
High Performance Convertible Coleopter Drones


Abstract
:1. Introduction
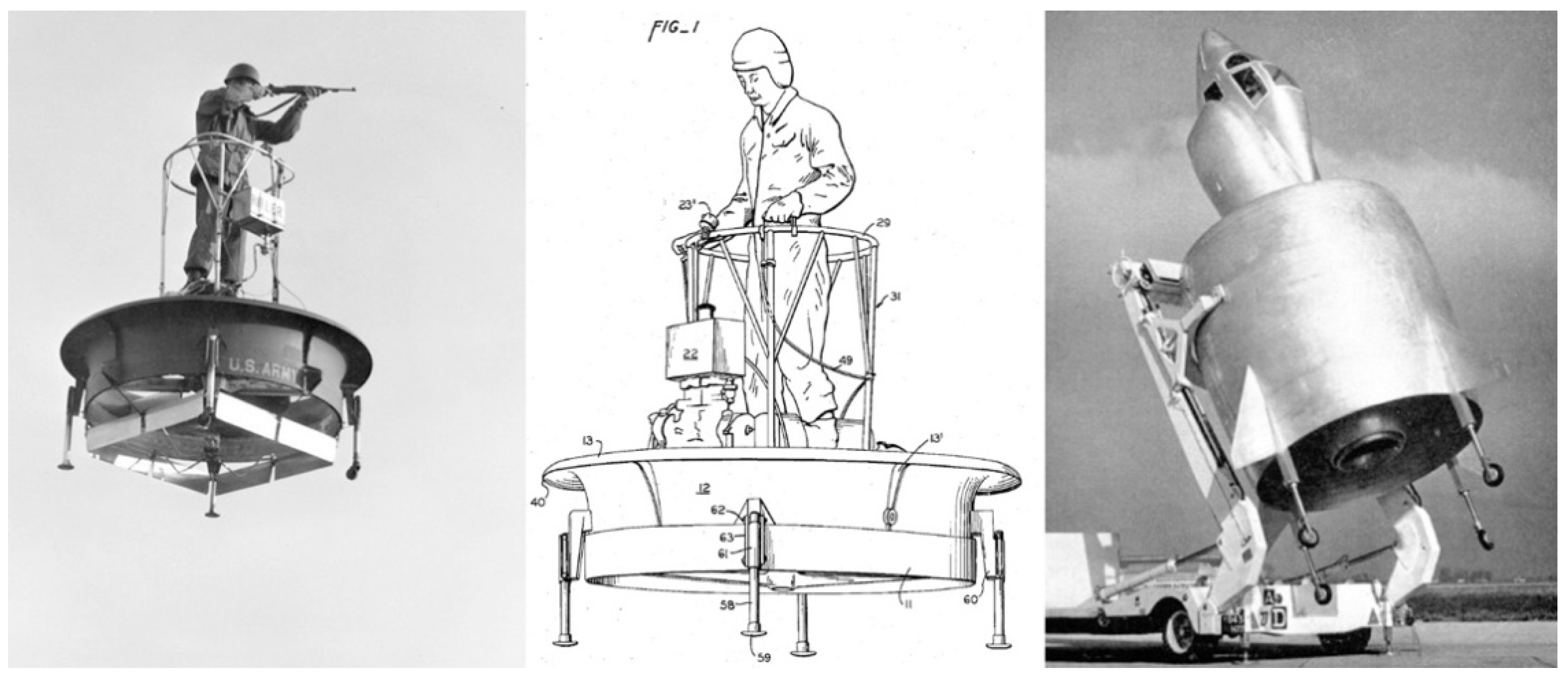
1.1. The US Department of Defense’s First Micro Aerial Vehicle (MAV)
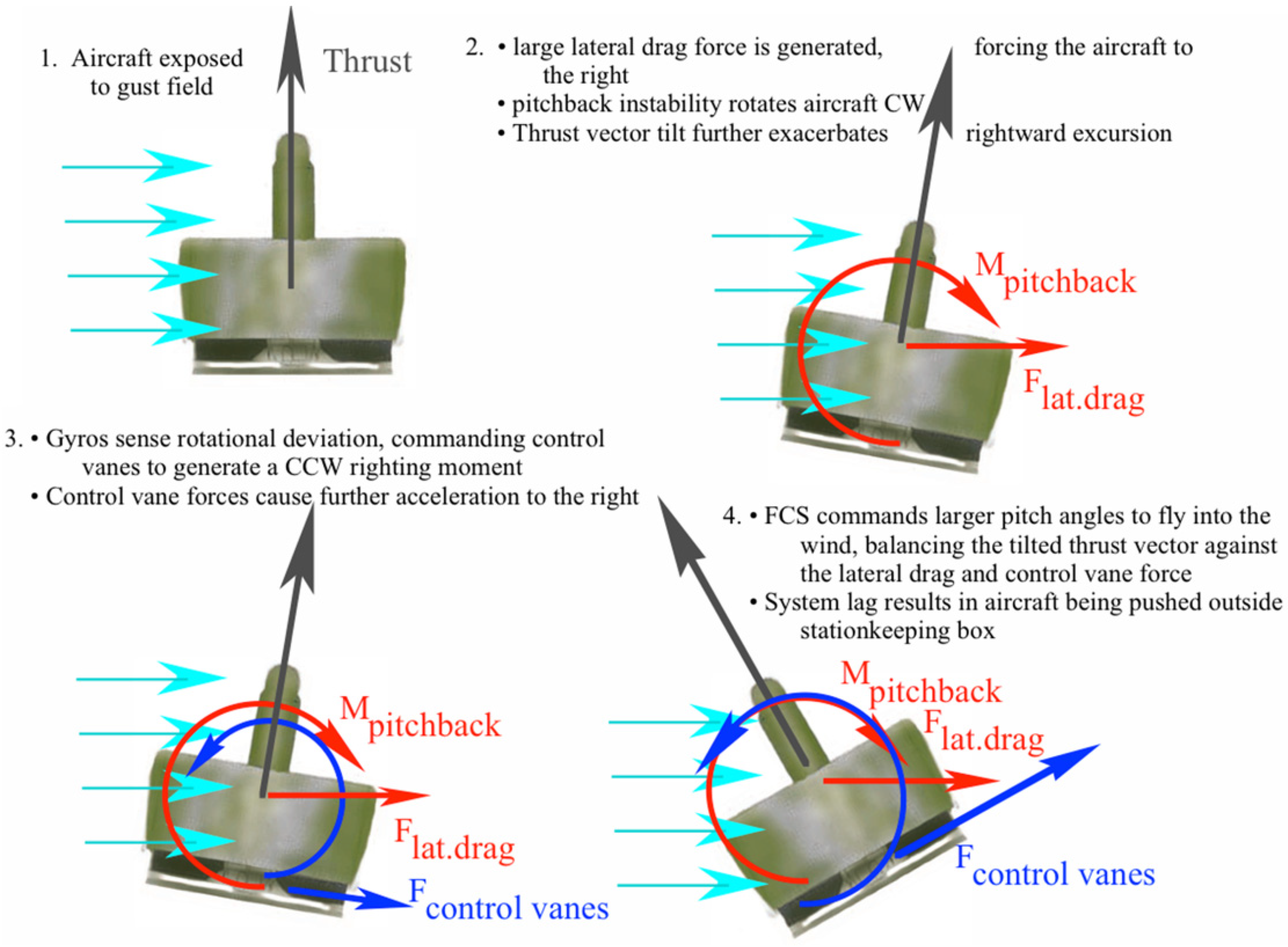
1.2. DARPA Organic Aerial Vehicle (OAV) Competition and Problems with Basic Physics
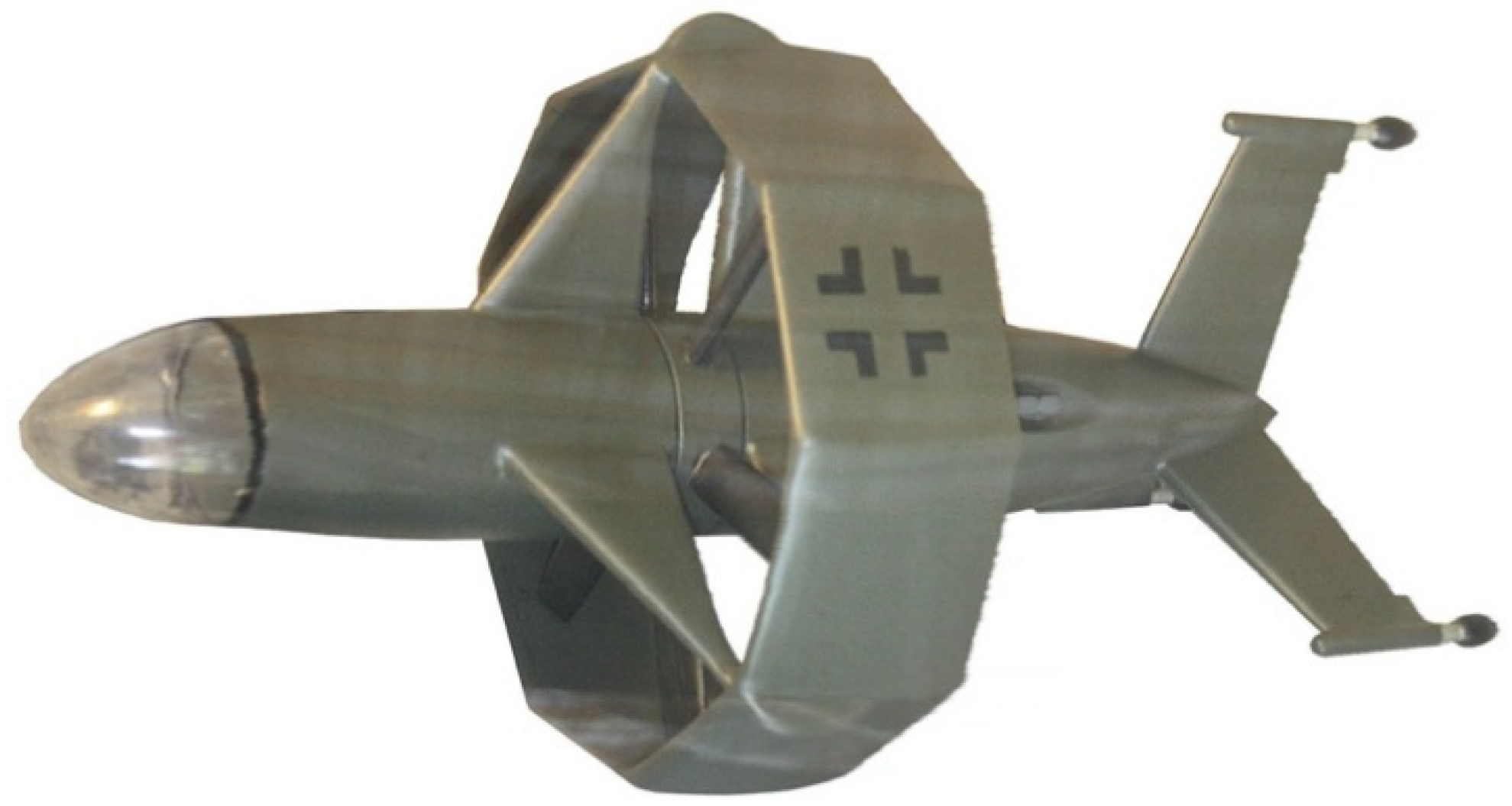
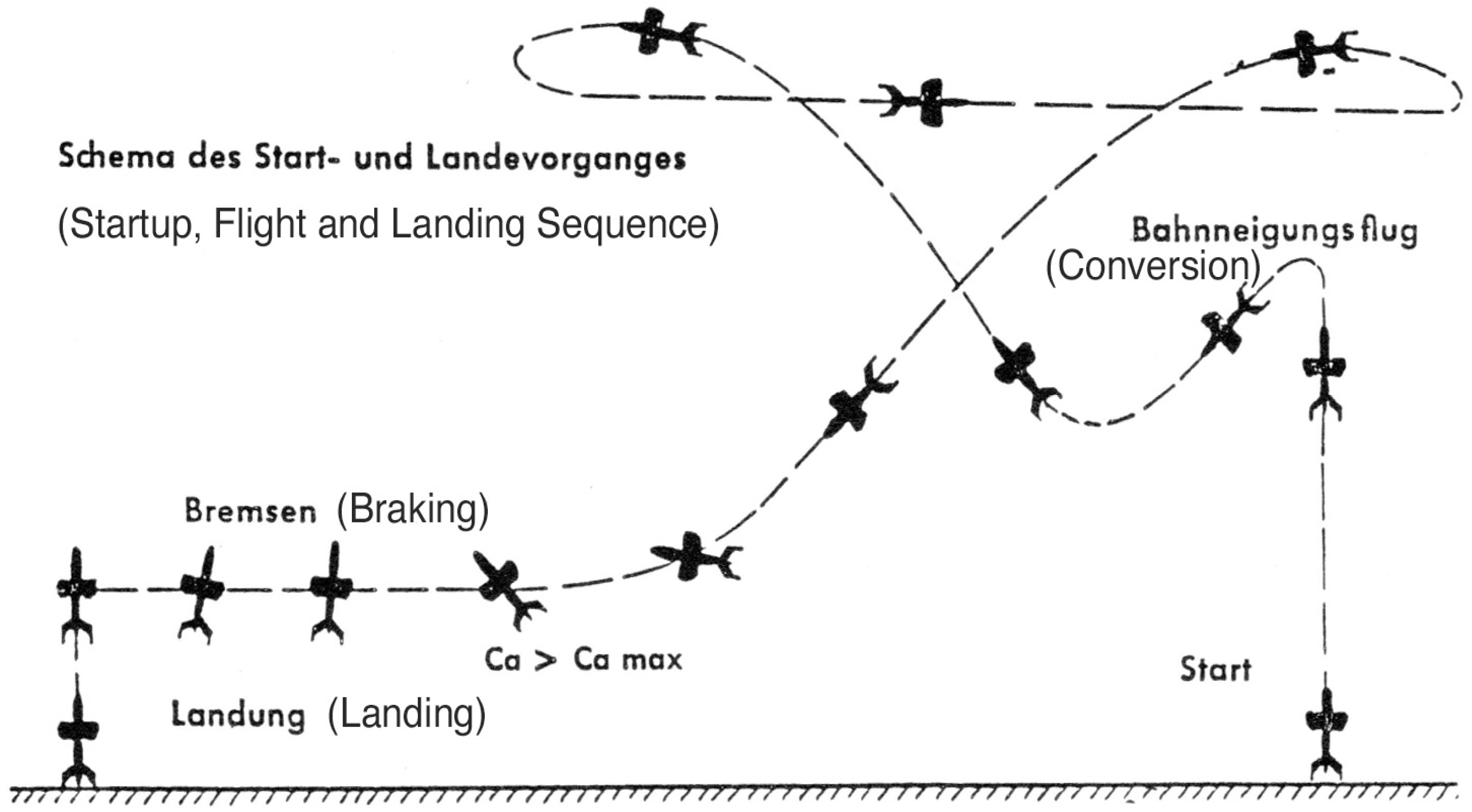
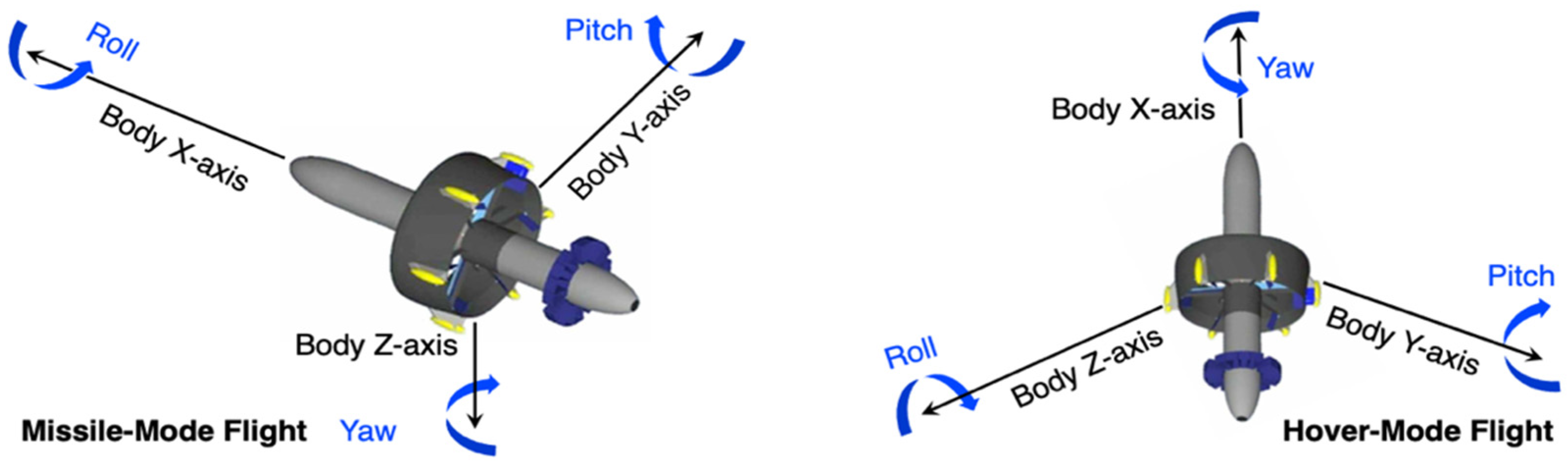
1.3. Hover, Conversion and Dash Stability—A Workable Coleopter Configuration from 1944
2. A Utilitarian Coleopter Configuration: The XQ-138
2.1. XQ-138 Design Drivers and Overall Configuration
2.2. XQ-138 Structural Layouts and Weight Trending
3. Bench, Hover Stand, and Flight Testing
3.1. Bench and Hover Stand Testing
3.2. Launch, Conversion/Divergence, and Dash-Speed Testing
3.3. Range Testing
4. Experimental Technique, Blade Treatment, and Hover and Free Flight Test Data
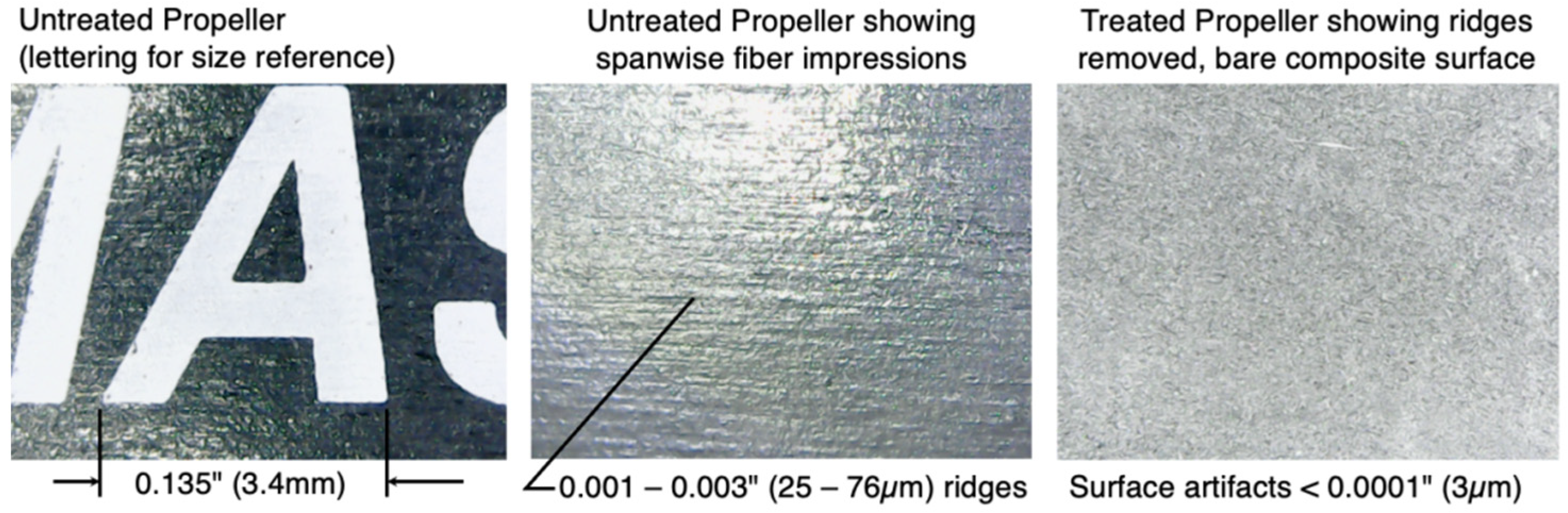
4.1. Blade Treatment
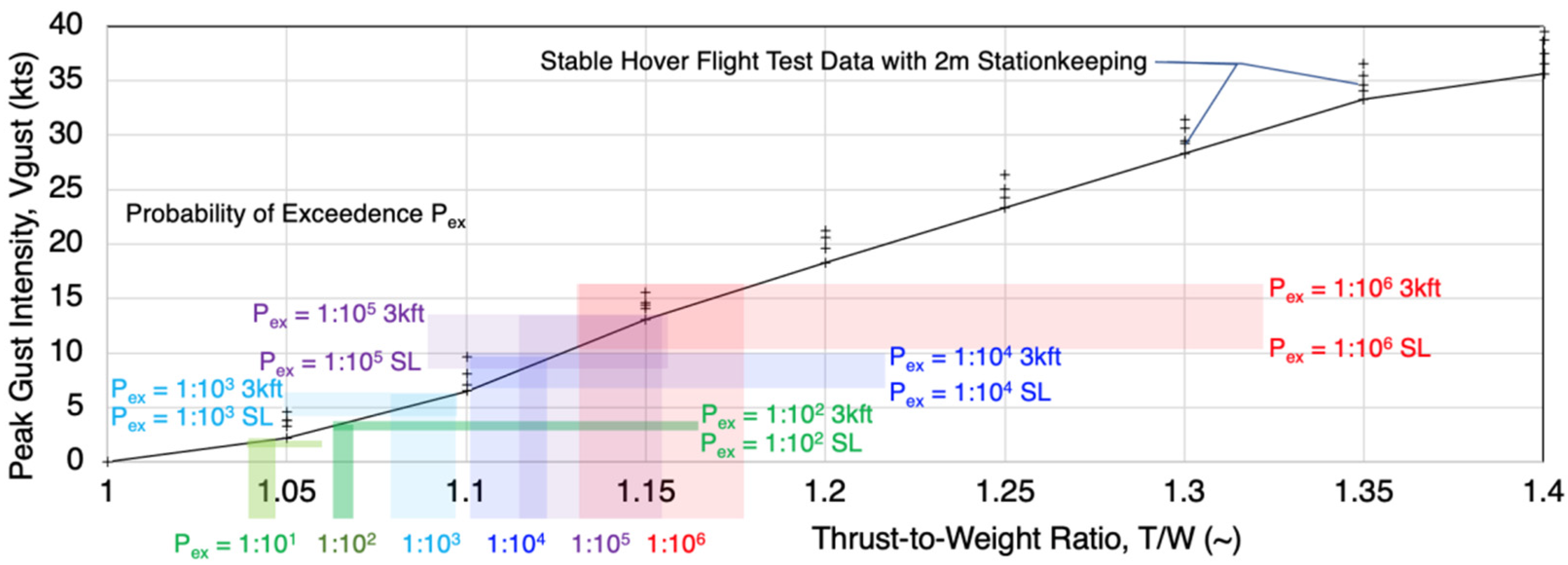
4.2. Hover, Takeoff, and Stationkeeping Performance
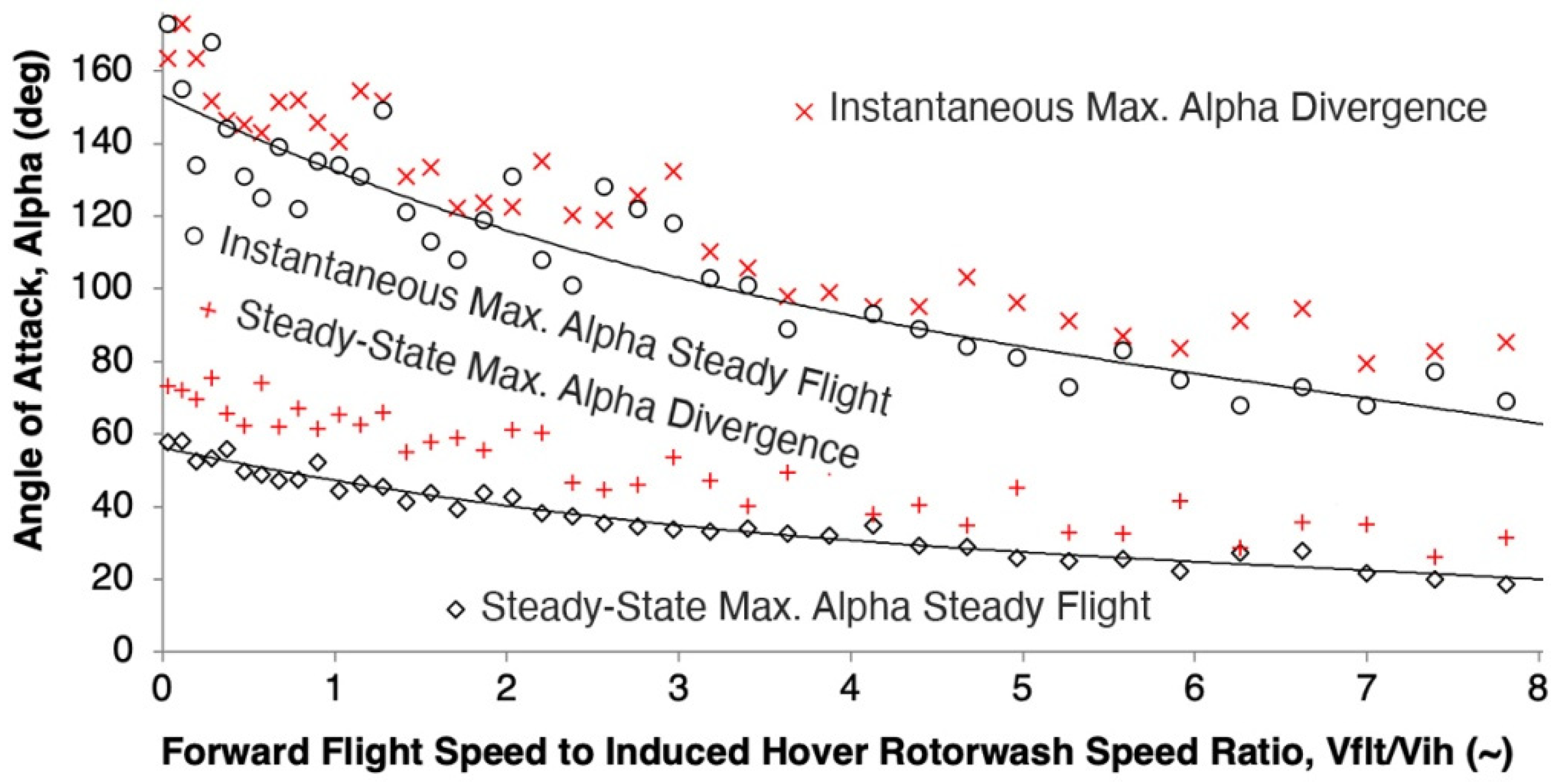
4.3. Dash-to-Hover Conversion
4.4. Vertical Descent
4.5. Dash Speed Testing
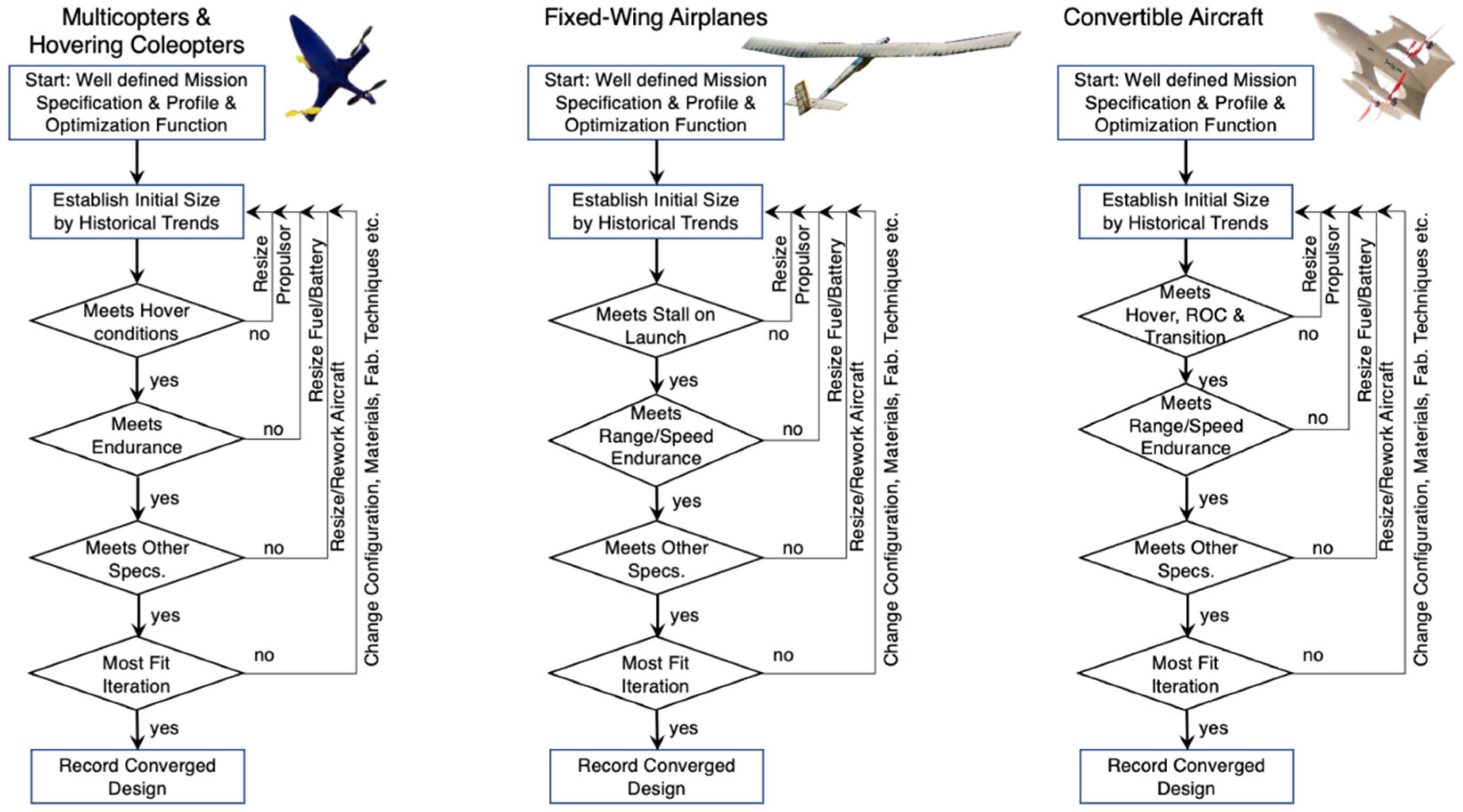
5. Differences in Design Procedures between Conventional and Convertible UAVs
6. Intellectual Property Status
7. Conclusions
8. Future Work
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Definition | Units |
| A | Rotor Disk Area | ft2 (m2) |
