
A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms


Abstract
:1. Introduction
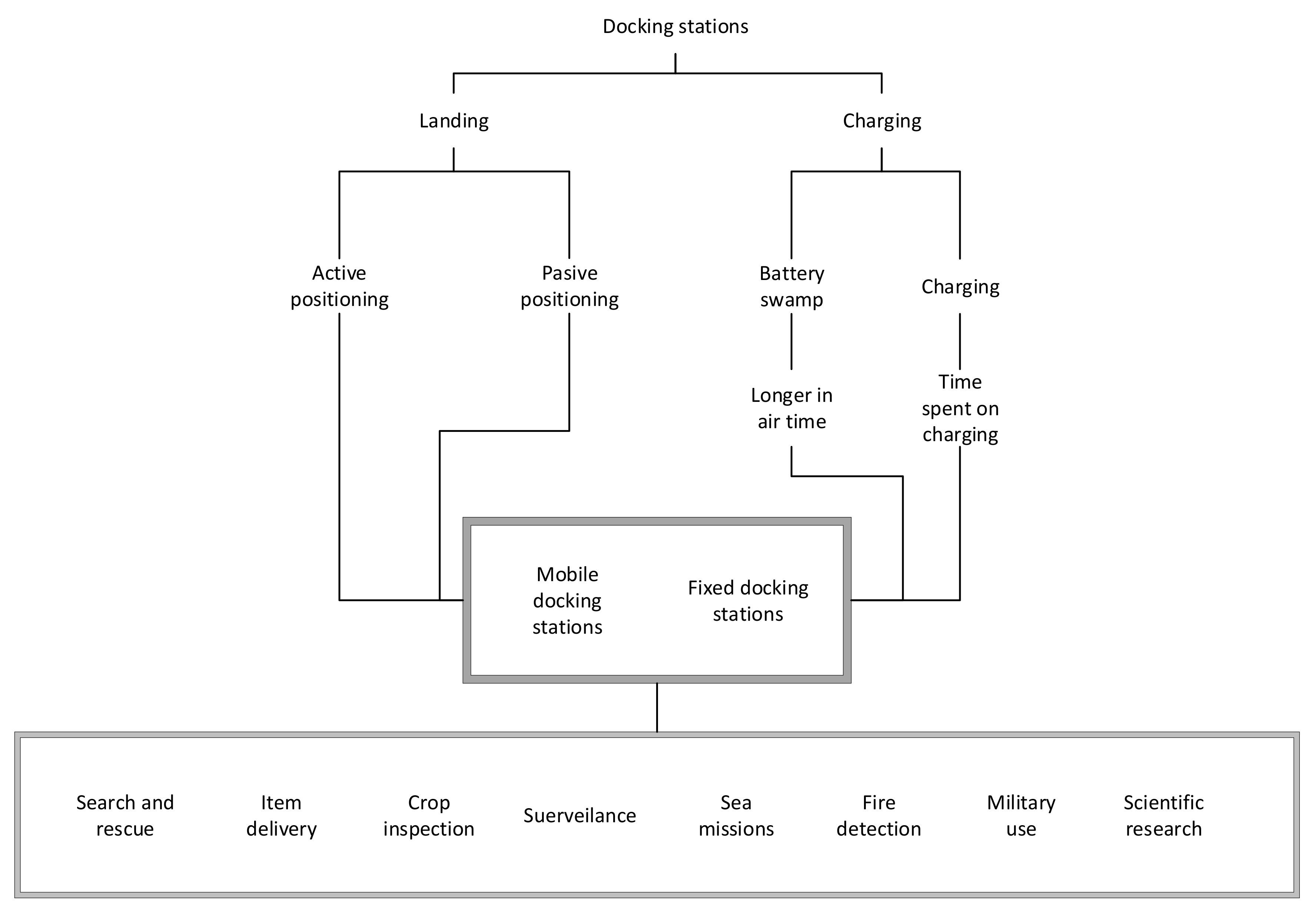
2. UAV Docking Station—Preliminary Description
- Mobility (mobile and fixed);
- Charging method (two electrodes, multiple electrodes, wireless, etc.);
- Automatic battery exchange (spare batteries recharging);
- Positioning (active and passive);
- Drone storage (yes or no);
- Package delivery (storage, no storage);
- Type of landing (precision, vision-based, etc.);
- Type of landing platform (self-leveling).
