated using the Mamdani fuzzy inference system (MFIS).
- Both the QoS and the SINR are considered for the estimation of the satisfaction grade of user services.
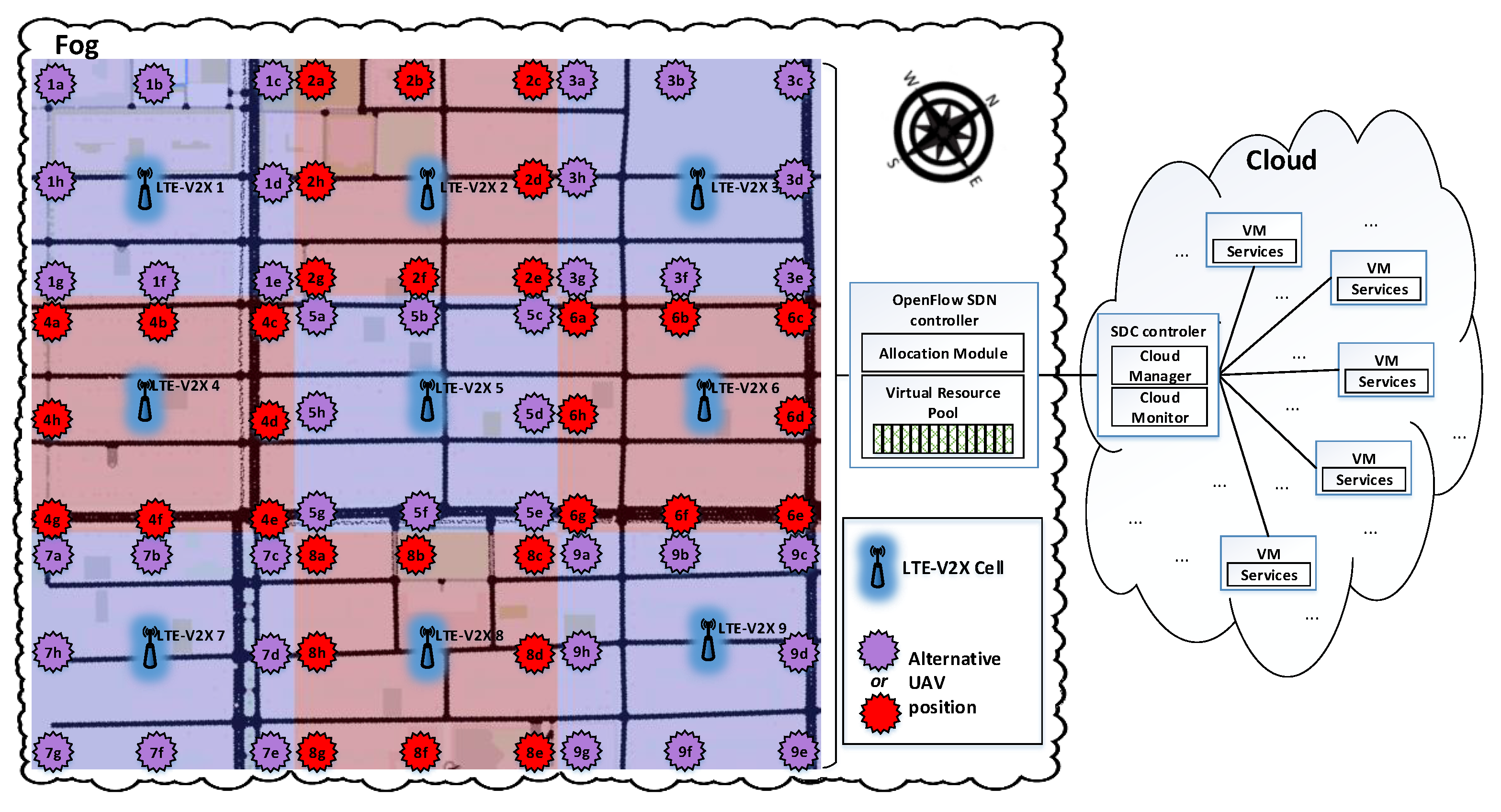
- A fuzzy MADM algorithm is used for the optimization of the position of each ARN.
- ARNs can commit additional communication resources from the LVRP of the corresponding RSUs to meet the requirements of the services of their users.
- An SDN controller maintains a VRP allowing the RSUs to commit additional communication resources to satisfy the strict requirements of users’ services.
- Both the MFIS that estimates the satisfaction grade of user services and the fuzzy MADM algorithm that performs the optimization of the ARNs’ positions are implemented using IVIFNs.
2. State of the Art
2.1. Network Slicing in Vehicular Networks
2.2. The Emergence of Aerial Networks
2.3. Contribution
3. The Proposed Network Slicing Scheme
3.1. The Layered Design of the Proposed Scheme
3.1.1. The Upper Layer of the Network Slicing Scheme
The Mamdani Satisfaction Chart
3.1.2. The Middle Layer of the Network Slicing Scheme
3.1.3. The Lower Layer of the Network Slicing Scheme
3.2. The Proposed Network Architecture
4. Optimization of the Positions of ARNs
The Icosagonal Fuzzy TOPSIS (IFT)
- Step 1. Construction of the decision matrix: each element of the decision matrix D is an interval-valued icosagonal fuzzy number which expresses the evaluation of the alternative position i considering the criterion j. Thus:where: .
- Step 2. Normalization of the decision matrix: consider that is the set of benefit evaluation criteria and is the set of cost evaluation criteria. Then, the elements of the normalized decision matrix are computed aswhere for each , or:where for each .
- Step 3. Construction of the weighted normalized decision matrix: for the construction of the weighted normalized decision matrix, each element of the normalized decision matrix is multiplied with the respective criterion weight according to the formula:
- Step 4. Determination of the positive and negative ideal solution: in this step, the positive ideal solution is defined aswhere in case and in case . Accordingly, the negative ideal solutions is defined aswhere in case and in case .