| Fr | Weight Fraction (Wi/WTO) | % |
| M | Figure of Merit | % |
| MGWTO | Maximum Gross Weight at Take Off | lbf (N, gmf) |
| OWE | Operating Empty Weight | lbf (N, gmf) |
| P | Power | hp (ft-lbf/s, W) |
| q | Dynamic Pressure | psf (psi, Pa) |
| Rn | Reynolds Number | ~ |
| ROC | Rate of Climb | fpm (m/s) |
| S | Wing Area | ft2 (m2) |
| T | Thrust | lbf (N, gmf) |
| TAS | True Airspeed | kts, (ft/s, m/s, mph, kph) |
| V | True Airspeed | kts, (ft/s, m/s, mph, kph) |
| W | Weight | lbf (N, gmf) |
| α | Angle of Attack | deg. |
| β | Sideslip Angle | deg. |
| φ | Rotor Diameter | in (cm, m) |
| ρ | Air Density | slug/ft3 (kg/m3) |
| Subscripts | ||
| av. | Available | |
| c | Climb | |
| E | Empty | |
| flt. | Flight (speed) | |
| gust | Gust (speed) | |
| ih | Induced in Hover | |
| h | Hover | |
| max. | Maximum | |
| min. | Minimum | |
| OE | Operating Empty | |
| rq’d | Required | |
| s | Shaft | |
| TO | Takeoff | |
| Acronyms | ||
| AAL | Adaptive Aerostructures Laboratory | |
| AGL | Above Ground Level | |
| APC | Advanced Precision Composites | |
| B/W | Black-and White (camera) | |
| CDTO | US CounterDrug Technology Office | |
| CFD | Computational Fluid Dynamics | |
| DARPA | US Defense Advanced Research Projects Agency | |
| DoD | US Department of Defense | |
| FCS | Future Combat System | |
| GPS | Global Positioning System | |
| GNC | Guidance Navigation and Control | |
| H | Helicopter | |
| HIGE | Hover In Ground Effect | |
| HOGE | Hover Out of Ground Effect | |
