

Detection of Micro-Doppler Signals of Drones Using Radar Systems with Different Radar Dwell Times


Abstract
:1. Introduction
2. Materials and Methods
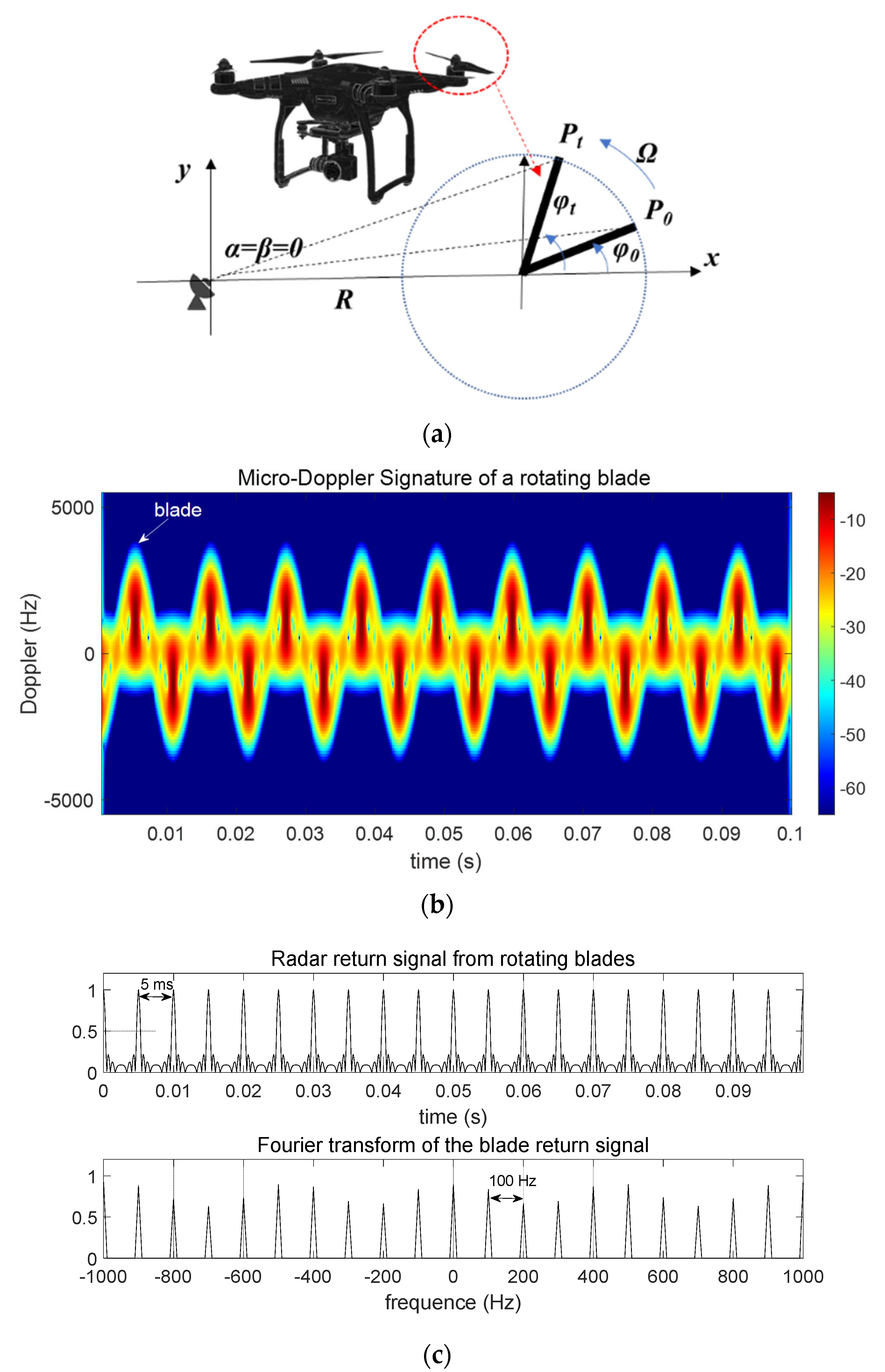
2.1. Micro-Doppler of Rotating Blades of Drones
2.2. Experimental Conditions
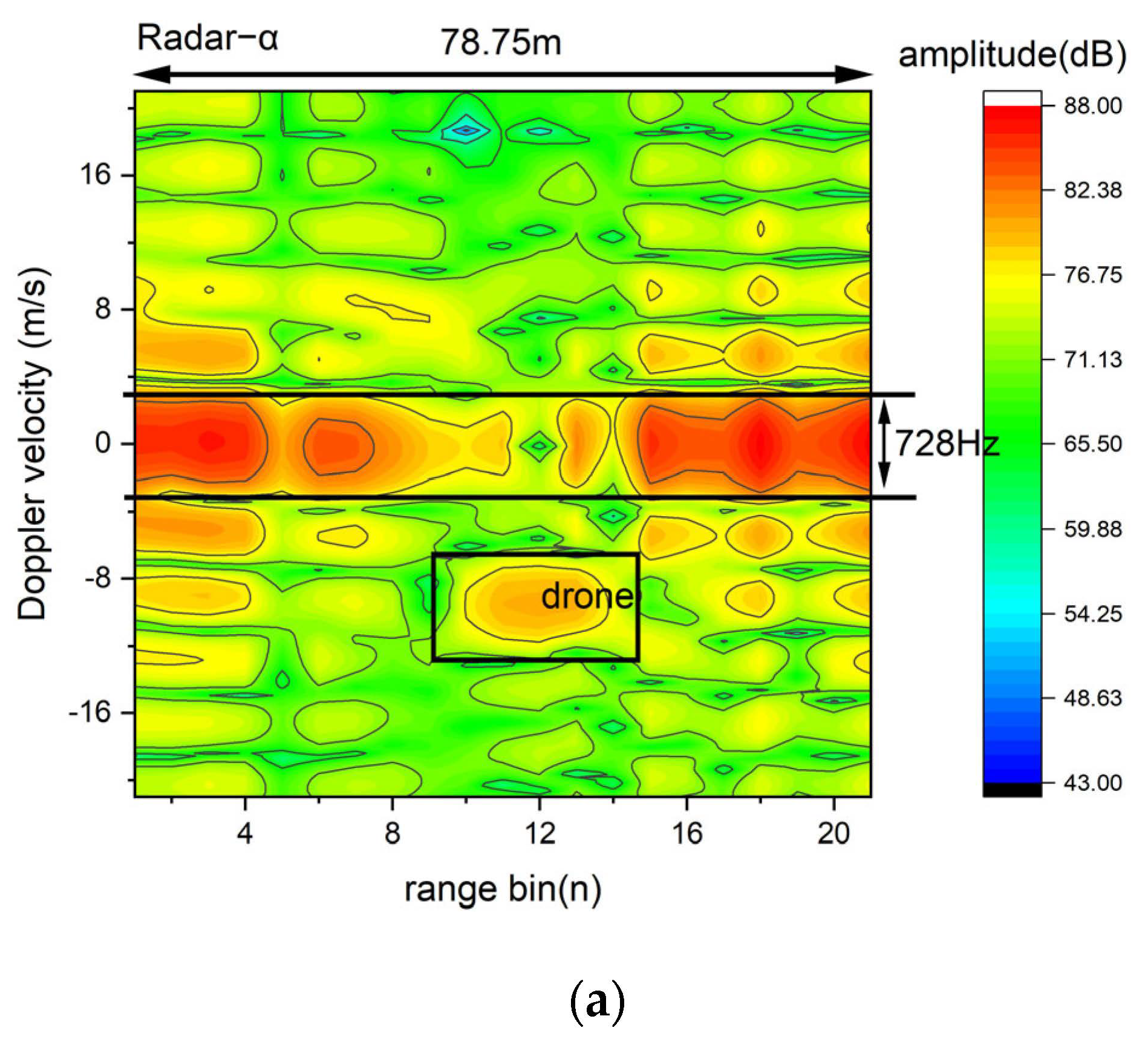
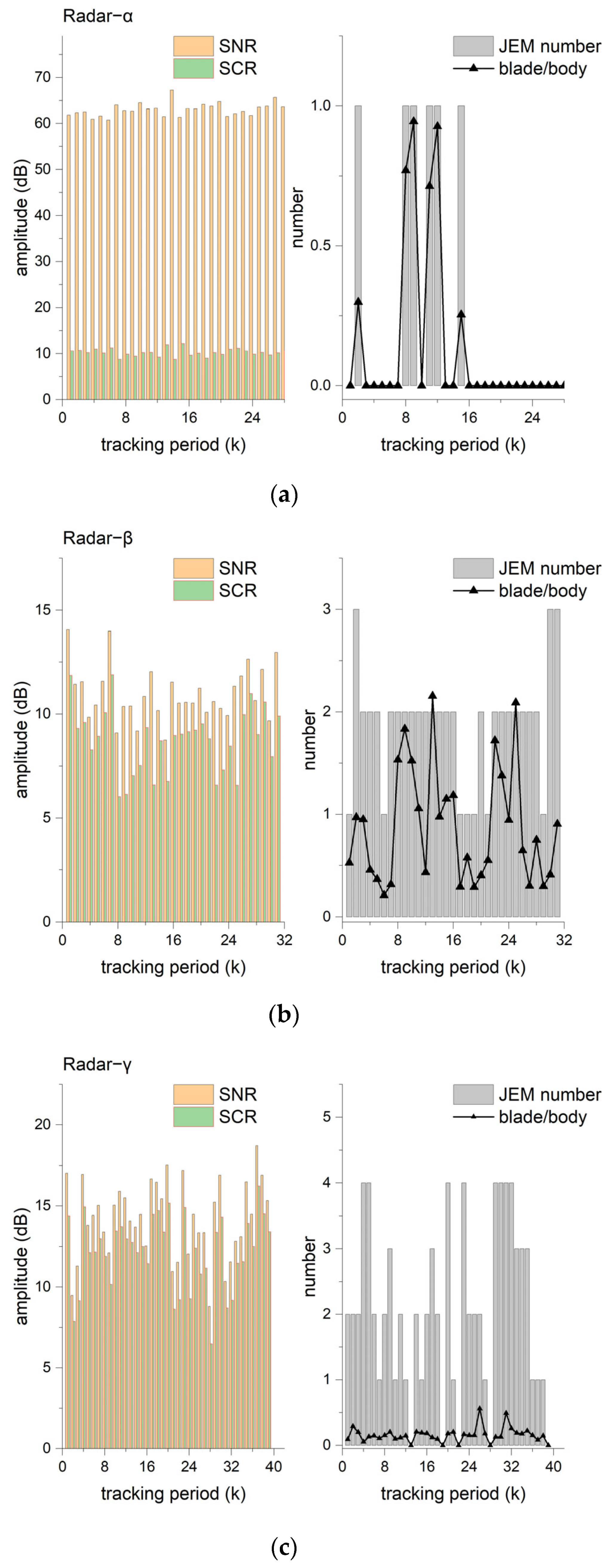
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Musa, S.A.; Abdullah, R.S.A.R.; Sali, A.; Ismail, A.; Rashid, N.E.A.; Ibrahim, I.P.; Salah, A.A. A review of copter drone detection using radar systems. Def. S&T Tech. Bull. 2019, 12, 16–38. [Google Scholar]
- Wellig, P.; Speirs, P.; Schuepbach, C.; Oechslin, R.; Renker, M.; Boeniger, U.; Pratisto, H. Radar systems and challenges for C-UAV. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–8. [Google Scholar]
- Galati, G.; Pavan, G. Calibration of an X-band commercial radar and reflectivity measurements in suburban areas. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 4–11. [Google Scholar] [CrossRef]
- Roldan, I.; del-Blanco, C.R.; Duque de Quevedo, Á.; Ibañez Urzaiz, F.; Gismero Menoyo, J.; Asensio López, A.; Berjón, D.; Jaureguizar, F.; García, N. DopplerNet: A convolutional neural network for recognising targets in real scenarios using a persistent range–Doppler radar. IET Radar Sonar Navig. 2020, 14, 593–600. [Google Scholar] [CrossRef]
- De Wit, J.J.M.; Gusland, D.; Trommel, R.P. Radar Measurements for the Assessment of Features for Drone Characterization. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 10–15 January 2021; pp. 38–41. [Google Scholar] [CrossRef]
- Park, J.; Jung, D.H.; Bae, K.B.; Park, S.O. Range-Doppler Map Improvement in FMCW Radar for Small Moving Drone Detection Using the Stationary Point Concentration Technique. IEEE Trans. Microw. Theory Tech. 2020, 68, 1858–1871. [Google Scholar] [CrossRef]