2.1. Landing System
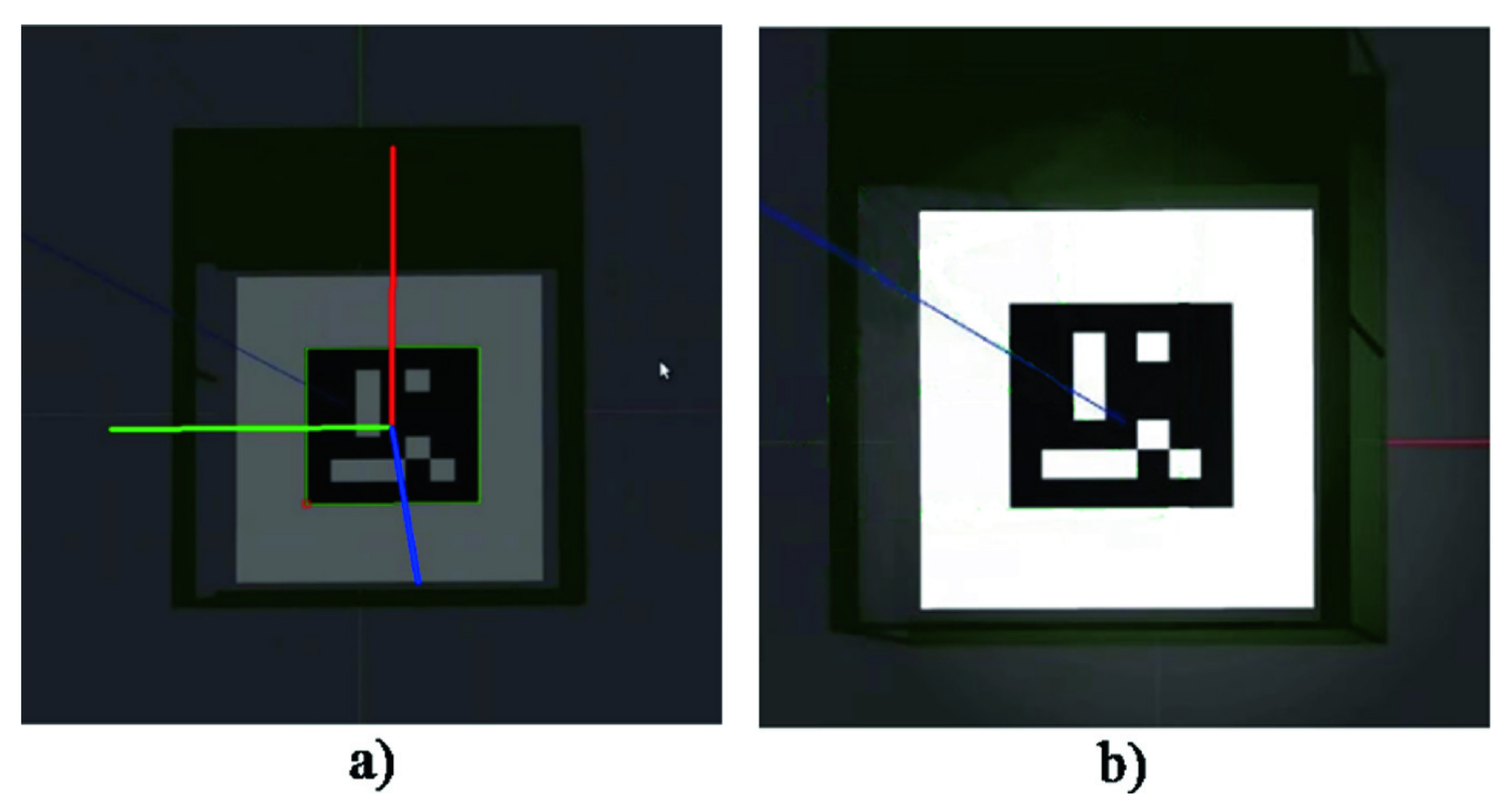
2.1.1. Precise Positioning (in Air)
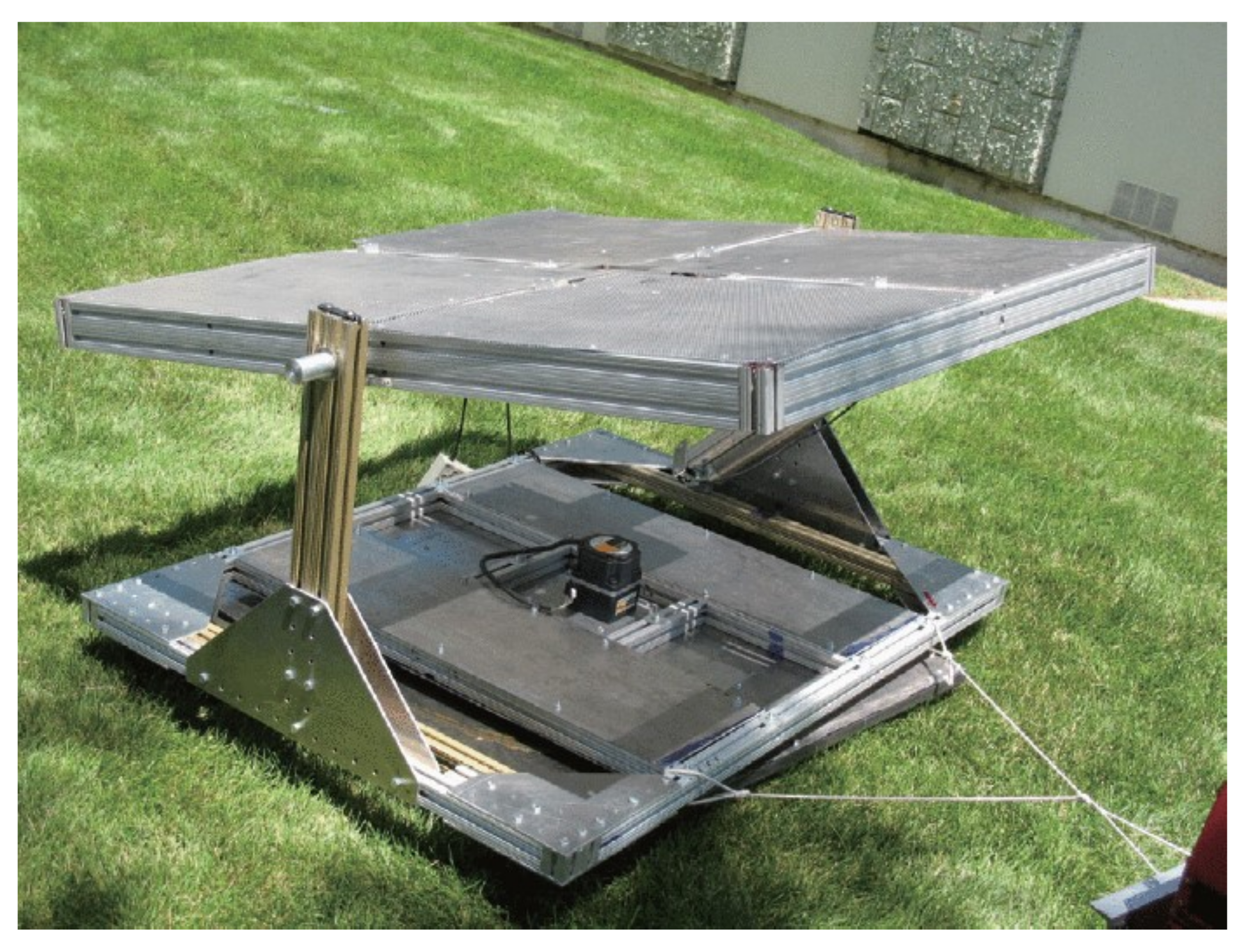
2.1.2. Landing Platform
- Positioning: active or passive;
- Orientation: self-leveling, fixed or tilted;
- Power: charging electrodes or wireless charging;
- Vision: visual tags and/or lights.