| ICBM | International Continental Ballistic Missile | |
| IR | Infrared | |
| LuMAV | Lutronix Micro Aerial Vehicle | |
| MASS | Micro Autonomous Systems | |
| MAV | Micro Aerial Vehicle | |
| MOUT | Military Operations in Urban Terrain | |
| NiDAQ | National Instruments Digital Acquisition System | |
| OAV | Organic Aerial Vehicle | |
| OF | Optimization Function | |
| OS | Ogawa Seisakusho | |
| Q | Uninhabited | |
| RFP | Request for Proposal | |
| SAS | Stability Augmentation System | |
| SNECMA | Société Nationale d’Études et de Construction de Moteurs d’Aviation | |
| STP | Standard Temperature and Pressure | |
| UAV | Uninhabited Aerial Vehicle | |
| UV | Ultraviolet | |
| VTOL | Vertical Takeoff and Landing | |
| TOW | Tube-Launched Optically Tracked, Wire Guided | |
| TTO | Tactical Technology Office | |
| WW | World War | |
| X | Experimental | |
References
- Barrett, R.M. Adaptive aerostructures: The first decade of flight on uninhabited aerial vehicles. In Proceedings of the Smart Structures and Materials 2004: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 16–18 March 2004; Volume 5388. [Google Scholar]
- Barrett, R.M. 20 Years of Adaptive Aerostructures in Flying Missiles, Munitions and UAVs. In Proceedings of the ASME 2014 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Newport, RI, USA, 8–10 September 2014. [Google Scholar]
- Proctor, P. Adaptive Rotor Makes First Flight. Aviation Week and Space Technology, 31 March 1997; 47. [Google Scholar]
