
Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats

 , , ,
, , ,
Abstract
:1. Introduction
2. Study Related to Regulations
- The users or operators of a registered UAV must carry the proof of license while operating the UAV.
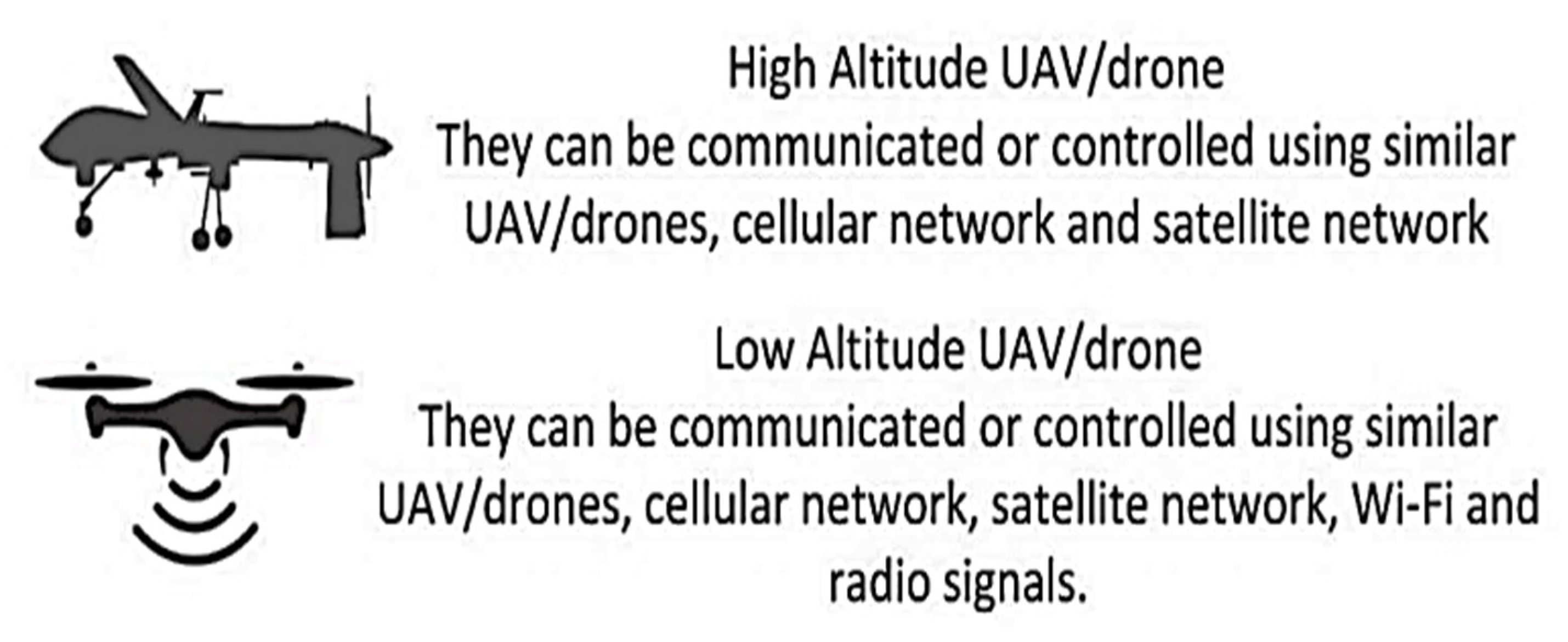
- The maximum height at which the UAV can maneuver is 400 feet only.
- UAVs must be kept away from the airfields and, in case of necessity, one may acquire the written permission from relevant boards or authorities.
- In the case of a UAV crash, legal action can be taken against any harmful actions or the damage that occurred from UAV failure.
- UAVs with computer vision or camera surveillance are not allowed to maneuver within 50 m of people or any crowd.
- UAVs will be summoned if they are not flown within the operator’s line of sight.
- UAVs will be summoned if they are flown at night without proper lighting.
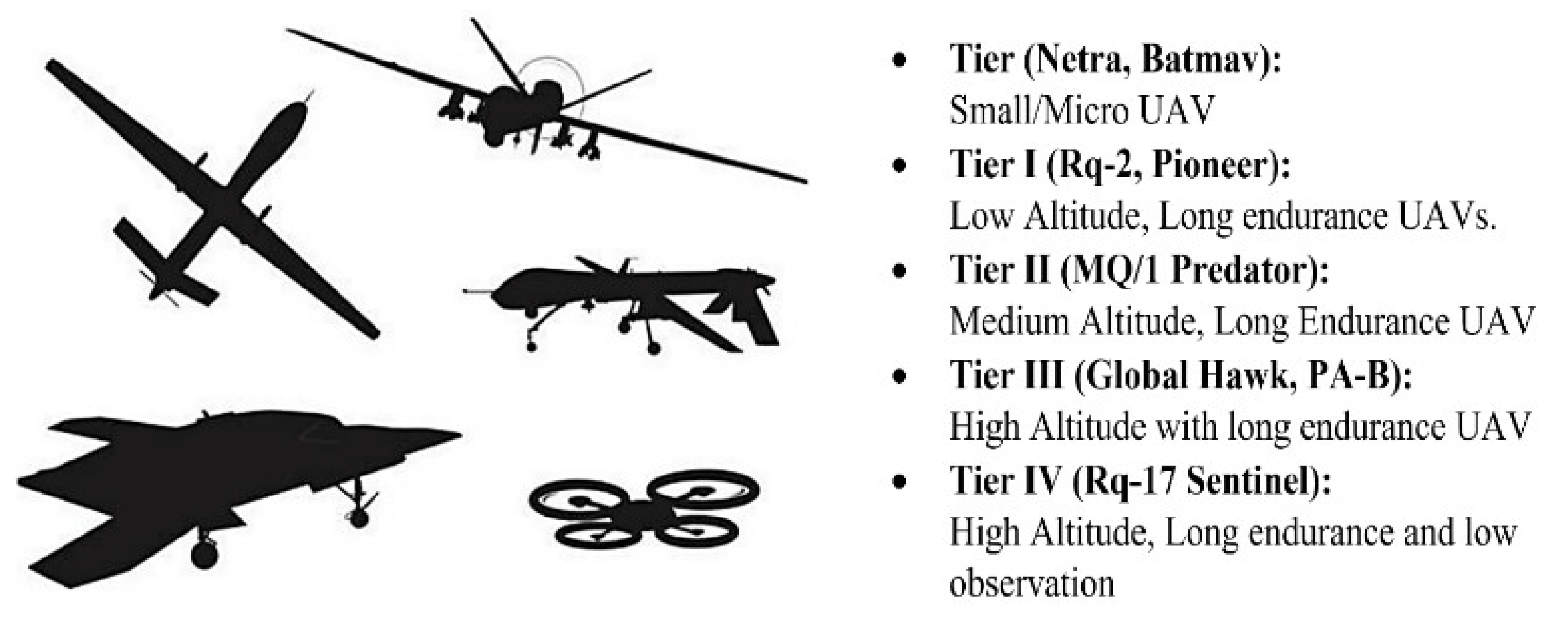
3. Classification of UAVs
3.1. Classification of Drones
- Rotary-wing drones;
- Fixed-wing drones;
- Hybrid-wing drones;
- Flapping-wing drones.
3.2. Classification of UAVs Based on Ground Command and Control
- Fully autonomous controlled UAVs: These are the UAVs that can perform different tasks without any intervention from human beings and are fully automated.