- Step 5. Estimation of the distance of each alternative solution from the positive and the negative ideal solutions: the distances and of each alternative solution from the positive ideal solution are estimated as follows:Similarly, the distances and of each alternative solution from the negative ideal solution are estimated as follows:Thus, the distance of the alternative solutions from the positive and negative ideal solutions are expressed by intervals such as and [52], instead of single values. In this way, less information is lost.
- Step 6. Calculation of the relative closeness: the relative closeness of the distances from the ideal solutions are computed as follows:and:The compound relative closeness is obtained from the average of the above values:
- Step 7. Alternatives ranking: the alternative solutions are ranked according to their values. The position with the higher value is selected since it is considered the best alternative solution.
5. Simulation Setup
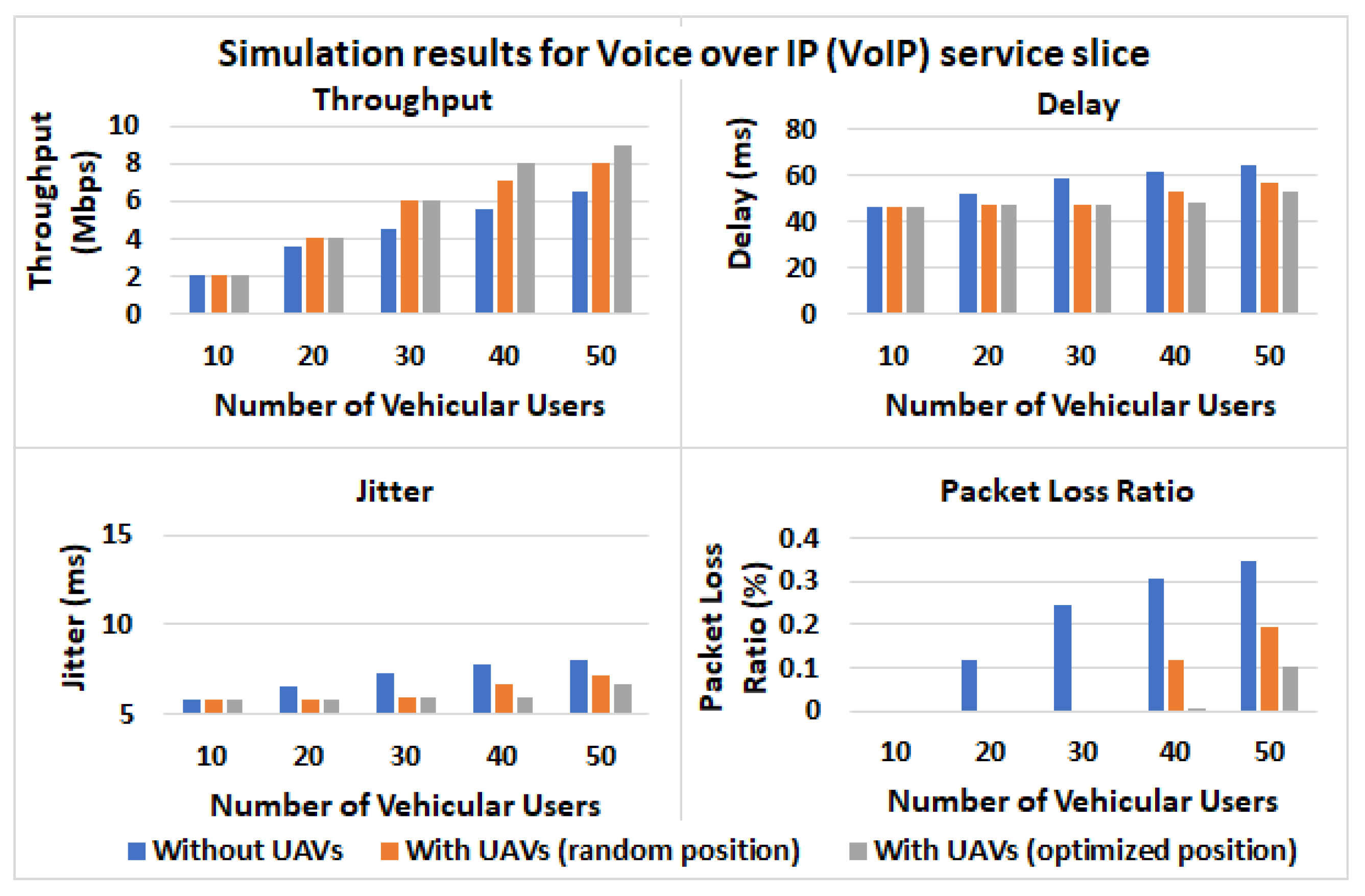
6. Experimental Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kazemifard, N.; Shah-Mansouri, V. Minimum delay function placement and resource allocation for Open RAN (O-RAN) 5G networks. Comput. Netw. 2021, 188, 107809. [Google Scholar] [CrossRef]
- TR 21.915 (V15.0.0): Digital Cellular Telecommunications System (Phase 2+) (GSM); LTE; 5G; (Rel.15); Technical Specification, 3GPP; Universal Mobile Telecommunications System (UMTS): Sophia Antipolis, France, 2019.
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Raj, A.S.A.; Palanichamy, Y. An aerial intelligent relay-road side unit (AIR-RSU) framework for modern intelligent transportation system. Peer-to-Peer Netw. Appl. 2020, 13, 965–986. [Google Scholar] [CrossRef]
- Lemeshko, O.; Yeremenko, O.; Kovalenko, T.; Al-Dulaimi, A.M.; Al-Dulaimi, M.K. Comparative Analysis of the Resource Blocks Allocation Balancing Model in the LTE Downlink Using RAT 1 with Existing Solutions. In Proceedings of the 2018 International Scientific-Practical Conference Problems of Infocommunications, Science and Technology (PIC S&T), Kharkiv, Ukraine, 9–12 October 2018; pp. 701–704. [Google Scholar]
- Raju, V.; Jayagopal, R. An Arithmetic Operations of Icosagonal fuzzy number using Alpha cut. Int. J. Pure Appl. Math. 2018, 120, 137–145. [Google Scholar]
- Next Generation Mobile Network Alliance (NGMN). 2021. Available online: https://www.ngmn.org/ (accessed on 20 June 2021).
