
Processing and Interpretation of UAV Magnetic Data: A Workflow Based on Improved Variational Mode Decomposition and Levenberg–Marquardt Algorithm


Abstract
:1. Introduction
- A complete workflow based on the improved VMD, and the joint Euler deconvolution-LM algorithm is proposed for the processing and interpretation of UAV magnetic data.
- The VMD method is applied for the processing of UAV magnetic data, and the decomposition modes number K is adaptively determined according to the mode characteristics.
- The positioning accuracy of near-surface targets is significantly improved by combining Euler deconvolution and the LM algorithm without increasing too much complexity, which is very helpful for the follow-up work.
2. Theoretical Background
2.1. Magnetic Data Processing
2.1.1. VMD Algorithm
2.1.2. The Improved VMD Algorithm
- The starting point is to determine the following parameters: the minimum mode number , the maximum mode number , the threshold , and the penalty parameter ;
- Let , perform VMD on the input signal , a set of IMFs can be obtained and recorded as , the corresponding center frequencies are recorded as ;
- Let , we can also obtain a set of IMFs and the corresponding center frequencies, namely, , and ;
- Compare and to determine the new center frequency in , and the IMF corresponding to the new center frequency is obtained as ;
- Calculate the correlation coefficients between and ;
- Execute judgement, if “” is true, it means that the decomposition is excessive, then make the optimal decomposition number . Otherwise, continue to implement 3–5 until the criterion is met.
2.2. Magnetic Data Interpretation
2.2.1. Euler Deconvolution
2.2.2. Implementation of the LM Algorithm
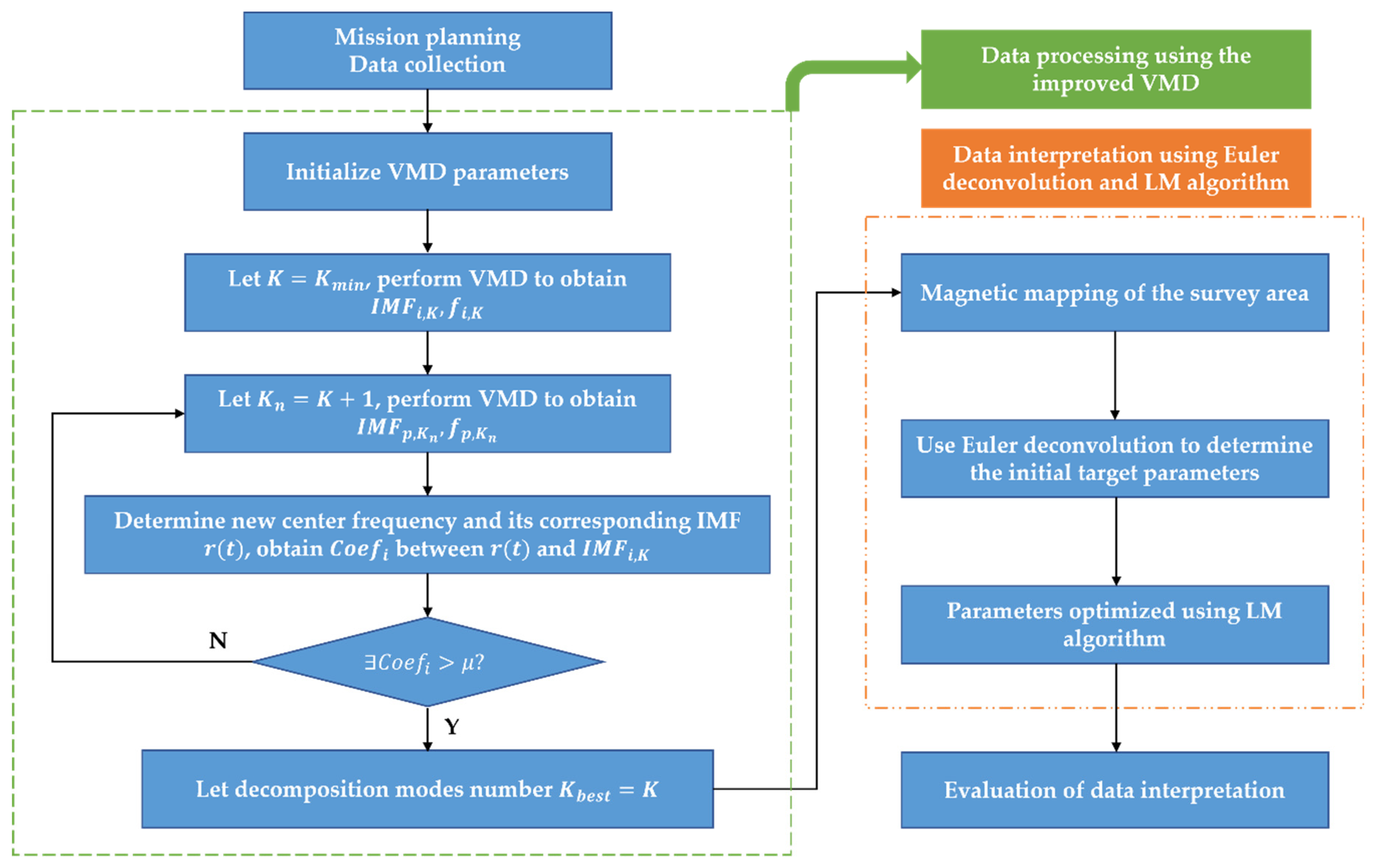
3. The Proposed Workflow Using Improved VMD and Joint Euler-LM Algorithm
| Step 1: | Mission planning is the first step for UAV magnetic survey, many factors, e.g., the survey task, target size, topography of the survey area and weather conditions should be carefully considered to determine the parameters of line spacing, flight altitude and speed. Then, the data collection can be carried out. |