- Remotely operated UAVs: These UAVs are designed to execute the task as directed by a human being. Thus, they have a human as their main operator.
- Remotely pilot-controlled UAVs: Drones where all tasks and maneuvers are performed by the human-based remote control from the GCR.
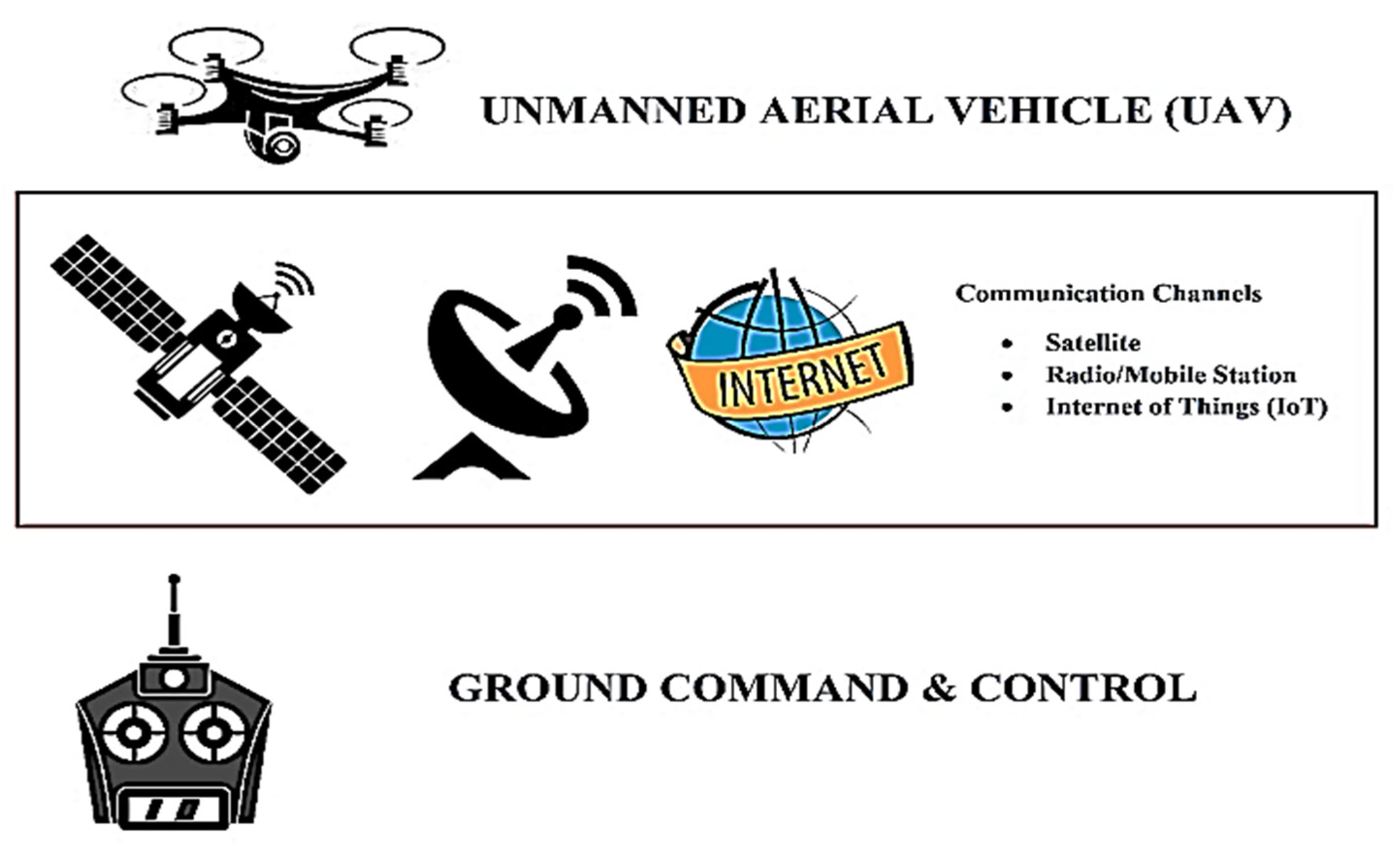
4. Communication Methods and Architecture
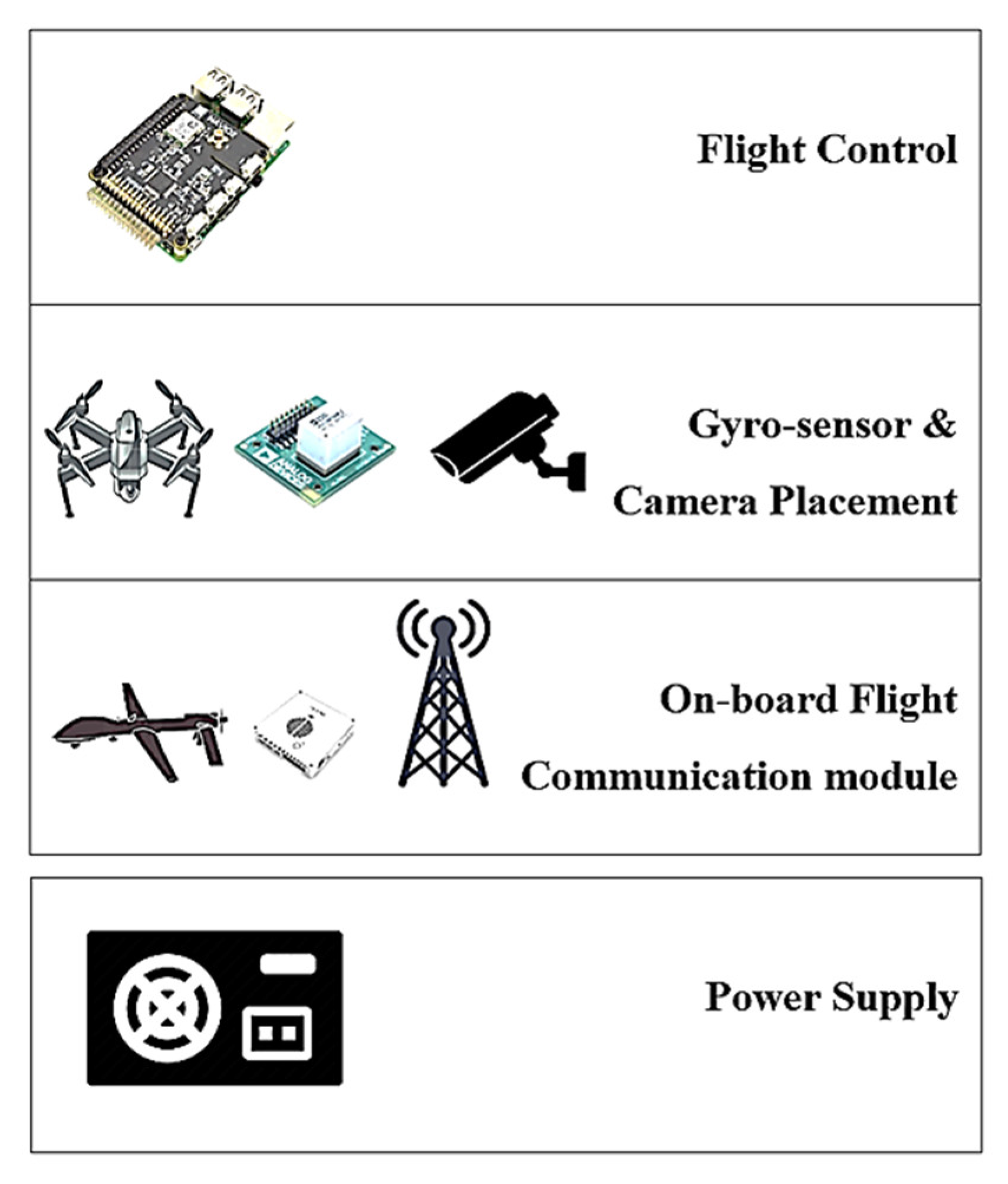
- Drone airframe;
- Onboard controller;
- Payload capability;
- Communication system;
- Efficient batteries.