- Marinova, S.; Lin, T.; Bannazadeh, H.; Leon-Garcia, A. End-to-end network slicing for future wireless in multi-region cloud platforms. Comput. Netw. 2020, 177, 107298. [Google Scholar] [CrossRef]
- Nojima, D.; Katsumata, Y.; Shimojo, T.; Morihiro, Y.; Asai, T.; Yamada, A.; Iwashina, S. Resource isolation in RAN part while utilizing ordinary scheduling algorithm for network slicing. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Joung, J. Random space–time line code with proportional fairness scheduling. IEEE Access 2020, 8, 35253–35262. [Google Scholar] [CrossRef]
- Ge, X. Ultra-reliable low-latency communications in autonomous vehicular networks. IEEE Trans. Veh. Technol. 2019, 68, 5005–5016. [Google Scholar] [CrossRef] [Green Version]
- Piro, G.; Grieco, L.A.; Boggia, G.; Fortuna, R.; Camarda, P. Two-level downlink scheduling for real-time multimedia services in LTE networks. IEEE Trans. Multimed. 2011, 13, 1052–1065. [Google Scholar] [CrossRef]
- Ouaissa, M.; Rhattoy, A.; Lahmer, M. Comparative performance study of QoS downlink scheduling algorithms in LTE system for M2M communications. In Proceedings of the International Conference Europe Middle East & North Africa Information Systems and Technologies to Support Learning, Fez, Morocco, 25–27 October 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 216–224. [Google Scholar]
- Skondras, E.; Michalas, A.; Sgora, A.; Vergados, D.D. A downlink scheduler supporting real time services in LTE cellular networks. In Proceedings of the 2015 6th International Conference on Information, Intelligence, Systems and Applications (IISA), Corfu, Greece, 6–8 July 2015; pp. 1–6. [Google Scholar]
- Skondras, E.; Michalas, A.; Sgora, A.; Vergados, D.D. QoS-aware scheduling in LTE-A networks with SDN control. In Proceedings of the 2016 7th International Conference on Information, Intelligence, Systems & Applications (IISA), Chalkidiki, Greece, 13–15 July 2016; pp. 1–6. [Google Scholar]
- Mihovska, A.; Prasad, R. Overview of 5G New Radio and Carrier Aggregation: 5G and Beyond Networks. In Proceedings of the 2020 23rd International Symposium on Wireless Personal Multimedia Communications (WPMC), Okayama, Japan, 18–26 October 2020; pp. 1–6. [Google Scholar]
- Haci, H.; Abdelbari, A. Throughput enhanced scheduling (TES) scheme for ultra-dense networks. Int. J. Commun. Syst. 2020, 33, e4229. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, H.; Li, J.; Xu, W.; Zhang, N.; Shen, X. Drone assisted vehicular networks: Architecture, challenges and opportunities. IEEE Netw. 2018, 32, 130–137. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Potirakis, S.M.; Kanatas, A.G. AI-Inspired Non-Terrestrial Networks for IIoT: Review on Enabling Technologies and Applications. IoT 2020, 1, 21–48. [Google Scholar] [CrossRef]
- Khabbaz, M.; Antoun, J.; Assi, C. Modeling and performance analysis of UAV-assisted vehicular networks. IEEE Trans. Veh. Technol. 2019, 68, 8384–8396. [Google Scholar] [CrossRef]
- Fawaz, W. Effect of non-cooperative vehicles on path connectivity in vehicular networks: A theoretical analysis and UAV-based remedy. Veh. Commun. 2018, 11, 12–19. [Google Scholar] [CrossRef]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-aided networks: Aerial-ground cooperative vehicular networking architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Hong, K.; Lillethun, D.; Ramachandran, U.; Ottenwälder, B.; Koldehofe, B. Mobile fog: A programming model for large-scale applications on the internet of things. In Proceedings of the Second ACM SIGCOMM Workshop on Mobile Cloud Computing, Hong Kong, China, 16 August 2013; pp. 15–20. [Google Scholar]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A survey on machine-learning techniques for UAV-based communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Secinti, G.; Darian, P.B.; Canberk, B.; Chowdhury, K.R. SDNs in the sky: Robust end-to-end connectivity for aerial vehicular networks. IEEE Commun. Mag. 2018, 56, 16–21. [Google Scholar] [CrossRef]
- Nomikos, N.; Michailidis, E.T.; Trakadas, P.; Vouyioukas, D.; Karl, H.; Martrat, J.; Zahariadis, T.; Papadopoulos, K.; Voliotis, S. A UAV-based moving 5G RAN for massive connectivity of mobile users and IoT devices. Veh. Commun. 2020, 25, 100250. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Miridakis, N.I.; Michalas, A.; Skondras, E.; Vergados, D.J. Energy Optimization in Dual-RIS UAV-Aided MEC-Enabled Internet of Vehicles. Sensors 2021, 21, 4392. [Google Scholar] [CrossRef]
- Cheng, N.; Xu, W.; Shi, W.; Zhou, Y.; Lu, N.; Zhou, H.; Shen, X. Air-ground integrated mobile edge networks: Architecture, challenges, and opportunities. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef] [Green Version]
- Faraci, G.; Grasso, C.; Schembra, G. Design of a 5G network slice extension with MEC UAVs managed with reinforcement learning. IEEE J. Sel. Areas Commun. 2020, 38, 2356–2371. [Google Scholar] [CrossRef]
- Yuan, Z.; Muntean, G.M. AirSlice: A Network Slicing Framework for UAV Communications. IEEE Commun. Mag. 2020, 58, 62–68. [Google Scholar] [CrossRef]
- Xilouris, G.K.; Batistatos, M.C.; Athanasiadou, G.E.; Tsoulos, G.; Pervaiz, H.B.; Zarakovitis, C.C. UAV-assisted 5G network architecture with slicing and virtualization. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Garcia, A.E.; Hofmann, S.; Sous, C.; Garcia, L.; Baltaci, A.; Bach, C.; Wellens, R.; Gera, D.; Schupke, D.; Gonzalez, H.E. Performance evaluation of network slicing for aerial vehicle communications. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 22–24 May 2019; pp. 1–6. [Google Scholar]
- Zhang, S.; Quan, W.; Li, J.; Shi, W.; Yang, P.; Shen, X. Air-ground integrated vehicular network slicing with content pushing and caching. IEEE J. Sel. Areas Commun. 2018, 36, 2114–2127. [Google Scholar] [CrossRef] [Green Version]
- Lyu, F.; Yang, P.; Wu, H.; Zhou, C.; Ren, J.; Zhang, Y.; Shen, X. Service-Oriented Dynamic Resource Slicing and Optimization for Space-Air-Ground Integrated Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Grasso, C.; Schembra, G. A fleet of MEC UAVs to extend a 5G network slice for video monitoring with low-latency constraints. J. Sens. Actuator Netw. 2019, 8, 3. [Google Scholar] [CrossRef] [Green Version]
- Skondras, E.; Michalas, A.; Vergados, D.J.; Michailidis, E.T.; Miridakis, N.I.; Vergados, D.D. Network Slicing on 5G Vehicular Cloud Computing Systems. Electronics 2021, 10, 1474. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy logic. Computer 1988, 21, 83–93. [Google Scholar] [CrossRef]
- Singh, H.; Gupta, M.M.; Meitzler, T.; Hou, Z.G.; Garg, K.K.; Solo, A.M.; Zadeh, L.A. Real-life applications of fuzzy logic. Adv. Fuzzy Syst. 2013. [Google Scholar] [CrossRef]
- View on 5G Architecture (Version 3); 5G PPP Architecture Working Group: Heidelberg, Germany, 2019.