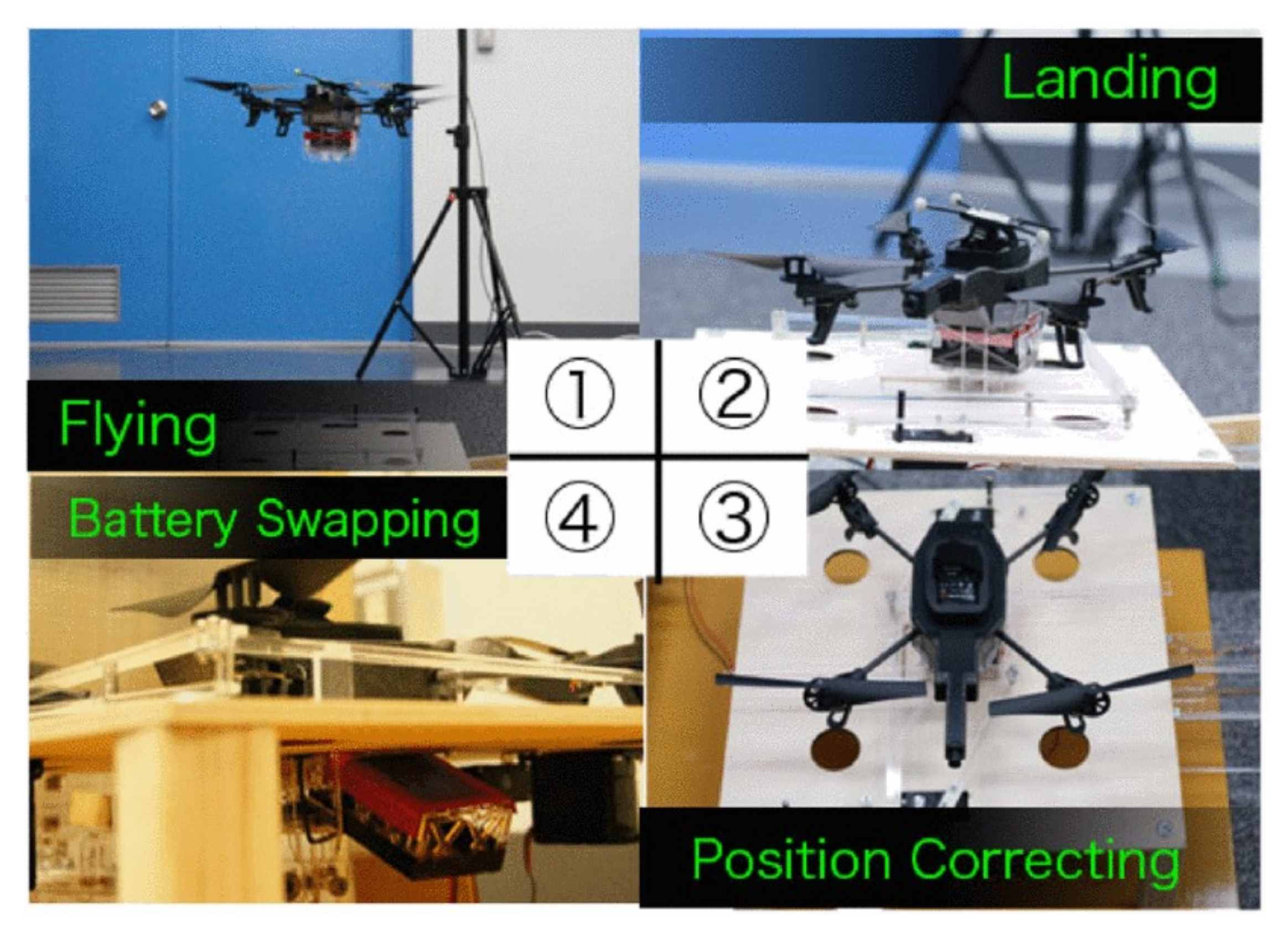
2.2. Battery Management System
2.3. Storage System
2.4. Data Transfer
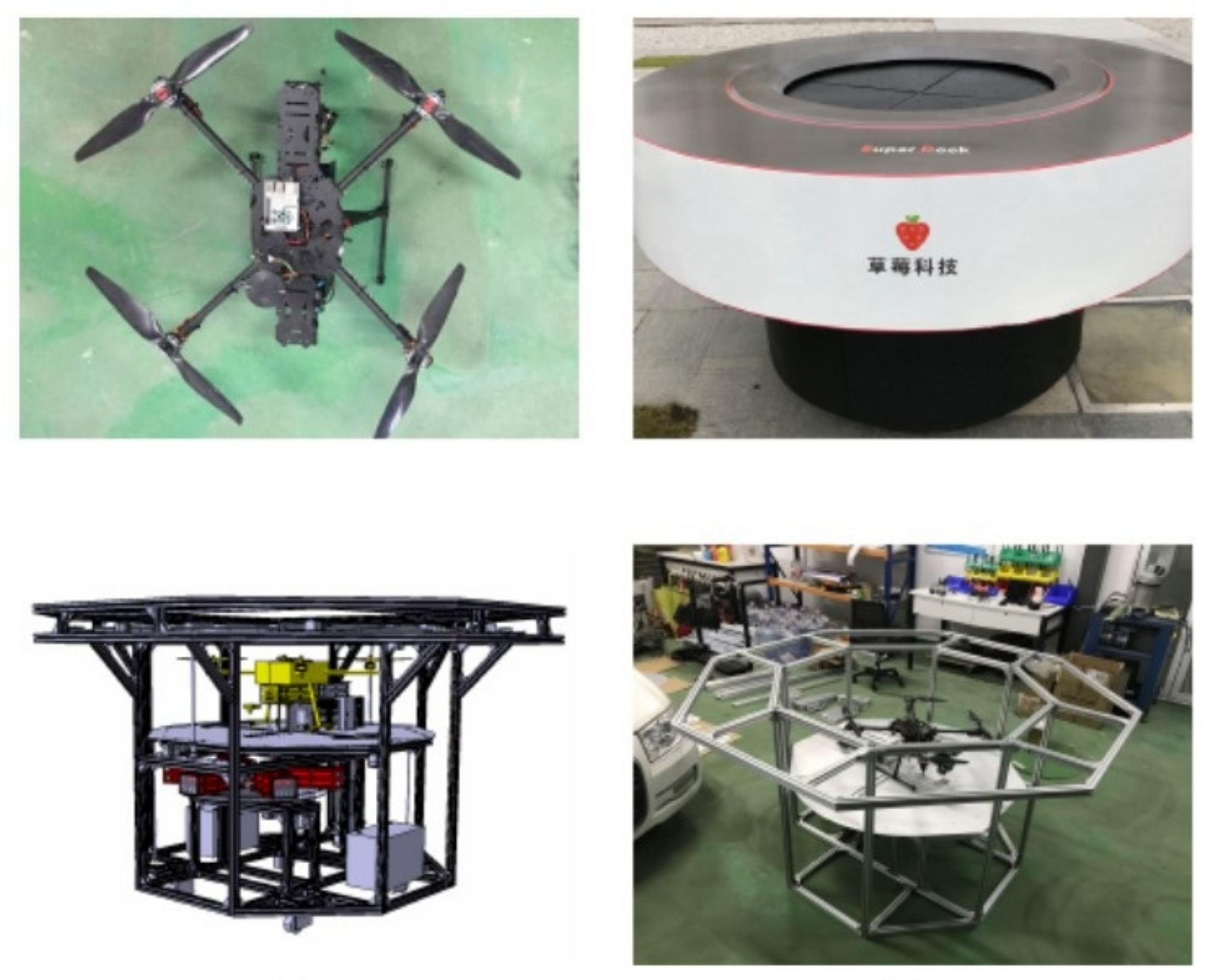
3. Fixed Docking Station
Detailed Overview
4. Mobile Docking Station
Detailed Overview
5. Commercial Docking Stations
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| USV | Unmanned Surface Vehicle |
| VLC | Visual Lights Communication |
| IMU | Inertial Measurement Unit |
| WPT | Wireless Power Transfer |
| GNSS | Global Navigation Satellite System |
| LED | Light-emitting Diode |
References
- Mahoor, M.H.; Godzdanker, R.; Dalamagkidis, K.; Valavanis, K.P. Vision-based landing of light weight unmanned helicopters on a smart landing platform. J. Intell. Robot. Syst. 2011, 61, 251–265. [Google Scholar] [CrossRef]
- Kemper, F.P.; Suzuki, K.A.; Morrison, J.R. UAV consumable replenishment: Design concepts for automated service stations. J. Intell. Robot. Syst. 2011, 61, 369–397. [Google Scholar] [CrossRef]
- Lee, D.; Ryan, T.; Kim, H.J. Autonomous landing of a VTOL UAV on a moving platform using image-based visual servoing. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 971–976. [Google Scholar] [CrossRef]
- Herissé, B.; Hamel, T.; Mahony, R.; Russotto, F.X. Landing a VTOL Unmanned Aerial Vehicle on a Moving Platform Using Optical Flow. IEEE Trans. Robot. 2012, 28, 77–89. [Google Scholar] [CrossRef]
- Sanchez-Lopez, J.L.; Pestana, J.; Saripalli, S.; Campoy, P. An approach toward visual autonomous ship board landing of a VTOL UAV. J. Intell. Robot. Syst. 2014, 74, 113–127. [Google Scholar] [CrossRef]
- Galimov, M.; Fedorenko, R.; Klimchik, A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef] [PubMed]
- Carroll, S.; Satme, J.; Alkharusi, S.; Vitzilaios, N.; Downey, A.; Rizos, D. Drone-Based Vibration Monitoring and Assessment of Structures. Appl. Sci. 2021, 11, 8560. [Google Scholar] [CrossRef]
- Wang, J.; McKiver, D.; Pandit, S.; Abdelzaher, A.F.; Washington, J.; Chen, W. Precision UAV Landing Control Based on Visual Detection. In Proceedings of the 2020 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), Shenzhen, China, 6–8 August 2020; pp. 205–208. [Google Scholar] [CrossRef]