- Zulkifli, S.; Balleri, A. Design and Development of K-Band FMCW Radar for Nano-Drone Detection. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–5. [Google Scholar]
- Balal, N.; Richter, Y.; Pinhasi, Y. Identifying low-RCS targets using micro-Doppler high-resolution radar in the millimeter waves. In Proceedings of the 14th European Conference on Antennas and Propagation, EuCAP 2020, Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- Bjorklund, S.; Wadstromer, N. Target Detection and Classification of Small Drones by Deep Learning on Radar Micro-Doppler. In Proceedings of the 2019 International Radar Conference, RADAR 2019, Toulon, France, 23–27 September 2019; pp. 1–6. [Google Scholar]
- Beasley, P.; Ritchie, M.; Griffiths, H.; Miceli, W.; Inggs, M.; Lewis, S.; Kahn, B. Multistatic Radar Measurements of UAVs at X-band and L-band. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Jahangtr, M.; Atkinson, G.M.; Antoniou, M.; Baker, C.J.; Sadler, J.P.; Reynolds, S.J. Measurements of Birds and Drones with L-Band Staring Radar. In Proceedings of the 2021 21st International Radar Symposium (IRS), Berlin, Germany, 21–22 June 2021; pp. 1–10. [Google Scholar]
- Blake, W.; Burger, I. Small Drone Detection Using Airborne Weather Radar. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–4. [Google Scholar]
- Palamà, R.; Fioranelli, F.; Ritchie, M.; Inggs, M.; Lewis, S.; Griffiths, H. Measurements and discrimination of drones and birds with a multi-frequency multistatic radar system. IET Radar Sonar Navig. 2021, 15, 841–852. [Google Scholar] [CrossRef]
- Mizushima, T.; Nakamura, R.; Hadama, H. Reflection characteristics of ultra-wideband radar echoes from various drones in flight. In Proceedings of the 2020 IEEE Topical Conference on Wireless Sensors and Sensor Networks, WiSNeT 2020, Antonio, TX, USA, 26–29 January 2020; pp. 30–33. [Google Scholar]