- Skondras, E.; Michalas, A.; Vergados, D.D. Mobility management on 5g vehicular cloud computing systems. Veh. Commun. 2019, 16, 15–44. [Google Scholar] [CrossRef]
- Desogus, C.; Anedda, M.; Murroni, M. Real-time load optimization for multimedia delivery content over heterogeneuos wireless network using a MEW approach. In Proceedings of the 2017 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Cagliari, Italy, 7–9 June 2017; pp. 1–4. [Google Scholar]
- Skondras, E.; Michalas, A.; Vergados, D.J.; Michailidis, E.T.; Miridakis, N.I. A Network Slicing Algorithm for 5G Vehicular Networks. In Proceedings of the 2021 12th International Conference on Information, Intelligence, Systems and Applications (IISA), Crete, Greece, 12–14 July 2021; pp. 1–6. [Google Scholar]
- Skondras, E.; Sgora, A.; Michalas, A.; Vergados, D.D. An analytic network process and trapezoidal interval-valued fuzzy technique for order preference by similarity to ideal solution network access selection method. Int. J. Commun. Syst. 2016, 29, 307–329. [Google Scholar] [CrossRef]
- Charilas, D.E.; Markaki, O.I.; Psarras, J.; Constantinou, P. Application of fuzzy AHP and ELECTRE to network selection. In Mobile Lightweight Wireless Systems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 63–73. [Google Scholar]
- Goyal, R.K.; Kaushal, S.; Sangaiah, A.K. The utility based non-linear fuzzy AHP optimization model for network selection in heterogeneous wireless networks. Appl. Soft Comput. 2017, 67, 800–811. [Google Scholar] [CrossRef]
- Skondras, E.; Michalas, A.; Tsolis, N.; Vergados, D.D. A network selection scheme with adaptive criteria weights for 5g vehicular systems. In Proceedings of the 2018 9th International Conference on Information, Intelligence, Systems and Applications (IISA), Zakynthos, Greece, 23–25 July 2018; pp. 1–7. [Google Scholar]
- Skondras, E.; Michalas, A.; Tsolis, N.; Vergados, D.D. A VHO scheme for supporting healthcare services in 5G vehicular cloud computing systems. In Proceedings of the 2018 Wireless Telecommunications Symposium (WTS), Phoenix, AZ, USA, 17–20 April 2018; pp. 1–6. [Google Scholar]
- Skondras, E.; Siountri, K.; Michalas, A.; Vergados, D.D. A route selection scheme for supporting virtual tours in sites with cultural interest using drones. In Proceedings of the 2018 9th International Conference on Information, Intelligence, Systems and Applications (IISA), Zakynthos, Greece, 23–25 July 2018; pp. 1–6. [Google Scholar]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Ncibi, K.; Hadji, R.; Hamdi, M.; Mokadem, N.; Abbes, M.; Khelifi, F.; Zighmi, K.; Hamed, Y. Application of the analytic hierarchy process to weight the criteria used to determine the Water Quality Index of groundwater in the northeastern basin of the Sidi Bouzid region, Central Tunisia. Euro-Mediterr. J. Environ. Integr. 2020, 5, 1–15. [Google Scholar] [CrossRef]
- Elshaboury, N.; Attia, T.; Marzouk, M. Comparison of several aggregation techniques for deriving analytic network process weights. Water Resour. Manag. 2020, 34, 4901–4919. [Google Scholar] [CrossRef]
- Ashtiani, B.; Haghighirad, F.; Makui, A. Extension of fuzzy TOPSIS method based on interval-valued fuzzy sets. Appl. Soft Comput. 2009, 9, 457–461. [Google Scholar] [CrossRef]
- Open Street Map (OSM). Available online: https://www.openstreetmap.org (accessed on 20 June 2021).
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–simulation of urban mobility: An overview. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–29 October 2011. [Google Scholar]
- Network Simulator 3 (NS3). Available online: https://www.nsnam.org/ (accessed on 20 June 2021).
- NS3 LTE-V2X Extension Module. Available online: https://github.com/eisbaer/v2x-lte (accessed on 20 June 2021).
- TR 36.814 (V9.0.0): Further advancements for E-UTRA physical layer aspects (Release 9). In Technical Specification Group Radio Access Network, 3GPP; Universal Mobile Telecommunications System (UMTS): Sophia Antipolis, France, 2010.
- TR 36.942 (V10.2.0): Radio Frequency (RF) system scenarios (Release 10). In Technical Specification Group Radio Access Network, 3GPP; Universal Mobile Telecommunications System (UMTS): Sophia Antipolis, France, 2011.