- Antenucci, A.; Mazzaro, S.; Fiorilla, A.E.; Messina, L.; Massa, A.; Matta, W. A ROS Based Automatic Control Implementation for Precision Landing on Slow Moving Platforms Using a Cooperative Fleet of Rotary-Wing UAVs. In Proceedings of the 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 20–22 November 2020; pp. 139–144. [Google Scholar] [CrossRef]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.C.; Manzoni, P. Accurate Landing of Unmanned Aerial Vehicles Using Ground Pattern Recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef] [Green Version]
- Xing, B.Y.; Pan, F.; Feng, X.X.; Li, W.X.; Gao, Q. Autonomous landing of a micro aerial vehicle on a moving platform using a composite landmark. Int. J. Aerosp. Eng. 2019, 2019, 4723869. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Arsalan, M.; Koo, J.H.; Naqvi, R.A.; Truong, N.Q.; Park, K.R. LightDenseYOLO: A Fast and Accurate Marker Tracker for Autonomous UAV Landing by Visible Light Camera Sensor on Drone. Sensors 2018, 18, 1703. [Google Scholar] [CrossRef] [Green Version]
- Ghazzai, H.; Menouar, H.; Kadri, A. On the Placement of UAV Docking Stations for Future Intelligent Transportation Systems. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Kim, K.W.; Lee, Y.W.; Park, K.R. Remote Marker-Based Tracking for UAV Landing Using Visible-Light Camera Sensor. Sensors 2017, 17, 1987. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Phang, S.K.; Shan, M.; Chen, B.M. System integration of a vision-guided UAV for autonomous landing on moving platform. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 761–766. [Google Scholar] [CrossRef]
- Polvara, R.; Patacchiola, M.; Hanheide, M.; Neumann, G. Sim-to-Real Quadrotor Landing via Sequential Deep Q-Networks and Domain Randomization. Robotics 2020, 9, 8. [Google Scholar] [CrossRef] [Green Version]
- Almeshal, A.M.; Alenezi, M.R. A Vision-Based Neural Network Controller for the Autonomous Landing of a Quadrotor on Moving Targets. Robotics 2018, 7, 71. [Google Scholar] [CrossRef] [Green Version]
- Horla, D.; Giernacki, W.; Cieślak, J.; Campoy, P. Altitude Measurement-Based Optimization of the Landing Process of UAVs. Sensors 2021, 21, 1151. [Google Scholar] [CrossRef] [PubMed]