- Smithsonian Institution. Hiller Model 1031-A-1 Flying Platform; Smithsonian Institution: Washington, DC, USA, 1955; Available online: https://airandspace.si.edu/collection-objects/hiller-model-1031-a-1-flying-platform/nasm_A19610070000 (accessed on 12 August 2022).
- Robertson, A.C.; Joseph Stuart, R.A.W., III. Vertical Take-Off Flying Platform. U.S. Patent 2,953,321, 27 February 1956. [Google Scholar]
- George, E.; Rodgers, F. French Military Aircraft Types Today. Naval Aviation News, 1 October 1959; 24. [Google Scholar]
- Lee, G. Organic Aerial Vehicle Phase I Proposal to DARPA TTO for Solicitation No. PS01-01; Lutronix Corporation: Del Mar, CA, USA, 2001. [Google Scholar]
- Barrett, R. Developmental History of a New Family of Subscale Convertible, High Performance UAVs. In Proceedings of the Micro Aerial Vehicles—Unmet Technological Requirements, Schloß Elmau, Germany, 22–24 September 2003. [Google Scholar]
- Graf, W.; Fleming, J.; Ng, W. Improving Ducted Fan UAV Aerodynamics in Forward Flight. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. paper no. AIAA-2008-430. [Google Scholar]
- Deng, S.; Wang, S.; Zhang, Z. Aerodynamic performance assessment of a ducted fan UAV for VTOL applications. Aerosp. Sci. Technol. 2020, 103, 105895. [Google Scholar] [CrossRef]