- Huang, A.; Sévigny, P.; Balaji, B.; Rajan, S. Fundamental Frequency Estimation of HERM Lines of Drones. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 1013–1018. [Google Scholar]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and classification of multirotor drones in radar sensor networks: A review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.Y.; Kim, H.J.; Lee, J.H.; Yang, S.J.; Myung, N.H. Automatic feature extraction from insufficient JEM signals based on compressed sensing method. In Proceedings of the 2015 Asia-Pacific Microwave Conference (APMC), Nanjing, China, 6–9 December 2016; Volume 2, pp. 1–3. [Google Scholar]
- Wölfel, M.; McDonough, J. Minimum variance distortionless response spectral estimation. IEEE Signal Process. Mag. 2005, 22, 117–126. [Google Scholar] [CrossRef]
- Elbir, A.M. DeepMUSIC: Multiple Signal Classification via Deep Learning. IEEE Sens. Lett. 2020, 4, 7001004. [Google Scholar] [CrossRef]
- Sun, H.; Oh, B.S.; Guo, X.; Lin, Z. Improving the Doppler Resolution of Ground-Based Surveillance Radar for Drone Detection. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3667–3673. [Google Scholar] [CrossRef]
- Ritchie, M.; Capraru, R.; Fioranelli, F. Dop-net: A micro-Doppler radar data challenge. Electron. Lett. 2020, 56, 568–570. [Google Scholar] [CrossRef] [Green Version]
- Chen, V.C. The Micro-Doppler Effect in Radar; Artech House: Norwood, MA, USA, 2011; ISBN 9781608070572/1608070573. [Google Scholar]
- Kim, B.K.; Kang, H.S.; Park, S.O. Experimental Analysis of Small Drone Polarimetry Based on Micro-Doppler Signature. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1670–1674. [Google Scholar] [CrossRef]