- Talha, M.; Asghar, F.; Rohan, A.; Rabah, M.; Kim, S.H. Fuzzy logic-based robust and autonomous safe landing for UAV quadcopter. Arab. J. Sci. Eng. 2019, 44, 2627–2639. [Google Scholar] [CrossRef]
- Benavidez, P.J.; Lambert, J.; Jaimes, A.; Jamshidi, M. Landing of a Quadcopter on a Mobile Base Using Fuzzy Logic. In Advance Trends in Soft Computing; Jamshidi, M., Kreinovich, V., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 429–437. [Google Scholar]
- Kong, W.; Zhang, D.; Wang, X.; Xian, Z.; Zhang, J. Autonomous landing of an UAV with a ground-based actuated infrared stereo vision system. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2963–2970. [Google Scholar] [CrossRef]
- Yang, T.; Li, G.; Li, J.; Zhang, Y.; Zhang, X.; Zhang, Z.; Li, Z. A Ground-Based Near Infrared Camera Array System for UAV Auto-Landing in GPS-Denied Environment. Sensors 2016, 16, 1393. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Badakis, G.; Koutsoubelias, M.; Lalis, S. Robust Precision Landing for Autonomous Drones Combining Vision-based and Infrared Sensors. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, Y.; Niu, X.; Du, J.; Chang, L.; Tang, H.; Zhang, H. Artificial Marker and MEMS IMU-Based Pose Estimation Method to Meet Multirotor UAV Landing Requirements. Sensors 2019, 19, 5428. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, H.W.; Chen, T.L.; Tien, C.H. Motion Estimation by Hybrid Optical Flow Technology for UAV Landing in an Unvisited Area. Sensors 2019, 19, 1380. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Jung, Y.; Lee, D.; Shim, D.H. Landing control on a mobile platform for multi-copters using an omnidirectional image sensor. J. Intell. Robot. Syst. 2016, 84, 529–541. [Google Scholar] [CrossRef]
- Cuong, N.; Quy, D.; Sang, T.; Nghia, N.; Sy, N.T. Indoor Positioning System using Radio Frequency and Ultrasound waves. In Proceedings of the FEEE Student Research Conference, Ho Chi Minh City, Vietnam; January 206. Volume 3. Available online: https//www.researchgate.net/publication/291975331_Indoor_Positioning_System_using_Radio_Frequency_and_Ultrasound_waves (accessed on 25 November 2021).