| Step 2: | Data of each flight profile are processed according to the improved VMD method described in Section 2.1.2, then the magnetic map of the survey area is obtained by interpolation. |
| Step 3: | Euler deconvolution is used to obtain the preliminary estimation of target position and magnetic moment, and these results are then used as the initial value of the LM algorithm to obtain more accurate target parameters. |
| Step 4: | The result of data interpretation is finally evaluated according to the real situation, and the follow-up work (e.g., the clearance of the target) can be carried out. |
4. Field Experiments and Analysis
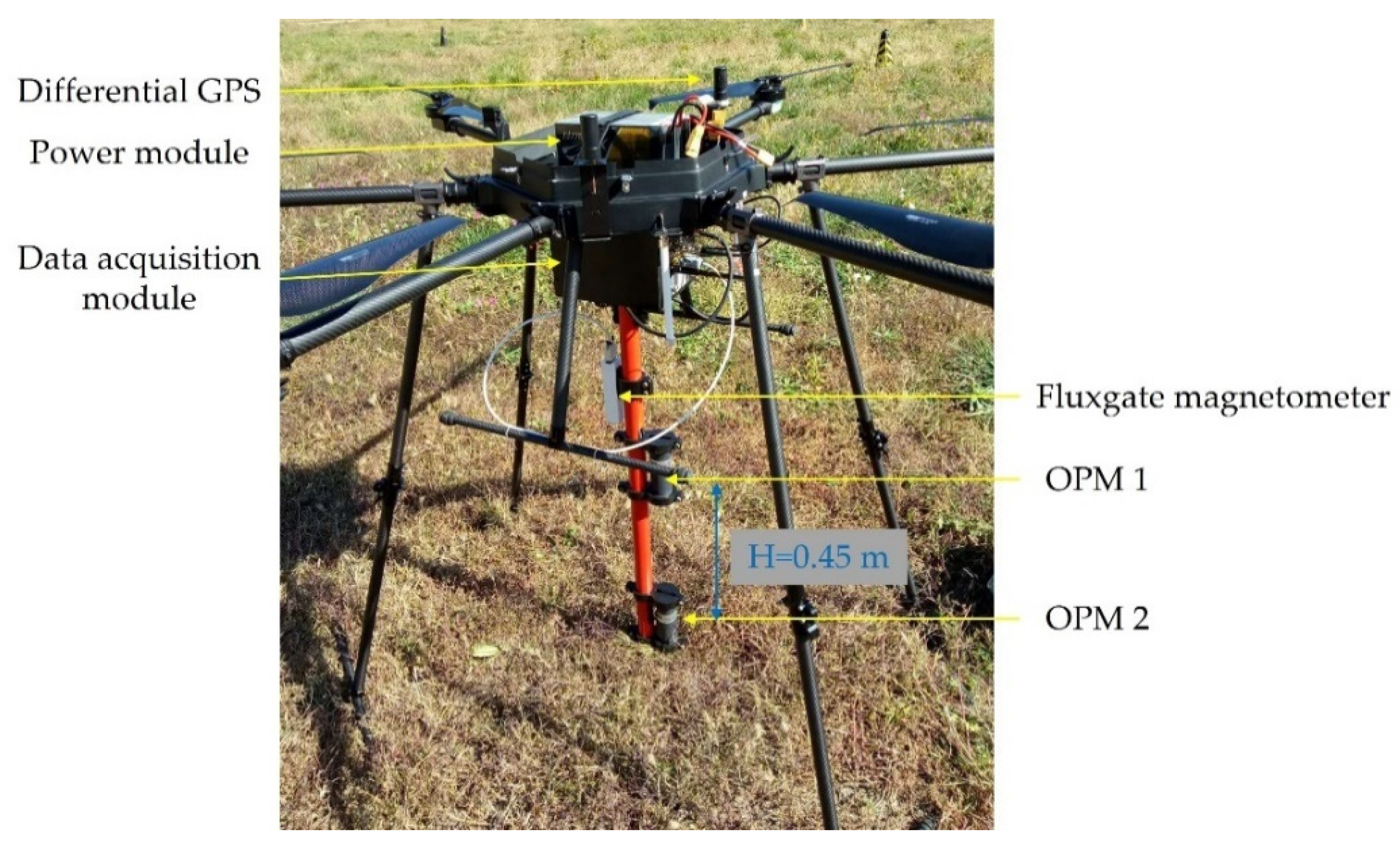
4.1. UAV Magnetic Survey System
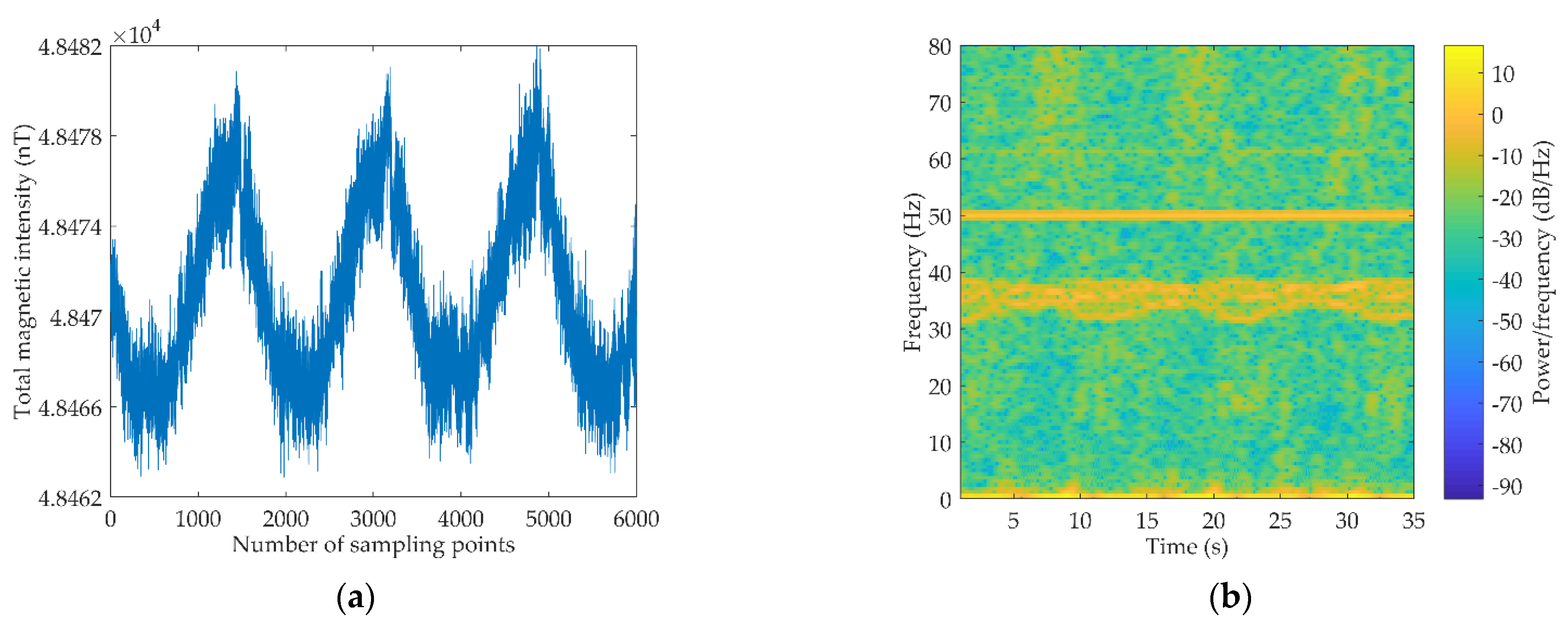
4.2. The Collection of UAV Magnetic Data