- Ryu, M.; Cho, L.; Cho, J. Aerodynamic Analysis of the Ducted Fan for a VTOL UAV in Crosswinds. Trans. Jpn. Soc. Aeronaut. Space Sci. 2016, 59, 47–55. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Zhang, B.; Huang, T. CFD Study of an Annular-Ducted Fan Lift System for VTOL Aircraft. Aerospace 2015, 2, 555–580. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Barakos, G. Review on ducted fans for compound rotorcraft. Aeronaut. J. 2020, 124, 941–974. [Google Scholar] [CrossRef]
- Cai, H.; Ang, H. Design and Analysis of a Ducted Fan UAV. J. Vibroeng. 2011, 13, 1392–8716. [Google Scholar]
- Weiwei, F.; Yanxuan, W.; Yang, C.; Zhengjie, W. Dynamic analysis and CFD calculation of a differential control type for ducted fan UAV. In Proceedings of the 2014 International Conference on Modelling, Identification and Control, Melbourne, Australia, 3–5 December 2014. [Google Scholar]
- Zhang, W.; Fan, N.J. Dynamic Analysis of a Ducted Fan UAV in Forward Flight. Appl. Mech. Mater. 2012, 224, 510–513. [Google Scholar] [CrossRef]
- Moaad, Y.; Alaaeddine, J.; Jawad, K.; Tarik, B.K.; Lekman, B.; Hamza, J.; Patrick, H. Design and optimization of a ducted fan VTOL MAV controlled by Electric Ducted Fans. In Proceedings of the 8th European Conference for Aeronautics and Aerospace Sciences (Eucass), Madrid, Spain, 1–4 July 2019. [Google Scholar]
- Cai, H.; Zhang, Z.; Deng, S. Numerical Prediction of Unsteady Aerodynamics of a Ducted Fan Unmanned Aerial Vehicle in Hovering. Aerospace 2022, 9, 318. [Google Scholar] [CrossRef]
- Omar, Z. Intelligent Control of a Ducted-Fan VTOL UAV with Conventional Control Surfaces; Royal Melbourne Institute of Technology: Melbourne, Australia, 2010. [Google Scholar]