- Molchanov, P.; Harmanny, R.I.A.; De Wit, J.J.M.; Egiazarian, K.; Astola, J. Classification of small UAVs and birds by micro-Doppler signatures. Int. J. Microw. Wirel. Technol. 2014, 6, 435–444. [Google Scholar] [CrossRef]
- Gong, J.; Yan, J.; Li, D.; Chen, R.; Tian, F.; Yan, Z. Theoretical and experimental analysis of radar micro-doppler signature modulated by rotating blades of drones. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 1659–1663. [Google Scholar] [CrossRef]
- Skolnik, M. Radar Handbook, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Tait, P. Introduction to Radar Target Recognition; Institution of Electrical Engineers: London, UK, 2006; ISBN 9781849190831. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model (Vendor; Country) | Radar Band | Update Rate (Hz) 2 | Range (km) 3 | Identification Strategy 4 |
|---|---|---|---|---|
| Retinar FAR-AD (Meteksan; Turkey) | Ku | 4/15 | 4.4 | Micro-Doppler |
| Gamekeeper 16U (AVEILLANT; UK) | L | 4 | 5 | Micro-Doppler, tracking data. |
| A800(Blighter; UK) | Ku | 1/4 | 3 | Micro-Doppler |
| XENTA-M1 (Weibel; Danish) | X | 1 | 10 | Range-Doppler, micro-Doppler. |
| ReGUARD (Retia; Czech Republic) | X | 1/4 | 6 | Rada cross section (RCS) |
| ELM/2026BF (IAI; Israel) | X | 5.2 | Tracking data | |
| Spyglass™ (Numerica; USA) | Ku | Tracking data | ||
| Gryphon R1400/R1410 (SRC; USA) | X | 8.5 | Tracking data | |
| ELVIRA (Robin; Netherlands) | X | 2/3 | 2.7 | AI, micro-Doppler |
| Giraffe 1X (SAAB; Sweden) | X | 1 | 13 | AI, kinematic, RCS micro-Doppler, etc. |
| GO20 MM (Thales; France) | X | 1/6 | 4 | AI, micro-Doppler |
| Parameters | Radar−α | Radar−β | Radar−γ |
|---|---|---|---|
| Radar band | X | X | X |
| CPI (ms) | 2.7 | 20 | 89 |
| PRF (kHz) | 33.3 | 5 | 2.8 |