- NS3 OnOffApplication Class Reference. Available online: https://www.nsnam.org/doxygen/classns3_1_1_on_off_application.html (accessed on 20 June 2021).
- iLab Video Gene Big Data Team. Video Big Data: The Top 10 Most Demanding Videos on the Net. In Video Big Data Report; iLab Video Gene Big Data Team: Shenzhen, China, 2017. [Google Scholar]
- NS3 UdpTraceClient Class Reference. 2021. Available online: https://www.nsnam.org/doxygen/structns3_1_1_udp_trace_client.html (accessed on 20 June 2021).
- 3GPP HTTP applications, NS3. 2021. Available online: https://www.nsnam.org/docs/models/html/applications.html (accessed on 20 June 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Linguistic Terms for the Membership Functions | Linguistic Terms for the Membership Functions | Linguistic Terms for the Membership Functions | Interval-Valued Icosagonal Fuzzy Number |
|---|---|---|---|
| Absolutely Bad (AB) | Absolutely Poor (AP) | Absolutely Unsatisfactory (AU) | [(0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.008, 0.023, 0.038, 0.053, 0.068, 0.083, 0.098, 0.113, 0.128, 0.143, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.006, 0.018, 0.030, 0.042, 0.054, 0.066, 0.078, 0.090, 0.102, 0.114, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Too Bad (TB) | Very Poor (VP) | Very Unsatisfactory (VU) | [(0, 0, 0, 0, 0.028, 0.043, 0.058, 0.074, 0.089, 0.104, 0.119, 0.134, 0.149, 0.164, 0.179, 0.194, 0.209, 0.224, 0.239, 0.254, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0, 0.009, 0.021, 0.033, 0.045, 0.057, 0.069, 0.081, 0.093, 0.105, 0.117, 0.129, 0.141, 0.153, 0.165, 0.177, 0.189, 0.201, 0.213, 0.225, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Bad (B) | Poor (P) | Unsatisfactory (U) | [(0.079, 0.094, 0.109, 0.124, 0.140, 0.155, 0.170, 0.185, 0.200, 0.215, 0.230, 0.245, 0.260, 0.275, 0.290, 0.305, 0.320, 0.335, 0.350, 0.365, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.108, 0.120, 0.132, 0.144, 0.156, 0.168, 0.180, 0.192, 0.204, 0.216, 0.228, 0.240, 0.252, 0.264, 0.276, 0.288, 0.300, 0.312, 0.324, 0.337, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Less than Enough (LE) | Less than Medium (LM) | Less than Acceptable (LA) | [(0.190, 0.206, 0.221, 0.236, 0.251, 0.266, 0.281, 0.296, 0.311, 0.326, 0.341, 0.356, 0.371, 0.386, 0.401, 0.416, 0.431, 0.446, 0.461, 0.476, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.219, 0.231, 0.243, 0.255, 0.267, 0.279, 0.291, 0.303, 0.315, 0.327, 0.339, 0.351, 0.363, 0.375, 0.387, 0.399, 0.412, 0.424, 0.436, 0.448, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Enough (EN) | Medium (M) | Acceptable (A) | [(0.302, 0.317, 0.332, 0.347, 0.362, 0.377, 0.392, 0.407, 0.422, 0.437, 0.452, 0.467, 0.482, 0.497, 0.512, 0.527, 0.542, 0.557, 0.572, 0.587, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.330, 0.342, 0.354, 0.366, 0.378, 0.390, 0.402, 0.414, 0.426, 0.438, 0.450, 0.462, 0.475, 0.487, 0.499, 0.511, 0.523, 0.535, 0.547, 0.559, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| More than Enough (ME) | More than Medium (MM) | More than Acceptable (MA) | [(0.413, 0.428, 0.443, 0.458, 0.473, 0.488, 0.503, 0.518, 0.533, 0.548, 0.563, 0.578, 0.593, 0.608, 0.623, 0.638, 0.653, 0.668, 0.683, 0.698, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.441, 0.453, 0.465, 0.477, 0.489, 0.501, 0.513, 0.525, 0.538, 0.550, 0.562, 0.574, 0.586, 0.598, 0.610, 0.622, 0.634, 0.646, 0.658 0.670, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Less than Excellent (LE) | Less than Good (LG) | Slightly Satisfactory (SS) | [(0.524, 0.539, 0.554, 0.569, 0.584, 0.599, 0.614, 0.629, 0.644, 0.659, 0.674, 0.689, 0.704, 0.719, 0.734, 0.749, 0.764, 0.779, 0.794, 0.810, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.552, 0.564, 0.576, 0.588, 0.601, 0.613, 0.625, 0.637, 0.649, 0.661, 0.673, 0.685, 0.697, 0.709, 0.721, 0.733, 0.745, 0.757, 0.769, 0.781, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Almost Excellent (AE) | Good (G) | Satisfactory (S) | [(0.635, 0.650, 0.665, 0.680, 0.695, 0.710, 0.725, 0.740, 0.755, 0.770, 0.785, 0.800, 0.815, 0.830, 0.845, 0.860, 0.876, 0.891, 0.906, 0.921, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.663, 0.676, 0.688, 0.700, 0.712, 0.724, 0.736, 0.748, 0.760, 0.772, 0.784, 0.796, 0.808, 0.820, 0.832, 0.844, 0.856, 0.868, 0.880, 0.892, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Excellent (EX) | More than Good (MG) | Very Satisfactory (VS) | [(0.746, 0.761, 0.776, 0.791, 0.806, 0.821, 0.836, 0.851, 0.866, 0.881, 0.896, 0.911, 0.926, 0.942, 0.957, 0.972, 0.987, 1, 1, 1, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.775, 0.787, 0.799, 0.811, 0.823, 0.835, 0.847, 0.859, 0.871, 0.883, 0.895, 0.907, 0.919, 0.931, 0.943, 0.955, 0.967, 0.979, 0.991, 1, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Absolutely Excellent (AX) | Absolutely Good (AG) | Absolutely Satisfactory (AS) | [(0.857, 0.872, 0.887, 0.902, 0.917, 0.932, 0.947, 0.962, 0.977, 0.992, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.886, 0.898, 0.910, 0.922, 0.934, 0.946, 0.958, 0.970, 0.982, 0.994, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Rule | Operator | |||
|---|---|---|---|---|
| 1 | AB | and | AP | AU |
| 2 | AB | and | VP | AU |
| 3 | AB | and | P | AU |
| 4 | AB | and | LM | AU |
| 5 | AB | and | M | AU |
| 6 | AB | and | MM | AU |
| 7 | AB | and | LG | AU |
| 8 | AB | and | G | AU |
| 9 | AB | and | MG | AU |
| 10 | AB | and | AG | AU |
| 11 | TB | and | AP | AU |
| 12 | TB | and | VP | AU |
| 13 | TB | and | P | AU |
| 14 | TB | and | LM | AU |
| 15 | TB | and | M | AU |
| 16 | TB | and | MM | VU |
| 17 | TB | and | LG | VU |
| 18 | TB | and | G | VU |
| 19 | TB | and | MG | VU |
| 20 | TB | and | AG | VU |
| 21 | B | and | AP | AU |
| 22 | B | and | VP | AU |
| 23 | B | and | P | AU |
| 24 | B | and | LM | VU |
| 25 | B | and | M | VU |
| 26 | B | and | MM | VU |
| 27 | B | and | LG | U |
| 28 | B | and | G | U |
| 29 | B | and | MG | U |
| 30 | B | and | AG | U |
| 31 | LE | and | AP | AU |
| 32 | LE | and | VP | AU |
| 33 | LE | and | P | VU |
| 34 | LE | and | LM | VU |
| 35 | LE | and | M | VU |
| 36 | LE | and | MM | U |
| 37 | LE | and | LG | U |
| 38 | LE | and | G | LA |
| 39 | LE | and | MG | LA |
| 40 | LE | and | AG | LA |
| 41 | EN | and | AP | AU |
| 42 | EN | and | VP | AU |
| 43 | EN | and | P | VU |
| 44 | EN | and | LM | VU |
| 45 | EN | and | M | U |
| 46 | EN | and | MM | U |
| 47 | EN | and | LG | LA |
| 48 | EN | and | G | LA |
| 49 | EN | and | MG | A |
| 50 | EN | and | AG | A |
| 51 | ME | and | AP | AU |
| 52 | ME | and | VP | VU |
| 53 | ME | and | P | VU |
| 54 | ME | and | LM | U |
| 55 | ME | and | M | U |
| 56 | ME | and | MM | LA |
| 57 | ME | and | LG | A |
| 58 | ME | and | G | A |
| 59 | ME | and | MG | MA |
| 60 | ME | and | AG | MA |
| 61 | LE | and | AP | AU |
| 62 | LE | and | VP | VU |
| 63 | LE | and | P | U |
| 64 | LE | and | LM | U |
| 65 | LE | and | M | LA |
| 66 | LE | and | MM | A |
| 67 | LE | and | LG | A |
| 68 | LE | and | G | MA |
| 69 | LE | and | MG | SS |
| 70 | LE | and | AG | SS |
| 71 | AE | and | AP | AU |
| 72 | AE | and | VP | VU |
| 73 | AE | and | P | U |
| 74 | AE | and | LM | LA |
| 75 | AE | and | M | LA |
| 76 | AE | and | MM | A |
| 77 | AE | and | LG | MA |
| 78 | AE | and | G | SS |
| 79 | AE | and | MG | S |
| 80 | AE | and | AG | S |
| 81 | EX | and | AP | AU |
| 82 | EX | and | VP | VU |
| 83 | EX | and | P | U |
| 84 | EX | and | LM | LA |
| 85 | EX | and | M | A |
| 86 | EX | and | MM | MA |
| 87 | EX | and | LG | SS |
| 88 | EX | and | G | S |
| 89 | EX | and | MG | VS |
| 90 | EX | and | AG | VS |
| 91 | AX | and | AP | AU |
| 92 | AX | and | VP | VU |
| 93 | AX | and | P | U |
| 94 | AX | and | LM | LA |
| 95 | AX | and | M | A |
| 96 | AX | and | MM | MA |
| 97 | AX | and | LG | SS |
| 98 | AX | and | G | S |
| 99 | AX | and | MG | VS |
| 100 | AX | and | AG | AS |
| Name | Uplink Spectrum | Downlink Spectrum | LTE Band Number | ||
|---|---|---|---|---|---|
| From | To | From | To | ||
| LTE-V2X 1 | 703 MHz | 723 MHz | 758 MHz | 778 MHz | 28 |
| LTE-V2X 2 | 832 MHz | 852 MHz | 800 MHz | 820 MHz | 20 |
| LTE-V2X 3 | 1630 MHz | 1650 MHz | 1525 MHz | 1545 MHz | 24 |
| LTE-V2X 4 | 1710 MHz | 1730 MHz | 1805 MHz | 1825 MHz | 3 |
| LTE-V2X 5 | 1730 MHz | 1750 MHz | 1825 MHz | 1845 MHz | 3 |
| LTE-V2X 6 | 1750 MHz | 1770 MHz | 1845 MHz | 1865 MHz | 3 |
| LTE-V2X 7 | 1900 MHz | 1920 MHz | 2600 MHz | 2620 MHz | 15 |
| LTE-V2X 8 | 1920 MHz | 1940 MHz | 2110 MHz | 2130 MHz | 1 |
| LTE-V2X 9 | 1940 MHz | 1960 MHz | 2130 MHz | 2150 MHz | 1 |
| ARN 1 | 1960 MHz | 1980 MHz | 2150 MHz | 2170 MHz | 1 |
| ARN 2 | 2000 MHz | 2020 MHz | 2180 MHz | 2200 MHz | 23 |
| ARN 3 | 2500 MHz | 2520 MHz | 2620 MHz | 2640 MHz | 7 |
| ARN 4 | 2520 MHz | 2540 MHz | 2640 MHz | 2660 MHz | 7 |
| ARN 5 | 2540 MHz | 2560 MHz | 2660 MHz | 2680 MHz | 7 |