- Herwig, D. Luftwaffe Secret Projects: Ground Attack & Special Purpose Aircraft; Midland Publishing Ltd.: Shepperton, UK, 2004. [Google Scholar]
- Nowarra, H.J. Die Deutsche Luftrüstung 1933–1945: Band 2 Flugzeugtypen Erla-Heinkel; Bernard & Graefe Verlag: Koblenz, Germany, 1993; Volume 2, pp. 259–260 + 272. [Google Scholar]
- Allen, F. Bolt Upright: Convair’s and Lockheed’s VTOL fighters. Air Enthus. 2007, 127, 13–20. [Google Scholar]
- Rogers, M. VTOL: Military Research Aircraft; Orion Books: New York, NY, USA, 1989. [Google Scholar]
- Winchester, J. Concept Aircraft: Prototypes, X-Planes and Experimental Aircraft; Grange Books: Kent, UK, 2007. [Google Scholar]
- Tay, B. Is the SAF’s Defence Posture Still Relevant as the Nature of Warfare Continues to Evolve? Pointer J. Singap. Armed Forces 2016, 42, 25–32. [Google Scholar]
- Tan, A.T.H. Singapore’s Defence: Capabilities, Trends and Implications. Contemp. Southeast Asia 1999, 21, 451–474. [Google Scholar] [CrossRef]
- Cohen, E.A.; Huxley, T. Defending the Lion City: The Armed Forces of Singapore; Allen and Unwin: Singapore, 2000. [Google Scholar]
- Barrett, R.M. Convertible vertical take-off and landing miniature aerial vehicle. U.S. Patent 6,502,787, 7 January 2003. [Google Scholar]
- Parmar, T. Drones in Southeast Asia. 14 August 2015. Available online: https://dronecenter.bard.edu/drones-in-southeast-asia/ (accessed on 3 September 2022).