- Godzdanker, R.; Rutherford, M.J.; Valavanis, K.P. ISLANDS: A Self-Leveling landing platform for autonomous miniature UAVs. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Budapest, Hungary, 3–7 July 2011; pp. 170–175. [Google Scholar] [CrossRef]
- Cocchioni, F.; Mancini, A.; Longhi, S. Autonomous navigation, landing and recharge of a quadrotor using artificial vision. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 418–429. [Google Scholar] [CrossRef]
- Ramon Soria, P.; Arrue, B.; Ollero, A. A 3D-Printable Docking System for Aerial Robots: Controlling Aerial Robotic Manipulators in Outdoor Industrial Applications. IEEE Robot. Autom. Mag. 2019, 26, 44–53. [Google Scholar] [CrossRef]
- Malyuta, D.; Brommer, C.; Hentzen, D.; Stastny, T.; Siegwart, R.; Brockers, R. Long-duration fully autonomous operation of rotorcraft unmanned aerial systems for remote-sensing data acquisition. J. Field Robot. 2020, 37, 137–157. [Google Scholar] [CrossRef] [Green Version]
- Al-Obaidi, M.R.; Wan Hasan, W.Z.; Mustafa, M.A.; Azis, N. Charging Platform of Chess-Pad Configuration for Unmanned Aerial Vehicle (UAV). Appl. Sci. 2020, 10, 8365. [Google Scholar] [CrossRef]
- Costea, I.M.; Pleşca, V. Automatic battery charging system for electric powered drones. In Proceedings of the 2018 IEEE 24th International Symposium for Design and Technology in Electronic Packaging, Iasi, Romania, 25–28 October 2018; pp. 377–381. [Google Scholar] [CrossRef]
- Junaid, A.B.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Shirokova, E.I.; Azarov, A.A.; Wilson, N.G.; Shirokov, I.B. Precision Positioning of Unmanned Aerial Vehicle at Automatic Landing. In Proceedings of the 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Saint Petersburg/Moscow, Russia, 28–31 January 2019; pp. 1065–1069. [Google Scholar] [CrossRef]
- Fetisov, V. Aerial Robots and Infrastructure of Their Working Environment. In Proceedings of the 15th International Conference on Electromechanics and Robotics “Zavalishin’s Readings”, Ufa, Russia, 15–18 April 2021; Springer: Singapore, 2021; pp. 3–23. [Google Scholar]
- Aboumrad, A.; Haun, J.; McGinnis, A.; Wu, N. An Automatic Platform for Landing and Charging of UAVs to Extend UAV Operations. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 343–347. [Google Scholar] [CrossRef]
- Mersha, A.Y.; Reiling, M.; Meijering, R. Towards Long-term Autonomy for UAS. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 517–522. [Google Scholar] [CrossRef]
- Liu, Z.N.; Liu, X.Q.; Yang, L.J.; Leo, D.; Zhao, H. An Autonomous Dock and Battery Swapping System for Multirotor UAV. Unpubl. 2018, Volume 10. Available online: https://www.Researchgate.Net/publication/325077351 (accessed on 25 November 2021).
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar] [CrossRef]
- Michini, B.; Toksoz, T.; Redding, J.; Michini, M.; How, J.; Vavrina, M.; Vian, J. Automated battery swap and recharge to enable persistent UAV missions. In Proceedings of the Infotech@Aerospace, St. Louis, MO, USA, 29–31 March 2011; p. 1405. [Google Scholar]
- Fujii, K.; Higuchi, K.; Rekimoto, J. Endless Flyer: A Continuous Flying Drone with Automatic Battery Replacement. In Proceedings of the 2013 IEEE 10th International Conference on Ubiquitous Intelligence and Computing and 2013 IEEE 10th International Conference on Autonomic and Trusted Computing, Vietri sul Mare, Italy, 18–21 December 2013; pp. 216–223. [Google Scholar] [CrossRef]
- Dong, X.; Ren, Y.; Meng, J.; Lu, S.; Wu, T.; Sun, Q. Design and Implementation of Multi-rotor UAV Power Relay Platform. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 1142–1146. [Google Scholar] [CrossRef]
- Lebedev, I.; Ianin, A.; Usina, E.; Shulyak, V. Construction of Land Base Station for UAV Maintenance Automation. In Proceedings of the 15th International Conference on Electromechanics and Robotics “Zavalishin’s Readings”; Ronzhin, A., Shishlakov, V., Eds.; Springer: Singapore, 2021; pp. 499–511. [Google Scholar]
- Nelson, B.; Preez, J.D.; van Niekerk, T.; Phillips, R.; Stopforth, R. Autonomous Landing of a Multirotor Aircraft on a Docking Station. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zang, Z.; Ma, J.; Li, C.; Wang, H.; Jing, R.; Shi, Y. A design of Automatic UAV Dock Platform System. J. Phys. Conf. Ser. 2020, 1650, 022068. [Google Scholar] [CrossRef]
- Lu, W.C.; Wang, W.S. Design of an automatic docking system for quadcopters. In Proceedings of the 2016 Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Tokyo, Japan, 20–22 July 2016; pp. 199–203. [Google Scholar] [CrossRef]
- Lieret, M.; Wurmer, F.; Hofmann, C.; Franke, J. An overhead docking and charging station for autonomous unmanned aircraft. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1358–1363. [Google Scholar] [CrossRef]
- Paris, A.; Lopez, B.T.; How, J.P. Dynamic Landing of an Autonomous Quadrotor on a Moving Platform in Turbulent Wind Conditions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9577–9583. [Google Scholar] [CrossRef]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Vision-Based Autonomous Landing of a Quadrotor on the Perturbed Deck of an Unmanned Surface Vehicle. Drones 2018, 2, 15. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Zhang, C.; Baek, S.; Rawashdeh, S.; Mohammadi, A. Autonomous Landing of a UAV on a Moving Platform Using Model Predictive Control. Drones 2018, 2, 34. [Google Scholar] [CrossRef] [Green Version]
- Salagame, A.R.; Govindraj, S.; Omkar, S. Precision Landing of a UAV on a Moving Platform for Outdoor Applications. Available online: https://www.researchgate.net/publication/351034961_Precision_Landing_of_a_UAV_on_a_Moving_Platform_for_Outdoor_Applications (accessed on 25 November 2021).