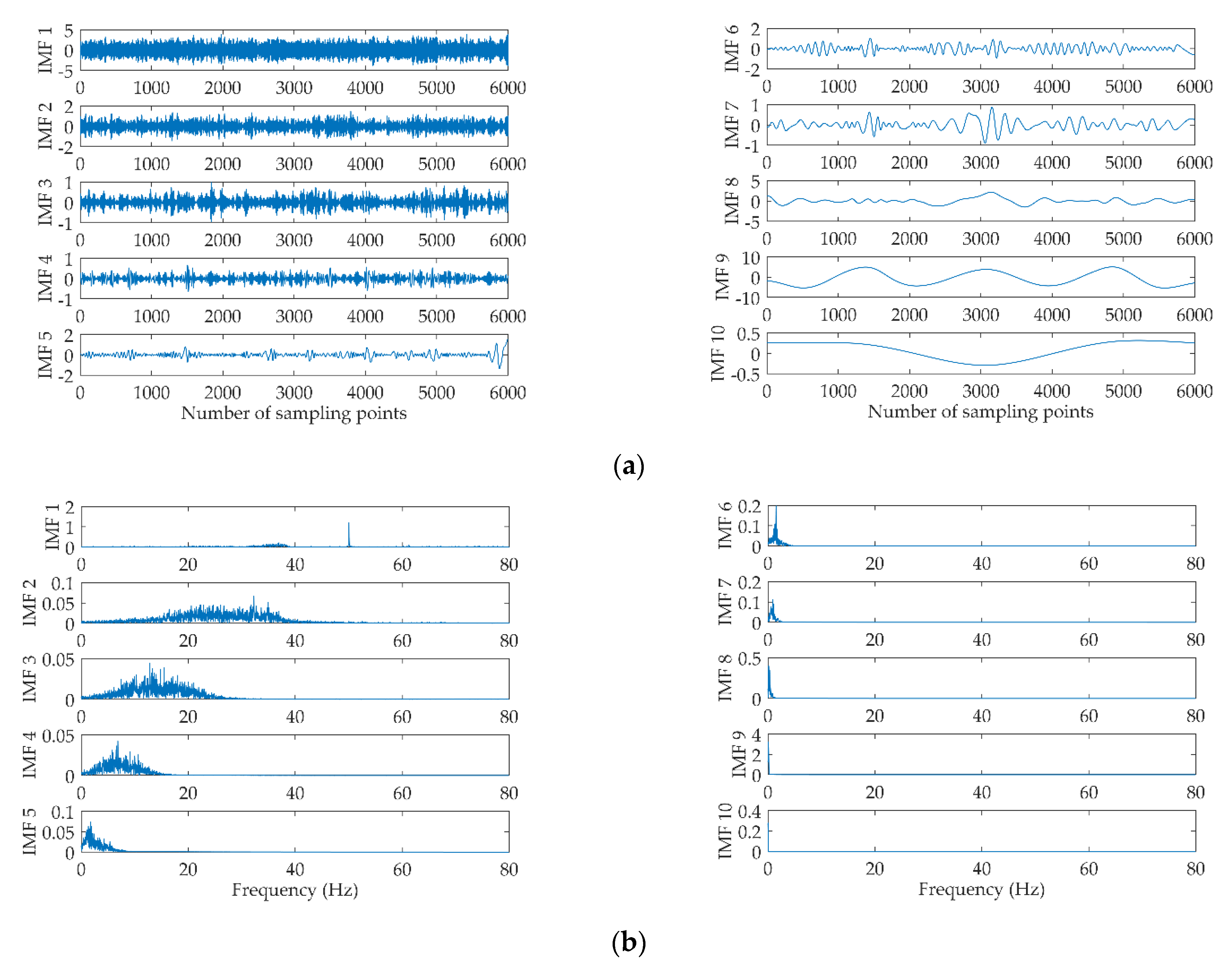
4.3. UAV Magnetic Data Processing
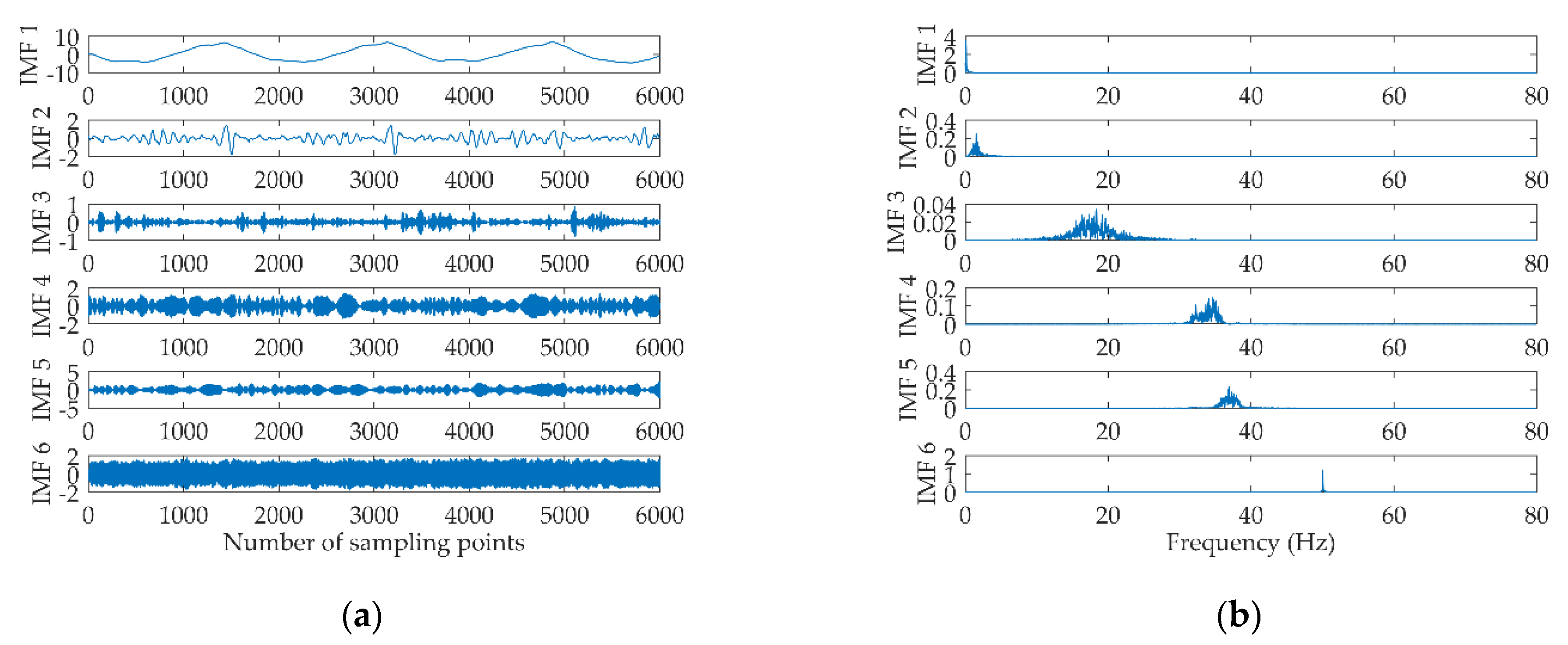
- VMD can significantly reduce the number of IMFs, and each IMF has a relatively clear physical meaning.
- The center frequency of IMF1 is close to DC, which needs to be paid more attention to in the magnetic survey because the anomaly signal caused by the target is also quasi-static.
- The energy of IMF2 is distributed in the frequency band of 0.5-3 Hz, which is the interference related to the maneuver of the UAV.
- IMF3-IMF5 is the interference produced by the UAV platform, which may be related to the airborne electronic equipment.
- The center frequency of IMF6 is 50 Hz, which is the power frequency interference.