- Harkins, H. Russian/Soviet Submarine Launched Ballistic Missiles: Nuclear Deterrence/Counter Force Strike; Centurion Publishing: Washington, DC, USA, 2019. [Google Scholar]
- Zanfirov, A. Russia Ballistic Missiles; Watch Publishing: Lagos, Nigeria, 2020. [Google Scholar]
- Johnston, M.; Stevens, N.; Shiadinsky, A.; Bezyaev, I.; Antipov, V. For the Moon and Mars, N-1 A Reference Guide to the Soviet Superbooster; ARA Press: Livermore, CA, USA, 2014. [Google Scholar]
- Praed, B.M. Aviation the Pioneer Years; Studio Editions: London, UK, 1990. [Google Scholar]
- Science Photo Library. German Aeroplane Bomb, World War I, Library of Congress, 16 January 1915. Available online: https://www.sciencephoto.com/media/493149/view/german-aeroplane-bomb-world-war-i (accessed on 14 August 2022).
- Deutsche Digitale Bibliothek. 50 kg Carbonit-Bombe, Deutsches Reich; Stiftung Deutsches Historisches Museum: Berlin, Germany, 2018; Available online: https://www.deutsche-digitale-bibliothek.de/item/IVTUL56GEVIPLXDCOXEKTFMQHWDG5IQR (accessed on 14 August 2022).
- Christopher, J. The Race for Hitler’s X-Planes; The Mill: Gloucestershire, UK, 2013. [Google Scholar]
- Barrie, D. Russia’s High-Speed Air-To-Air Missile Upgrade; International Institute for Strategic Studies (IISS): London, UK, 2019; Available online: https://www.iiss.org/blogs/military-balance/2019/07/russia-high-speed-air-to-air-missile-upgrade (accessed on 12 August 2022).
- The MOAB: The Mother of All Bombs Comes with The Mother of All Price Tags Too. Special Operations Forces Report (SOFREP). 10 February 2022. Available online: https://sofrep.com/news/the-moab-the-non-nuclear-bomb-that-gave-isis-a-taste-of-their-own-medicine/ (accessed on 12 August 2022).
- Seemangal, R. SpaceX Test-Fires New Falcon 9 Block 5 Rocket Ahead of Maiden Flight. Popular Mechanics, 4 May 2018. [Google Scholar]
- Roskam, J. Airplane Flight Dynamics; DAR Corporation: Lawrence, KS, USA, 2000. [Google Scholar]
- APC Propellers. Performance Data; APC Propellers: Woodland, CA, USA, 2022; Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 17 August 2022).
- Master Airscrew. Master Airscrew Products; Master Airscrew: Rancho Cordova, CA, USA, 2022; Available online: https://www.masterairscrew.com/?gclid=CjwKCAjwo_KXBhAaEiwA2RZ8hMe1MZUW4aw5Bqv1ULCJrGxmdunEBJSi_-hqnXDLf1VOc3uPB6VLuxoCfIQQAvD_BwE (accessed on 17 August 2022).
- Leishman, J.G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- The United States Air Force. MIL-F-8785C, Military Specification: Flying Qualities of Piloted Airplanes; The United States Air Force: Washington, DC, USA, 1980. [Google Scholar]
- DJI. PHANTOM 4 PROSpecs. 24 July 2022. Available online: https://www.dji.com/phantom-4-pro/info (accessed on 3 September 2022).
- Abbott, J. Autel EVO Lite + Review. 15 August 2022. Available online: https://www.space.com/autel-evo-lite-plus-review (accessed on 3 September 2022).
- Parrot, Inc. Parrot Technical Specifications. 18 January 2021. Available online: https://www.parrot.com/us/drones/anafi-usa/technical-specifications (accessed on 3 September 2022).
- Drone Racing League (DRL). 179.78 MPH SPEED MACHINE. 3 September 2022. Available online: https://thedroneracingleague.com/racerx/#:~:text=179.78%20MPH%20SPEED%20MACHINE&text=After%20months%20of%20trial%20and,GUINNESS%20WORLD%20RECORDS%E2%84%A2%20title (accessed on 3 September 2022).
- Tech Force. 3 World’s Fastest Drones 2021!—Over 200 mph. 21 February 2021. Available online: https://www.youtube.com/watch?v=xc8apK_1Kkc (accessed on 3 September 2022).
- Rotor Drone Pro. DRL Racer Sets New World Speed Record! 11 April 2019. Available online: https://www.rotordronepro.com/drone-racing-league-drl-sets-new-speed-world-record-quadcopter/ (accessed on 3 September 2022).
- Project GoPro. 5 Fastest Drones in the World for Racing Like Crazy. 17 August 2021. Available online: https://projectgo.pro/fastest-drone/ (accessed on 3 September 2022).