Communication Methods
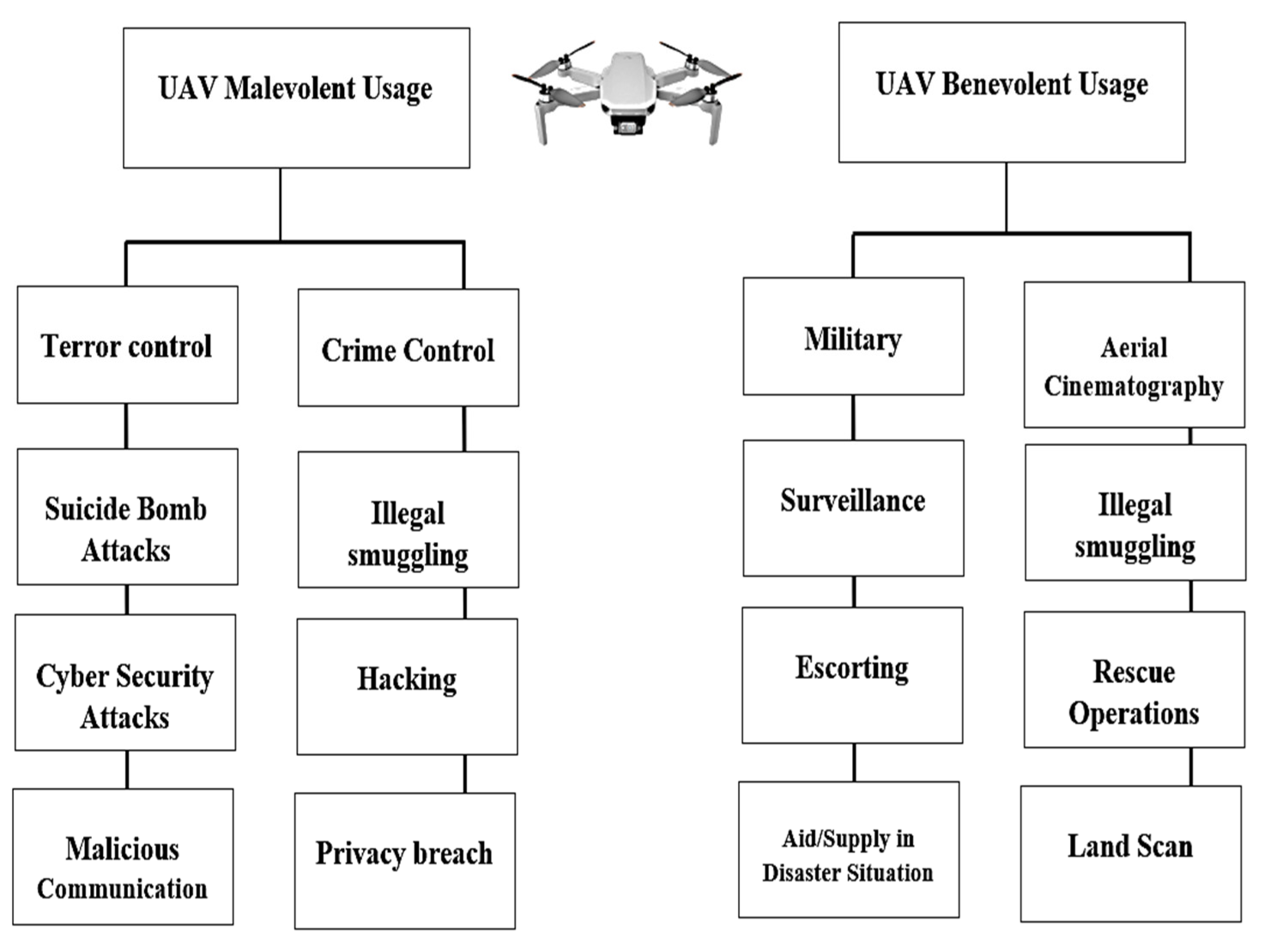
5. Utilization of UAVs in Different Domains
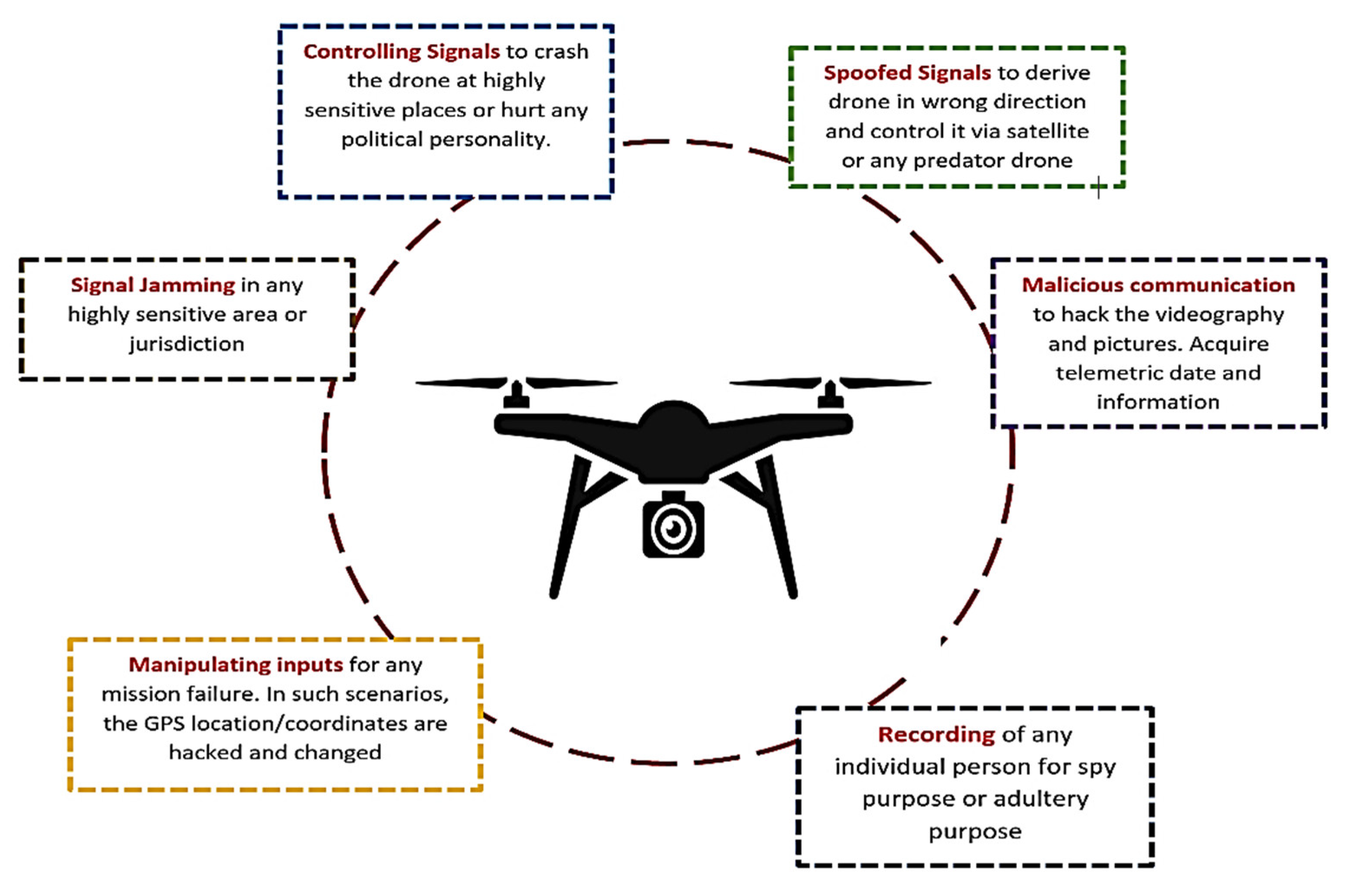
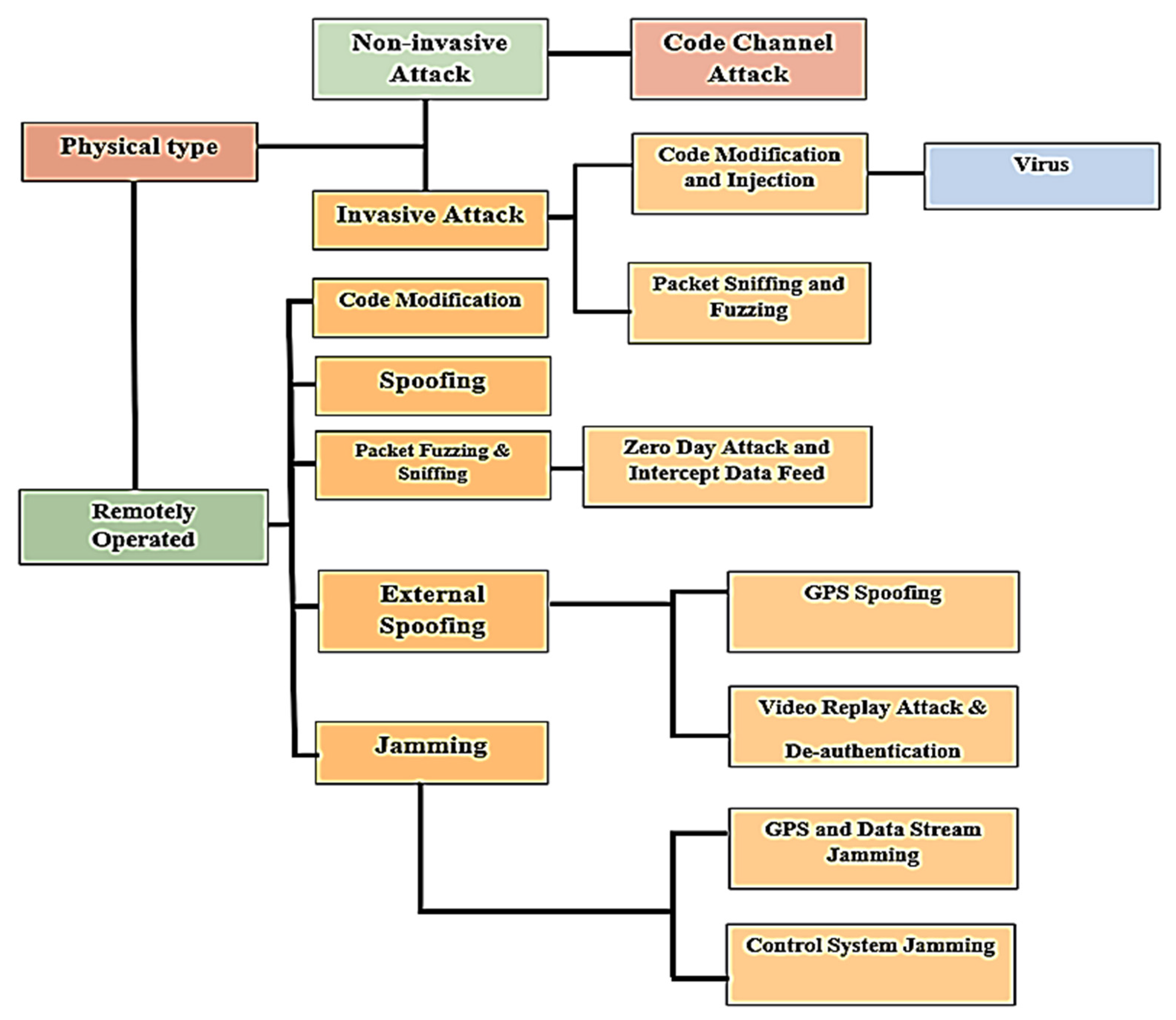
6. Security Threats Related to UAVs
- It is a high probability that a drone can be hacked or may deviate from its path due to heavy wind disturbance. Thus, there should be a reset option available which may turn the drone to a hovering condition only and help to gain the control back.
- There are certain areas where drones may face signal jammers and, later, can be controlled for a cyberattack. Thus, drones must have some sort of filter that may detect if there is any signal jammer nearby.
7. Current Vulnerability Issues of UAVs
8. Current State-of-the-Art Solutions
- Rule-based IDS;
- Signature-based IDS;
- Anomaly-based IDS.
9. Open Research Areas and Recommendations
- There is a need to address the area of high-speed mobility, as there are huge chances to hack the communication links through the ground control room or with neighboring UAVs.
- In some of the integrated solutions, i.e., the space-air-ground network, one may see a frequent issue of synchronization, and thus, it is desirable to re-design some cooperation incentives for using cross-layered protocols with linked reliability. In this way, there will be less chances of any security attacks.
- One more aspect is to recommend a lightweight mechanism for UAVs to prevent attacks, such as eavesdropping, a man-in-the-middle attack [112,113], and so on. There are a number of artificial intelligence solutions which are recommended in [28] for addressing the security in cellular network-based controlled UAVs for delivering packages.
- Integrating UAVs with the IoT can result in endurance and reliability, but at the same time, it consumes the maximum battery capacity which is generally small; thus, this may lead UAVs toward possible collisions and can be a high-risk threat.
- Lastly, proposing a big data deep reinforcement learning approach to enable the dynamic arrangement of networking, caching, and computing resources for improving the performance of UAVs with secure operations in smart cities.
10. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bombe, M.K. Unmanned Aerial Vehicle (UAV) Market Worth $21.8 billion by 2027- Pre and Post COVID-19 Market Analysis Report by Meticulous Research. 11 June 2020. Available online: https://www.meticulousresearch.com/download-sample-report/cp_id=5086 (accessed on 18 August 2022).