4.4. UAV Magnetic Data Interpretation
5. Final Remarks
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Baji, M. Modeling and Simulation of Very High Spatial Resolution UXOs and Landmines in a Hyperspectral Scene for UAV Survey. Remote Sens. 2021, 13, 837. [Google Scholar] [CrossRef]
- Parshin, A.; Morozov, V.; Snegirev, N.; Valkova, E.; Shikalenko, F. Advantages of Gamma-Radiometric and Spectrometric Low-Altitude Geophysical Surveys by Unmanned Aerial Systems with Small Scintillation Detectors. Appl. Sci. 2021, 11, 2247. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.; Xing, K.; Zhang, X. Unmanned Aerial Vehicles for Magnetic Surveys: A Review on Platform Selection and Interference Suppression. Drones 2021, 5, 93. [Google Scholar] [CrossRef]
- Hashimoto, T.; Koyama, T.; Kaneko, T.; Ohminato, T.; Yanagisawa, T.; Yoshimoto, M.; Suzuki, E. Aeromagnetic survey using an unmanned autonomous helicopter over Tarumae Volcano, northern Japan. Explor. Geophys. 2014, 45, 37–42. [Google Scholar] [CrossRef] [Green Version]
- Gailler, L.; Labazuy, P.; Régis, E.; Bontemps, M.; Souriot, T.; Bacques, G.; Carton, B. Validation of a new UAV magnetic prospecting tool for volcano monitoring and geohazard assessment. Remote Sens. 2021, 13, 894. [Google Scholar] [CrossRef]
- Luoma, S.; Zhou, X. Construction of a fluxgate magnetic gradiometer for integration with an unmanned aircraft system. Remote Sens. 2020, 12, 2551. [Google Scholar] [CrossRef]
- Fernandez Romero, S.; Morata Barrado, P.; Rivero Rodriguez, M.A.; Vazquez Yañez, G.A.; De Diego Custodio, E.; Michelena, M.D. Vector magnetometry using remotely piloted aircraft systems: An example of application for planetary exploration. Remote Sens. 2021, 13, 390. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic surveying with a rotary-wing unmanned aircraft system: A case study from a zinc deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2018, 175, 3145–3158. [Google Scholar] [CrossRef]
- Schmidt, V.; Becken, M.; Schmalzl, J. A UAV-borne magnetic survey for archaeological prospection of a Celtic burial site. First Break. 2020, 38, 61–66. [Google Scholar] [CrossRef]
- Shahsavani, H. An aeromagnetic survey carried out using a rotary-wing UAV equipped with a low-cost magneto-inductive sensor. Int. J. Remote Sens. 2021, 42, 1–14. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge. 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. Spectral analysis of magnetometer swing in high-resolution UAV-borne aeromagnetic surveys. In Proceedings of the 2019 IEEE Systems and Technologies for Remote Sensing Applications Through Unmanned Aerial Systems (STRATUS), Rochester, NY, USA, 25–27 February 2019; pp. 1–4. [Google Scholar]
- Mu, Y.; Zhang, X.; Xie, W.; Zheng, Y. Automatic detection of near-surface targets for unmanned aerial vehicle (UAV) magnetic survey. Remote Sens. 2020, 12, 452. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Xu, X.; Huang, C.; Zhu, W.; Liu, X.; Yu, G.; Fang, G. Adaptive cancellation of geomagnetic background noise for magnetic anomaly detection using coherence. Meas. Sci. Technol. 2014, 26, 015008. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.; Xing, K.; Zhang, X. A Novel Noise Reduction Method of UAV Magnetic Survey Data Based on CEEMDAN, Permutation Entropy, Correlation Coefficient and Wavelet Threshold Denoising. Entropy 2021, 23, 1309. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Liu, W.; Cao, S.; Chen, Y. Applications of variational mode decomposition in seismic time-frequency analysis. Geophysics 2016, 81, V365–V378. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. Denoising and feature extraction algorithms using NPE combined with VMD and their applications in ship-radiated noise. Symmetry 2017, 9, 256. [Google Scholar] [CrossRef] [Green Version]