| Sampling points after zero padding | 2048 | 256 | 256 |
| Frequency resolution (Hz) | 16 | 19 | 11 |
| Doppler resolution (m/s) | 0.163 | 0.285 | 0.165 |
| Range resolution (m) | 3.75 | 12 | 10 |
| Beamwidth | 0.97° | 0.72° | 2° |
| Detection range (m) | 3000 | 10,000 | 6000 |
| Width of the wavefront (m) | 50.7 | 125.6 | 209.4 |
| Space resolution (m2) | 190.1 | 1507.2 | 2094 |
| Radar dwell time per square meter (ms/m2) | 0.014 | 0.013 | 0.042 |
| Contents | Radar−α | Radar−β | Radar−γ |
|---|---|---|---|
| Detection range (km) | ~3 km | ~10 km | ~6 km |
| Doppler velocity (m/s) | 8.29 | 4.70 | 13.00 |
| Mean SNR (dB) | 63.01 | 10.98 | 14.22 |
| Mean SCR (dB) | 10.23 | 8.71 | 12.17 |
| Probability of JEM signals | 21.42% | 100% | 12.82% |
| Number of JEM peaks | 0.18 | 1.87 | 2.05 |
| The ratio of the blade’s magnitude to that of the body | 0.65 | 0.88 | 0.16 |
| Frequency offset between blade and body (Hz) | 469 | 165 | 158 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Yan, J.; Li, D.; Kong, D. Detection of Micro-Doppler Signals of Drones Using Radar Systems with Different Radar Dwell Times. Drones 2022, 6, 262. https://doi.org/10.3390/drones6090262
Gong J, Yan J, Li D, Kong D. Detection of Micro-Doppler Signals of Drones Using Radar Systems with Different Radar Dwell Times. Drones. 2022; 6(9):262. https://doi.org/10.3390/drones6090262
Chicago/Turabian StyleGong, Jiangkun, Jun Yan, Deren Li, and Deyong Kong. 2022. "Detection of Micro-Doppler Signals of Drones Using Radar Systems with Different Radar Dwell Times" Drones 6, no. 9: 262. https://doi.org/10.3390/drones6090262
APA StyleGong, J., Yan, J., Li, D., & Kong, D. (2022). Detection of Micro-Doppler Signals of Drones Using Radar Systems with Different Radar Dwell Times. Drones, 6(9), 262. https://doi.org/10.3390/drones6090262