- Kumar, R.; Kumar, P.; Tripathi, R.; Gupta, G.P.; Gadekallu, T.R.; Srivastava, G. SP2F: A secured privacy-preserving framework for smart agricultural Unmanned Aerial Vehicles. Comput. Networks 2021, 187, 107819. [Google Scholar] [CrossRef]
- Israr, A.; Abro, G.E.M.; Sadiq Ali Khan, M.; Farhan, M.; Zulkifli, B.M.; ul Azrin, S. Internet of things (IoT)-Enabled unmanned aerial vehicles for the inspection of construction sites: A vision and future directions. Math. Problems Eng. 2021. [Google Scholar] [CrossRef]
- Chen, R.; Yang, B.; Zhang, W. Distributed and Collaborative Localization for Swarming UAVs. IEEE Internet Things J. 2020, 8, 5062–5074. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutorials 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on drone technology and their applications: A comprehensive review. AIP Conf. Proc. 2018, 2030, 020308. [Google Scholar] [CrossRef]
- Hartmann, K.S.C. The vulnerability of UAVs to cyber, in Cyber Conflict (CyCon). In Proceedings of the 2013 5th International Conference, Tallinn, Estonia, 4–7 June 2013. [Google Scholar]
- Bowden, M. How the Predator Drone Changed the Character of War, Smithsonian Magazine. November 2013. Available online: https://www.smithsonianmag.com/history/how-the-predatordrone-changed-the-character-of-war-3794671/ (accessed on 18 August 2022).
- Ekramul, D. First Successful Air-Raid in History. 22 August 2019. Available online: https://www.daily-bangladesh.com/english/First-successful-Air-raid-in-history/27424 (accessed on 18 August 2022).
- O’Donnell, S. Consortiq. Available online: https://consortiq.com/short-history-unmanned-aerialvehicles-uavs/ (accessed on 18 August 2022).
- Berg, T.R. Air Space Mag. 10 January 2020. Available online: https://www.airspacemag.com/daily-planet/first-map-compiled-aerial-photographs-180973929/ (accessed on 18 August 2022).
- Abdullah, Q.A. Introduction to the Unmanned Aircraft Systems. Available online: https://www.eeducation.psu.edu/geog892/node/643 (accessed on 18 August 2022).
- Miah, A. Drones: The Brilliant, the Bad and the Beautiful; Emerald Group Publishing: Bently, UK, 2020. [Google Scholar] [CrossRef]
- Ali, B.S.; Saji, S.; Su, M.T. An assessment of frameworks for heterogeneous aircraft operations in low-altitude airspace. Int. J. Crit. Infrastruct. Prot. 2022, 37, 100528. [Google Scholar] [CrossRef]
- Wright, S. Ethical and safety implications of the growing use of civilian drone. UK Parliam. Website Sci. Technol. Commit. 2019. [Google Scholar]
- Coach, U. Master List of Drone Laws (Organized by State & Country). Available online: https://uavcoach.com/drone-laws/ (accessed on 18 August 2022).
- Aljehani, M.; Inoue, M.; Watanbe, A.; Yokemura, T.; Ogyu, F.; Iida, H. UAV communication system integrated into network traversal with mobility. SN Appl. Sci. 2020, 2, 2749. [Google Scholar] [CrossRef]
- de Croon, G.C.H.E.; Groen, M.A.; De Wagter, C.; Remes, B.; Ruijsink, R.; van Oudheusden, B.W. Design, aerodynamics and autonomy of the DelFly. Bioinspir. Biomim. 2012, 7, 025003. [Google Scholar] [CrossRef]
- Cheaw, B.H.; Ho, H.W.; Abu Bakar, E. Wing Design, Fabrication, and Analysis for an X-Wing Flapping-Wing Micro Air Vehicle. Drones 2019, 3, 65. [Google Scholar] [CrossRef]
- Teoh, Z.E.; Fuller, S.B.; Chirarattananon, P.; Prez-Arancibia, N.O.; Greenberg, J.D.; Wood, R.J. A hovering flapping-wing microrobot with altitude control and passive upright stability. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 3209–3216. [Google Scholar] [CrossRef]
- Professionals, Drones and Remotely Piloted Aircraft (UAS/RPAS)-Frequencies and Radio Licenses, Traficom. 17 July 2021. Available online: https://www.traficom.fi/en/transport/aviation/drones-and-remotely-piloted-aircraft-uasrpasfrequencies-and-radio-licences (accessed on 18 August 2022).
- Carnahan, ISO/TC 20/SC 16 Unmanned Aircraft Systems. 2014. Available online: https://www.iso.org/committee/5336224.html (accessed on 18 August 2022).
- Irizarry, M.J.; Gheisari, B. Walker, Usability Assessment of Drone Technology as Safety Inspection Tools. Electron. J. Inf. Technol. Constr. 2012, 17, 194–212. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tut. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Lowbridge, C. Are Drones Dangerous or Harmless Fun? BBC News. 5 October 2015. Available online: https://www.bbc.com/news/uk-england-34269585 (accessed on 18 August 2022).
- Federal Aviation Authorities, Recreational Flyers & Modeler Community-Based Organizations. 18 February 2020. Available online: https://www.faa.gov/uas/recreational_fliers/ (accessed on 18 August 2022).
- Pilot, What’s the Difference Between Drones, UAV, and UAS? Definitions and Terms. Pilot Institute. 22 March 2020. Available online: https://pilotinstitute.com/drones-vs-uav-vs-uas/ (accessed on 18 August 2022).
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutorials 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Nagpal, K. Unmanned Aerial Vehicles (UAV) Market, Q Tech Synergy. 24 December 2016. Available online: https://defproac.com/?p=2041 (accessed on 18 August 2022).
- Pastor, E.; Lopez, J.; Royo, P. A Hardware/Software Architecture for UAV Payload and Mission Control. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–18 October 2006; pp. 1–8. [Google Scholar] [CrossRef]
- VanZwol, J. Design Essentials: For UAVs and Drones, Batteries are Included, Machine Design. 4 April 2017. Available online: https://www.machinedesign.com/mechanical-motionsystems/article/21835356/design-essentials-for-uavs-and-drones-batteries-are-included (accessed on 18 August 2022).
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.; Jayakody, D.N.K.; Wang, H.-C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Ullah, H.; Nair, N.G.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G Communication: An Overview of Vehicle-to-Everything, Drones, and Healthcare Use-Cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Luo, C.; Miao, W.; Ullah, H.; McClean, S.; Parr, G.; Min, G. Unmanned aerial vehicles for disaster management. In Geological Disaster Monitoring Based on Sensor Networks; Springer: Singapore, 2019; pp. 83–107. [Google Scholar]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar] [CrossRef]
- IvyPanda, Unmanned Aerial Vehicles Essay. 13 January 2020. Available online: https://ivypanda.com/essays/unmanned-aerial-vehicles-essay/ (accessed on 20 December 2020).