- Ding, J.; Xiao, D.; Li, X. Gear fault diagnosis based on genetic mutation particle swarm optimization VMD and probabilistic neural network algorithm. IEEE Access. 2020, 8, 18456–18474. [Google Scholar] [CrossRef]
- Lahmiri, S.; Boukadoum, M. Biomedical image denoising using variational mode decomposition. In Proceedings of the 2014 IEEE Biomedical Circuits and Systems Conference (BioCAS) Proceedings, Lausanne, Switzerland, 22–24 October 2014; pp. 340–343. [Google Scholar]
- Wang, P.; Gao, Y.; Wu, M.; Zhang, F.; Li, G.; Qin, C. A denoising method for fiber optic gyroscope based on variational mode decomposition and beetle swarm antenna search algorithm. Entropy 2020, 22, 765. [Google Scholar] [CrossRef]
- Lian, J.; Liu, Z.; Wang, H.; Dong, X. Adaptive variational mode decomposition method for signal processing based on mode characteristic. Mech. Syst. Signal Proc. 2018, 107, 53–77. [Google Scholar] [CrossRef]
- Liu, L.; Chen, L.; Wang, Z.; Liu, D. Early fault detection of planetary gearbox based on acoustic emission and improved variational mode decomposition. IEEE Sens. J. 2020, 21, 1735–1745. [Google Scholar] [CrossRef]
- Hinze, W.J.; Von Frese, R.R.; Von Frese, R.; Saad, A.H. Gravity and Magnetic Exploration: Principles, Practices, and Applications; Cambridge University Press: Cambridge, UK, 2013; pp. 338–411. [Google Scholar]
- Reid, A.B.; Allsop, J.; Granser, H.; Millett, A.t.; Somerton, I. Magnetic interpretation in three dimensions using Euler deconvolution. Geophysics 1990, 55, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Mushayandebvu, M.F.; van Driel, P.; Reid, A.B.; Fairhead, J.D. Magnetic source parameters of two-dimensional structures using extended Euler deconvolution. Geophysics. 2001, 66, 814–823. [Google Scholar] [CrossRef]
- Keating, P.; Pilkington, M. Euler deconvolution of the analytic signal and its application to magnetic interpretation. Geophys. Prospect. 2004, 52, 165–182. [Google Scholar] [CrossRef]
- Davis, K.; Li, Y.; Nabighian, M. Automatic detection of UXO magnetic anomalies using extended Euler deconvolution. Geophysics 2010, 75, G13–G20. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, M.; Chen, J. A new multiple magnetic targets location method in 3D space. In SEG Technical Program Expanded Abstracts 2020; Society of Exploration Geophysicists: Tulsa, OK, USA, 2020; pp. 974–978. [Google Scholar]
- Huang, L.; Zhang, H.; Sekelani, S.; Wu, Z. An improved Tilt-Euler deconvolution and its application on a Fe-polymetallic deposit. Ore Geol. Rev. 2019, 114, 103114. [Google Scholar] [CrossRef]
- Ma, G.-Q.; Yong, X.-Y.; Li, L.-L.; Guo, H. Three-dimensional gravitational and magnetic-data acquisition and analysis via a joint-gradient Euler-deconvolution method. Appl. Geophys. 2020, 17, 297–305. [Google Scholar] [CrossRef]
- Ding, X.; Li, Y.; Luo, M.; Chen, J.; Li, Z.; Liu, H. Estimating Locations and Moments of Multiple Dipole-Like Magnetic Sources From Magnetic Gradient Tensor Data Using Differential Evolution. IEEE Trans. Geosci. Remote Sens. 2021. [CrossRef]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Madsen, K.; Nielsen, H.B.; Tingleff, O. Methods for Non-Linear Least Squares Problems; Informatics and Mathematical Modelling, Technical University of Denmark: Copenhagen, Denmark, 2004. [Google Scholar]