- Falanga, D.; Zanchettin, A.; Simovic, A.; Delmerico, J.; Scaramuzza, D. Vision-based autonomous quadrotor landing on a moving platform. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 200–207. [Google Scholar] [CrossRef] [Green Version]
- Lippiello, V.; Mebarki, R.; Ruggiero, F. Visual coordinated landing of a UAV on a mobile robot manipulator. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linköping, Sweden, 21–26 October 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Yang, T.; Ren, Q.; Zhang, F.; Xie, B.; Ren, H.; Li, J.; Zhang, Y. Hybrid Camera Array-Based UAV Auto-Landing on Moving UGV in GPS-Denied Environment. Remote Sens. 2018, 10, 1829. [Google Scholar] [CrossRef] [Green Version]
- Lange, S.; Sünderhauf, N.; Protzel, P. Autonomous landing for a multirotor UAV using vision. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2008), Venice, Italy, 3–6 November 2008; pp. 482–491. [Google Scholar]
- Xie, J.; Peng, X.; Wang, H.; Niu, W.; Zheng, X. UAV Autonomous Tracking and Landing Based on Deep Reinforcement Learning Strategy. Sensors 2020, 20, 5630. [Google Scholar] [CrossRef]
- Olivares-Mendez, M.A.; Kannan, S.; Voos, H. Vision based fuzzy control autonomous landing with UAVs: From V-REP to real experiments. In Proceedings of the 2015 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 14–21. [Google Scholar] [CrossRef]
- Vlantis, P.; Marantos, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Quadrotor landing on an inclined platform of a moving ground vehicle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2202–2207. [Google Scholar] [CrossRef]
- Ren, X.; Yang, B.; Ye, C. UAV Autonomous Landing on a Moving Platform. Available online: https://web.stanford.edu/class/aa228/reports/2018/final24.pdf (accessed on 25 November 2021).
- Alijani, M.; Osman, A. Autonomous Landing of UAV on Moving Platform: A Mathematical Approach. In Proceedings of the 2020 International Conference on Control, Automation and Diagnosis (ICCAD), Paris, France, 7–9 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Rucco, A.; Sujit, P.; Aguiar, A.P.; Sousa, J. Optimal UAV rendezvous on a UGV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 5–8 August 2016; p. 0895. [Google Scholar]
- Muskardin, T.; Balmer, G.; Wlach, S.; Kondak, K.; Laiacker, M.; Ollero, A. Landing of a fixed-wing UAV on a mobile ground vehicle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1237–1242. [Google Scholar] [CrossRef]
- Castillo, C.; Pyattaev, A.; Villa, J.; Masek, P.; Moltchanov, D.; Ometov, A. Autonomous UAV Landing on a Moving Vessel: Localization Challenges and Implementation Framework. In Internet of Things, Smart Spaces, and Next Generation Networks and Systems; Galinina, O., Andreev, S., Balandin, S., Koucheryavy, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 342–354. [Google Scholar]
- Niu, G.; Yang, Q.; Gao, Y.; Pun, M.O. Vision-based Autonomous Landing for Unmanned Aerial and Mobile Ground Vehicles Cooperative Systems. IEEE Robot. Autom. Lett. 2021, 1. [Google Scholar] [CrossRef]
- Nogar, S.M. Autonomous Landing of a UAV on a Moving Ground Vehicle in a GPS Denied Environment. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 77–83. [Google Scholar] [CrossRef]
- Narváez, E.; Ravankar, A.A.; Ravankar, A.; Emaru, T.; Kobayashi, Y. Autonomous VTOL-UAV Docking System for Heterogeneous Multirobot Team. IEEE Trans. Instrum. Meas. 2021, 70, 1–18. [Google Scholar] [CrossRef]
- Baca, T.; Stepan, P.; Spurny, V.; Hert, D.; Penicka, R.; Saska, M.; Thomas, J.; Loianno, G.; Kumar, V. Autonomous landing on a moving vehicle with an unmanned aerial vehicle. J. Field Robot. 2019, 36, 874–891. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, H.; Liu, Y.; Du, J.; Pun, M.O. Unmanned aerial vehicle (UAV)-assisted unmanned ground vehicle (UGV) systems design, implementation and optimization. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 2797–2801. [Google Scholar] [CrossRef]
- Narváez, E.; Ravankar, A.A.; Ravankar, A.; Kobayashi, Y.; Emaru, T. Vision based autonomous docking of VTOL UAV using a mobile robot manipulator. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 157–163. [Google Scholar] [CrossRef]
- Wu, N.; Chacon, C.; Hakl, Z.; Petty, K.; Smith, D. Design and Implementation of an Unmanned Aerial and Ground Vehicle Recharging System. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 163–168. [Google Scholar] [CrossRef]
- Barrett, E.; Reiling, M.; Mirhassani, S.; Meijering, R.; Jager, J.; Mimmo, N.; Callegati, F.; Marconi, L.; Carloni, R.; Stramigioli, S. Autonomous Battery Exchange of UAVs with a Mobile Ground Base. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 699–705. [Google Scholar] [CrossRef] [Green Version]
- Rohan, A.; Rabah, M.; Asghar, F.; Talha, M.; Kim, S.H. Advanced drone battery charging system. J. Electr. Eng. Technol. 2019, 14, 1395–1405. [Google Scholar] [CrossRef]
- Palafox, P.R.; Garzón, M.; Valente, J.; Roldán, J.J.; Barrientos, A. Robust Visual-Aided Autonomous Takeoff, Tracking, and Landing of a Small UAV on a Moving Landing Platform for Life-Long Operation. Appl. Sci. 2019, 9, 2661. [Google Scholar] [CrossRef] [Green Version]
- Miyazaki, R.; Jiang, R.; Paul, H.; Ono, K.; Shimonomura, K. Airborne Docking for Multi-Rotor Aerial Manipulations. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4708–4714. [Google Scholar] [CrossRef]