- Valavanis, K.P.; Vachtsevanos, G.J. UAV Applications: Introduction. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2639–2641. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Cook, K.L.B. The Silent Force Multiplier: The History and Role of UAVs in Warfare. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Siddiqi, M.A.; Khoso, A.M. Aziz, Analysis on Security Methods of Wireless Sensor Network (WSN). In Proceedings of the SJCMS 2018, Sukkur, Pakistan, 10 December 2018. [Google Scholar]
- Cavoukian, A. Privacy and Drones: Unmanned Aerial Vehicle; Information and Privacy Commissioner: Toronto, ON, Canada, 2012. [Google Scholar]
- Kafi, M.A.; Challal, Y.; Djenouri, D.; Doudou, M.; Bouabdallah, A.; Badache, N. A Study of Wireless Sensor Networks for Urban Traffic Monitoring: Applications and Architectures. Procedia Comput. Sci. 2013, 19, 617–626. [Google Scholar] [CrossRef]
- Mansfield, K.; Eveleigh, T.; Holzer, T.H.; Sarkani, S. Unmanned aerial vehicle smart device ground control station cyber security threat model. In Proceedings of the 2013 IEEE International Conference Technology Homel Security (HST), Walthan, MA, USA, 12–14 November 2013; pp. 722–728. [Google Scholar] [CrossRef]
- Smith, K.W. Drone Technology: Benefits, Risks, and Legal Considerations. Seattle J. Environ. Law (SJEL) 2015, 5, 291–302. [Google Scholar]
- Eyerman, J.; Hinkle, K.; Letterman, C.; Schanzer, D.; Pitts, W.; Ladd, K. Unmanned Aircraft and the Human Element: Public Perceptions and First Responder Concerns; Institute of Homeland Security and Solutions: Washington, DC, USA, 2013. [Google Scholar]
- Syed, N.; Berry, M. Journo-Drones: A Flight over the Legal Landscape; American Bar Association: Chicago, IL, USA, 2014. [Google Scholar]
- Rahman, M.F.B.A. Smart CCTVS for Secure Cities: Potentials and Challenges; Rajaratnam School of International Studies (RSIS): Singapore, 2017. [Google Scholar]
- Kim, A.; Wampler, B.; Goppert, J.; Hwang, I.; Aldridge, H. Cyber Attack Vulnerabilities Analysis for Unmanned Aerial Vehicles. Aerospace Res. Cent. 2012, 2438. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Soria, P.R.; Bevec, R.; Arrue, B.C.; Ude, A.; Ollero, A. Extracting Objects for Aerial Manipulation on UAVs Using Low Cost Stereo Sensors. Sensors 2016, 16, 700. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. Drones, Smartphones and Sensors to Face Natural Disasters. In Proceedings of the 4th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Paris, France, 10–15 June 2018; pp. 75–86. [Google Scholar] [CrossRef]
- Son, Y.; Shin, H.; Kim, D.; Park, Y.; Noh, J.; Choi, K. Rocking Drones with Intentional Sound Noise on Gyroscopic Sensors. In Proceedings of the 24th USENIX Security Symposium, Washington, DC, USA, 12–14 August 2015. [Google Scholar]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2019, 25, 95–101. [Google Scholar] [CrossRef]
- Strohmeier, M.; Schafer, M.; Lenders, V.; Martinovic, I. Realities and challenges of nextgen air traffic management: The case of ADS-B. IEEE Commun. Mag. 2014, 52, 111–118. [Google Scholar] [CrossRef]
- Hooper, M.; Tian, Y.; Zhou, R.; Cao, B.; Lauf, A.P.; Watkins, L.; Robinson, W.H.; Alexis, W. Securing commercial WiFi-based UAVs from common security attacks. In Proceedings of the MILCOM 2016-2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016; pp. 1213–1218. [Google Scholar] [CrossRef]
- Hartmann, K.; Giles, K. UAV exploitation: A new domain for cyber power. In Proceedings of the 2016 8th International Conference Cyber Conflict, Tallinn, Estonia, 31 May–3 June 2016; pp. 205–221. [Google Scholar] [CrossRef]
- Rivera, E.; Baykov, R.; Gu, G. A Study on Unmanned Vehicles and Cyber Security. In Proceedings of the Rivera 2014 ASO, Austin, TX, USA, 2014. [Google Scholar]
- Junejo, I.N.; Foroosh, H. GPS coordinates estimation and camera calibration from solar shadows. Comput. Vis. Image Underst. 2010, 114, 991–1003. [Google Scholar] [CrossRef]
- Wang, W.; Huang, H.; Zhang, L.; Su, C. Secure and efficient mutual authentication protocol for smart grid under blockchain. Peer-to-Peer Netw. Appl. 2020, 14, 2681–2693. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.; Wang, W.; Jin, Z.; Su, Y.; Chen, H. Research on a Covert Communication Model Realized by Using Smart Contracts in Blockchain Environment. IEEE Syst. J. 2021, 16, 2822–2833. [Google Scholar] [CrossRef]
- Currier, C.; Moltke, H. Spies in the Sky; The Intercept: New York, NY, USA, 2016. [Google Scholar]
- Yağdereli, E.; Gemci, C.; Aktaş, A.Z. A study on cyber-security of autonomous and unmanned vehicles. J. Déf. Model. Simulation: Appl. Methodol. Technol. 2015, 12, 369–381. [Google Scholar] [CrossRef]
- Lee, Y.S.; Dongseo University; Kang, Y.-J.; Lee, S.-G.; Lee, H.; Ryu, Y. An Overview of Unmanned Aerial Vehicle: Cyber Security Perspective. IT Converg. Technol. 2016, 4, 30. [Google Scholar] [CrossRef]
- Wu, L.; Cao, X.; Foroosh, H. Camera calibration and geo-location estimation from two shadow trajectories. Comput. Vis. Image Underst. 2010, 114, 915–927. [Google Scholar] [CrossRef]
- Krishna, C.G.L.; Murphy, R.R. A review on cybersecurity vulnerabilities for unmanned aerial vehicles. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 194–199. [Google Scholar] [CrossRef]
- Siddiqi, M.A.; Pak, W. Optimizing Filter-Based Feature Selection Method Flow for Intrusion Detection System. Electronics 2020, 9, 2114. [Google Scholar] [CrossRef]
- Strohmeier, M.; Lenders, V.; Martinovic, I. Intrusion Detection for Airborne Communication Using PHY-Layer Information. In Proceedings of the International Conference Detection of Intrusions and Malware, and Vulnerability Assessment; Springer: Cham, Switerland, 2015; pp. 67–77. [Google Scholar] [CrossRef]
- Gil Casals, S.; Owezarski, P.; Descargues, G. Generic and autonomous system for airborne networks cyber-threat detection. In Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), IEEE, New York, NY, USA, 5–10 October 2013; pp. 4A4-1–4A4-14. [Google Scholar] [CrossRef]
- Rani, C.; Modares, H.; Sriram, R.; Mikulski, D.; Lewis, F.L. Security of unmanned aerial vehicle systems against cyber-physical attacks. J. Déf. Model. Simul. Appl. Methodol. Technol. 2015, 13, 331–342. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV Communications via Joint Trajectory and Power Control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef]
- Shao, X.; Wang, L.; Li, J.; Liu, J. High-order ESO based output feedback dynamic surface control for quadrotors under position constraints and uncertainties. Aerosp. Sci. Technol. 2019, 89, 288–298. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Kim, E.; Kim, Y.-S.; Seol, D.-C. Effective Message Authentication Method for Performing a Swarm Flight of Drones. Emergency 2015, 3, 95–97. [Google Scholar] [CrossRef]
- Pilli, E.S.; Joshi, R.; Niyogi, R. A Generic Framework for Network Forensics. Int. J. Comput. Appl. 2010, 1, 251–408. [Google Scholar] [CrossRef]
- Beebe, N.L.; Clark, J.G. A hierarchical, objectives-based framework for the digital investigations process. Digit. Investig. 2005, 2, 147–167. [Google Scholar] [CrossRef]
- Jain, U.; Rogers, M.; Matson, E.T. Drone forensic framework: Sensor and data identification and verification. In Proceedings of the 2017 IEEE Sensors Application Symposium (SAS), Glasgow, UK, 31 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Roder, K.; Choo, N.K.R.A. Le-Khac, Unmanned Aerial Vehicle Forensic Investigation Process: Dji Phantom 3 Drone As A Case Study. arXiv Prepr. 2018, arXiv:1804.08649. [Google Scholar]
- Siddiqi, M.A.; Ghani, N. Critical Analysis on Advanced Persistent Threats. Int. J. Comput. Appl. 2016, 141, 46–50. [Google Scholar] [CrossRef]
- Siddiqi, M.A.; Yu, H.; Joung, J. 5G Ultra-Reliable Low-Latency Communication Implementation Challenges and Operational Issues with IoT Devices. Electronics 2019, 8, 981. [Google Scholar] [CrossRef]
- Khan, N.A.; Jhanjhi, N.Z.; Brohi, S.N.; Almazroi, A.A.; Almazroi, A.A. A secure communication protocol for unmanned aerial vehicles. CMC-COMPUTERS MATERIALS CONTINUA 2022, 70, 601–618. [Google Scholar] [CrossRef]
- Wild, G.; Murray, J.; Baxter, G. Exploring Civil Drone Accidents and Incidents to Help Prevent Potential Air Disasters. Aerospace 2016, 3, 22. [Google Scholar] [CrossRef]
- Goodrich, M. Drone Catcher: “Robotic Falcon” can Capture, Retrieve Renegade Drones, Michigan Tech. 7 January 2016. Available online: https://www.mtu.edu/news/stories/2016/january/drone-catcher-robotic-falcon-can-capture-retrieve-renegade-drones.html (accessed on 18 August 2022).