- Börlin, N.; Grussenmeyer, P. Bundle adjustment with and without damping. Photogramm. Rec. 2013, 28, 396–415. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chen, X.; Yu, J.; Yang, X.; Yang, H. The data-driven optimization method and its application in feature extraction of ship-radiated noise with sample entropy. Energies 2019, 12, 359. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Ding, W.; Peng, H.; Gu, J.; Shuai, J. Pipe defect detection with remote magnetic inspection and wavelet analysis. Wirel. Pers. Commun. 2017, 95, 2299–2313. [Google Scholar] [CrossRef]
- Sheinker, A.; Shkalim, A.; Salomonski, N.; Ginzburg, B.; Frumkis, L.; Kaplan, B.-Z. Processing of a scalar magnetometer signal contaminated by 1/fα noise. Sens. Actuators A Phys. 2007, 138, 105–111. [Google Scholar] [CrossRef]
- Gang, Y.; Yingtang, Z.; Hongbo, F.; Zhining, L.; Guoquan, R. Detection, localization and classification of multiple dipole-like magnetic sources using magnetic gradient tensor data. J. Appl. Geophys. 2016, 128, 131–139. [Google Scholar] [CrossRef]
- Jackisch, R.; Madriz, Y.; Zimmermann, R.; Pirttijärvi, M.; Saartenoja, A.; Heincke, B.H.; Salmirinne, H.; Kujasalo, J.-P.; Andreani, L.; Gloaguen, R. Drone-borne hyperspectral and magnetic data integration: Otanmäki Fe-Ti-V deposit in Finland. Remote Sens. 2019, 11, 2084. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.; Xie, W.; Zhang, X. The Joint UAV-Borne Magnetic Detection System and Cart-Mounted Time Domain Electromagnetic System for UXO Detection. Remote Sens. 2021, 13, 2343. [Google Scholar] [CrossRef]
- Parshin, A.; Bashkeev, A.; Davidenko, Y.; Persova, M.; Iakovlev, S.; Bukhalov, S.; Grebenkin, N.; Tokareva, M. Lightweight unmanned aerial system for time-domain electromagnetic prospecting—the next stage in applied UAV-Geophysics. Appl. Sci. 2021, 11, 2060. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K | Center Frequency/Hz | Energy Loss Coefficient | |||||
|---|---|---|---|---|---|---|---|
| 4 | 1.45 | 34.45 | 37.32 | 0.2534 | |||
| 5 | 1.43 | 18.81 | 34.49 | 37.74 | 0.2469 | ||
| 6 | 1.41 | 17.86 | 34.02 | 36.99 | 50.04 | 0.0980 | |
| 7 | 1.41 | 17.63 | 32.37 | 35.09 | 37.27 | 50.04 | 0.0939 |
| K | New IMF | Correlation Coefficients | |||||
|---|---|---|---|---|---|---|---|
| 5 | IMF 3 | 0.0031 | 0.0262 | 0.0474 | 0.0294 | ||
| 6 | IMF 6 | 0.0013 | 0.0113 | 0.0783 | 0.1103 | 0.0821 | |
| 7 | IMF 4 | 0.0004 | 0.0030 | 0.0418 | 0.6327 | 0.0832 | 0.0039 |
| Method | Low-Pass Filter | EMD | CEEMDAN | Proposed |
|---|---|---|---|---|
| PE | 0.4362 | 0.4414 | 0.3966 | 0.3091 |
| Processing time/s | 0.112 | 1.008 | 10.145 | 4.305 |
| Parameter | Real | Euler-Deconvolution | Joint Euler-LM Method |
|---|---|---|---|
| Location (m) | (21.802, 21.964, −0.580) | (21.806, 22.117, −0.742) | (21.791, 21.925, −0.526) |
| Magnetic moment (Am2) | - | (−0.044, 0.534, −1.113) | (−0.106, 0.630, −1.235) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Li, S.; Xing, K.; Zhang, X. Processing and Interpretation of UAV Magnetic Data: A Workflow Based on Improved Variational Mode Decomposition and Levenberg–Marquardt Algorithm. Drones 2022, 6, 11. https://doi.org/10.3390/drones6010011
Zheng Y, Li S, Xing K, Zhang X. Processing and Interpretation of UAV Magnetic Data: A Workflow Based on Improved Variational Mode Decomposition and Levenberg–Marquardt Algorithm. Drones. 2022; 6(1):11. https://doi.org/10.3390/drones6010011
Chicago/Turabian StyleZheng, Yaoxin, Shiyan Li, Kang Xing, and Xiaojuan Zhang. 2022. "Processing and Interpretation of UAV Magnetic Data: A Workflow Based on Improved Variational Mode Decomposition and Levenberg–Marquardt Algorithm" Drones 6, no. 1: 11. https://doi.org/10.3390/drones6010011
APA StyleZheng, Y., Li, S., Xing, K., & Zhang, X. (2022). Processing and Interpretation of UAV Magnetic Data: A Workflow Based on Improved Variational Mode Decomposition and Levenberg–Marquardt Algorithm. Drones, 6(1), 11. https://doi.org/10.3390/drones6010011