- Wilson, D.B.; Göktogan, A.; Sukkarieh, S. Guidance and Navigation for UAV Airborne Docking. In Robotics: Science and Systems; The University of Sydney: Sydney, NSW, Australia, 2015; Volume 3. [Google Scholar]
- Jain, K.P.; Park, M.; Mueller, M.W. Docking two multirotors in midair using relative vision measurements. arXiv 2020, arXiv:2011.05565. [Google Scholar]
- Caruso, B.; Fatakdawala, M.; Patil, A.; Chen, G.; Wilde, M. Demonstration of In-Flight Docking Between Quadcopters and Fixed-Wing UAV. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Jain, K.P.; Mueller, M.W. Flying batteries: In-flight battery switching to increase multirotor flight time. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3510–3516. [Google Scholar] [CrossRef]
- Aissi, M.; Moumen, Y.; Berrich, J.; Bouchentouf, T.; Bourhaleb, M.; Rahmoun, M. Autonomous solar USV with an automated launch and recovery system for UAV: State of the art and Design. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, Z. A Novel Cooperative Platform Design for Coupled USV–UAV Systems. IEEE Trans. Ind. Inf. 2019, 15, 4913–4922. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Guo, J.; Liu, C.; Xiong, H.; Chai, L.; He, D. Precision Landing Test and Simulation of the Agricultural UAV on Apron. Sensors 2020, 20, 3369. [Google Scholar] [CrossRef] [PubMed]
- Alarcón, F.; García, M.; Maza, I.; Viguria, A.; Ollero, A. A Precise and GNSS-Free Landing System on Moving Platforms for Rotary-Wing UAVs. Sensors 2019, 19, 886. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, P.; Xu, S.; Zhang, W.; Dong, W. A Cooperative Aerial Inspection System with Continuable Charging Strategy. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 770–777. [Google Scholar] [CrossRef]
- Tang, H.; Zhang, D.; Gan, Z. Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors 2020, 20, 4411. [Google Scholar] [CrossRef]
- Conyers, S.A.; Vitzilaios, N.I.; Rutherford, M.J.; Valavanis, K.P. A mobile self-leveling landing platform for VTOL UAVs. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 815–822. [Google Scholar] [CrossRef]
- Petrovic, T.; Haus, T.; Arbanas, B.; Orsag, M.; Bogdan, S. Can UAV and UGV be best buddies? Towards heterogeneous aerial-ground cooperative robot system for complex aerial manipulation tasks. In Proceedings of the 2015 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015; Volume 1, pp. 238–245. [Google Scholar]
- Airobotics. Airobotics Solution. Available online: https://www.airoboticsdrones.com (accessed on 2 January 2021).
- Security, N. Available online: https://www.nightingalesecurity.com/specs-faqs/ (accessed on 2 January 2021).
- Percepto. Percepto Base. Available online: https://percepto.co/air-mobile/ (accessed on 2 January 2021).
- Hextronics. Hextronics Global Drone Station. Available online: https://www.hextronics.tech/faqs (accessed on 2 January 2021).
- Skycharge. SKYPORT DP5 Drone Box Hangar. Available online: https://www.skycharge.de/drone-box-hangar (accessed on 2 January 2021).
- HIVE. Autonomous Drone Port. Available online: https://hive.aero (accessed on 2 January 2021).
- Dronehub. Autonomous Drones-in-a-Box. Available online: https://dronehub.ai (accessed on 2 January 2021).
- EasyAerial. Smart Aerial Monitoring Systems (SAMS). Available online: https://www.easyaerial.com/# (accessed on 2 January 2021).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Brand Name | Setup | Notes |
|---|---|---|
| Airobotics [88] | drone + docking station | Fully automated drone-in-a-box solution |
| Nightingale security [89] | drone + docking station + AI software | Autonomous threat response (patrol, threat response, manual, AI intrusion detection) |
| Percepto [90] | drone + docking station | Autonomous drone solution. 4K Camera |
| Hextronics [91] | battery replacement station | DJI Mavic 2 Zoom/Pro/Enterprise Zoom/Dual/Advanced |
| Skycharge Skyport [92] | docking station | DJI Mavic and Parrot ANAFI Support |
| Hive [93] | docking station | Modular in construction to fit various drones |
| Dronehub [94] | drone + docking station + AI software | Autonomous docking station with storage system. Uses AI software for inspection |
| Easy Aerial [95] | drone + docking station | Military-grade autonomous drone in a box solution |
| Brand Name | Charging Type | Battery Slots | Swap Time | Payload Exchange | Custom UAV |
|---|---|---|---|---|---|
| Airobotics | swap | / | / | + | + |
| Nightingale security | contact charging | - | - | - | + |
| Percepto | charging | - | - | - | + |
| Hextronics | swap | 6 | 2 min | ||
| Skycharge Skyport | contact charging | - | - | - | - |
| HIVE | swap | 6 | 230 s | - | - |
| Dronehub | swap | / | 2 min | - | + |
| Easy Aerial | charging | - | - | - | + |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grlj, C.G.; Krznar, N.; Pranjić, M. A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones 2022, 6, 17. https://doi.org/10.3390/drones6010017
Grlj CG, Krznar N, Pranjić M. A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones. 2022; 6(1):17. https://doi.org/10.3390/drones6010017
Chicago/Turabian StyleGrlj, Carlo Giorgio, Nino Krznar, and Marko Pranjić. 2022. "A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms" Drones 6, no. 1: 17. https://doi.org/10.3390/drones6010017
APA StyleGrlj, C. G., Krznar, N., & Pranjić, M. (2022). A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones, 6(1), 17. https://doi.org/10.3390/drones6010017