- McNabb, M. Dedrone Acquires the Anti Drone Shoulder Rifle, Batelle’s Drone Defender, Drone Life. 9 October 2019. Available online: https://dronelife.com/2019/10/09/dedrone-acquires-theanti-drone-shoulder-rifle-batelles-drone-defender/ (accessed on 18 August 2022).
- Capello, E.; Dentis, M.; Mascarello, L.N.; Primatesta, S. Regulation analysis and new concept for a cloud-based UAV supervision system in urban environment. In Proceedings of the Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), IEEE, (2017), Carnfiled, UK, 25–27 November 2017; pp. 90–95. [Google Scholar] [CrossRef]
- Joglekar, R. 4 Strategies for Stopping ‘Rogue’ Drones from Flying in Illegal Airspace. ABC News. 23 December 2018. Available online: https://abcnews.go.com/Technology/strategies-stoppingrogue-drones-flying-illegal-airspace/story?id=59973853 (accessed on 18 August 2022).
- Friedberg, S. A Primer on Jamming, Spoofing, and Electronic Interruption of a Drone, Dedrone. 19 April 2018. Available online: https://blog.dedrone.com/en/primer-jamming-spoofing-andelectronic-interruption-of-a-drone (accessed on 18 August 2022).
- Cyber, T.E.O. How To Crack WPA/WPA2 Wi-Fi Passwords Using Aircrack-ng, Medium. 5 November 2019. Available online: https://medium.com/@TheEyeOfCyberBuckeyeSecurity/howto-crack-wpa-wpa2-wi-fi-passwords-using-aircrack-ng-8cb7161abcf9 (accessed on 18 August 2022).
- Yaacoub, J.-P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Bonilla, C.A.T.; Parra, O.J.S.; Forero, J.H.D. Common Security Attacks on Drones. Int. J. Appl. Eng. Res. 2018, 13, 4982–4988. [Google Scholar]
- Gaspar, J.; Ferreira, R.; Sebastião, P.; Souto, N. Capture of UAVs Through GPS Spoofing Using Low-Cost SDR Platforms. Wirel. Pers. Commun. 2020, 115, 2729–2754. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV Detection and Classification from RF Fingerprints Using Machine Learning Techniques. In Proceedings of the 2019 IEEE Aerospace Conference; IEEE: Piscataway, NJ, USA, 2019; pp. 1–13. [Google Scholar] [CrossRef]
- Digulescu, A.; Despina-Stoian, C.; Stănescu, D.; Popescu, F.; Enache, F.; Ioana, C.; Rădoi, E.; Rîncu, I.; Șerbănescu, A. New Approach of UAV Movement Detection and Characterization Using Advanced Signal Processing Methods Based on UWB Sensing. Sensors 2020, 20, 5904. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Unauthorized Amateur UAV Detection Based on WiFi Statistical Fingerprint Analysis. IEEE Commun. Mag. 2018, 56, 106–111. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; Gupta, T.; Kim, J.; You, U. Internet of Drones (IoD): Threats, Vulnerability, and Security Perspectives. In Proceedings of the MobiSec 2018: The 3rd International Symposium on Mobile Internet Security, Cebu, Philippines, 29 Auguest–1 September 2018. [Google Scholar]
- Noura, H.N.; Salman, O.; Chehab, A.; Couturier, R. DistLog: A distributed logging scheme for IoT forensics. Ad Hoc Networks 2019, 98, 102061. [Google Scholar] [CrossRef]
- Cohen, R.S. The Drone Zappers, Air Force Magazine. 22 March 2019. Available online: https://www.airforcemag.com/article/the-drone-zappers/ (accessed on 18 August 2022).
- Mizokami. Air Force Downs Several Drones with New ATHENA Laser Weapon System, Popular Mechanics. 8 November 2019. Available online: https://www.popularmechanics.com/military/research/a29727696/athena-laser-weapon/ (accessed on 18 August 2022).
- Federal Aviation Administration, Become a Drone Pilot, Become a Pilot. 19 May 2021. Available online: https://www.faa.gov/uas/commercial_operators/become_a_drone_pilot/ (accessed on 18 August 2022).
- Transport Canada, Where to Fly your Drone, Drone Safety. 19 February 2021. Available online: https://tc.canada.ca/en/aviation/drone-safety/where-fly-your-drone (accessed on 18 August 2022).
- Ch, R.; Srivastava, G.; Gadekallu, T.R.; Maddikunta, P.K.R.; Bhattacharya, S. Security and privacy of UAV data using blockchain technology. J. Inf. Secur. Appl. 2020, 55, 102670. [Google Scholar] [CrossRef]
- Sinha Satyajit, Securing IoT with Blockchain, Counterpoint. 11 May 2018. Available online: https://www.counterpointresearch.com/securing-iot-blockchain/ (accessed on 18 August 2022).