| ARN 6 | 3410 MHz | 3430 MHz | 3510 MHz | 3530 MHz | 22 |
| ARN 7 | 3430 MHz | 3450 MHz | 3530 MHz | 3550 MHz | 22 |
| ARN 8 | 3450 MHz | 3470 MHz | 3550 MHz | 3570 MHz | 22 |
| ARN 9 | 3470 MHz | 3490 MHz | 3570 MHz | 3590 MHz | 22 |
| RSU | Geographic Latitude, Geographic Longitude |
|---|---|
| LTE-V2X 1 | 37.941746, 23.647962 |
| LTE-V2X 2 | 37.942985, 23.649007 |
| LTE-V2X 3 | 37.944259, 23.650166 |
| LTE-V2X 4 | 37.941141, 23.649080 |
| LTE-V2X 5 | 37.942303, 23.650272 |
| LTE-V2X 6 | 37.943664, 23.651470 |
| LTE-V2X 7 | 37.940304, 23.650710 |
| LTE-V2X 8 | 37.941564, 23.651784 |
| LTE-V2X 9 | 37.942847, 23.652859 |
| ARN | Possible Position: Geographic Latitude, Geographic Longitude |
| ARN 1 | 1a: 37.941630, 23.646994 - 1b: 37.942107, 23.647428 - 1c: 37.942617, 23.647842 - 1d: 37.942334, 23.648342 1e: 37.941989, 23.648996 - 1f: 37.941489, 23.648520 - 1g: 37.941061, 23.648098 - 1h: 37.941347, 23.647473 |
| ARN 2 | 2a: 37.942795, 23.647994 - 2b: 37.943256, 23.648375 - 2c: 37.943846, 23.648896 - 2d: 37.942317, 23.648341 2e: 37.943244, 23.650030 - 2f: 37.942758, 23.649617 - 2g: 37.942224, 23.649160 - 2h: 37.942592, 23.648570 |
| ARN 3 | 3a: 37.944008, 23.649037 - 3b: 37.944502, 23.649430 - 3c: 37.945053, 23.649887 - 3d: 37.944801, 23.650429 3e: 37.944441, 23.651041 - 3f: 37.943850, 23.650572 - 3g: 37.943340, 23.650169 - 3h: 37.943895, 23.649658 |
| ARN 4 | 4a: 37.940950, 23.648250 - 4b: 37.941363, 23.648619 - 4c: 37.941887, 23.649127 - 4d: 37.941560, 23.649751 4e: 37.941251, 23.650302 - 4f: 37.940781, 23.649910 - 4g: 37.940312, 23.649487 - 4h: 37.940622, 23.648926 |
| ARN 5 | 5a: 37.942098, 23.649270 - 5b: 37.942664, 23.649770 - 5c: 37.943085, 23.650107 - 5d: 37.942806, 23.650774 5e: 37.942424, 23.651281 - 5f: 37.941937, 23.650920 - 5g: 37.941428, 23.650485 - 5h: 37.941747, 23.649841 |
| ARN 6 | 6a: 37.943197, 23.650268 - 6b: 37.943756, 23.650725 - 6c: 37.944339, 23.651194 - 6d: 37.944011, 23.651859 6e: 37.943743, 23.652401 - 6f: 37.943079, 23.651867 - 6g: 37.942682, 23.651530 - 6h: 37.943041, 23.650980 |
| ARN 7 | 7a: 37.940158, 23.649763 - 7b: 37.940619, 23.650154 - 7c: 37.941137, 23.650589 - 7d: 37.940896, 23.651039 7e: 37.940459, 23.651762 - 7f: 37.940014, 23.651017 - 7g: 37.939674, 23.650724 - 7h: 37.939901, 23.650201 |
| ARN 8 | 8a: 37.941282, 23.650730 - 8b: 37.941817, 23.651155 - 8c: 37.942236, 23.651555 - 8d: 37.942084, 23.652112 8e: 37.941714, 23.652786 - 8f: 37.941344, 23.652356 - 8g: 37.940726, 23.651990 - 8h: 37.941091, 23.651150 |
| ARN 9 | 9a: 37.942586, 23.651776 - 9b: 37.942974, 23.652134 - 9c: 37.943596, 23.652687 - 9d: 37.943346, 23.653167 9e: 37.942959, 23.653872 - 9f: 37.942377, 23.653362 - 9g: 37.941902, 23.652866 - 9h: 37.942278, 23.652275 |
| Service | 5QI Value | Resource Type | Priority Level | Packet Delay Budget | Packet Error Rate |
|---|---|---|---|---|---|
| Autonomous Navigation (ANav) | 81 | Delay Critical GBR | 11 | 5 ms | |
| Conversational Voice (CVo) | 1 | GBR | 20 | 100 ms | |
| Conversational Video (CVi) | 2 | GBR | 40 | 150 ms | |
| Web Browsing (WB) | 6 | Non-GBR | 60 | 300 ms |
| Parameter | Value |
|---|---|
| Simulation duration | 86,400 s (24 h) |
| LTE-V2X RSUs count | 9 LTE-V2X RSUs |
| ARNs count | 1 UAV per RSU |
| Average communication range of each RSU | 100 m |
| Average communication range of each ARN | 100 m |
| Number of vehicles in the area of each RSU | Simulation run 1: 10 vehicles Simulation run 2: 20 vehicles Simulation run 3: 30 vehicles Simulation run 4: 40 vehicles Simulation run 5: 50 vehicles |
| Vehicles’ mobility pattern | According to OpenStreetMap (OSM) data |
| ARNs mobility pattern | Stationary |
| Average velocity of vehicles | 9 m/s |
| Average height of buildings exist in the map | 30 m |
| Default altitude of ARNs | 1 × Average_Buildings_Height = 30 m |
| Services | Autonomous Navigation (ANav) - Average datarate per flow: 0.6 Mbps - Simulated data type: TCP data traffic - Used NS3 module: NS3 OnOffApplication [59] |
| Conversational Voice (CVo) - Average datarate per flow: 200 kbps - Simulated data type: Voice over IP (VoIP) with G.729 codec - Used NS3 module: NS3 OnOffApplication [59] | |
| Conversational Video (CVi) - Average datarate per flow: 35.3 Mbps (according to Huawei specifications for 4K video with frame rate equal to 60 Frames per Second (FPS) [60] - Simulated data type: Live MP4 video - Used NS3 module: NS3 UDPTraceClient [61] using MP4 video trace | |