- Barrett, R.M.; Honea, R.B.; Bramlette, R.B. Aerial Vehicles and Methods of Use. U.S. Patent US 9,878,257, 30 January 2018. [Google Scholar]
- Bramlette, R.; Johnston, T.; Barrett, R. Design, Construction, and Flight Testing of the World’s Fastest Micro-Scale Quadcopter. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Everett, H.R. Unmanned Systems of World Wars I and II; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Barrett, R. Adaptive Flight Control Actuators and Mechanisms for Missiles, Munitions and Uninhabited Aerial Vehicles (UAVs). In Advances in Flight Control Systems; Balint, A., Ed.; Intech: Rijeka, Croatia, 2011; pp. 1–22. [Google Scholar]
- Roskam, J. Airplane Design: Parts I–VIII; DAR Corporation: Lawrence, KS, USA, 2000. [Google Scholar]
- Prouty, R. Military Helicopter Design Technology; Jane’s Information Group: London, UK, 1989. [Google Scholar]
- Barrett, R.M. Statistical Time and Market Predictive Engineering Design (STAMPED) Techniques for Aerospace Preliminary Design: Regional Turboprop Application. J. Aeronaut. Aerosp. Eng. 2014, 3, 2–4. [Google Scholar] [CrossRef]
- Barrett, R. Statistical Time and Market Predictive Engineering Design (STAMPED) Techniques for Preliminary Aircraft Sizing. In Proceedings of the Challenges in European Aerospace (CEAS), Delft, The Netherlands, 7–11 September 2015. [Google Scholar]
- Barrett, R.M.; Honea, R.B.; Bramlette, R.B. Aerial Vehicle. U.S. Patent US D776,571 S, 17 January 2017. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| XQ-138(11) | XQ-138(6) | XQ-138(4) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mass | WTO | WOE | Mass | WTO | WOE | Mass | WTO | WOE | |
| (g) | Fraction | Fraction | (g) | Fraction | Fraction | (g) | Fraction | Fraction | |
| Structure | 771 | 31.4% | 46.9% | 136 | 36.0% | 46.3% | 44 | 38.1% | 41.7% |
| fuselage and rotor guard | 607 | 24.7% | 36.9% | 103 | 27.2% | 35.0% | 29 | 25.1% | 27.5% |
| muffler hard points | 12 | 0.5% | 0.7% | 4 | 1.1% | 1.4% | 3 | 2.6% | 2.8% |
| grid fins | 36 | 1.5% | 2.2% | 6 | 1.6% | 2.0% | 2 | 1.7% | 1.9% |
| undercarriage | 78 | 3.2% | 4.7% | 13 | 3.4% | 4.4% | 4 | 3.5% | 3.8% |
| fasteners | 28 | 1.1% | 1.7% | 5 | 1.3% | 1.7% | 2 | 1.7% | 1.9% |
| servo x-frame | 5 | 0.2% | 0.3% | 2 | 0.5% | 0.7% | 1 | 0.9% | 0.9% |
| mechanical and electrical conn. | 5 | 0.2% | 0.3% | 3 | 0.8% | 1.0% | 3 | 2.6% | 2.8% |
| Flight Control Actuators | 50 | 2.0% | 3.0% | 9 | 2.4% | 3.1% | 3.4 | 2.9% | 3.2% |
| pitch and yaw servos | 4 | 0.2% | 0.2% | 1 | 0.3% | 0.3% | 0.3 | 0.3% | 0.3% |
| p&y servo fasteners, wires, etc. | 10 | 0.4% | 0.6% | 2 | 0.5% | 0.7% | 0.6 | 0.5% | 0.6% |
| roll servos | 12 | 0.5% | 0.7% | 2 | 0.5% | 0.7% | 1 | 0.9% | 0.9% |
| roll servo fasteners, wires, etc. | 24 | 1.0% | 1.5% | 4 | 1.1% | 1.4% | 1.5 | 1.3% | 1.4% |
| Propulsion | 464.65 | 18.9% | 28.3% | 73 | 19.3% | 24.8% | 30 | 26.0% | 28.5% |
| Nvl 061, OS-32, BME-80 engines | 256 | 10.4% | 15.6% | 42 | 11.1% | 14.3% | 16 | 13.9% | 15.2% |
| starter | 98 | 4.0% | 6.0% | 10 | 2.6% | 3.4% | 2 | 1.7% | 1.9% |
| throttle linkage | 6 | 0.2% | 0.4% | 2 | 0.5% | 0.7% | 1 | 0.9% | 0.9% |
| trapped fuel and oil | 4.65 | 0.2% | 0.3% | 2 | 0.5% | 0.7% | 1 | 0.9% | 0.9% |
| fuel tank, filler and lines | 32 | 1.3% | 1.9% | 5 | 1.3% | 1.7% | 2 | 1.7% | 1.9% |
| muffler and silicone diverter | 22 | 0.9% | 1.3% | 4 | 1.1% | 1.4% | 3 | 2.6% | 2.8% |
| Rotor | 28 | 1.1% | 1.7% | 5 | 1.3% | 1.7% | 3 | 2.6% | 2.8% |
| throttle servo | 18 | 0.7% | 1.1% | 3 | 0.8% | 1.0% | 2 | 1.7% | 1.9% |
| SAS/Coms/Power Package | 357.2 | 14.5% | 21.7% | 76 | 20.1% | 25.9% | 28 | 24.3% | 26.6% |
| autopilot, gyros and mounts | 185 | 7.5% | 11.3% | 40 | 10.6% | 13.6% | 15 | 13.0% | 14.2% |
| receiver and mounts | 62 | 2.5% | 3.8% | 12 | 3.2% | 4.1% | 6 | 5.2% | 5.7% |
| power switch | 5.6 | 0.2% | 0.3% | 4 | 1.1% | 1.4% | 1 | 0.9% | 0.9% |
| substrate and connectors | 8.6 | 0.3% | 0.5% | 2 | 0.5% | 0.7% | 2 | 1.7% | 1.9% |
| power conditioning | 48 | 2.0% | 2.9% | 9 | 2.4% | 3.1% | 2 | 1.7% | 1.9% |
| SAS batteries | 48 | 2.0% | 2.9% | 9 | 2.4% | 3.1% | 2 | 1.7% | 1.9% |
| Sensor/Payload | 85 | 3.5% | 5.2% | 15 | 4.0% | 5.1% | 0 | 0.0% | 0.0% |
| primary payload/camera | 15 | 0.6% | 0.9% | 3 | 0.8% | 1.0% | 0 | 0.0% | 0.0% |
| primary video transmitter | 46 | 1.9% | 2.8% | 8 | 2.1% | 2.7% | 0 | 0.0% | 0.0% |
| video batteries | 24 | 1.0% | 1.5% | 4 | 1.1% | 1.4% | 0 | 0.0% | 0.0% |
| Fuel | 730 | 29.7% | 44.4% | 69 | 18.3% | 23.5% | 10 | 8.7% | 9.5% |
| MGWTO (gmf, lbf, %) | 2457.9 | 100.0% | 100.0% | 378 | 100.0% | 100.0% | 115.4 | 100.0% | 100.0% |
| WOE (gmf, lbf, %) | 1642.9 | 66.8% | 294 | 77.8% | 105.4 | 91.3% | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barrett-Gonzalez, R. High Performance Convertible Coleopter Drones. Drones 2022, 6, 346. https://doi.org/10.3390/drones6110346
Barrett-Gonzalez R. High Performance Convertible Coleopter Drones. Drones. 2022; 6(11):346. https://doi.org/10.3390/drones6110346
Chicago/Turabian StyleBarrett-Gonzalez, Ronald. 2022. "High Performance Convertible Coleopter Drones" Drones 6, no. 11: 346. https://doi.org/10.3390/drones6110346
APA StyleBarrett-Gonzalez, R. (2022). High Performance Convertible Coleopter Drones. Drones, 6(11), 346. https://doi.org/10.3390/drones6110346