- Wang, W.; Xu, H.; Alazab, M.; Gadekallu, T.R.; Han, Z.; Su, C. Blockchain-Based Reliable and Efficient Certificateless Signature for IIoT Devices. IEEE Trans. Ind. Inform. 2021, 18, 7059–7067. [Google Scholar] [CrossRef]
- Zhang, L.; Zou, Y.; Wang, W.; Jin, Z.; Su, Y.; Chen, H. Resource allocation and trust computing for blockchain-enabled edge computing system. Comput. Secur. 2021, 105, 102249. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, M.; Wang, W.; Jin, Z.; Su, Y.; Chen, H. Secure and efficient data storage and sharing scheme for blockchain-based mobile-edge computing. Trans. Emerg. Telecommun. Technol. 2021, 32, e4315. [Google Scholar] [CrossRef]
- Shao, X.; Yue, X.; Liu, J. Distributed adaptive formation control for underactuated quadrotors with guaranteed performances. Nonlinear Dyn. 2021, 105, 3167–3189. [Google Scholar] [CrossRef]
- Li, M.; Guo, C.; Yu, H.; Yuan, Y. Event-triggered containment control of networked underactuated unmanned surface vehicles with finite-time convergence. Ocean Eng. 2022, 246, 110548. [Google Scholar] [CrossRef]
- Rahman, Z.; Yi, X.; Khalil, I. Blockchain based AI-enabled Industry 4.0 CPS Protection against Advanced Persistent Threat. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Yu, S.; Das, A.K.; Park, Y.; Lorenz, P. SLAP-IoD: Secure and Lightweight Authentication Protocol Using Physical Unclonable Functions for Internet of Drones in Smart City Environments. IEEE Trans. Veh. Technol. 2022. [Google Scholar] [CrossRef]
- Gaurav, B.; Kumar, D.; Vidyarthi, D.P. BARA: A blockchain-aided auction-based resource allocation in edge computing enabled industrial internet of things. Future Gener. Comput. Syst. 2022. [Google Scholar]
- Yuan, L.; Zhang, Y.; Wang, J.; Xiang, W.; Xiao, S.; Chang, L.; Tang, W. Performance analysis for covert communications under faster-than-Nyquist signaling. IEEE Commun. Lett. 2022. [Google Scholar]
- Zhang, W.; Shao, X.; Zhang, W.; Qi, J.; Li, H. Unknown input observer-based appointed-time funnel control for quadrotors. Aerosp. Sci. Technol. 2022, 126, 107351. [Google Scholar] [CrossRef]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine Learning for Wireless Connectivity and Security of Cellular-Connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Sanjab, A.; Saad, W.; Basar, T. Prospect theory for enhanced cyber-physical security of drone delivery systems: A network interdiction game. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr. No. | Bandwidth | Description |
|---|---|---|
| 1 | 2.4 KHz to 2483.500 MHz | The appropriate standard is EN 300 328, which is digital wideband data transmission equipment, and sometimes, the standard used is EN 300 440, which is general short-range devices. |
| Purpose: Mostly used for short-range surveillance or short-range maneuvering missions. | ||
| 2 | 5.47 KHz to 57250 MHz | Operational power is less or equal to 1 watt, whereas the power spectral density is less the 50mW/1 MHz frequency. The standard is EN 201 893, which is known as RLAN equipment. |
| Purpose: Long stay in sky operations, used mainly for aerial photography. | ||
| 3 | 5.725 KHz to 5875 MHz | Its operational power rating is less than 25 mW and standard is EN 300 440, which is general short-range devices. |
| Purpose: Used for short-range surveillance with fast maneuvering and manipulating tasks. | ||
| 4 | 5030 to 5091 MHz | This is the frequency used only for the International Telecommunication Union (ITU) and, therefore, cannot be used for communication with drones. |
| Purpose: Used in such operations where data sharing is important with ground control room (GCR). |
| Factors | Based on Wing Type | Based on Altitude | |||
|---|---|---|---|---|---|
| Fixed-Wing Type | Rotary-Wing Type | Hybrid-Wing Type | Low Altitude Below 400 ft | High Altitude Above 400 ft | |
| Hovering | No | Yes | Yes | Yes | Yes |
| Small Size | No | Yes | Yes | Yes | No |
| Transport goods | Yes | Low weight | Yes | Yes | No |
| Battery time (in hour) | >1 h | 1 h | >1 h | >1 h | >1 h |
| Maneuver speed | High Speed | Low speed | High speed | High Speed | High Speed |
| Flexible deployment of communication | No | No | No | Yes | No |
| Cost effective | Expensive | Cheap | Expensive | Cheap | Cheap |
| Endurance | High | Low | Medium | Low | High |
| Technique | Channel Width | Band | Bit Rate | Range | Latency | Mobility Support |
|---|---|---|---|---|---|---|
| Wi-Fi | 20 MHz | 2.4 GHz to 5.2 GHz | 6–54 Mbps | 100 m | 10 ms | Low |
| GPS | 2 MHz | 1176 to 1576 MHz | 50 bps | - | 10 ms | Higher |
| UMTS | 5 MHz | 700 to 2600 MHz | 2 Mbps | 10 Km | 20–70 ms | High |
| 5G | 2.16 GHz | 57 to 64 GHz | Up to 4 Gbps | 50 m | - | Ultra-High |
| LTE | 20 MHz | 700 to 2690 MHz | Up to 300 Mbps | 30 Km | 10 ms | Very High |
| LTE-A | Up to 100 MHz | 450 MHz to 4.99 GHz | Up to 1 Gbps | - | Very High |
| Type of Communication | Elevation in Km | Number of Satellites | Satellite Life | Handoff Frequency | Doppler | Gateway Cost | Propagation Path Loss |
|---|---|---|---|---|---|---|---|
| Geostationary Earth orbit (GEO) | Up to 36,000 | 3, no polar coverage | 15+ | NA | Low | Very expensive | Highest |
| Medium Earth orbit (MEO) | 5000–15,000 | 8–20 global | 10–15 | Low | Medium | Expensive | High |
| Low Earth orbit (LEO) | 500–1500 | 40–800 global | 3–7 | High | High | Cheap | Least |
| Vulnerability Type | Description |
|---|---|
| Malware issue | In various cases, it has been observed that these UAVs are generally connected and controlled via cell phone or any sort of remote control. These techniques are, thus far, not safe [43] and, therefore, the UAVs are easy to be hacked using a reverse-shell TCP payload that can be injected into UAV memory. Furthermore, this leads to installation of malware over UAVs automatically. |
| Spoofing | These are the issues related to the communication method, usually with serial port connections that are not encrypted properly [44]. Due to this spoofing issue, the information associated with GPS can be taken and altered. |
| Manipulation and other common concerns | The flying paths which UAVs must track are pre-programmed before; therefore, these paths can be altered [45], whereas the common issues are related to wind, overheating, or any predator bird harming the lightweight drone easily [46]. |
| Physical design and control system constraints | There are various challenges with unmanned aerial vehicle control system design, such as the sluggish convergence rate, which prevents the drone from performing fast or aggressive maneuvers, and one may notice faults in the flight or divergence from the target trajectory [47,59,60]. This slow convergence rate and glitches are caused by the physical architecture of drones or the planned control system, which is primarily intended to stabilize the drone in uncertain conditions. |
| Sensorization issue | Since these UAVs depend on sensors, thus, it is also proved that the ultrasonic waves may attack the MEMS gyro sensors [47]. |
| Wi-Fi constraints | Operating drones using a Wi-Fi facility may be risky. This is proved in [48] where the connection was disrupted with the help of software and changing the control of the UAV. |
| GPS issue | Automatic Dependent Surveillance–Broadcast depends on the GPS module, which is not encrypted sometimes and may lead to spoofing [49]. |
| Firmware issue | The bugs available in the first prototype and first algorithm which come to the front after usage [50]. |
| Sky Jack-based attacks | Sky Jack is one software used to conduct the attacks related to de-authentication of targets during control [51]. |
| Controller issues | These issues are related to the operation control unit and may puzzle the controller by changing the live feed to some other video [52]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abro, G.E.M.; Zulkifli, S.A.B.M.; Masood, R.J.; Asirvadam, V.S.; Laouiti, A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. https://doi.org/10.3390/drones6100284
Abro GEM, Zulkifli SABM, Masood RJ, Asirvadam VS, Laouiti A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones. 2022; 6(10):284. https://doi.org/10.3390/drones6100284
Chicago/Turabian StyleAbro, Ghulam E. Mustafa, Saiful Azrin B. M. Zulkifli, Rana Javed Masood, Vijanth Sagayan Asirvadam, and Anis Laouiti. 2022. "Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats" Drones 6, no. 10: 284. https://doi.org/10.3390/drones6100284
APA StyleAbro, G. E. M., Zulkifli, S. A. B. M., Masood, R. J., Asirvadam, V. S., & Laouiti, A. (2022). Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones, 6(10), 284. https://doi.org/10.3390/drones6100284