| Web Browsing (WB) - Average datarate per flow: 8.0 Mbps - Simulated data type: HTTP data traffic - Used NS3 module: ThreeGppHttpClient [62] |
| Linguistic Terms Used for the Vehicles’ Density Criterion | Linguistic Terms Used for the RSU SINR Criterion | Linguistic Terms Used for the Vehicles’ Services Average Priorities Criterion | Interval-Valued Icosagonal Fuzzy Number |
|---|---|---|---|
| Very Low Vehicles’ Density (VLVD) | Very Low SINR (VLS) | Very Low Service Priority (VLSP) | [(0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.026, 0.079, 0.132, 0.184, 0.237, 0.289, 0.342, 0.395, 0.447, 0.500, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.021, 0.063, 0.105, 0.147, 0.189, 0.232, 0.274, 0.316, 0.358, 0.400, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Low Vehicles’ Density (LVD) | Low SINR (LS) | Low Service Priority (LSP) | [(0, 0, 0, 0, 0, 0.013, 0.066, 0.118, 0.171, 0.224, 0.276, 0.329, 0.382, 0.434, 0.487, 0.539, 0.592, 0.645, 0.697, 0.750, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0, 0, 0, 0, 0.018, 0.061, 0.103, 0.145, 0.187, 0.229, 0.271, 0.313, 0.355, 0.397, 0.439, 0.482, 0.524, 0.566, 0.608, 0.650, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Medium Vehicles’ Density (MVD) | Medium SINR (MS) | Medium Service Priority (MSP) | [(0, 0.053, 0.105, 0.158, 0.211, 0.263, 0.316, 0.368, 0.421, 0.474, 0.526, 0.579, 0.632, 0.684, 0.737, 0.789, 0.842, 0.895, 0.947, 1, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.100, 0.142, 0.184, 0.226, 0.268, 0.311, 0.353, 0.395, 0.437, 0.479, 0.521, 0.563, 0.605, 0.647, 0.689, 0.732, 0.774, 0.816, 0.858, 0.900, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| High Vehicles’ Density (HVD) | High SINR (HS) | High Service Priority (HSP) | [(0.250, 0.303, 0.355, 0.408, 0.461, 0.513, 0.566, 0.618, 0.671, 0.724, 0.776, 0.829, 0.882, 0.934, 0.987, 1, 1, 1, 1, 1, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.350, 0.392, 0.434, 0.476, 0.518, 0.561, 0.603, 0.645, 0.687, 0.729, 0.771, 0.813, 0.855, 0.897, 0.939, 0.982, 1, 1, 1, 1, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| Very High Vehicles’ Density (VHVD) | Very High SINR (VHS) | Very High Service Priority (VHSP) | [(0.500, 0.553, 0.605, 0.658, 0.711, 0.763, 0.816, 0.868, 0.921, 0.974, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0.20, 0.40, 0.60, 0.80, 0.80, 0.60, 0.40, 0.20), (0.600, 0.642, 0.684, 0.726, 0.768, 0.811, 0.853, 0.895, 0.937, 0.979, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0.8, 0.08, 0.26, 0.44, 0.62, 0.62, 0.44, 0.26, 0.08)] |
| RSU | Average Distance between the Alternative Positions () | Average Velocity of Vehicles () | Estimated Time Interval () |
|---|---|---|---|
| 1 | 142.85 m | 8.33 m/s | 17.14 s |
| 2 | 142.85 m | 5.55 m/s | 25.73 s |
| 3 | 142.85 m | 5.55 m/s | 25.73 s |
| 4 | 142.85 m | 8.33 m/s | 17.14 s |
| 5 | 142.85 m | 9.72 m/s | 14.69 s |
| 6 | 142.85 m | 11.11 m/s | 12.85 s |
| 7 | 142.85 m | 4.16 m/s | 34.33 s |
| 8 | 142.85 m | 4.16 m/s | 34.33 s |
| 9 | 142.85 m | 2.77 m/s | 51.57 s |
| RSU Serving the Corresponding Area | Mostly Selected ARN Position for the Second Case (Randomly) | Mostly Selected ARN Position for the Third Case (Using the IFT Algorithm) |
|---|---|---|
| LTE-V2X 1 | 1h | 1d |
| LTE-V2X 2 | 2b | 2g |
| LTE-V2X 3 | 3b | 3d |
| LTE-V2X 4 | 4h | 4e |
| LTE-V2X 5 | 5c | 5f |
| LTE-V2X 6 | 6a | 6e |
| LTE-V2X 7 | 7f | 7c |
| LTE-V2X 8 | 8d | 8c |
| LTE-V2X 9 | 9h | 9d |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skondras, E.; Michailidis, E.T.; Michalas, A.; Vergados, D.J.; Miridakis, N.I.; Vergados, D.D. A Network Slicing Framework for UAV-Aided Vehicular Networks. Drones 2021, 5, 70. https://doi.org/10.3390/drones5030070
Skondras E, Michailidis ET, Michalas A, Vergados DJ, Miridakis NI, Vergados DD. A Network Slicing Framework for UAV-Aided Vehicular Networks. Drones. 2021; 5(3):70. https://doi.org/10.3390/drones5030070
Chicago/Turabian StyleSkondras, Emmanouil, Emmanouel T. Michailidis, Angelos Michalas, Dimitrios J. Vergados, Nikolaos I. Miridakis, and Dimitrios D. Vergados. 2021. "A Network Slicing Framework for UAV-Aided Vehicular Networks" Drones 5, no. 3: 70. https://doi.org/10.3390/drones5030070
APA StyleSkondras, E., Michailidis, E. T., Michalas, A., Vergados, D. J., Miridakis, N. I., & Vergados, D. D. (2021). A Network Slicing Framework for UAV-Aided Vehicular Networks. Drones, 5(3), 70. https://doi.org/10.3390/drones5030070